一种时频维联合处理的海面小目标检测方法
2022-10-12王冬华
王冬华 沈 洋 周 骏 茆 禹
(中国船舶集团有限公司第八研究院 南京 211153)
0 引言
海杂波是影响对海探测雷达检测性能的关键因素。相较于军舰、轮船等大型目标,其反射面积较大,目标回波幅度较强,即使在比较恶劣的海况下,也能具备一定的信杂比,但是对于一些反射面积较小的渔船、小艇等小目标,其目标回波信杂比往往处于或低于临界可检测状态,虽然通过长时间帧间积累可以有效提升目标回波的信杂比,但对于渔船、小艇等具备一定运动速度的运动目标,很难实现稳定的长时间帧间积累;慢速目标的多普勒信息很容易被海杂波的多普勒旁瓣掩盖,为了在海杂波下检测慢速小目标,海杂波的抑制至关重要,传统的动目标显示(MTI)与动目标检测(MTD)对零速滤波器附近的目标衰减过大,使得对慢速目标的检测性能严重下降。针对上述问题,本文提出的时频维联合处理方法在频域维检测时会实时感知海杂波的中心频率与谱宽,并且根据迭代更新的海杂波中心频率对原始I/Q数据进行频谱搬移,随后进行相参处理,频率维检测后会造成虚警率升高,因此需进行时域维检测,根据目标回波的距离-方位特性抑制剩余海杂波,提高小目标在强海杂波下的可见度,最后通过仿真及实验验证了该方法的可行性与有效性。
1 时频维联合检测方法
本文采用频率维和时域维联合处理的方法提高雷达对海上小目标的检测性能,处理流程如图1所示,频率维检测模块接收匹配滤波后的I/Q数据,将其求模后送至时域维检测模块,最后将检测后数据送至显控和数据处理。

图1 处理流程图
1.1 频域维检测
对海探测雷达,近程海杂波较强,且成片出现,若仅仅依靠传统的非相参或者相参处理提取目标的幅度信息去检测,很难从较强的海杂波中提取出弱小目标。不同于传统的MTD处理方法,频域维检测在接收匹配滤波后的I/Q数据后,实时感知并迭代更新建立杂波中心频率图和杂波谱宽图,实时选择具有不同凹口的滤波器组,有效保证了不同海况下弱小目标的杂波可见度,处理流程如图2所示。
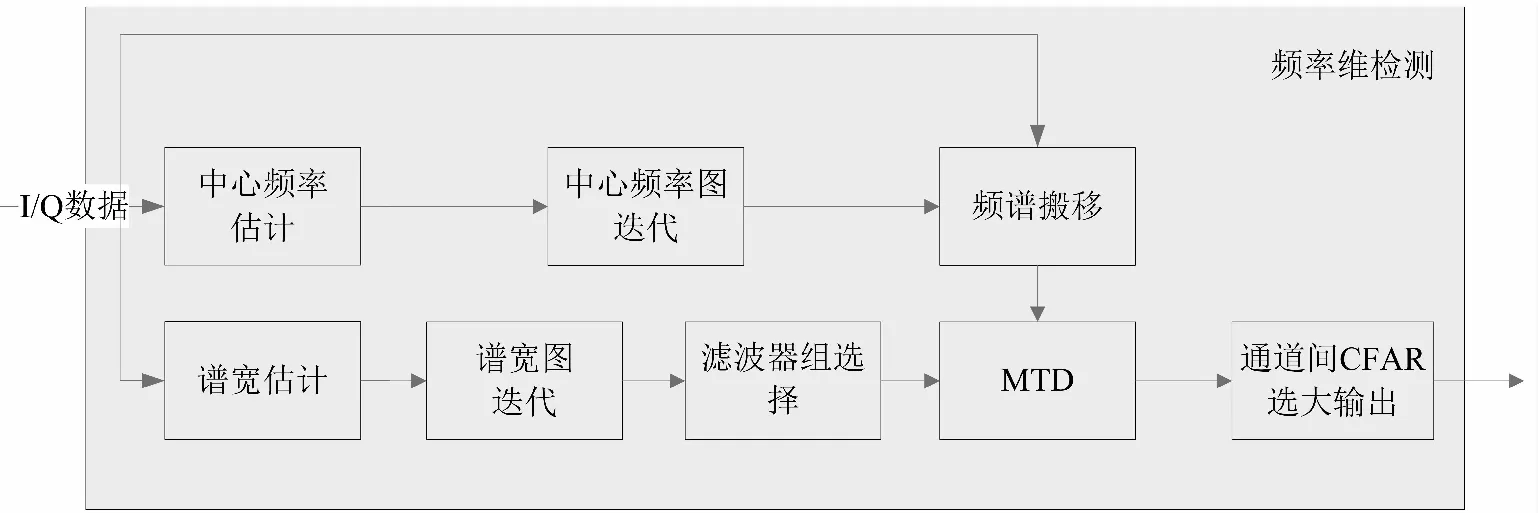
图2 频率维处理流程图
匹配滤波后的I/Q数据首先采用“相关函数法”进行中心频率估计和谱宽估计,然后进行中心频率图和杂波谱宽图的建图及实时迭代更新,建图过程中需要设定建图的距离、方位格子大小以及迭代因子,接着根据当前回波所处的方位信息从中心频率图中取出对应方位格子所存储的中心频率值,进行I/Q数据的频谱搬移,同时根据当前回波所处的方位信息从谱宽图中统计一定距离范围内的频谱宽度,根据统计的频谱宽度去选择不同凹口的滤波器组,然后进行MTD相参处理,最后对MTD相参处理后的个通道分别进行求模、CFAR处理并选大输出,其中CFAR处理一般采用一维单元平均恒虚警算法。频率维处理会造成检测结果虚警率升高,通过后续时域维检测可以有效解决这一问题。
1.1.1 相关函数法
“相关函数法”即利用雷达接收回波相邻两个重复周期的相位差对杂波的平均多普勒频率进行估计。杂波可表示为如式(1)形式。
()=()e(+)+()
(1)
其中:()为复包络;为杂波多普勒角频率;为初相;()为加性噪声。延迟一个重复周期后可写成
(-)=(-)e((-)+)+(-)
(2)
它们的相关函数为
()=[()(-)]=()e
(3)
其中:为雷达的重复周期,()=[()(-)]。因为()为窄带信号,即()≈(-),那么()=[()(-)]=[|()|]为一实数。由式(2)可得
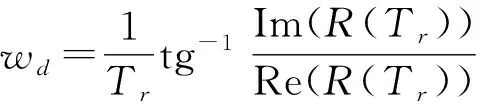
(4)
其中:tg(·)反正切函数,其取值范围为[-π,π]。用时间平均来代替统计平均后,得到如式(5)所示估计量。

(5)
其中:表示杂波在不同脉冲相同距离单元的采样序号。因此,结合式(4)和式(5)得到杂波的平均多普勒频率估计值为
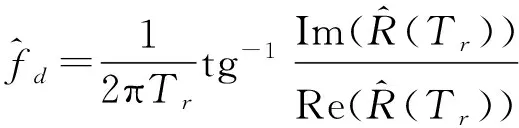
(6)
112 杂波谱建图
为了降低频谱搬移对运动目标自身的影响,每个距离单元估算的中心频率结果需要经过平滑处理,通过设定距离-方位格子大小将雷达探测范围划分为多个单元,通过杂波图技术迭代更新每个格子的中心频率及谱宽信息,产生不同距离单元I/Q数据频谱搬移需要的多普勒频率。每个距离-方位格子的中心频率及谱宽信息采用一阶递归模型更新为
()=(1-)(-1)+()
(7)
其中:表示天线扫描周期;()表示当前扫描周期得到的中心频率估算结果;(-1)表示杂波图上一圈估计背景值;()表示通过式(7)得到的新的杂波图背景值;是递归因子,0<<1。
1.2 时域维检测
时间维检测主要利用目标回波距离-方位特性。对海探测雷达近程海杂波较强,在进行恒虚警(CFAR)处理后,会出现较多离散杂波点,这些杂波点在区域内随机分布,通过统计回波的距离、方位特性以及目标的幅度起伏特性可以有效剔除这些海杂波经过CFAR处理后的剩余,时域维检测流程如图3所示。
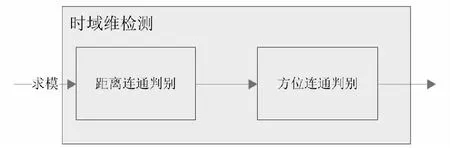
图3 时域维处理流程图
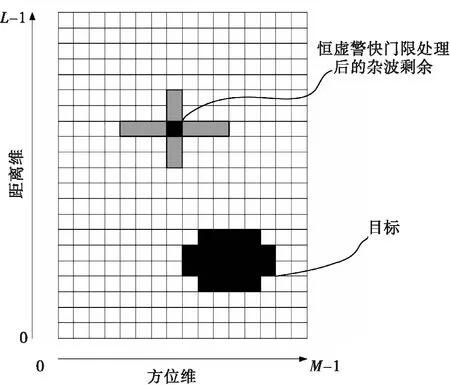
图4 CFAR处理后回波特性示意图
距离连续性判别即CFAR处理后连续5个距离单元是否存在3个及以上距离单元幅度值不为0;方位连续性判别即在距离判别的基础上判别同一距离单元在方位维是否连续存在个方位单元幅度值不为0,若是则判定该被检测单元为目标,否则判定为杂波。
2 仿真校验
2.1 频域维仿真
2.1.1 中心频率估计仿真
频率维检测中采用的是“相关函数法”估算目标的中心频率及谱宽,假设雷达重复周期为290 μs,时宽20 μs,带宽8 MHz,采样频率10 MHz,相关脉冲数为10。假设在距离雷达35 km处有1个目标,速度为40 m/s,输入信噪比为0 dB,地杂波和动杂波分别位于5~10 km和15~20 km处,杂噪比均为50 dB,其中地杂波平均多普勒频率为0 Hz,谱宽为6.4 Hz,动杂波平均多普勒频率为100 Hz,谱宽为24 Hz。对回波信号进行脉压,对脉压输出利用相关函数法进行测频,结果如图5所示。
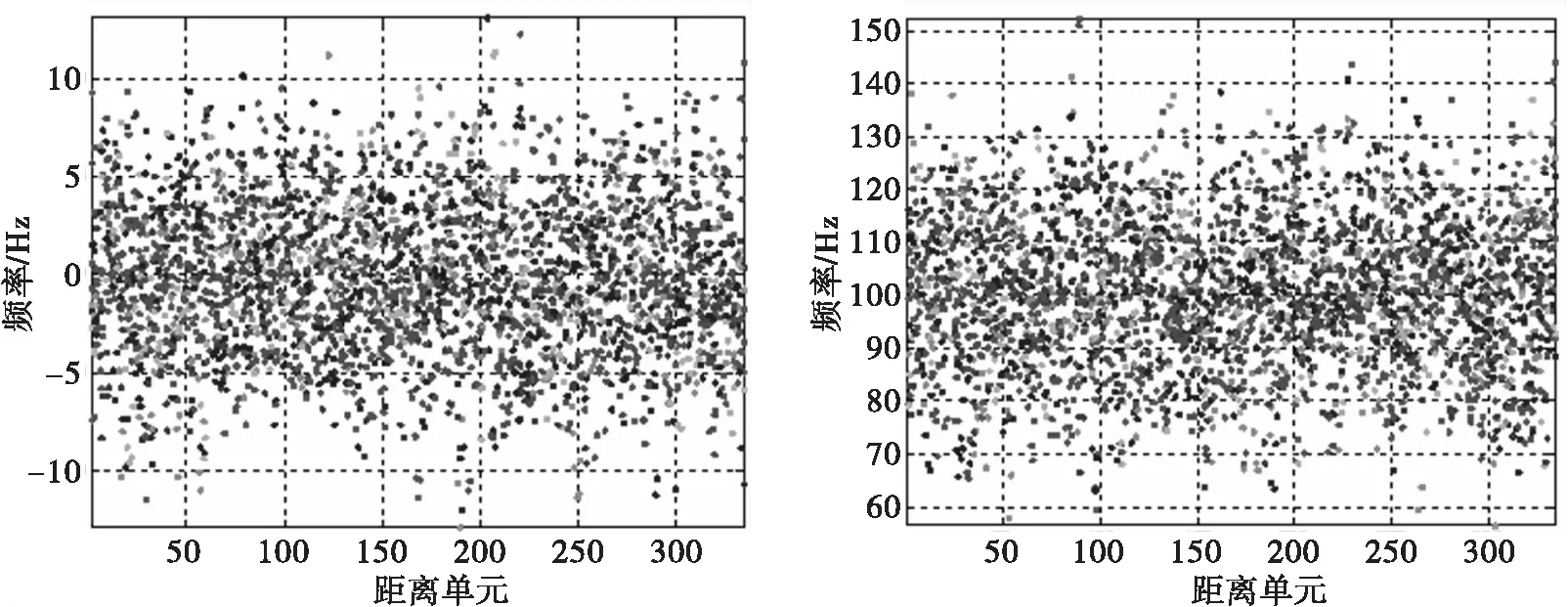
图5 相邻PRT地杂波/动杂波测频结果
由图5可以看出,利用“相关函数法”对脉压结果的杂波区进行测频,相邻重复周期的测频结果有一定的差距,但均在预设值上下波动,也即存在一定的谱宽。取相同距离单元不同PRT测频结果的标准差,然后对所有距离单元求平均即可得到谱宽。表1给出了相关函数法估计杂波多普勒频率的统计结果。
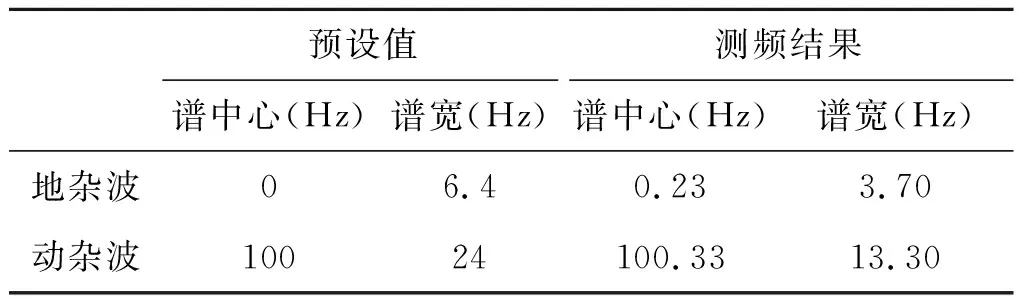
表1 相关函数法地/动杂波测频结果
2.1.2 频域维检测效果仿真
采集某对海探测雷达在4级海况条件下的脉压后I/Q数据,采用常规的非相参处理技术,如图6左图所示,从图中可以看出,60 km范围内分布着成片较强海杂波,海面固定目标、大船以及渔船等目标完全淹没在海杂波中难以检测。采用本文所述频率维检测方法,如图6右图所示,可以看出,海杂波得到了有效抑制,海面固定目标、大船以及渔船等目标能够很容易检测出来,极大地提高了目标在杂波中的可见度。
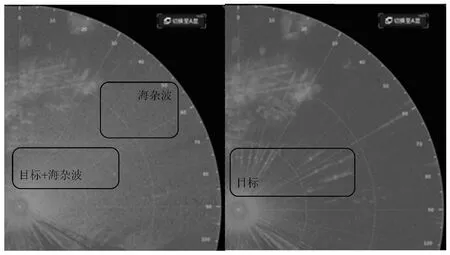
图6 频率维检测效果图
2.2 时域维检测效果仿真
时域维检测先进行距离维连续性判别,再进行方位维连续性判别,可以有效抑制海杂波经过CFAR处理后的剩余。某雷达视频数据经过CFAR处理后如图7左图所示,可以看出近程30 km区域内存在较多的离散海杂波剩余,在这种点迹密度状态下,严重影响目标的跟踪,经过时域维检测处理后如图7右图所示,可以看出离散剩余海杂波基本被剔除,目标基本被全部保留下来。
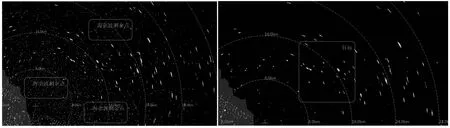
图7 时域维处理前后对比图
3 试验验证
为了验证本文所述方法在实际对海小目标检测的有效性。在3级海况条件下,一艘RCS约为1.0左右的小艇以5的速度从3 km处往外航行,如图8所示,可以看出,近程海杂波基本被完全抑制,极大降低了近程的点迹密度,提高了目标在杂波中的可见度。

图8 海杂波抑制效果对比图
从图9中可以看出若采用传统信号处理方式,上述实验场景中的小艇发现概率不足20%,很难在强海杂波下发现目标并实现稳定跟踪,采用本文所述频率维和时域维联合检测的方法,小艇发现概率达到90%以上。
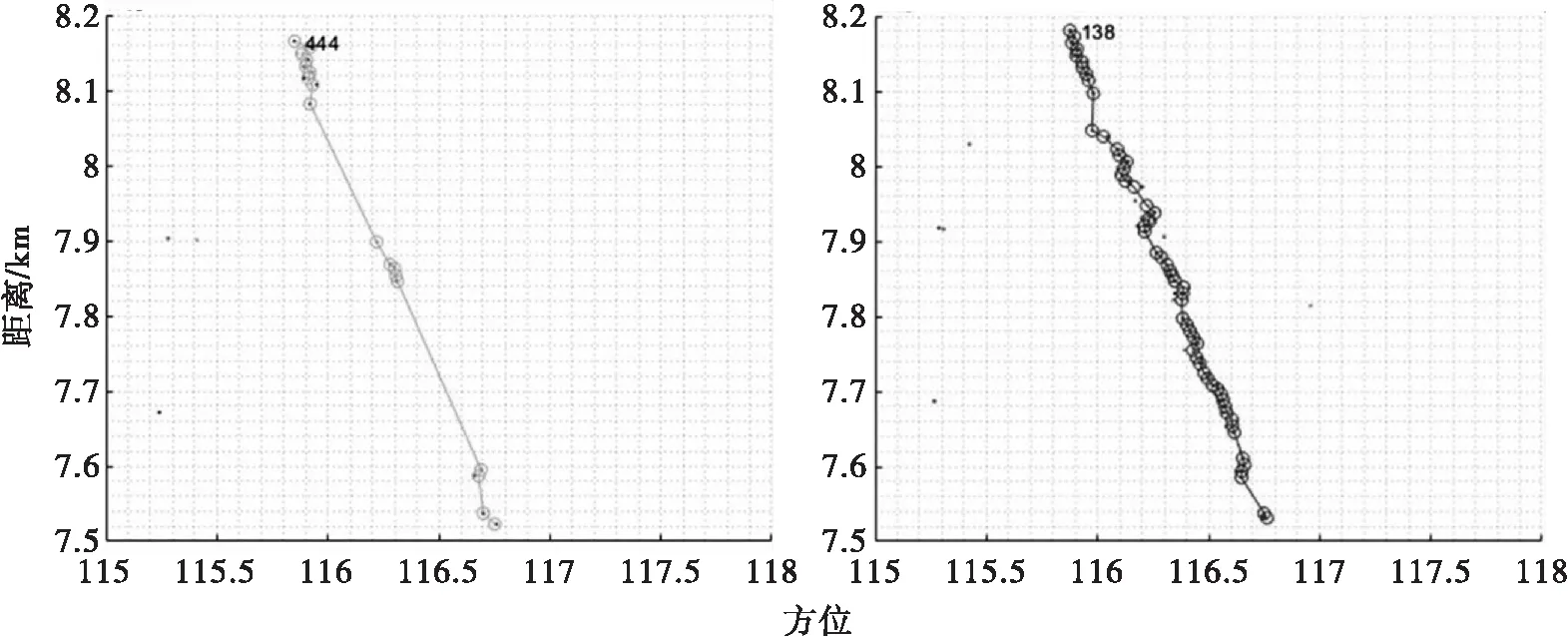
图9 目标跟踪效果对比图
4 结束语
本文针对海杂波环境下对海小目标探测问题,提出了一种基于频域维和时域维联合检测的方法,在频域维根据统计杂波中心频率和谱宽自适应选择MTD滤波器组,极大提高了目标在强海杂波下的可见度,同时联合时域维检测,根据目标回波的距离-方位特性,剔除CFAR之后的海杂波剩余。通过仿真以及外场实验充分验证了该方法的可行性和有效性,较好地解决了在强海杂波情况下小目标的探测问题。