舰载跟踪雷达交流伺服系统设计与建模仿真
2022-10-12晏佳胜
晏佳胜
(中国电子科技集团公司第二十研究所 西安 710068)
0 引言
舰载跟踪雷达伺服系统的主要作用有两方面:一是隔离舰船摇摆,保持雷达天线水平;二是驱动雷达天线与电子跟踪通道一起完成对目标的精确角度跟踪。目前,大部分舰载跟踪雷达仍使用直流有刷力矩电机组成的直流伺服系统,其缺点是机械式换向器存在电刷磨损、积碳等问题,换向器需要定期维护,否则将影响伺服系统性能和寿命。随着稀土永磁材料和电力电子等技术的快速发展、高性能控制方式如空间电压矢量(SVPWM)控制等的日益成熟,以永磁同步电机(PMSM)作为执行器的交流伺服系统得到了快速发展和大量应用,交流伺服系统不仅能实现高精度控制,而且其较高的功率密度、几乎免维护的特点使其在越来越多的应用场合取代传统的直流伺服系统。本文旨在设计一套采用SVPWM控制方式的PMSM舰载跟踪雷达交流伺服系统,提出硬件和软件设计方案,并在Matlab中进行建模仿真分析。
1 控制原理
1.1 PMSM交流伺服系统控制原理
PMSM交流伺服系统控制原理如图1所示,它是典型的位置、转速和电流三闭环控制系统。控制器采样PMSM定子三相电流,经过Clark-Park变换转化为直轴分量和交轴分量作为反馈电流,直轴电流采用=0的控制策略,交轴电流给定由转速环PI校正计算得出,误差和误差经PI校正和Park逆变换得到当前位置的目标电压矢量,通过SVPWM控制逆变器输出目标电压矢量,以产生逼近圆形的定子磁链,实现对PMSM转矩的精确控制。
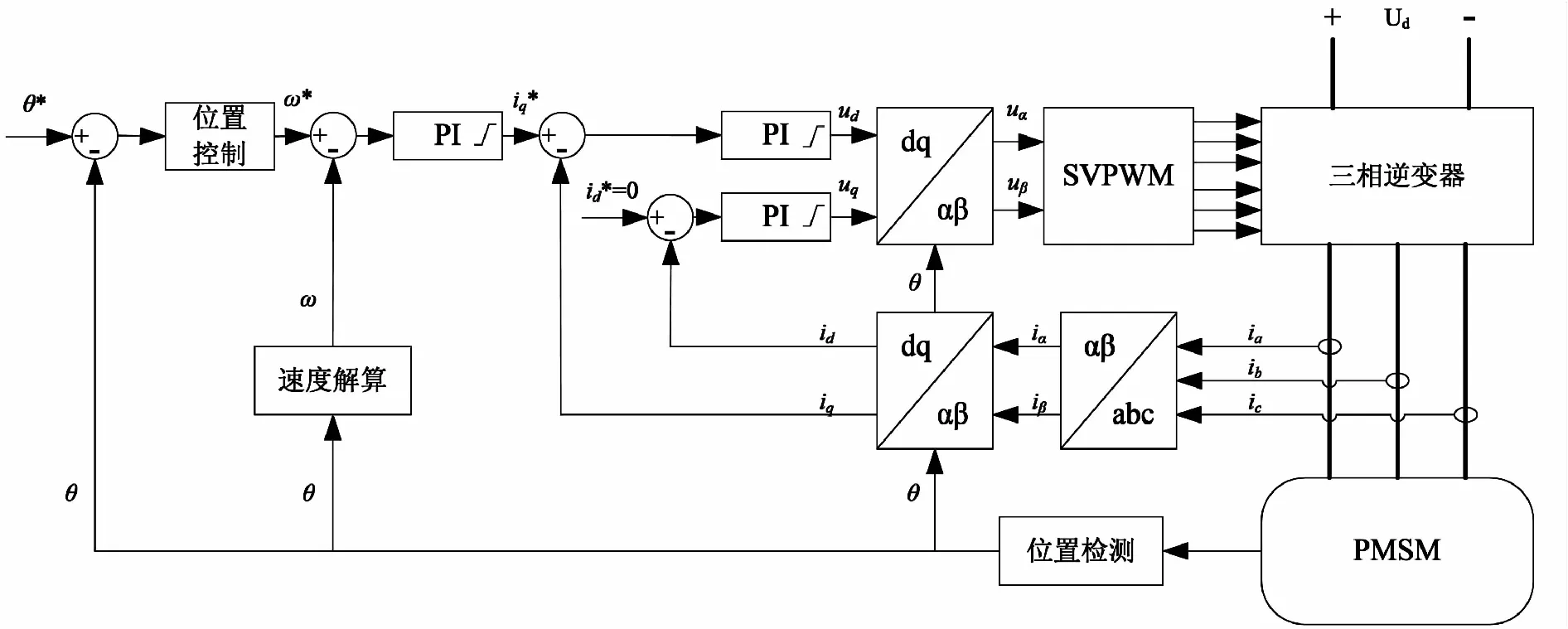
图1 PMSM交流伺服系统原理图
1.2 SVPWM原理
SVPWM技术旨在控制逆变器输出电压矢量,使电机空间形成圆形旋转磁场,以产生恒定的电磁转矩。当电机以三相平衡电压供电时,定子磁链矢量表示为
=e
(1)
忽略定子电阻压降,电压与磁链关系为

(2)
由式(2)可以看出,当磁链幅值一定时,电压矢量的大小与转子角速度成正比,方向与磁链方向正交,磁链矢量旋转一周时,电压矢量也旋转一周,且轨迹与磁链重合。因此,构造圆形轨迹旋转磁场的问题就转化为构造圆形轨迹电压矢量的问题。
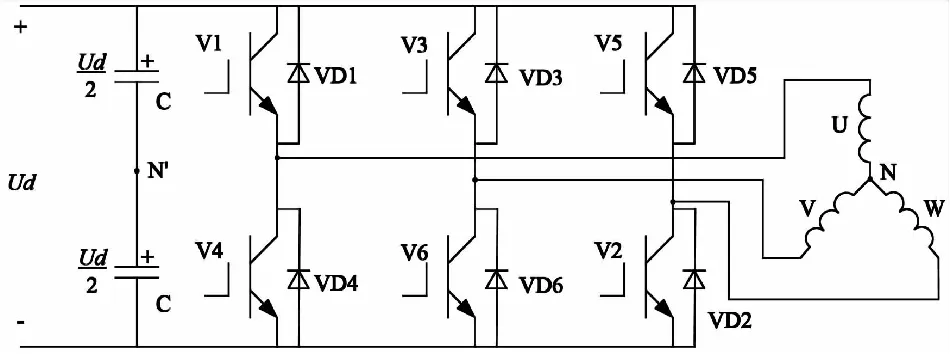
图2 PMSM驱动模型
PMSM驱动模型如图2所示。按照上下管互补导通的规则,6个功率管共有8种不同组合,可以输出8种电压矢量。规定三相桥上管导通表示为“1”,关断为“0”,如V1、V6、V2导通,记为电压矢量(100),功率管开关组合与对应电压矢量如表1所示。

表1 功率管开关组合与对应电压矢量表
将8种电压矢量分布到三相ABC坐标系和两相坐标系中,形成如图3所示的电压空间矢量图,其中(000)和(111)是无效矢量,也称为零电压矢量,其余6个有效电压矢量将空间平均分为6个扇区,每个扇区占60°电角度。

图3 电压空间矢量图
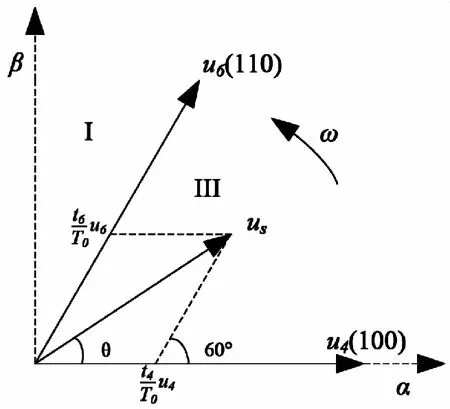
图4 Ⅲ扇区电压矢量合成示意图
2 控制系统方案设计
由于天线为大转动惯量负载,且雷达对伺服系统的跟踪精度有较高的要求,因此,采用低转速大力矩的PMSM直接抱轴的驱动方式,以提高精度和传效率。采用具有粗、精双通道的旋变配以RDC轴角变换电路,实现位置的高精度测量。采用平台罗经测量舰船摇摆,光纤陀螺测量天线在大地坐标系下的角速度,构成速度闭环,以隔离舰船摇摆,使雷达天线在大地坐标系下稳定。采用霍尔式电流传感器,并用高精度A/D采样电流实现电流数字化。
2.1 硬件方案设计
伺服系统硬件方案如图5所示,主要包括控制模块、驱动模块、反馈数据采集模块和通信模块。
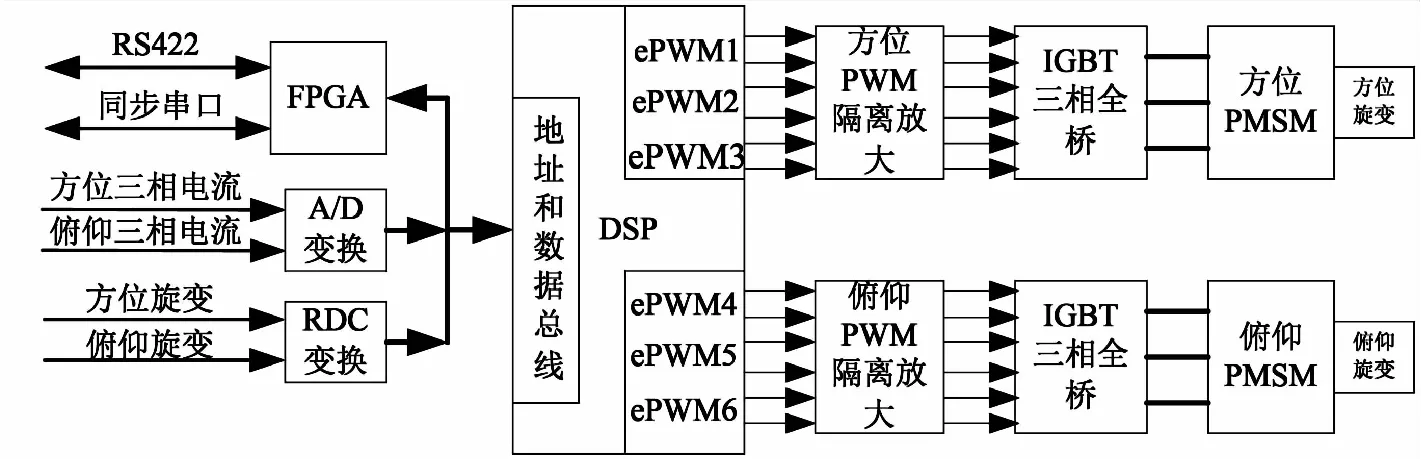
图5 伺服系统硬件方案
控制模块采用DSP和FPGA 的组合,DSP采用TI公司TMS320F28335,该芯片指令周期为6.67 ns,主频达到150 MHz,作为控制的核心,它主要完成控制指令接收与处理、三闭环控制、数字PI校正和SVPWM计算与输出等核心功能;FPGA采用XILINX公司的X3SC200AN,它主要完成地址译码、RS422通信、同步串口通信和逻辑控制等功能。驱动模块包括方位和俯仰PWM隔离放大电路和IGBT三相桥,主要完成对PWM信号的隔离与驱动放大,驱动三相桥输出电压矢量。反馈数据采集模块包括方位和俯仰电流传感器、双精度旋变以及相应的A/D变换电路和RDC变换电路,主要完成方位和俯仰电机三相电流数采样和位置信号采集,并将电流和位置反馈信号通过总线接口送入DSP。通信模块中,采用同步串口实现与雷达中心机通信;采用RS422接收平台罗经和光纤陀螺数据。
2.2 软件方案设计
由于方位和俯仰控制基本相同,在此只写出方位控制的软件方案。伺服系统控制软件主要包括初始化子程序、工作主程序和ePWM1下溢中断子程序等。
初始化程序流程图如图6所示,它主要包括DSP时钟、I/O口、ePWM模块、DSP中断和变量等的初始化以及开机自检等程序。
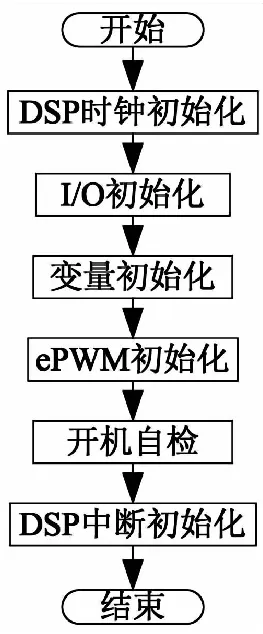
图6 系统初始化子程序流程图
工作主程序流程图如图7所示。它主要完成天线速度解算、坐标变换、控制量计算、位置环校正、速度环PI校正和数据发送等功能。
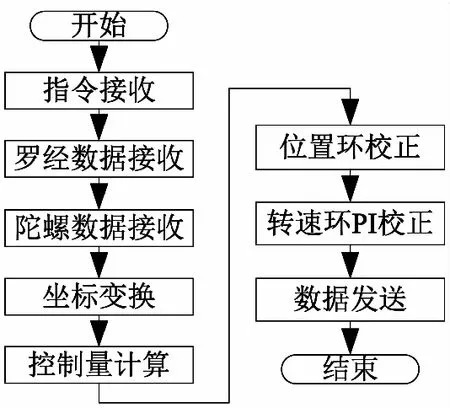
图7 工作主程序流程图
ePWM1下溢中断子程序流程图如图8所示。它主要完成PMSM定子三相电流和转子位置的读取、通过Clark-Park变换、电流环PI校正、Park逆变换、SVPWM计算和PWM输出等功能。
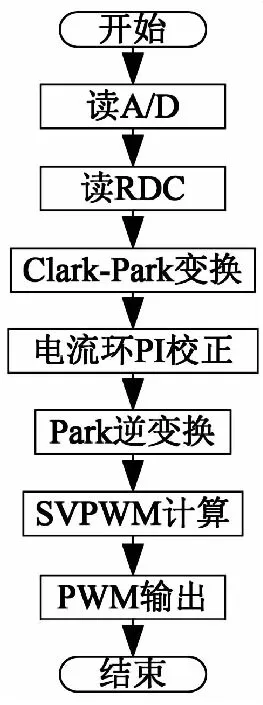
图8 ePWM1下溢中断程序流程图
3 仿真分析
按图1所示PMSM交流伺服系统控制原理,在Matlab Simulink中搭建仿真模型如图9所示,本文仅以雷达伺服系统方位为例叙述。
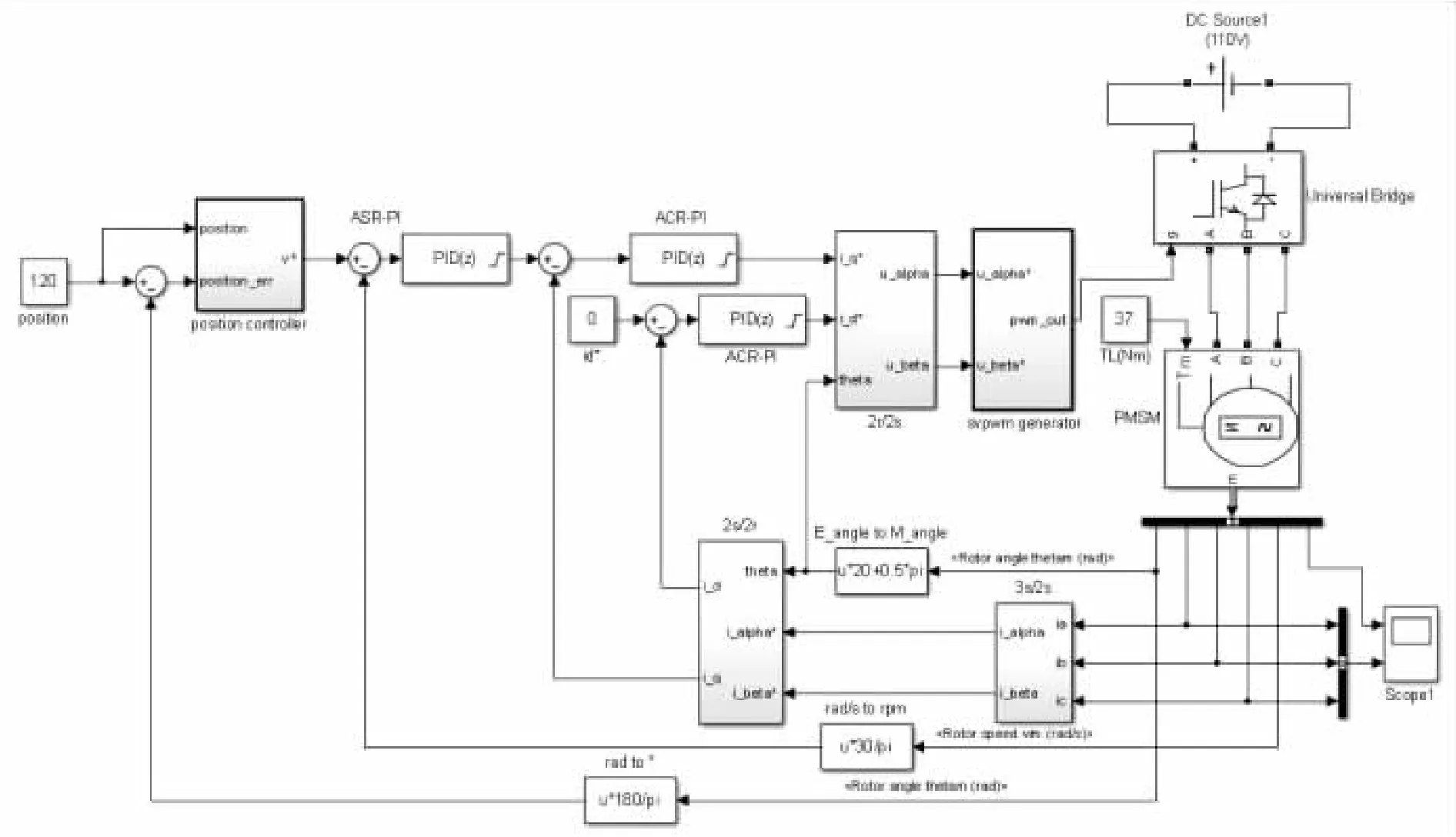
图9 PMSM交流伺服系统仿真模型
雷达伺服系统方位在实际运行过程中主要克服摩擦力矩、风力矩以及加减速过程中天线的惯性力矩。系统负载为:摩擦力矩约为9.8 Nm,风力矩最大约为37 Nm,转动惯量约为26 kg·m。系统要求天线最大角速度≥2.6 rad/s,最大角加速度≥3.5 rad/s。
根据需求,选取的方位电机的参数为:
额定电压110 V;极对数20;定子相电阻2.9 Ω;定子相电感16 mH;最大空载转速60 rpm;峰值转矩240 Nm;峰值电流22 A;转子转动惯量0.3 kg·m。为保证跟踪雷达跟踪精度,伺服系统需满足各种工况下系统对天线运动的角速度和角加速度要求。
3.1 速度环仿真
通过速度环仿真,可以看出伺服系统的启动加速性能、调速性能和抗负载扰动性能等。
伺服系统满载启动运行仿真结果如图10所示,仿真结果可以看出,启动瞬间电机输出最大转矩239 Nm,随着转速增加,输出转矩逐减小;转速稳定到设定值30 rpm(3.1 rad/s)用时0.61 s,平均角加速度达5.1 rad/s。
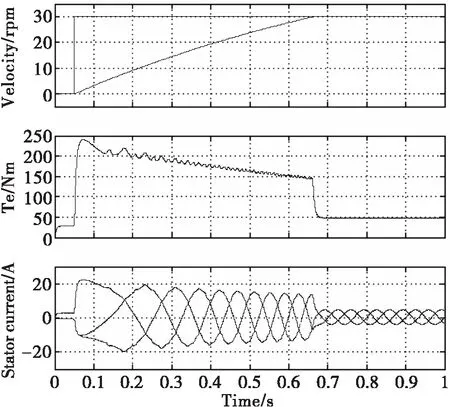
图10 满载启动运行
为了在满足加速度指标的同时提高启动的平稳性,限制输出最大转矩,以达到恒加速度启动的效果。伺服系统恒加速度启动运行仿真结果如图11所示,启动过程中,电机输出转矩维持在150 Nm,天线以恒加速度启动,转速到达设定值30 rpm(3.1 rad/s)用时0.83 s,角加速度为3.8 rad/s,启动结束后,输出转矩迅速调整到49 Nm左右,定子电流也迅速减小,进入恒转速运行状态。启动平稳,角加速度和角速度均能达到要求。
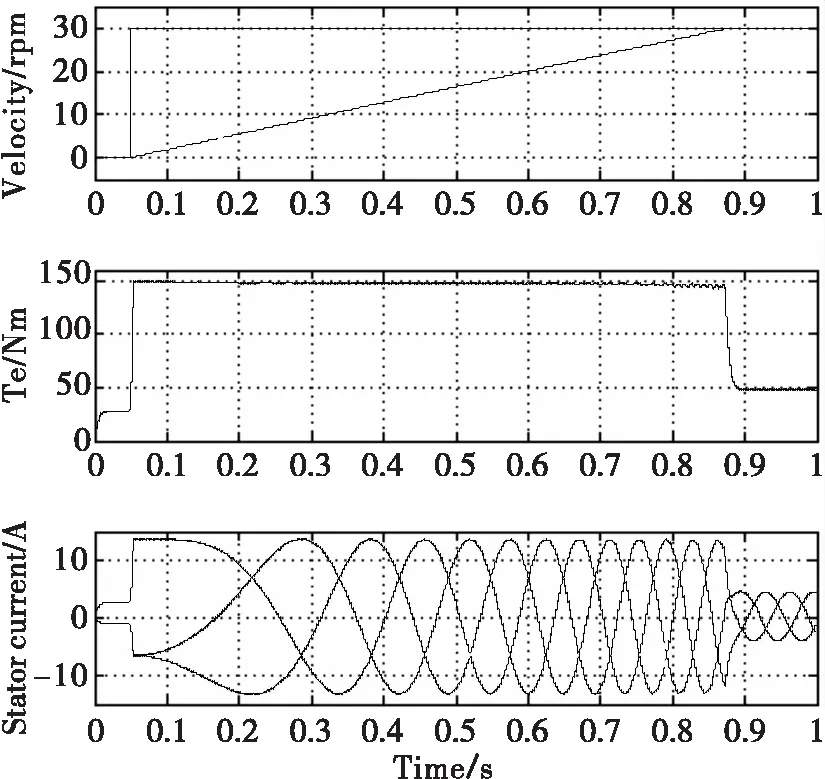
图11 恒加速度启动运行
天线在实际运行中需要经常加减速以完成对目标的准确跟踪,这对系统的调速性能提出了要求。伺服系统满载调速运行仿真结果如图12所示,系统以满载启动,0.83 s加速到30 rpm(3.1 rad/s)并以恒转速运行,在1.2 s时,将目标转速调整为10 rpm(1.05 rad/s),系统在0.3 s内以恒加速度达到目标转速,角加速度达到-6.9 rad/s,满足系统要求。
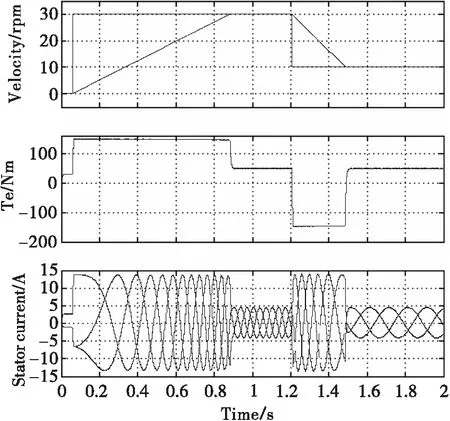
图12 满载调速运行
实际运行中,风力矩是随机的、不断变化的,因此,伺服系统需要有较强的抗负载变化的能力。伺服系统变力矩运行仿真结果如图13所示,系统在风力矩为0 Nm条件下启动,0.6 s达到目标转速30 rpm(3.1 rad/s),此过程中系统输出转矩以克服摩擦力矩和惯性力矩。在1 s时突加风力矩37 Nm,并在1.4 s时撤销风力矩,由图13可以看出,风力矩的突然变化,对系统转速只有很小的影响,系统对负载转矩响应迅速准确,具有很强的抗负载突变能力。
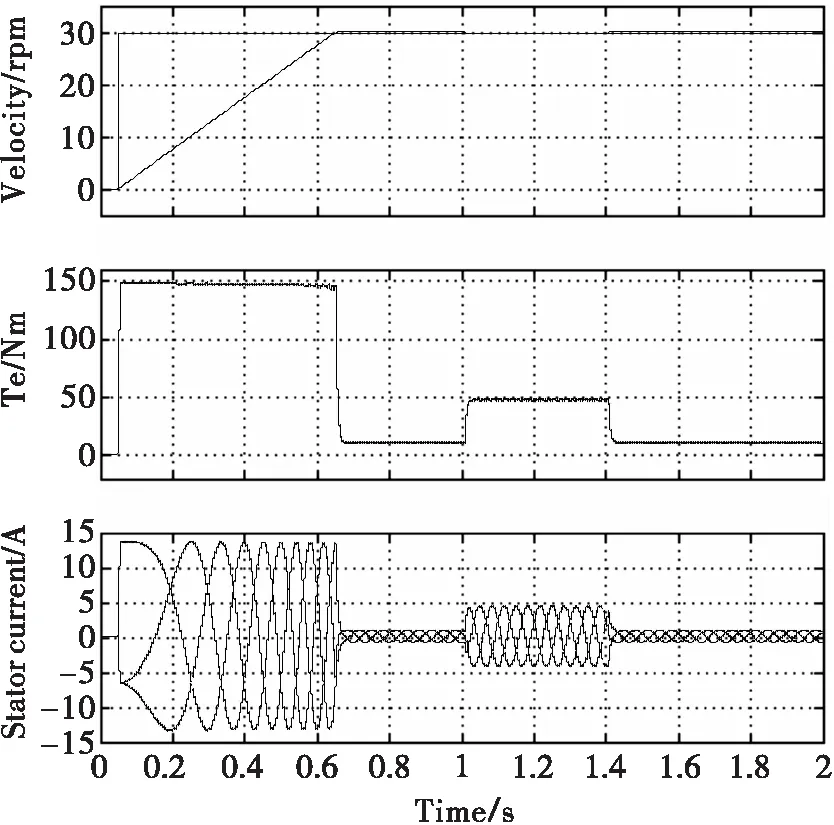
图13 变力矩运行
3.2 位置环仿真
雷达伺服系统最终目标是完成目标的位置跟踪,位置环仿真可以看出系统位置控制的精度,仿真结果如图14所示。给定的位置信号为0时刻180°的阶跃信号,由仿真结果可以看出,系统经历加速、匀速和减速过程,精准地停留在180°位置处。
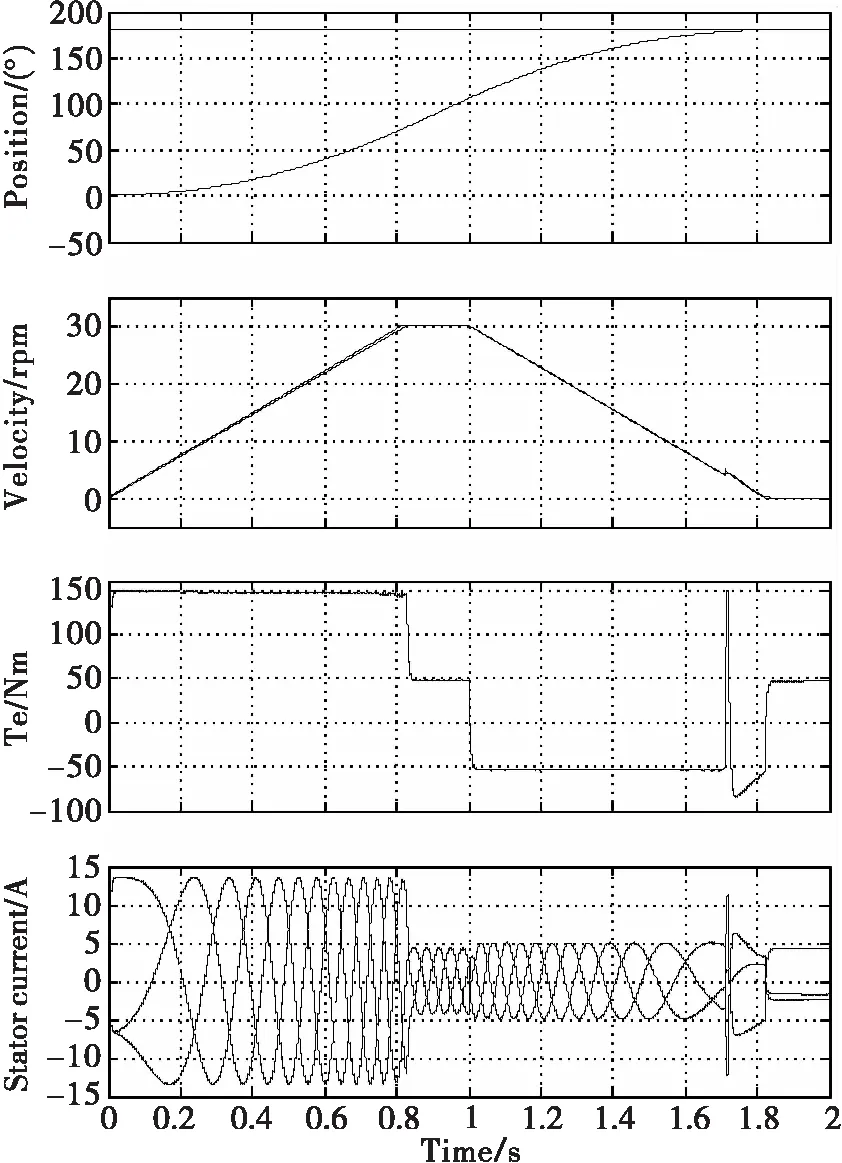
图14 位置环仿真结果
4 结束语
本文对交流伺服系统和SVPWM原理进行了简要的叙述,提出了应用于舰载跟踪雷达的交流伺服系统硬件和软件方案,并在Simulink中以选取的实际参数建立了系统仿真模型,对雷达伺服系统在实际运行中的不同工况进行仿真分析,验证了设计方案的正确性和可行性。