某二维相控阵雷达中心机的设计与实现
2022-10-12任媛媛路焜鹏高一栋
任媛媛 路焜鹏 高一栋
(1.西安电子工程研究所 西安 710100;2.陆装驻西安地区军事代表局 西安 710000)
0 引言
与传统的机械扫描雷达相比,二维相控阵雷达通过控制不同发射子阵的馈电相位来实现多种波束不同指向,具有波束扫描迅捷的优点,能够实现凝视探测,从而聚集更多的能量、更长时间的积累。充分利用这些时间和空间资源,可提高雷达波束覆盖范围、探测距离、数据率、系统多功能和多目标能力,从而实现对“低慢小”目标的有效探测。
然而,雷达的多功能、多目标能力通常受到雷达各项资源、计算机处理能力等因素的限制,如阵元分割,通常节省了搜索时间资源,但波束的展宽,会导致精度与距离性能有所下降。如何在搜索和跟踪不同功能下实现对各项资源的优化利用;如何实现系统对多目标的精确搜索和跟踪;如何设计模式相互转换实现多功能等,这些都与系统资源息息相关。因此,对二维相控阵雷达的系统资源进行合理布局和规划,就成为雷达设计中的重要问题。
雷达中心机主要用于二维相控阵雷达系统各资源协调、调度和控制,是雷达控制的核心。其设计在合理规划雷达的时间与能量资源基础上,通过高效调度雷达所要执行的任务,合理分配系统资源,以充分利用相控阵天线技术特点及其应用潜力,实现雷达的多功能、多任务能力。文章基于某二维相控阵雷达中心机的设计,采用嵌入式实时多任务管理系统,利用天线波束敏捷性,实现高效搜索、目标精确跟踪和多任务工作能力。
1 组成及功能分析
1.1 雷达系统组成
某两维有源相控阵雷达组成如图1所示,天线采用4子阵设计,且4个子阵单独设计接收通道。这些子阵既可以协同工作,实现远距离、高精度的目标探测,也可以独立工作,分时完成不同功能。中心机与数据处理机、信号处理机、波控机、频综以及伺服驱动机构相互通信,接收终端发送的工作命令,对各分系统实施实时控制,实现全机工作。

图1 系统组成示意图
1.2 功能划分
中心机负责雷达系统全机控制和各分系统的协同工作,包括工作参数产生、时序控制、工作模式管理、数据分发。
1.2.1 系统初始化
用于完成工作参数的产生。系统上电后首先完成对硬件接口的初始化,包含板卡、通信接口(串口、网络、PCIE、ARINC429)的初始化;其次加载操作系统,初实现对VPX设备的总线地址映射;之后进行对AD采样、目标处理、数据处理、目标识别等单元参数的初始化;最后完成其它分系统的初始化。
1.2.2 定时控制
用于控制系统工作所需各种定时信号的产生,包括信号处理零距离脉冲、频综发射触发、波驻脉冲、发射触发脉冲、接收机保护脉冲、PRF、CPI信号等,实现系统时序管理。
1.2.3 工作模式管理
工作模式管理是中心机的核心功能,也是雷达系统控制的核心。收到终端操控命令后,中心机依据严格的系统时钟,完成各模式下雷达资源调配工作。
为实现二维相控阵雷达阵元和波束资源的合理利用,根据雷达不同使用环境和用途,系统设计多种工作模式:含地空模式、被动侦察模式、校准模式、自检模式、待机模式等5种主要模式。其中,地空模式和被动侦察模式为主要工作模式。
地空模式下,中心机控制频综产生工作所需信号;控制波控机发射对应赋形波束,实现对空、地、海扫描;控制信号处理机实现对运动目标检测、恒虚警控制等功能。
自检模式用于对全机各分系统进行故障自检并上报,为上电初始默认模式。系统上电自检完成后自动进入被动侦查模式;其他状态下,中心机接收终端自检命令后,进入该模式,自检结束回到待机模式。
被动侦查模式为避免敌方的电子侦查设备,雷达处于侦听状态,对战区的电子设备所用的频率、时宽、带宽、位置等信息进行解析。开机自检模式结束后即进入该模式,在确认没有辐射单元后,再转入地空模式,进行雷达主动探测,此时可进行干扰或者直接进行打击。其他状态下,中心机接收终端命令进入该模式,始终处于被动侦测状态,当再次接收到模式转换命令时,转入其他状态。
待机模式为各模式切换的中间态,用于停止工作等待工作状态命令。此时雷达有工作所需的各项定时,但是不发射电磁波主动工作,也不被动侦听辐射源,天线停止转动。待机模式可进入其余各个模式。
校准模式用于进行系统幅相一致性校准等功能。
不同模式下,系统发射赋形、信号形式不同,中心机控制任务优先级不同。模式间,既可相互转化,也可在接收到终端命令后直接转化。其相互转换条件如图2所示。
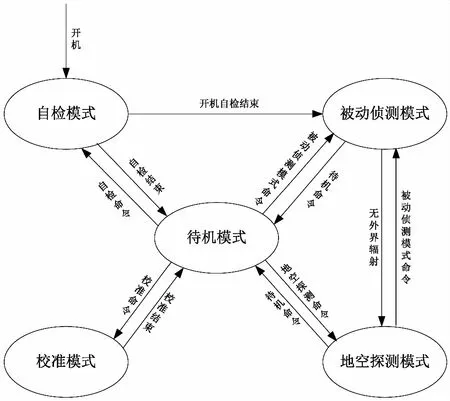
图2 系统各模式转化示意图
中心机需要在不同模式下,进行优先级以及资源调度,实现系统功能。
1.2.4 数据分发
接收操控终端的模式控制命令,产生不同工作模式下的各项参数及定时,在定时的不同时刻,将参数通过各种接口发送给分系统,控制整个雷达协调有序工作。此外,中心机根据惯导信息和波束指向信息,进行数据解算,控制伺服(对空需提供360°旋转)与波控机,完成对雷达波束的稳定控制。
2 中心机软件设计关键问题
2.1 任务优先级分析及设定
雷达的5种主要工作模式中,地空模式为主动探测模式,也是系统最主要的工作模式。该模式下,系统有搜索、截获确认和跟踪3种状态,相应的任务分为以下三种状态,根据重要程度,优先级依次递减:
1)跟踪:对已经建立跟踪的目标维持稳定波束跟踪。中心机分辨中断识别号,进入任务序列,从跟踪目标地址读取目标相关信息,根据目标信息,如行驶方向、速度,进行威胁排序,确定跟踪目标的优先级。优先级从高到低,对所有目标依次进行跟踪。在对目标跟踪完成后,进入跟踪前的搜索状态。
2)截获确认:对于搜索的目标,利用原参数发射确认波束,降低虚警。当时间资源紧张时,该任务队列将降低级别,适当时刻选择删除。
3)搜索:对指定空域按照顺序波位进行照射以发现目标。该模式下,雷达发射针状波束,对关心区域完整覆盖,当搜索到疑似目标时,通过TAS方式进行跟踪。中心机进入该模式后,预置参数,设置时序,产生波驻中断,再根据模式、位置、威胁度、目标饱和度、飞行状态等信息产生当前工作参数,雷达工作周期为波驻中断周期。
在这3种任务的设计下,每个波位结束后,中心机将查询多任务序列,并从高优先级到低优先级执行相应的任务。任务序列中各个目标信号的处理过程如图3所示,这种设计方式与发现和确认是一致的。

图3 主动探测处理流程
若系统正以某种模式工作,接收到外部指令,在对新参数确认或纠错后,停止当前任务,产生新任务,重新循环工作,工作流程如图4所示。

图4 中断处理流程
被动侦查模式下,中心机首先控制天线产生大波束宽度发射赋形波束;在覆盖频率范围内,以大带宽为一个单元,采用频率步进对频率进行遍历,判断是否存在辐射源,如果存在辐射源,在对应的频率单元内,采用小带宽信号为一个单元,继续使用频率步进,对存在辐射源的频率范围进行频率迭代搜索;判断是否存在该辐射源,如果存在就锁定该频率,存储该辐射源对应的方位角和俯仰角;对雷达平台进行移动一段距离,用该锁定的频率和窄波束就行空域搜索,如果搜索到该辐射源,采用两点定位的方位确定该辐射源的位置信息。
其余待机、校准和自检模式均为系统辅助模式,随时可被打断,其优先级均低于工作模式。
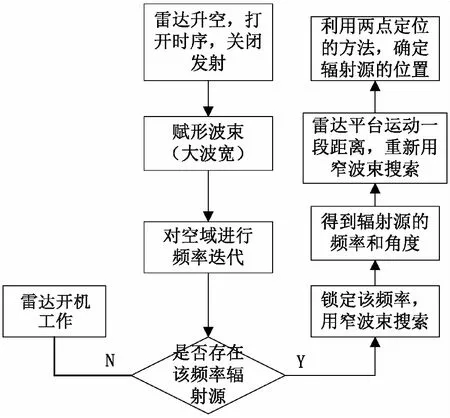
图5 被动检测处理流程
2.2 自适应调度技术
自适应资源调度技术,就是以搜索、跟踪为起始直到目标输出,根据功能划分,形成多个任务序列,合理配置时间、能量、空间资源,对各项任务进行分级。如对外界指令响应设置为优先级最高,以便雷达能够迅速反应操作手的意图;惯导数据直接影响波束指向及角精度,优先级较高;数据打包及转发,不影响系统实时性和性能,优先级较低;威胁度大的目标优先级较高,无威胁的目标,在时间资源紧张的情况下可丢弃,删除该任务队列。当前的事件执行,是将最重要、最急迫任务,放入执行队列,雷达将资源分配给该事件,事件执行完毕后,该任务退出,将调度下一个关键事件,调度算法如图6所示。

图6 调度流算法流程
3 实现
中心机作为核心控制系统,功能众多,操作复杂,处理信息量大,其处理实时性直接影响到系统精度。因此,其硬件架构为基于VPX总线的高性能单板计算机,采用PowerPc2020处理器(主频1GHz),软件采用Workbench工具开发,运行VxWorks系统,具有抢先式多任务处理和出色的可靠性和实时性的特点。利用该嵌入式操作系统,中心机软件从架构上采用分层模块化设计,采用自适应调度技术,完成系统资源规划和分配。
运行后,中心机能够稳定高效调度任务,系统实时性和资源满足要求,雷达系统对外探测结果如图7所示。
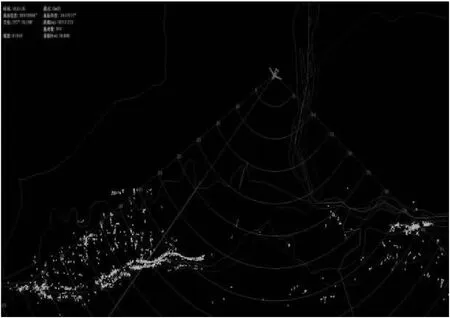
图7 雷达探测结果
4 结束语
本文论述了某二维相控阵雷达中心机的设计思路和实现方案,对设计中任务优先级规划和模式转化、资源调度策略等关键问题进行重点阐述并给出实现流程图。通过雷达实际飞行试验,验证了在中心机的控制下,雷达能够对空地目标稳定搜索与跟踪,对外部干扰实施良好有效检测,总体性能表现出色。试验结果表明,合理规划中心机任务优先级与调度策略,使其能够正常稳定工作,对相控阵资源进行综合调度与管理,能够实现对频率、能量、空间、时间的均衡配置,满足对地、对空、被动探测等探测功能需要,方案具有较强工程价值。