基于空变运动补偿的斜视SAR成像技术
2022-10-12陆钱融王希冀马宪超于祥祯
陆钱融,王希冀,马宪超,杜 科,于祥祯
(上海无线电设备研究所,上海 201109)
0 引言
合成孔径雷达(synthetic aperture radar,SAR)是一种全天时、全天候的主动式成像雷达。SAR输出的高分辨率图像是精确制导、目标识别与解译以及环境监测等重要应用的基础。但由于气流扰动以及平台自身飞行的不平稳,机载和弹载SAR在回波数据采集过程中容易出现运动误差。会造成目标在距离压缩后出现位置偏移,而在方位压缩后出现主瓣展宽或者成对回波,甚至淹没在杂波之中。
针对运动误差,MOREIRA等提出在线性变标算法(chirp-scaling algorithm,CSA)中进行运动补偿,第一步运动补偿在方位向傅里叶变换前,第二步在距离徙动校正(range cell migration correction,RCMC)后,整个处理被称为“两步”运动补偿(two-step motion compensation,TSMOCO),该算法取得了非常瞩目的效果。但由于TS-MOCO忽略了运动误差的距离依赖性、孔径依赖性和沿迹飞行速度的变化,随着SAR分辨率的提升,其补偿性能逐渐恶化。为了解决方位向飞行速度不稳定带来的问题,FORNARO提出了方位向脉冲重采样方法。为了解决孔径依赖性,POTSIS等分别将目标在方位向的时域和频域回波进行分块并忽略子块内孔径误差,从而在一定程度上解决了孔径依赖问题。MACEDO等提出SAR复图像域的精确地貌和孔径依赖法(precise-tomography and aperture-dependent,PTA),通过假定线性多普勒频率-方位时间关系,将时域运动误差转换为多普勒域相位误差,分子块完成图像补偿。由于在复杂残余误差下,线性方位时频关系不再成立,因此PTA适用于微小运动误差补偿。国内在解决运动误差孔径依赖的问题方面也做了大量研究。ZHANG等提出了改进的时域分段运动补偿,不同于文献[7]中将子段内运动误差用时间中心处的值代替,而采用一次线性函数来拟合段内真实的运动误差,提升了补偿精度。ZHENG等提出采用标准频域分段(standard frequency division,SFD)补偿算法,根据方位频率和斜视角之间的关系,将每一个子孔径看成是估计斜视角处的回波进行方位向傅里叶变换得到的,实现时域一致补偿。针对距离依赖问题,CHEN等用频域Chirp-Z实现距离空变补偿;YANG等通过对距离压缩后的回波进行插值,采用一步补偿法校正距离空变包络。相比于文献[8]的算法,插值补偿的补偿精度几乎一致,但是会导致时间复杂度略高。
相比于正侧视SAR,斜视SAR具有更远的照射范围,同时方位与距离之间的耦合也更加严重。当存在运动误差时,其空变特性将导致无法精确修正成像相位补偿解析式。目前普遍采用后向散射(back-projection,BP)算法,在增加时间复杂度的条件下逐散射点完成聚焦。本文提出了一种基于线性变标(chirp scaling,CS)的距离空变运动误差补偿算法和一种基于精确频率分割(precise frequency division,PFD)的孔径空变补偿算法。对比传统算法,上述算法通过增加对运动误差引起位移中非线性项分量的考虑,提升距离向补偿的精度;同时,考虑残余孔径空变运动误差对方位频谱的影响,提出更精确的多普勒频率-瞬时斜视角表达式,以提高孔径空变运动误差补偿精度。
本文对运动误差空变性对SAR成像性能的影响机理进行分析,提出空变误差算法,并通过仿真验证算法的有效性。
1 问题描述
合成孔径雷达在场景回波数据采集时的雷达天线相位中心(antenna phase center,APC)与目标几何关系如图1所示。建立以方位零时刻为中心的坐标系oxyz,H为飞行高度,X为地距,θ(t)为瞬时斜视角;R为零多普勒面距离,R为斜距平面弹目理想距离,ΔR为由曲线轨迹引起的瞬时斜距误差,φ(R)为入射角;点p和点p分别为场景中任意目标和中心目标。
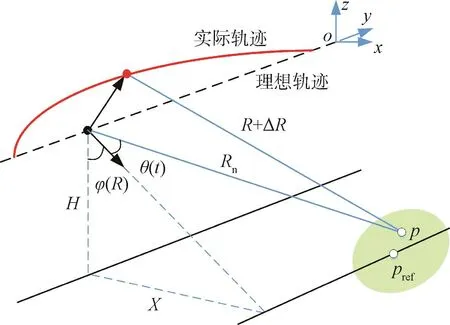
图1 雷达APC与目标的几何关系
雷达回波s′(t,τ)解析式为
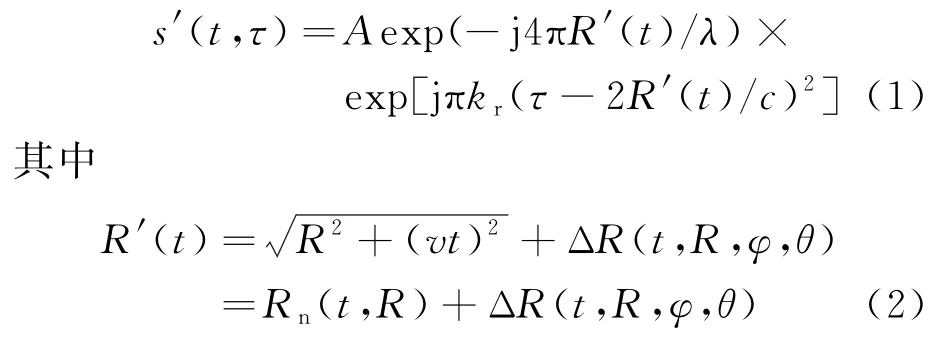
式中:t,τ分别表示慢时间和快时间;A为回波强度;R′(t)为真实的雷达天线相位中心与目标之间的瞬时斜距;λ为信号波长;k为调频斜率;c为电磁波波速;v为飞行速度。
用Δx,Δy,Δz分别表示x,y,z 3个方向上的运动误差,在TS-MOCO中,忽略斜视角θ和入射角φ,ΔR(t,R,φ,θ)可简化为
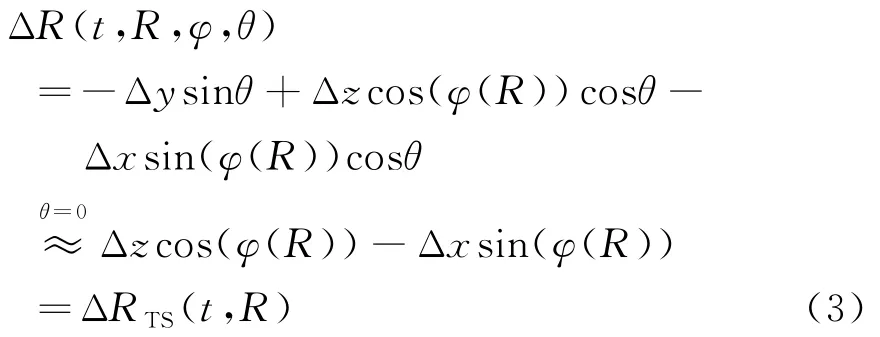
式中:ΔR(t,R)为TS-MOCO中斜距补偿量。
在TS-MOCO中,第一步采用ΔR(t,R)补偿距离非空变部分,其中R为参考距离(一般取场景中心);第二步在RCMC后执行,各个距离门处的补偿量Δr=ΔR(t,R)-ΔR(t,R)。但在斜视模式时,对于远离场景中心的目标,ΔR(t,R,φ,θ)与ΔR(t,R)的误差随斜视角增加而增加。
SAR斜视条件下,不同距离处目标运动误差空变性如图2所示。
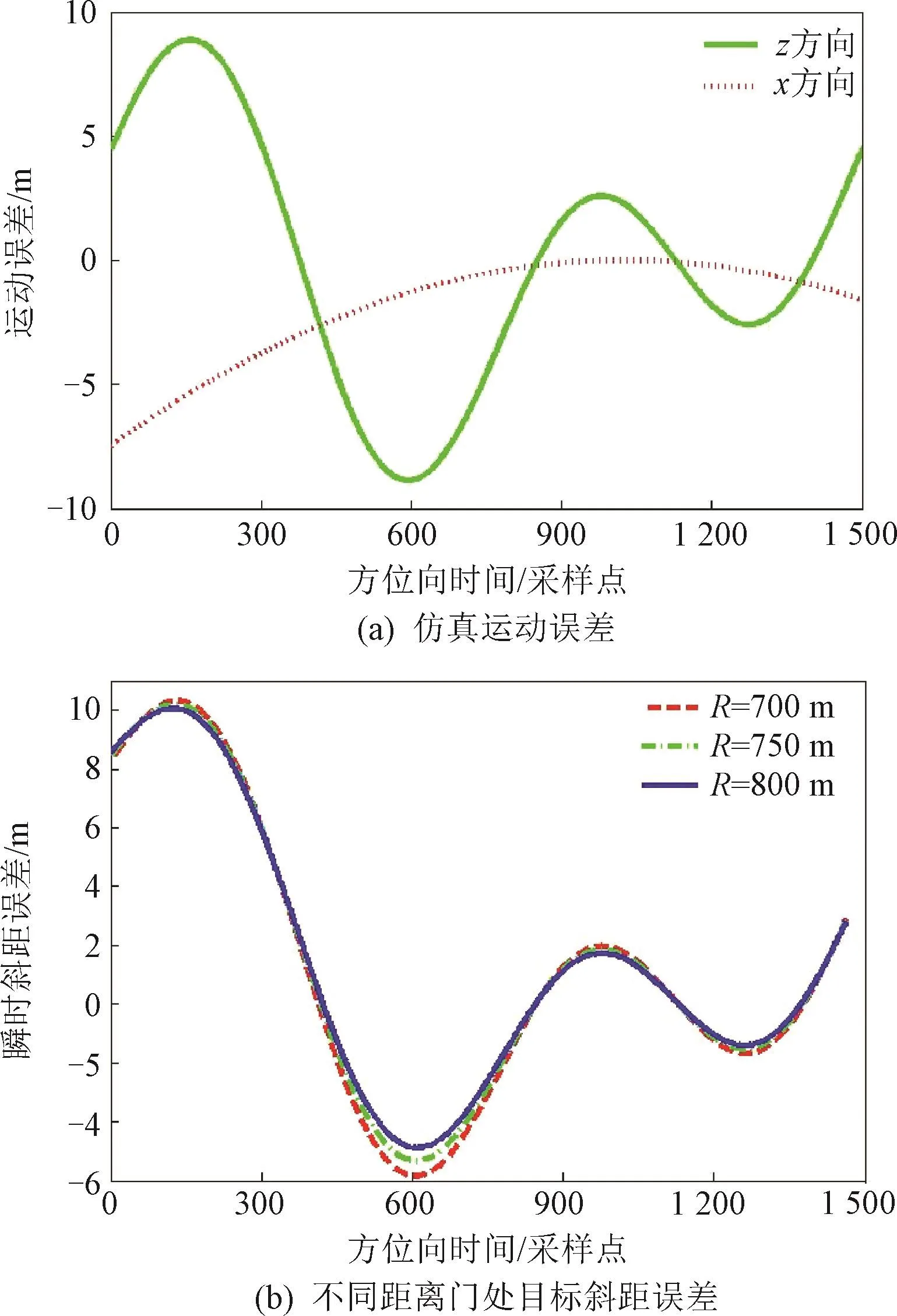
图2 不同距离处目标运动误差空变性示意图
当存在大量残余距离误差时,其多普勒谱出现混叠,即


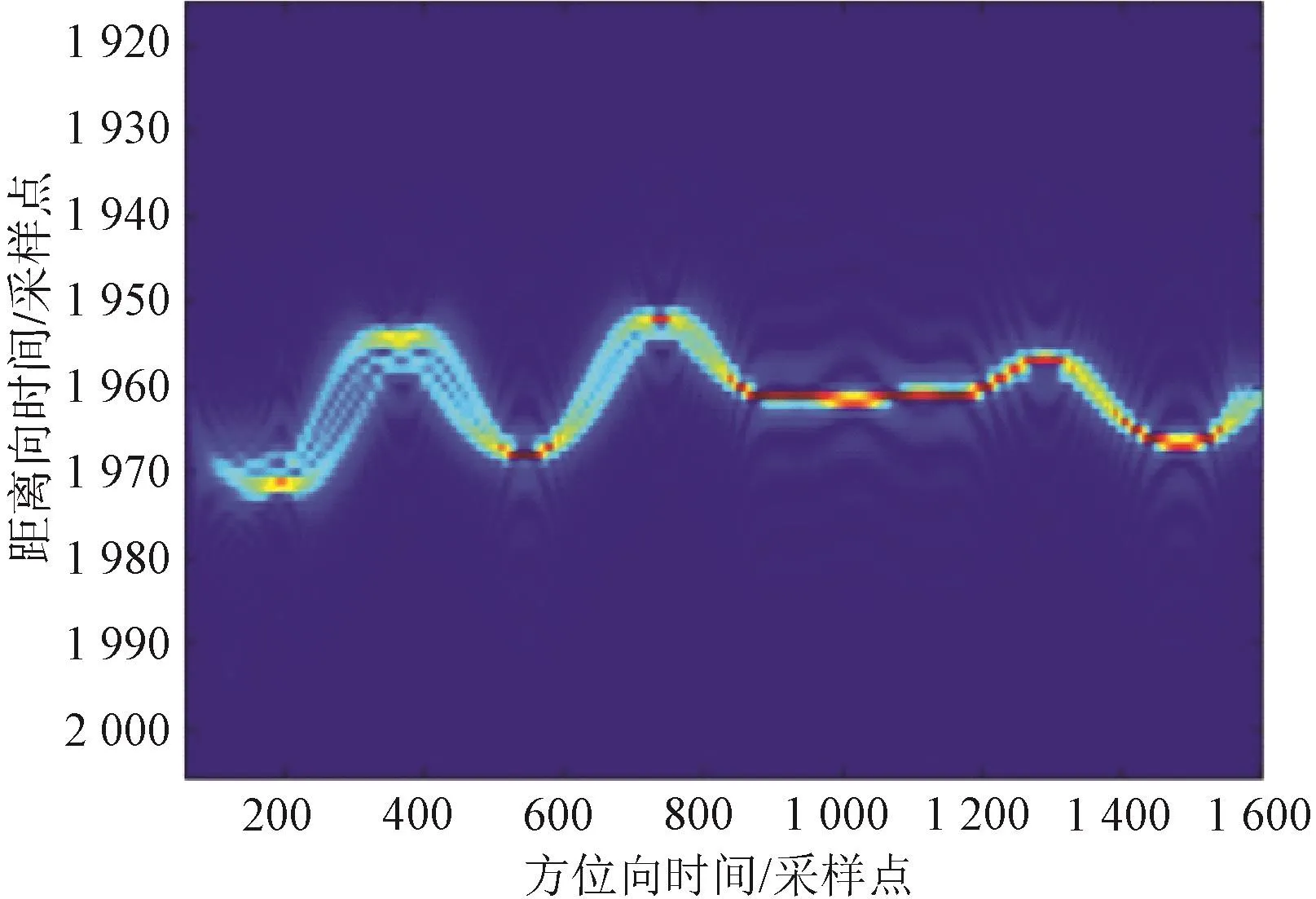
图3 残余运动误差对距离徙动校正的影响
2 斜视SAR空变补偿技术
2.1 距离徙动补偿
从统一运动补偿和成像处理出发,在对目标RCMC之前完成所有的空变补偿操作。假定目标位于远点,则斜距R′(t)的表达式可改写为
式中:θ是天线斜视角。为了降低该斜视角对频谱的影响,在距离频域实现多普勒中心置零,则距离频域补偿函数

式中:f为距离频率;f为载频。经过频谱搬移处理后,回看式(5),其方位等效速度变为v cosθ,记为v′。整个问题转化为正侧视下运动补偿和距离三阶展开下成像问题。
2.2 基于线性变标的距离空变补偿
针对距离空变问题,将距离误差改写为
式中:ΔR为总体运动误差;ΔR为距离非空变分量;ΔR为空变因子。很容易发现ΔR就是ΔR。
根据式(7),基于CS的距离空变补偿可以归纳为3个步骤。
步骤1,距离非空变向补偿。
距离非空变向补偿的实现与TS-MOCO完全一致,主要是构造距离频域补偿函数H(f),消除ΔR分量。H(f)的表达式为

步骤2,线性空变运动误差分量补偿。
为了消除空变线性误差分量,采样CS技术,设计变标函数

经过时域相乘后,回波信号距离向相位
式中:φ为CS处理引入的相位误差。
步骤3,方位向相位补偿。
经过步骤1,2的处理,所有的目标均已重排至理论位置。在此基础上,完成方位向相位补偿。进行距离向脉冲压缩,因经过CS,距离调频率已经改变,距离频率脉冲压缩滤波器函数

脉冲压缩后直接进行方位向相位补偿处理,相位补偿函数

2.3 基于精确频率分割的孔径空变补偿
经过2.2节的处理,完成距离空变部分的补偿。但正如引言中描述的,运动误差中还存在孔径空变部分,本节将解决这个问题。多普勒频率与瞬时斜视角之间的关系如图4所示。θ(t),θ(t),θ(t)分别为对应时刻的斜视角,f为子带中心频率。
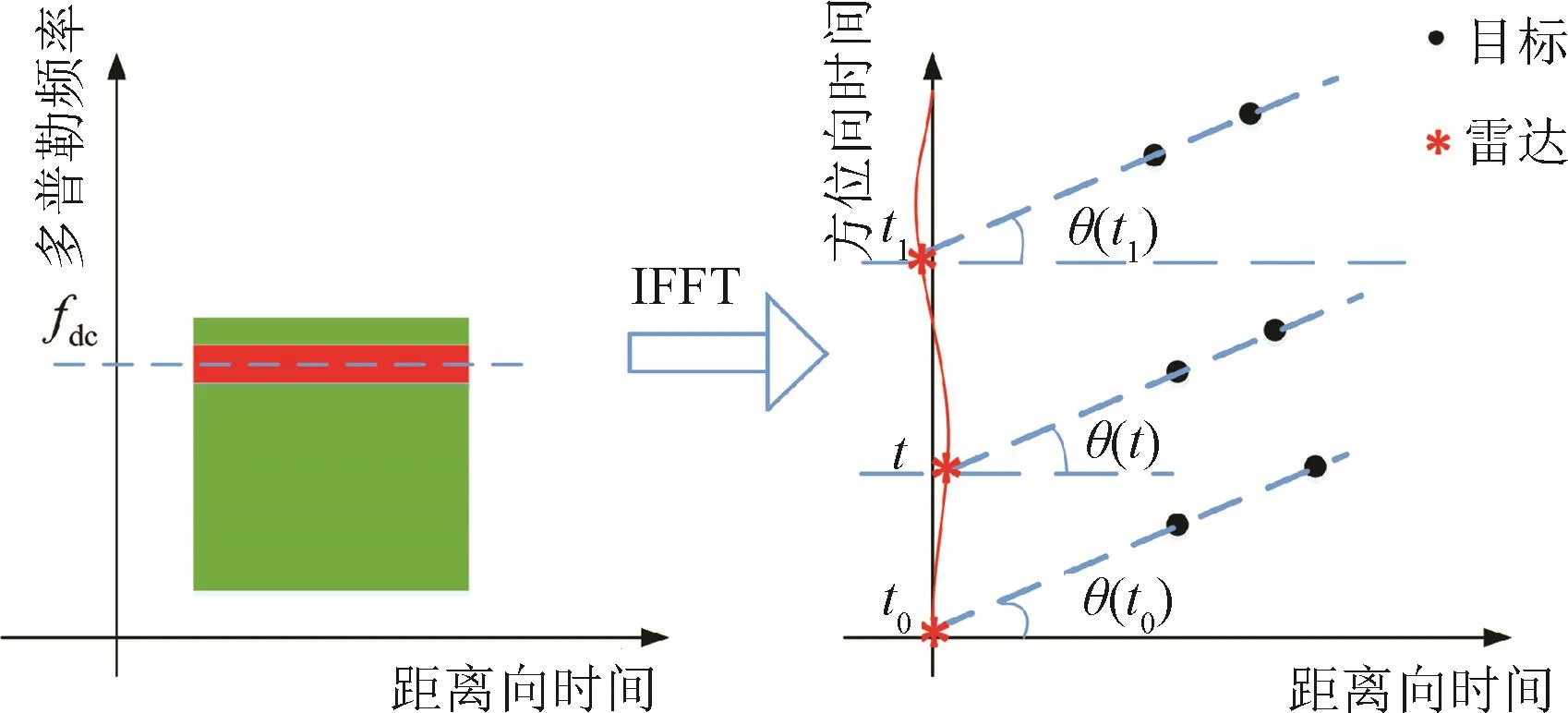
图4 多普勒频率与瞬时斜视角之间的关系示意图
由图4可知,在多普勒频域,子带中心频率为f且子孔径足够小,经过补零至方位向长度并作快速傅里叶逆变换(IFFT),由于残余误差对多普勒频率的影响,瞬时方位斜视角随时间可变。基于此,多普勒频率、残余孔径空变运动误差和瞬时斜视角之间的关系可表示为

式中:ΔR是残余孔径空变运动误差。结合式(5)和式(7),可得
式中:Δv和Δv分别是x轴和z轴向的速度误差。因为Δx<<R以及Δz<<R,化简式(15),得
式中:v为运动误差引起的速度误差。
求解式(16),可以得到
由式(5)、式(7)和式(18)可知,基于精确频率分割的孔径空变补偿主要包括频率子孔径划分、时域孔径空变误差分量补偿两个步骤。
步骤1,频率子孔径划分。
首先需要对多普勒频率进行分段,主要的原则是子孔径中心频率与边缘频率对应的孔径误差分量不大于λ/8,即
式中:ΔB为子带带宽。
求解式(20)可得

式中:f是脉冲重复频率。完成频率分段后,需要进行补零至方位向长度,再通过IFFT返回二维时域,准备相位补偿。
步骤2,时域孔径空变误差分量补偿。
当获取了待补偿的回波数据后,首先计算残余空变误差相位
基于式(22)、式(23),可得到在距离频率方位时域内的残余孔径空变误差补偿函数

经过上述步骤后,基本的运动误差都已被消除,接下来直接采用CSA获取最终SAR图像。
3 讨论

对比式(7)和式(25),可发现后者多了一个瞬时斜视角项cosθ(t)。为了评估两者差异,定义误差因子
式中:θ为天线波束宽度。
仔细观察发现,k(R,θ)表示波束中心和波束边缘处ΔR的差异。给定高度(H=5 000 m)情况下,k(R,θ)随目标距离和天线波束宽度变化的曲线如图5所示。可以看到,绝大多数情况下,不同距离门处,目标地距用场景中心地距近似所造成的影响是可以忽略的。
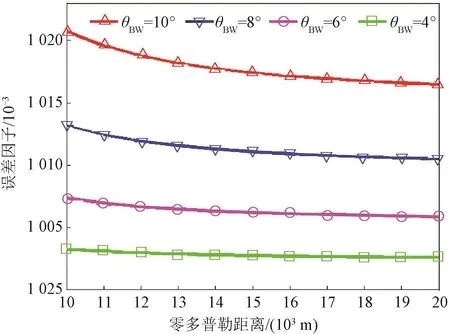
图5 误差因子随目标距离和天线波束宽度的变化趋势
此外,根据基于CS的距离包络校正流程,对于MN组回波数据,快速傅里叶变换(FFT)和IFFT
的复乘次数均为(MN log N)/2,H,H,H,H的复乘次数为MN,则基于CS的距离包络校正的总复乘次数
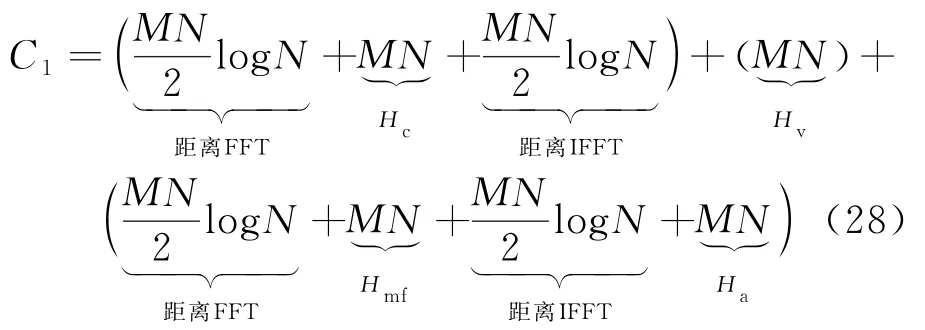
式(28)中的3项分别对应距离非空变向补偿、线性空变运动误差分量补偿、方位向相位补偿的计算量。
假设在PFD过程中共划分了L个子孔径,同理可计算其复乘次数
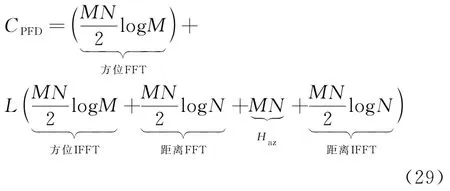
式(29)中的第二项对应时域孔径空变误差分量补偿的计算量。
4 仿真试验与结果分析
采用仿真数据验证本文的算法。为了突出运动误差的空变性,设距离向分辨率为0.1 m,雷达仿真参数如表1所示。
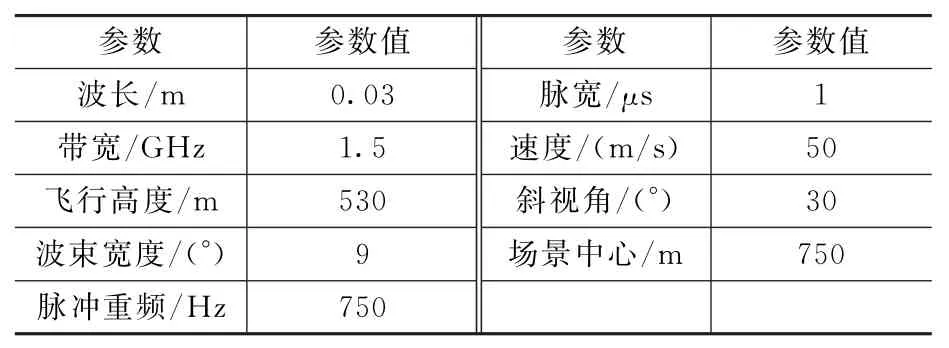
表1 雷达仿真参数
仿真的点目标分布和运动误差如图6所示。仿真试验场景中设置3个点目标T0,T1和T2,分别位于中距、近距和远距,且T0与T1,T2间距110 m,位于场景中心的点目标T0距雷达的斜距R=750 m,如图6(a)所示。运动误差在z向(垂直于地面方向)呈现高频抖动,在y向(径向)表现出大横向机动,如图6(b)所示。
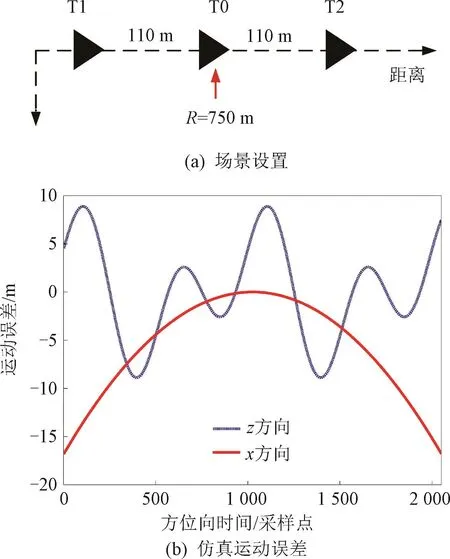
图6 仿真的点目标分布和运动误差
SAR图像大小设为2 048像素×4 096像素(方位×距离),首先通过去走动处理,将多普勒频带搬移至基带,其回波去走动处理前后结果如图7所示。
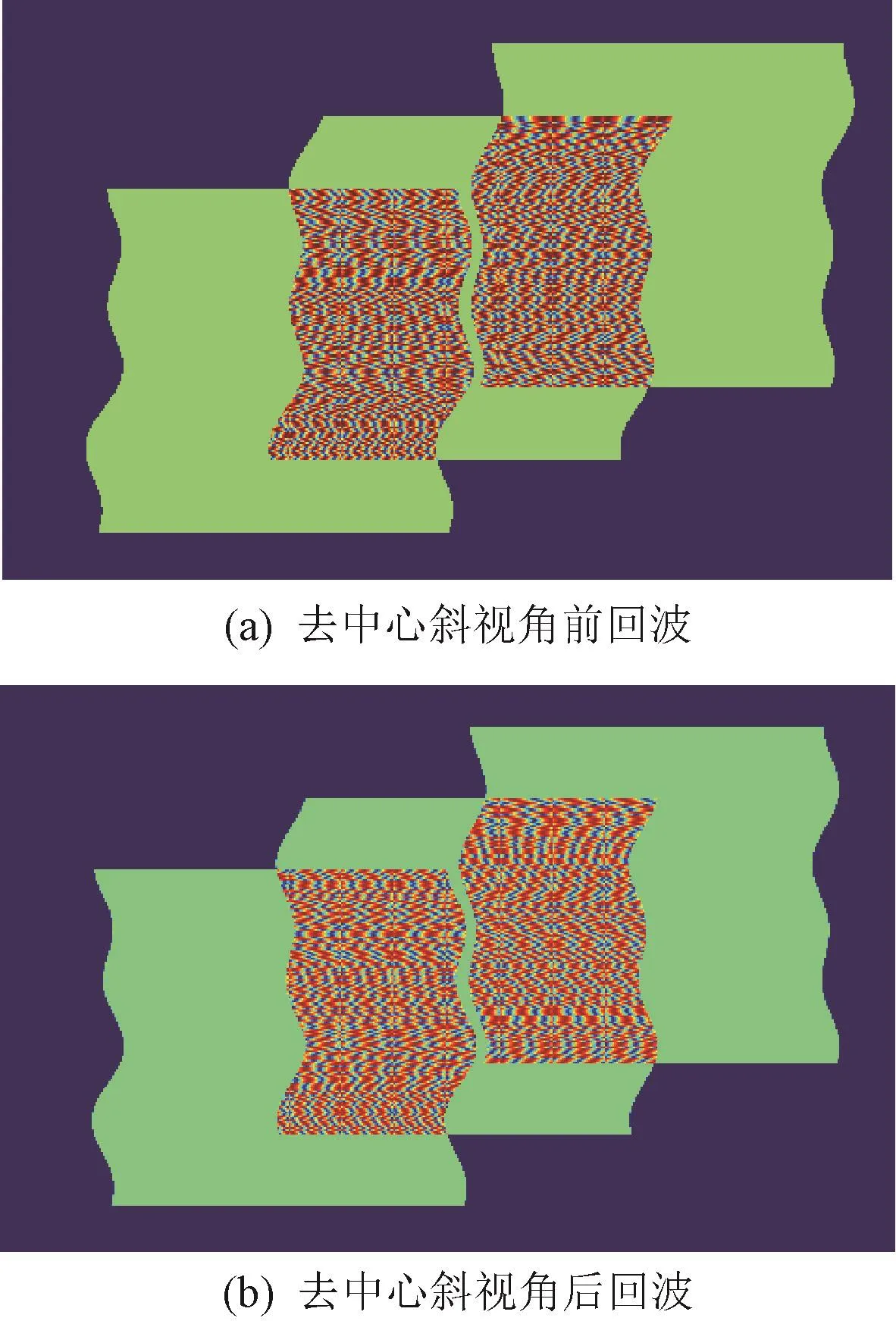
图7 回波去走动处理前后示意图
在去走动基础上,采用不同方法探索点目标的CS补偿效果,如图8所示。先用距离分块的策略进行距离向补偿,每一块的中心零斜距分别为612,762,910 m,对每一块进行TS-MOCO处理,得到的补偿结果如图8(a)所示。采用CS方法对整块数据进行距离空变补偿,3个目标的距离徙动补偿后曲线如图8(b)所示。由于T0,T1和T2均不在中心斜距处,所以存在较为明显的失真。对每块数据均进行CS补偿处理,参考距离设为场景中心处,其结果如图8(c)所示,可以看到大部分的徙动误差已经被校准。
图8 采用不同方法补偿后的点目标距离徙动曲线图
距离分块和CS补偿结合处理后3个目标的残余距离误差如图9所示,其最大的误差已经小于2个距离单元。由孔径空变性引起的这部分残余距离徙动(RCM)将由精确频率分割补偿。
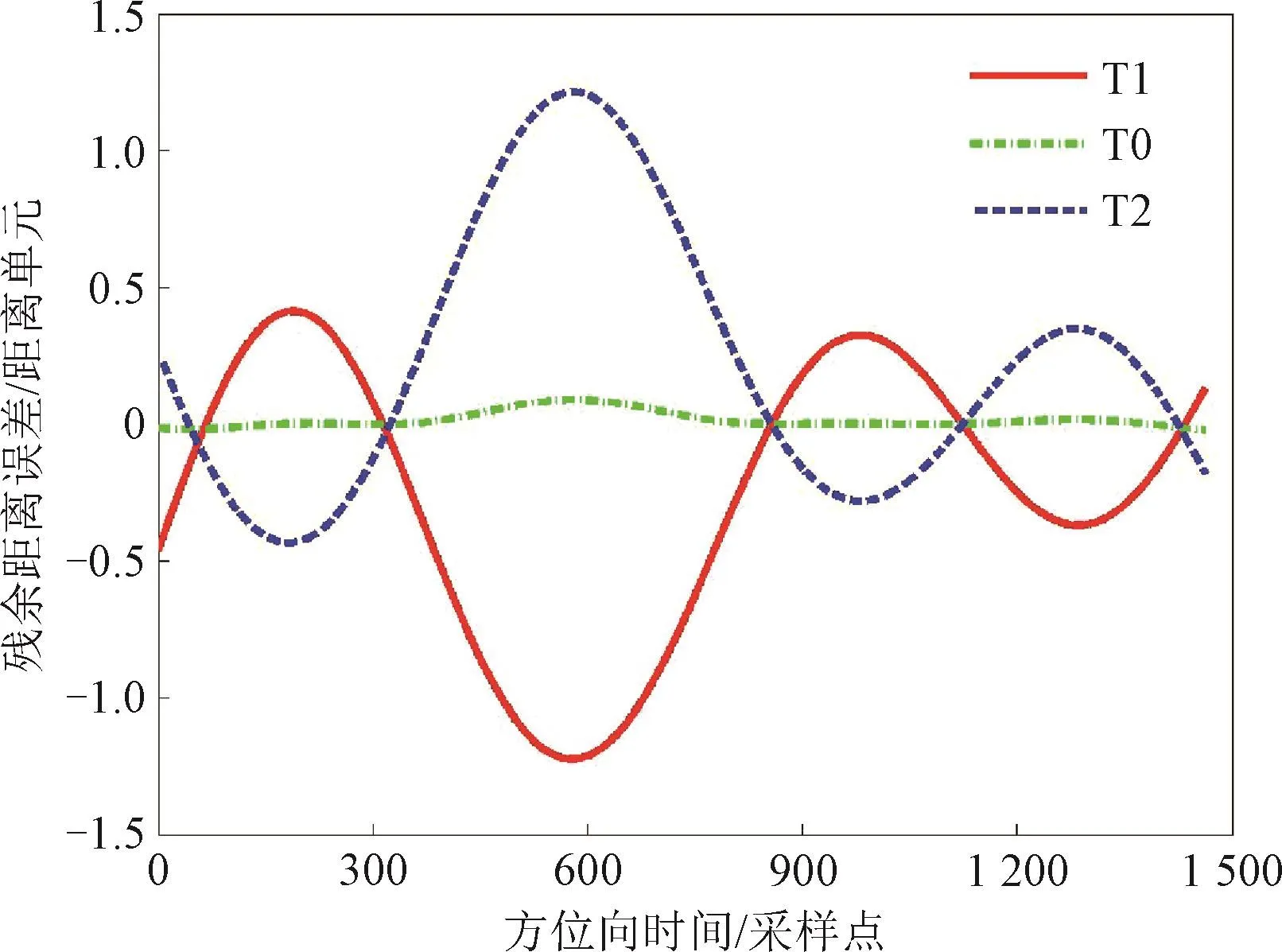
图9 经过距离分块和CS包络校正之后的残余距离误差
在完成包络校正的基础上,通过时域分割、SFD以及PFD来补偿上述的2个距离单元的孔径误差,用方位向时频曲线来衡量补偿精度,经过处理后目标方位时频曲线如图10所示。
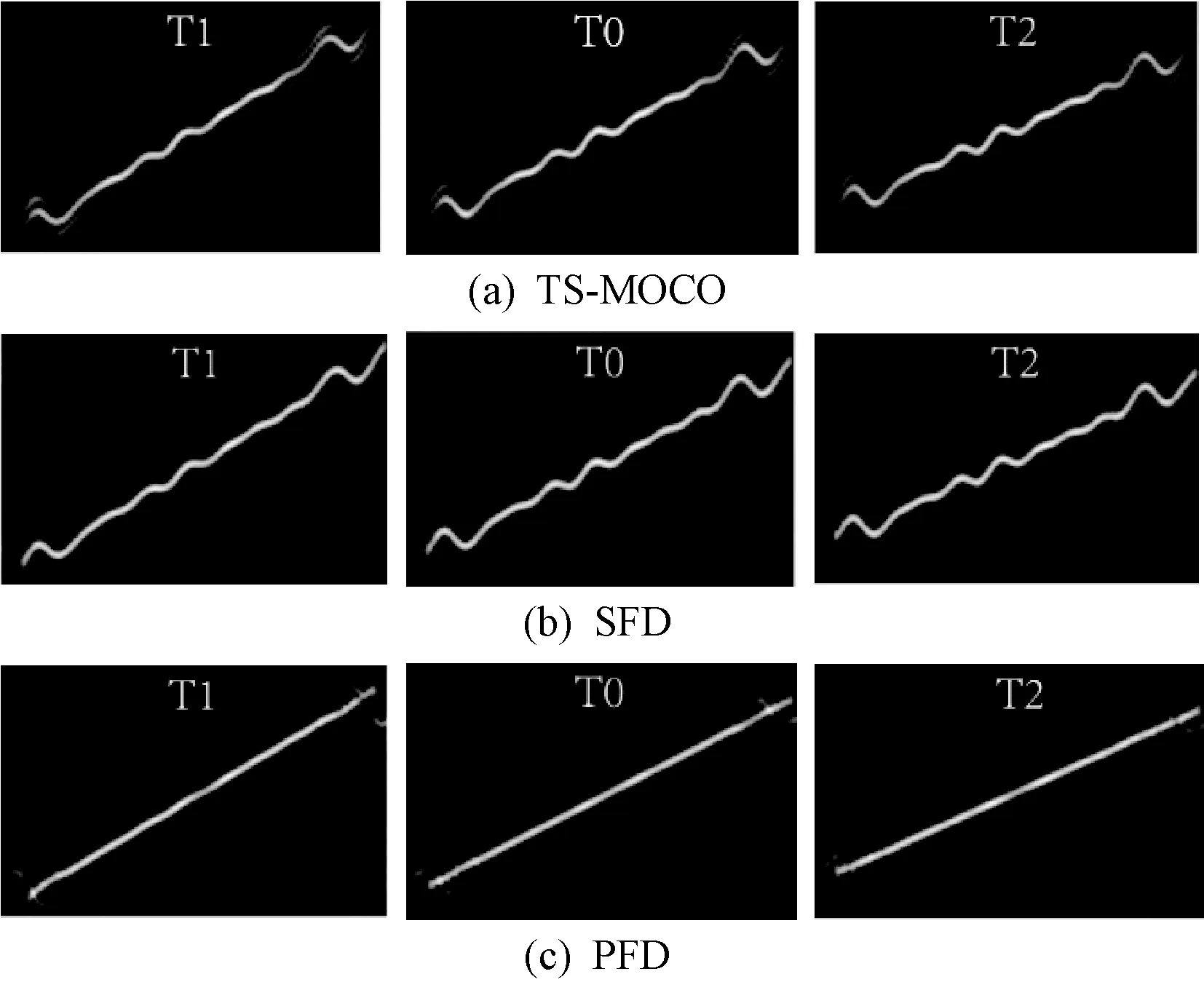
图10 经过处理后目标方位时频曲线
对于TS-MOCO,由于残余误差振荡情况比较复杂,因此每一个子块的方位时域长度设为20个采样点,其补偿结果如图10(a)所示。显然时域分割对孔径依赖误差的补偿非常有限。对于SFD,可以计算出3个距离块(从左至右)的要求的子频带宽度分别为14.1 Hz(38.5 点)、12.4 Hz(33.9点)和11.9 Hz(32.7点),由此设定SFD中子带的长度分别为35点、30点和30点。SFD的补偿效果如图10(b)所示。通过对比可以发现无论是TS-MOCO还是SFD,都无法完整地补偿孔径依赖误差。采用本文提出的精确频域分割方法进行补偿,其中子带划分的参数与SFD一致,处理结果如图10(c)所示。可知PFD对孔径依赖误差的补偿效果明显优于TS-MOCO和SFD。
非线性调频变标算法(non-linear chirp scale algorithm,NLCSA)是一种经典的处理斜视SAR回波数据的方法。在本次试验中,分别基于TS-MOCO+NLCSA的传统方法和本文提出的去走动+CS距离包络校正+PFD+CSA方法处理的SAR图像如图11所示。通过对比不同距离处目标的能量等高线,可以发现本文提出的方法具有更高的聚焦精度。

图11 传统方法和本文所提算法最终聚焦效果对比
4 结论
本文提出了一种基于线性调频的距离空变运动误差补偿算法和一种基于精确频率分割的孔径空变补偿算法。相比于传统算法,该算法增加了对运动误差中非线性项的考虑,提升了距离向补偿的精度。同时考虑到残余孔径空变运动误差对方位频谱的影响,提出了更精确的频率-斜视角表达式,提高了孔径精度,并通过仿真试验验证了本文算法的有效性。本文提出的运动补偿在传统SAR成像处理之前,因此可以在不修改传统成像算法的基础上与之结合,提高了算法泛化性,方便移植至弹载平台。