基于ABMS的对地攻击型无人机体系贡献率评估
2022-10-12刘文金裴扬葛玉雪艾俊强
刘文金,裴扬,2,葛玉雪,2,*,艾俊强
1. 西北工业大学 航空学院,西安 710072 2. 飞行器体系贡献度与综合设计工业和信息化部重点实验室,西安 710072 3. 中国航空工业集团公司 第一飞机设计研究院,西安 710089
对地攻击型无人机可执行战场侦察、防空压制、对地攻击等任务,具有成本低、零伤亡等优势,在现代战场中发挥着重要作用。为此,以往学者对无人机的作战效能评估开展了较多研究工作。而随着现代战争的体系化发展,以单一型号作战能力为核心的效能评估方法已无法满足体系作战需求,必须要从体系的角度出发结合具体的作战任务,评估其对体系的贡献率。因此,在效能评估的基础上,建立一种适用于对地攻击型无人机的体系贡献率评估方法具有重要意义。
在现有的体系贡献率评估方法中,主要有解析法和仿真法2种。解析法主要关注能力指标,受主观影响大且没有充分考虑具体作战任务中作战对手、作战环境、作战策略等因素的影响。而仿真方法受主观影响小,可对上述因素进行详细研究。其中,基于Agent的建模与仿真(Agent Based Modeling and Simulation, ABMS)方法可以有效描述作战实体的自主性、反应性、交互性等特性,通过自底向上的方式描述复杂系统的演化过程,在飞机作战效能评估和方案论证中已得到广泛应用。文献[6]使用ABMS分析飞机对综合防空系统进行突防并打击高价值目标的任务效能,以此为基础进行飞机参数的权衡设计。文献[7]将ABMS用于多无人机海域监视的任务效能分析。文献[8]将ABMS与复杂网络模型相结合,评估多无人机系统的指挥控制效能。文献[9]采用ABMS实现了使用机载激光武器在轰炸机突防任务中防御来袭导弹的动态过程的仿真并进行了效能分析。文献[10]采用条件-动作规则描述Agent行为,对无人机集群侦察和搜救任务进行了建模和仿真。文献[11-12]采用有限状态机描述Agent行为,研究无人机搜救、突防攻击等作战仿真。文献[13]使用ABMS进行战斗机突防作战效能仿真并开展指标论证研究。
以往学者使用ABMS方法开展的相关研究存在以下问题,首先在Agent行为机制方面,大都采用定制化的单一行为机制,缺乏通用性;其次,在Agent模型结构方面,大多采用模块化的构建方法,通过不同模块组合为不同的系统,但对无人机在体系对抗中的生存力考虑较少,而无人机的生存力直接决定了能否遂行既定的作战任务,进而影响体系作战效能;再次,在评估指标体系方面,以往研究大多从无人机本身的特性出发并以单一的作战结果作为评价标准,没有从作战体系的角度出发,无法充分反映无人机在体系中的定位及其在作战过程中发挥的具体作用。
针对上述问题,本文提出一种基于ABMS体系贡献率评估方法并对对地攻击型无人机进行体系贡献率评估。首先提出ABMS的体系贡献率评估框架,对评估过程进行分析;然后根据Agent的行为特性建立无人机Agent复合行为模型;通过分析无人机在作战过程承担的任务和无人机的基本特性,提出模块可组合的无人机Agent功能模型并对典型模块进行建模;从作战效果、效率和代价3个方面综合考虑,提出评价作战体系效能的指标并给出体系贡献率计算方法。
1 基于ABMS的体系贡献率评估框架
无人机作为一种典型的武器装备,其体系贡献率评估遵循一般武器装备的评估过程。采用ABMS方法对装备进行体系贡献率评估以任务需求为导向,将装备参数、装备编成等作战要素作为输入,然后进行建模与仿真,最后确定评估指标并进行计算和分析,其框架如图1所示,具体流程如下:
将待评装备的作战使命分解为具体的作战任务。
根据具体的作战任务,明确作战装备、作战流程、作战环境、作战目标等要素。
建立作战仿真模型,包括双方的Agent 模型集、Agent指令集、仿真环境、终止条件等要素。
确定待评装备的评估指标体系和体系贡献率率计算方法
进行仿真实验,对待评装备体系贡献率进行评估。
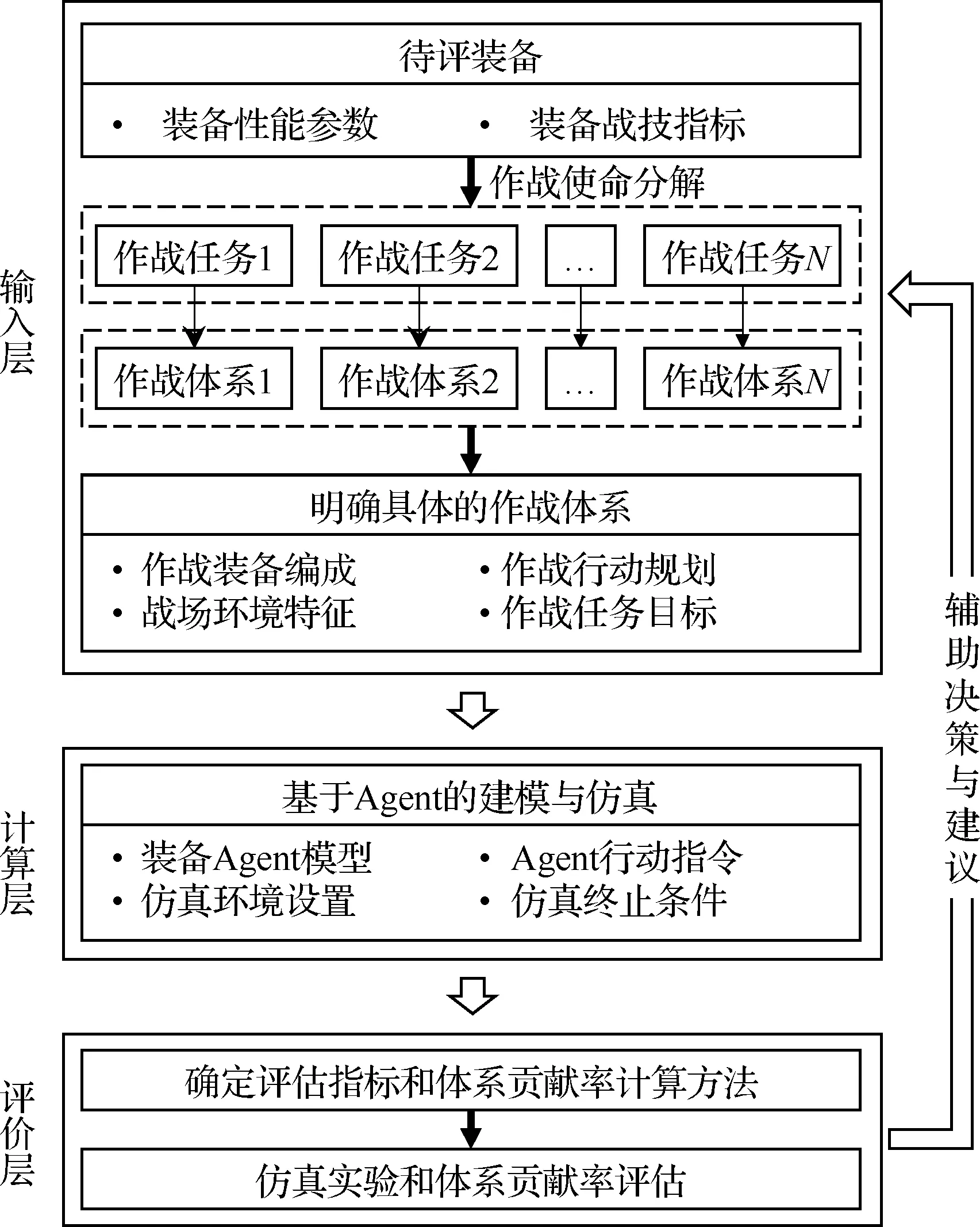
图1 评估框架Fig.1 Evaluation framework
2 Agent模型结构
2.1 Agent概念
Agent的概念源于分布式人工智能,已被广泛应用于体系作战建模与仿真中。Agent具有自主性、反应性、交互性等特点,可通过感知器获取环境信息及与其他智能体进行通信,可按照预定的规则或自主学习演化的规则进行特定行为,如图2所示。基于Agent的作战建模与仿真的核心思想是通过自底向上的建模,克服体系对抗这类复杂系统中难以分析的非线性、涌现性、交互性等特点、对现实中的作战过程进行有效描述。
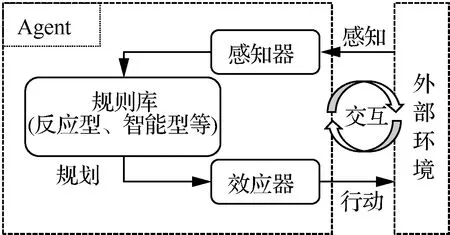
图2 Agent概念模型Fig.2 Conceptual model of Agent
2.2 Agent模型框架
基于ABMS方法的核心是对Agent模型的构建,Agent模型是装备实体在仿真环境中的模拟,要反映装备的物理特性、功能特性和行为特性等。在体系作战仿真中,Agent模型还应体现其在作战体系中如何发挥作用。为此本文提出从行为层、功能层、参数层3个层次构建分层模块化Agent模型,如图3所示。其中参数层为功能层中各种任务功能和基础功能的实现提供支持,功能层为行为层的各种行为的实现提供支持。分层模块化Agent模型的参数层包含Agent本体的所有参数和获取的外界参数信息。功能层包含运动模块、通信模块、生存力模块组成的基本功能模型和侦察模块、决策模块、攻击模块组成的任务功能模型。行为层以对外界环境的感知、规划、行动构成的循环过程作为总体的运行逻辑。

图3 Agent模型框架Fig.3 Framework model of Agent
分层模块化Agent模型具有较强的通用性,可根据研究需要建立不同智能水平的行为模型,不同精细度的功能模型。
3 无人机Agent模型
建立无人机Agent的模型如图4所示,行为层使用有限状态机构建,功能层包含侦察模块、决策模块、攻击模块、运动模块、通信模块和生存力模块。
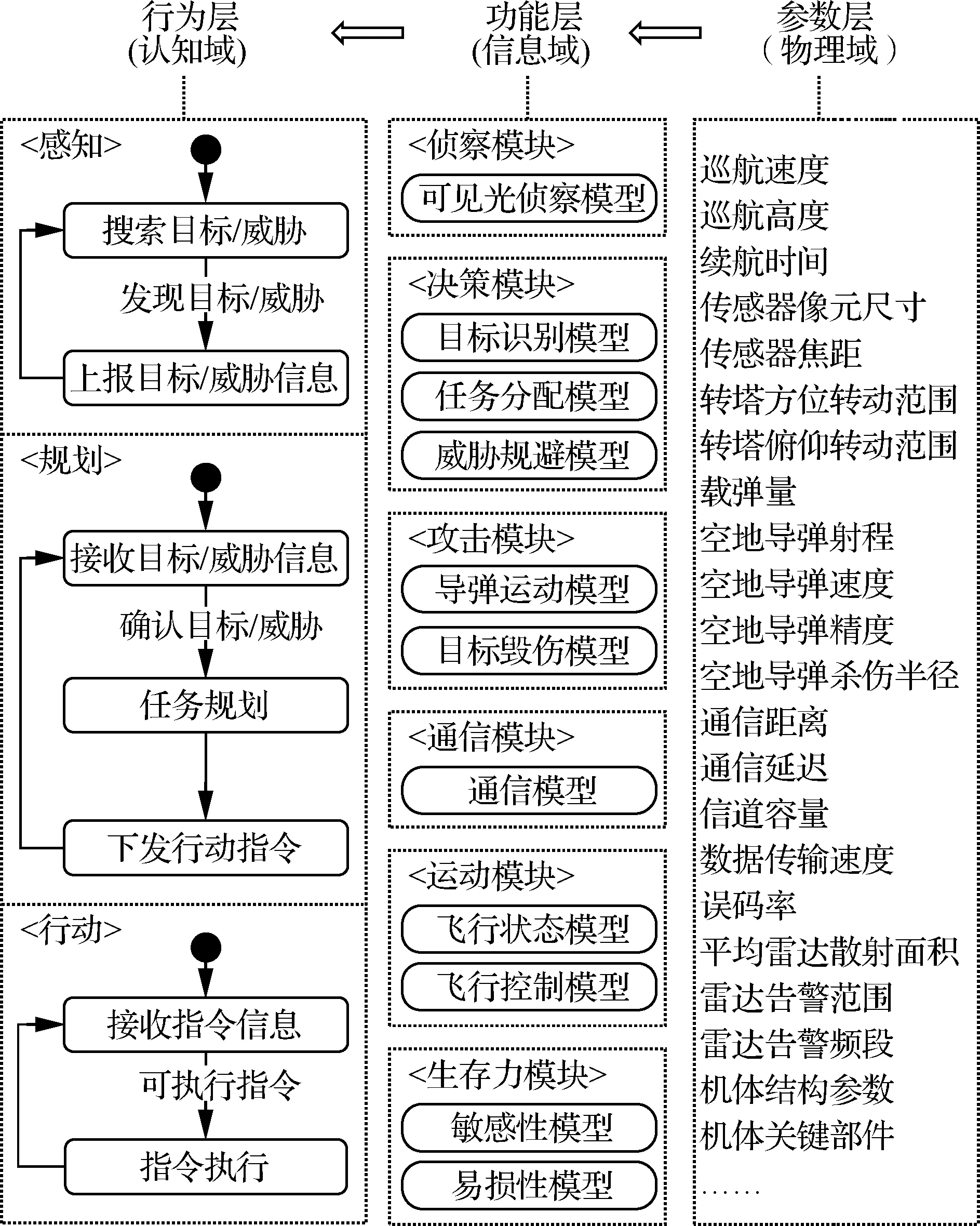
图4 无人机Agent模型结构Fig.4 Model structure of UCAV Agent
3.1 无人机Agent行为模型
任务开始时,无人机按初始任务规划前往任务区域,到达任务区域后,感知状态机开始工作,首先使用可见光侦察设备对防空系统进行搜索,使用雷达告警设备实时感知威胁,当发现敌方地面防空系统或感知到威胁时,向规划状态机上报目标或威胁信息。
规划状态机通过通信模型接收目标或威胁信息,通过目标识别模型确认目标后,进行任务规划,包括任务分配和路线规划,若确认为威胁则准备进行威胁规避,规划完成后形成行动指令通过通信模型下发给行动状态机。
行动状态机通过通信模型接收感知状态机下发的指令信息,若无人机遭受攻击,则通过易损性模型判断当前无人机Agent能否继续执行指令,若可执行则调用飞行控制模型按规划的航路进行运动,满足攻击条件时调用导弹模型对目标进行攻击,导弹命中目标后使用目标毁伤模型计算对目标的毁伤情况。
3.2 无人机Agent功能模型
无人机Agent功能模型主要对侦察、决策、攻击和生存力模块进行构建。运动和通信模块较为简单,其中无人机Agent的运动模块采用3自由度质点动力学模型进行构建,使用指令过载控制无人机Agent的运动;通信模块中无人机和地面站之间使用数据链进行通信,假设通信距离足够远,传输成功率为100%,带宽足够大,时延为零,不受干扰。通信模块包含发送信息和接收信息2部分功能。
3.2.1 无人机侦察模块
无人机侦察模块采用可见光侦察模型,可见光侦察模型对应于集成在光电吊舱上的可见光CCD相机。在搜索目标时,先采用宽视场进行大范围搜索,发现疑似目标时,调整焦距利用窄视场获取更高分辨率的目标信息。可见光传感器的视场(Field of View, FOV)范围通常用水平视场角和垂直视场角描述:
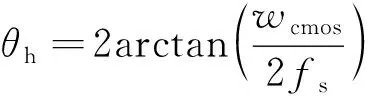
(1)
(2)
式中:为成像元件的宽度;为成像元件的高度;为焦距。
通常,传感器可通过光电转塔的方位转动和俯仰转动扩大侦察范围,侦察模块可观测到的范围称为观测场(Field of Regard, FOR),通常方位转动范围为×360°连续范围,因此本文假设侦察模块的观测场为一圆形范围,传感器以一定速率在圆形范围内覆盖扫描,当目标处于观测场范围内时,其信息将被传感器获取,如图5所示。

图5 无人机探测目标过程Fig.5 Process of UCAV detecting target
3.2.2 无人机决策模块
无人机决策模块包含目标识别、任务分配、威胁规避3个模型。
目标识别模型为通过目标影像信息判断是否为敌目标,在作战中对目标的确认过程一般如下,由无人机的传感器获取目标影像信息后,通过数据链传回地面站,再由无人机操作员和指挥官进行判断。对于人工目标识别,Johnson提出了估算目标识别概率的经验模型,即Johnson准则,该准则基于工程实践,其计算公式为

(3)
式中:为穿过目标特征尺寸的可分辨周期对数;为50%识别概率所需的可分辨周期对数,由表1给出。可由目标特征尺寸和传感器地面采样间距计算得出:
(4)
(5)

(6)
式中:为目标在传感器上的投影的特征尺寸;为传感器焦平面阵列分辨率;为真实目标的特征尺寸;为光学系统的焦距;为目标与光电传感器之间的距离;和分别为摄像机观测方向上目标宽度和高度。本文对目标的识别过程从目标进入传感器的最大观测范围开始,先计算“观测”等级的识别概率,当概率大于90%时进入下一等级,直到“确认”等级的识别概率大于90%时认为识别出目标。

表 1 对应不同识别等级的N50的经验值[16]
任务分配和威胁规避均采用确定性的决策方法,决策逻辑如图6所示。任务分配决策逻辑为:首先确认目标的信息,包括目标的类型、状态和坐标。不同的目标类型需要选择不同的打击武器,如反辐射导弹可以打击雷达目标,但通常不能用于打击地面装甲目标。目标状态包括未被攻击、正在被攻击、被摧毁3种状态。当目标处于未被攻击的状态时,判断本机是否有适用于打击该类型目标的武器,若是则建立攻击航线并给导弹装订发射参数。
图6 任务分配和威胁规避逻辑Fig.6 Logic of task assignment and threat evasion
威胁规避决策逻辑为:无人机在保证自身生存的前提下才能对敌方目标进行侦察打击,因此设置为优先规避威胁。收到威胁信息后,先确认威胁信息,包括威胁的距离、方位和速度,然后按无人机与来袭威胁的相对速度方向生成规避航向,无人机转向规避航向进行威胁规避。
3.2.3 无人机攻击模块
无人机使用的攻击武器为空对地导弹,采用质点运动模型,发射后按比例导引以一定速度向目标飞行,满足引信启动条件时起爆。考虑导弹的射程、飞行速度、圆概率误差(Circular Error Probability,CEP),对目标的杀伤半径4个因素。单发空地导弹对目标的杀伤概率为
=
(7)
式中:为空地导弹的命中概率;为空地导弹命中目标后对目标的毁伤概率。对于矩形目标,单发导弹的命中概率可由导弹的CEP计算得到:

(8)
=0849 3CEP
(9)
式中:、分别为矩形目标的边长。
空地导弹对某一类型目标的毁伤概率计算较为复杂,可通过毁伤试验、建立目标易损性模型进行毁伤仿真等方法得到精确的毁伤概率表,本文用杀伤半径计算对目标的毁伤概率:
(10)
式中:为命中点与目标的距离;为空地导弹对该目标的杀伤半径。
3.2.4 无人机生存力模块
无人机生存力模块包含易损性模型和敏感性模型2部分。
易损性是指无人机不能承受损伤机理一次或多次打击的程度,是指在被敌方火力击中时倾向于严重损失和毁坏的程度,通常用无人机被威胁命中后损伤的概率表征。易损性与无人机的外形、系统和结构参数,不同杀伤等级下的损伤模式等多重因素有关,本文直接给出地空导弹对此无人机的毁伤概率。
敏感性是指无人机被威胁命中的可能性,通常用无人机被威胁机理命中的概率表征。无人机的敏感性与多重因素相关,可表示为
=
(11)
式中:为无人机被防空系统探测的概率;为无人机被防空系统识别、跟踪及瞄准的概率;为防空系统中装备的地空导弹成功发射的概率;为地空导弹发射后命中飞机或战斗部在飞机附近爆炸后杀伤机理命中飞机的概率。本文假设和的值均为1,只考虑飞机的雷达隐身性能即雷达散射截面积(Radar Cross Section, RCS)水平对的影响,以及机载雷达告警设备和无人机运动对的影响,其中雷达告警接收机的频段覆盖防空体系雷达信号频段且具备全向告警能力。
4 防空系统Agent模型
建立防空系统Agent的模型如图7所示,模型分为行为层、功能层和物理层。行为层的行为逻辑与无人机Agent相同,功能层包含侦察、决策、攻击、通信、生存力模块。
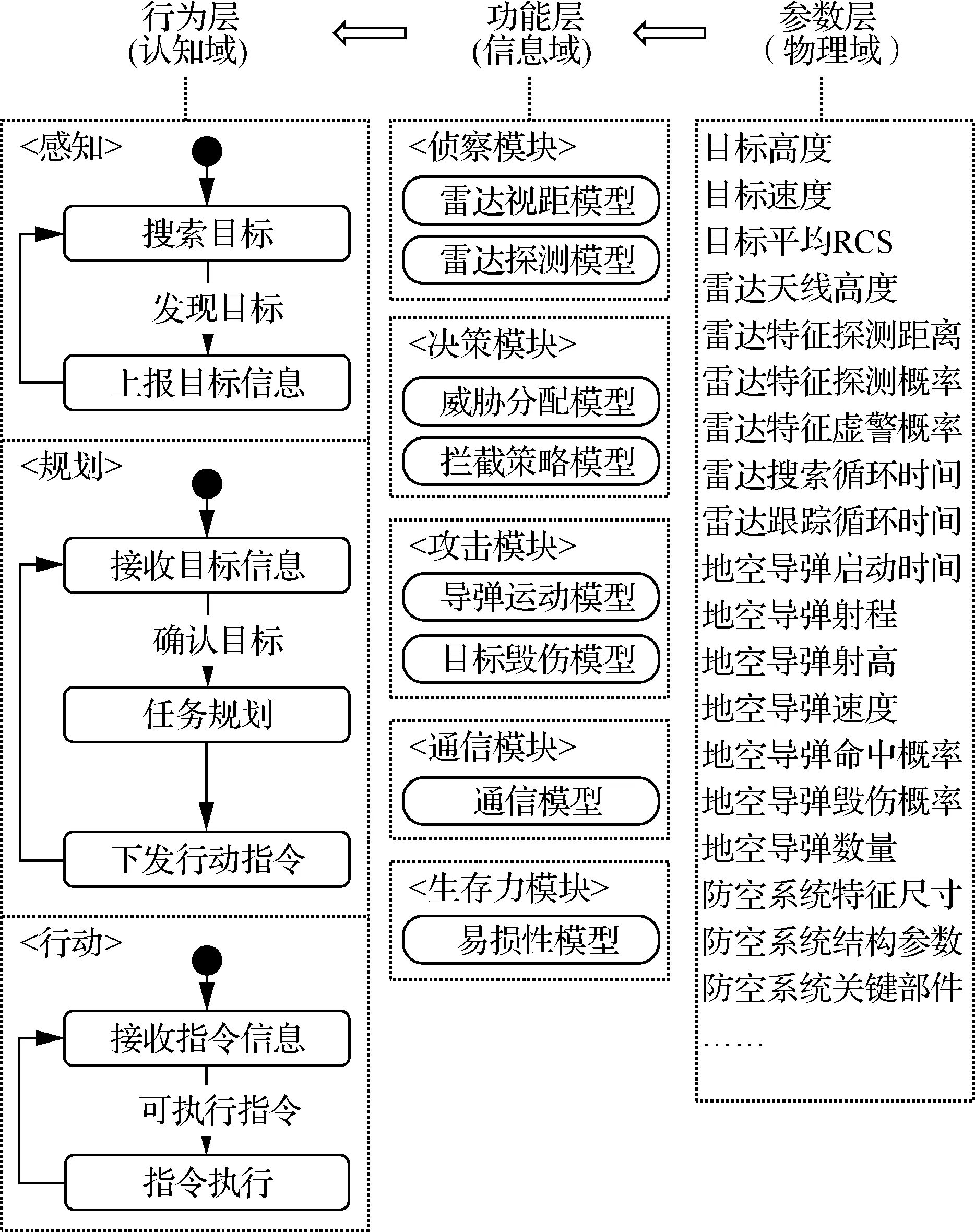
图7 防空系统Agent模型结构Fig.7 Model structure of ADS(Air Defense System) Agent
4.1 防空系统Agent行为模型
任务开始时,感知状态机开始工作,首先通过雷达视距模型判断目标是否在雷达视距范围内,若在视距范围内则使用雷达探测模型计算对目标的检测概率,当检测概率大于90%时则探测到目标,当连续5次检测中有3次检测到目标时认为雷达成功捕获目标,此时将目标信息上报给规划状态机。
规划状态机通过通信模型接收目标信息,通过敌我识别模型确认目标后,进行拦截任务规划,包括对威胁进行拦截的任务分配和拦截策略的制定,规划完成后形成行动指令通过通信模型下发给行动状态机。
行动状态机通过通信模型接收感知状态机下发的指令信息,若当前防空系统Agent遭受了空地导弹攻击,则通过易损性模型判断当前防空系统Agent能否继续执行指令,若可执行则判断是否满足导弹发射条件,满足发射条件时则发射地空导弹对目标进行攻击,调用地空导弹导引和运动模型对飞行过程进行仿真,当导弹命中无人机目标后使用目标毁伤模型计算对目标的毁伤情况。
4.2 防空系统Agent功能模型
由于防空系统的位置固定,不再建立运动模型,其通信、攻击、生存力模型的建模方法与无人机对应的模型相似,不再赘述。建立防空系统的侦察和决策模块的模型如下。
4.2.1 防空系统侦察模块
防空系统侦察模块使用雷达视距模型和雷达探测概率模型。
由于地球曲率的存在,当目标处于雷达视距内时,目标才可被雷达探测到。雷达视距的计算公式为

(12)
式中:为防空系统雷达高度,为目标高度。
雷达探测模型中采用单元平均恒虚警(Cell Averaging Constant False Alarm Rate, CA-CFAR)处理方式计算雷达探测概率,雷达探测概率是信噪比(Singal Noise Ratio,SNR)和虚警概率的函数。对于确定的雷达系统,在只有目标的RCS和距离参数发生变化,其余参数都不变的情况下,其对RCS为、距离为的目标探测的信噪比为SNR,则其对RCS为、距离为的目标探测的信噪比SNR为
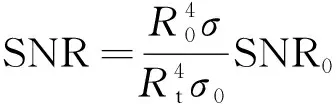
(13)
无干扰时,雷达对目标的探测概率为
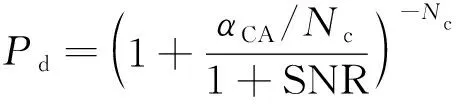
(14)

(15)
式中:为恒虚警处理常数;为参考单元个数;为虚警概率。
4.2.2 防空系统决策模块
防空系统决策模块包括威胁分配模型和拦截策略模型,均采用确定性决策逻辑,如图8所示。首先确认目标信息,包括目标距离、方位、速度,然后根据目标的距离进行排序,距离近的目标优先级高。排序完成后检测拦截武器数量,若仍有拦截武器,则装订拦截武器发射参数。
拦截策略采用一对一“拦截-评估-拦截”的策略,即首先发射一枚导弹进行拦截,若导弹成功摧毁无人机,则拦截结束;若未能摧毁无人机,则再次发射一枚导弹进行拦截直到无人机被摧毁。
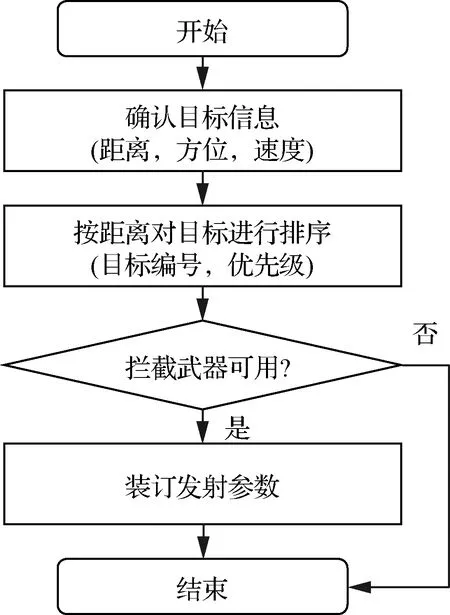
图8 威胁分配逻辑Fig.8 Logic of threat assignment
5 体系贡献率评估
5.1 体系效能评估指标
本文分别从作战过程和作战结果的角度提出作战体系效能评估指标.从作战过程的角度,在体系对抗过程中,根据“快速OODA(Observe、Orient、Decide、Act)循环”的思想,更快地完成“观察-判断-决策-行动”过程,并通过毁伤、干扰、欺骗等手段延缓敌方的OODA循环可以有效增加我方的作战优势,提高作战效能。从作战结果的角度,能否及时侦察到敌方目标并对其进行有效的打击和毁伤是衡量我方作战体系效能的根本依据。同时,作战双方的武器装备是有限的,我方在打击敌方目标时应尽量减少我方的武器资源消耗。因此,本文的体系效能评估指标主要考虑3点因素:作战效果、作战效率和作战代价,具体指标如图9所示。

图9 效能指标Fig.9 Effectiveness index
作战效果用目标摧毁率来衡量,即作战结束时摧毁的目标数量与目标初始数量的比值,进攻方的目标摧毁率可表述为
(16)
式中:为防御方初始时装备总数量;为作战结束时防御方的装备总数量。
作战效率用摧毁目标平均效率来衡量,即完成对目标的侦察、决策、攻击、摧毁这一过程的耗时情况,进攻方的摧毁目标平均效率可表述为
=××
(17)
式中:为侦察过程效率值;为决策过程效率值;为打击过程效率值。每个过程的效率值可用绝对或相对计算方法得到,绝对效率值可表述为
(18)
式中:为专家评定的每个作战过程的标准耗时;为每个作战过程的实际耗时。相对效率值可通过设置不同实验点,多次仿真获取不同作战参数下的作战过程耗时情况后,采用极差归一化方法获得。由于耗时为成本型指标,故相对效率值可表述为

(19)

作战代价用任务生存率来衡量,即作战结束时装备存活数量与投入作战的装备总数量的比值,进攻方的任务生存率可表述为
(20)
式中:为进攻方初始时装备总数量;为作战结束时进攻方的装备剩余数量。
作战体系效能为上述3个指标的聚合值,计算方法为
(21)
5.2 体系贡献率计算方法
对于武器装备的体系贡献率计算,一般采用在作战体系中增加待评装备,或用待评装备替换同类装备前后比较作战体系效能差异的方法,按式(22)计算体系贡献率:
(22)
式中:为包含装备(或使用装备替换同类型装备)的作战体系效能值;′为不包含装备(或使用同类型装备)的体系作战效能值。
6 实例分析
为验证本文方法的合理性和有效性,本节以对地攻击型无人机组成的作战体系执行对地侦察和打击任务为例,评估该作战任务下高隐身性和高速度机型的体系贡献率,作战场景如图10所示。作战过程为,无人机编队从基地起飞,沿突防路线前往任务区域,到达任务区域后,将任务区域按面积平均分配给单架无人机,无人机按扫描法进行航路规划,执行预定的侦察和对地攻击任务。在任务区域内随机位置设置防空系统,防空系统可对防区内的无人机进行拦截。当无人机被全部摧毁、敌方目标被全部摧毁、无人机完成区域搜索3个条件中任意一个达成时任务结束。
图10 无人机空地作战场景Fig.10 UAV air-to-ground mission scenario
本文使用Anylogic开发平台进行对地攻击型无人机空地作战的Agent仿真系统开发,仿真演示界面如图11所示,根据无人机Agent模型和防空系统Agent模型在开发平台中构建相应的Agent如图12和图13所示,其中行为层中的感知、规划、行动使用有限状态机搭建,功能层中的各个模块使用函数搭建。
图11 使用Anylogic建立的仿真界面Fig.11 Simulation interface with Anylogic
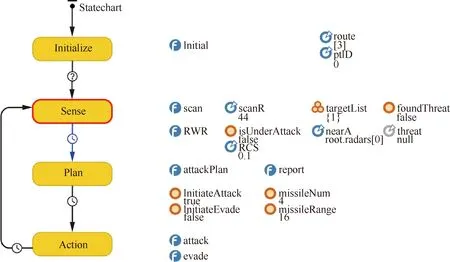
图12 无人机Agent模型Fig.12 UAV Agent model
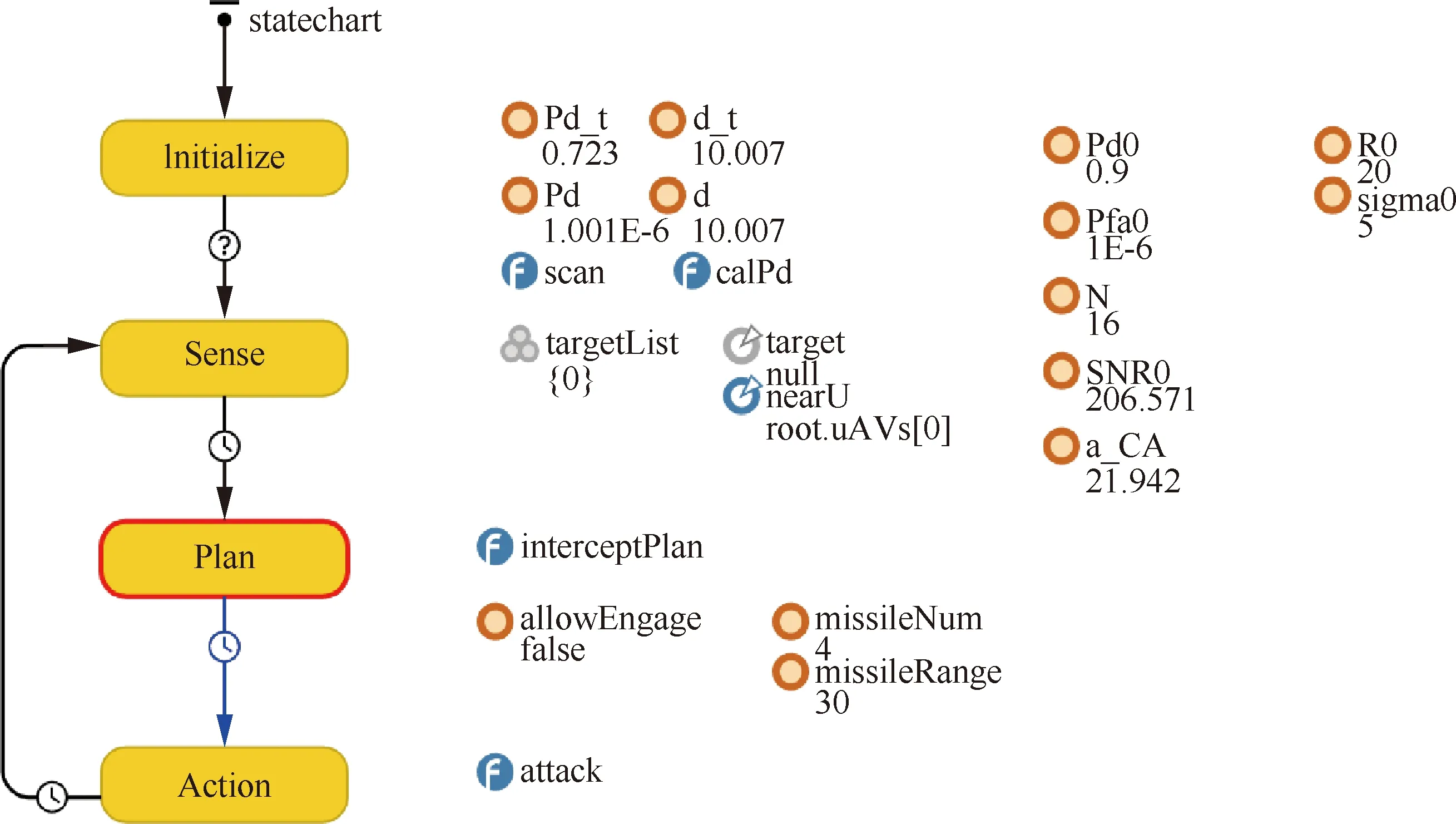
图13 防空系统Agent模型Fig.13 ADS Agent model
根据无人机空地作战场景和建立的无人机Agent模型以及防空系统Agent模型,设置仿真参数如表2所示。

表2 仿真参数
在上述仿真场景和参数设置下,为验证模型的合理性,以一架无人机进行对地搜索和打击作为基准场景,分析在作战体系加入1~8架同型无人机加入后的体系贡献率,无人机数量发生变化后,仍保持无人机按面积均分搜索任务区域、按扫描法进行航路规划等行动规划不变,每个实验点仿真200次,结果如图14所示。体系贡献率随新增无人机数量增加而近似线性增加,在加入4架无人机后接近饱和。体系贡献率的增加主要是加入更多无人机后,空地导弹总量增加引起的目标摧毁率增加和每架飞机搜索区域面积减少引起的摧毁目标平均效率增加,符合实际情况。
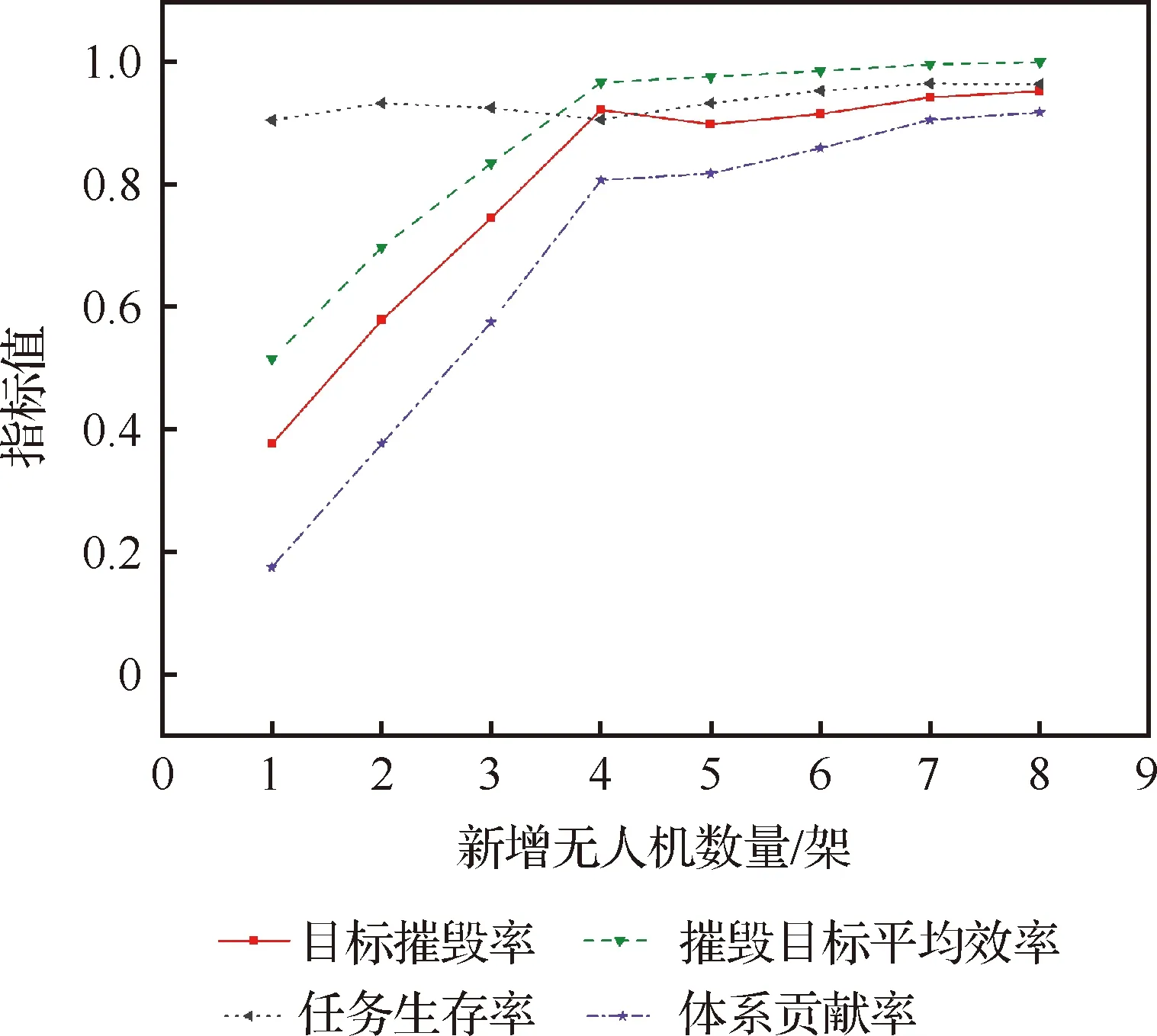
图14 不同机型数量的体系贡献率计算指标值Fig.14 Index value contribution of different number of aircraft in system of systems
为验证高隐身和高速度2类性能更强的新机型替换原有机型后的体系贡献率,以隐身指标和速度指标为变量,进行实验设计,总实验点数180个,每个点进行200次仿真,如表3示。
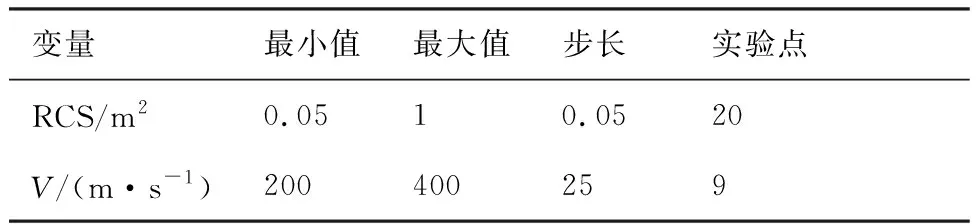
表3 实验设计
以基准机型的参数为标准,图15~图17分别为增加隐身性能和增加巡航速度后的新机型替换基准机型后,在其他条件不变的前提下,体系效能指标的变化曲线,图18为新机型的体系贡献率曲线。
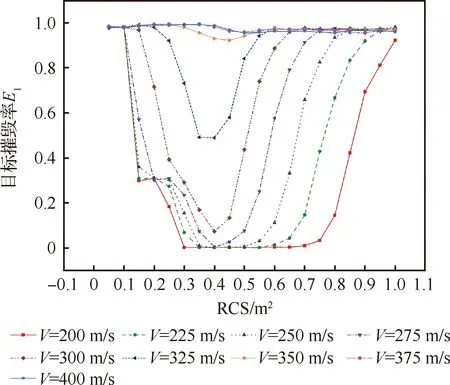
图15 目标摧毁率Fig.15 Targets destroyed rate
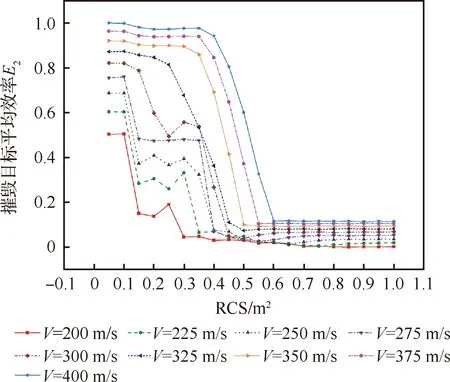
图16 摧毁目标平均效率Fig.16 Average efficiency of destroying targets
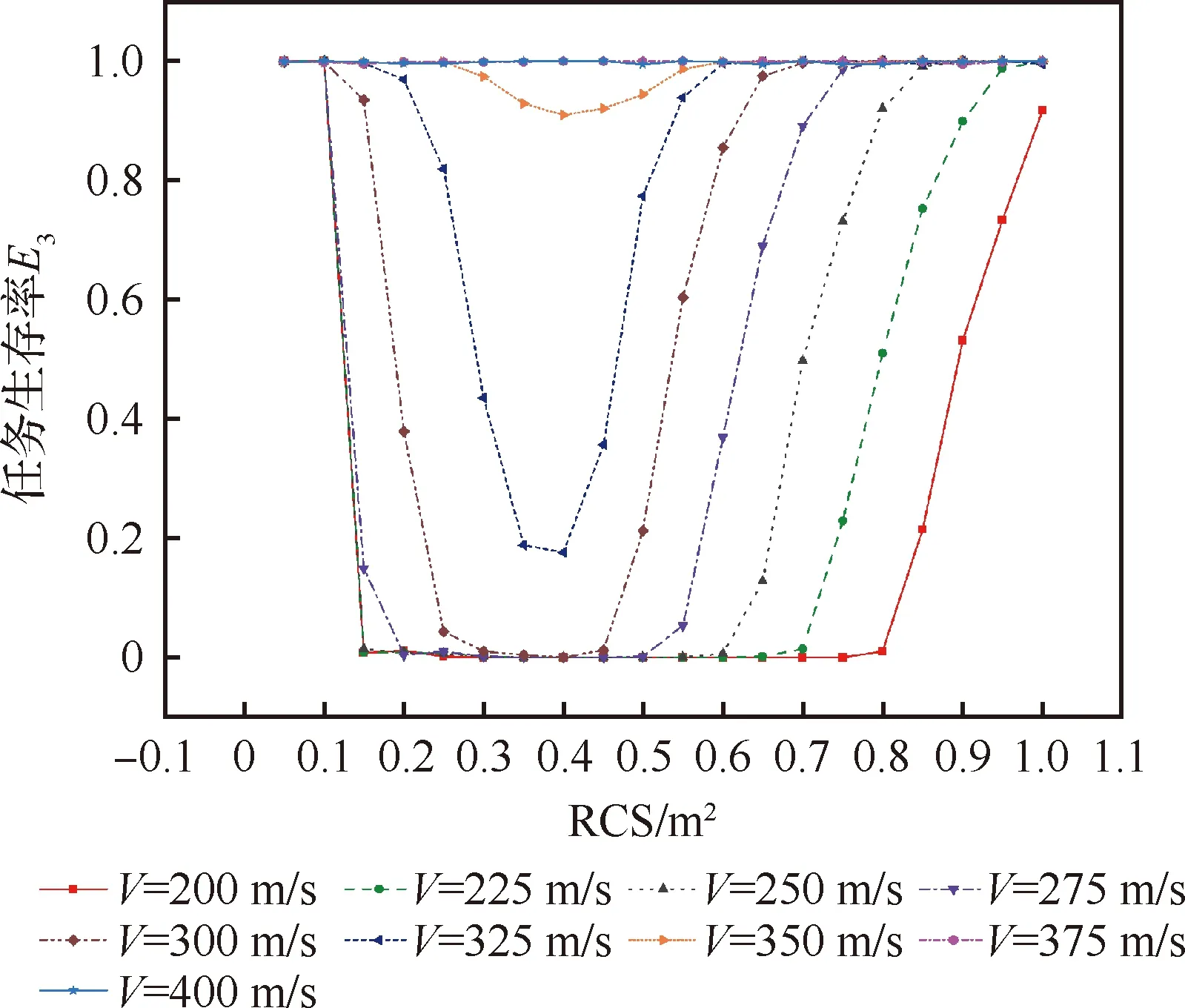
图17 任务生存率Fig.17 Mission survival rate

图18 新机型体系贡献率Fig.18 Contribution of new aircraft type in system of systems
从仿真结果可以看到,图15中目标摧毁率和图17中任务生存率2个指标在取定速度的条件下与RCS基本呈2种关系:在速度较低时先降后升,在速度较高时基本不变。
由于无人机决策逻辑为优先规避地空导弹,然后再对目标进行攻击,故在速度较低的情况下:无人机RCS较大时,防空系统能够及时发现无人机并发射导弹进行拦截,此时无人机刚进入防区,可快速脱离防区导致地空导弹拦截失败,无人机可再次进入防区并重复上述过程直至将防空系统装备的地空导弹耗尽,随后将目标摧毁,故呈现出任务生存率和目标摧毁率均较高的状态;随着RCS的减小,无人机不断压缩防空系统探测距离,防空系统探测到无人机时的两者距离较近,地空导弹发射后无人机逃离导弹攻击区的可能性不断降低,故呈现出任务生存率和目标摧毁率随RCS减小而降低的情况;当RCS进一步减小时,无人机继续压缩防空系统探测距离,可能无法被防空系统探测到或其被防空系统探测到时已满足空地导弹发射条件,无人机发射空地导弹后立即脱离,此时防空系统仍在进行发射准备,故目标摧毁率和任务生存率随RCS减小而增加。在速度较高的情况下:无人机在防空系统防区内任意位置感知到来袭导弹后均可成功脱离导弹攻击区,故目标摧毁率和任务生存率基本不变。
图16中摧毁目标平均效率指标在取定速度条件下随RCS减小基本呈单调增加关系。其原因在于RCS较大时,无人机易被防空系统发现且距离防空系统较远,侦察耗时长,同时需要先耗尽防空系统的地空导弹才能对目标进行打击,打击耗时长,总体效率低,而RCS较小时则与之相反。其中在无人机速度较小时,效率指标曲线中有一段随RCS的减小基本保持不变或略微降低,此情况为:RCS的减小使无人机更易发现防空系统,侦察耗时缩短,但同时无人机被防空系统发现时距离防空系统更近,逃脱地空导弹攻击区的耗时更长,无人机先规避威胁再进行攻击,故打击耗时增加。
图18中无人机的隐身指标和巡航速度变化均会对体系贡献率有较大影响,整体而言,高隐身性或高速度的机型通常会提高体系贡献率,该仿真实验结果与实际情况相符。因为在无人机与防空系统的对抗过程中,提高速度可减少发现目标和打击目标的耗时,进而提高摧毁目标的效率,同时可缩短无人机暴露于地空导弹威胁区内的时间,进而提高无人机的任务存活率。高隐身性可压缩防空系统对无人机的预警距离,使无人机能够在防空系统未发现的情况完成打击并脱离威胁区,进而提高无人机的任务存活率和目标摧毁率。隐身指标和速度指标变化对体系贡献率的具体影响为:在速度较低时,保持速度不变,体系贡献率随隐身能力的提高先降后升;在速度较高时,保持速度不变,体系贡献率随隐身能力的提高单调增加。其原因在目标摧毁率,摧毁目标平均效率和任务生存率3个指标的变化情况中已经阐明。
因此,以对地攻击型无人机组成的作战体系执行对地侦察和打击任务时,若出现无人机由于机载导弹射程小,必须进入防空系统的威胁区的情况,选取RCS极小或RCS相对较小但速度极高的无人机机型的体系贡献率更高:在隐身能力极强时无人机的体系贡献率对速度变化不敏感,无人机可以完成对防空系统的打击且不被其探测到,任务生存率得到提高。此时目标摧毁率和任务生存率的值接近1且基本不随速度变化,体系贡献率的增加主要与速度提高带来的侦察耗时和打击耗时的缩短,进而使得摧毁目标平均效率得到提高有关。速度极高的无人机可通过耗尽敌方导弹的方式保证任务生存率并完成攻击,但效率较低。同时在与本文类似的作战场景中,应避免选择隐身性能较强但速度较慢的机型,此类无人机被敌方雷达探测到时两者相距较近,无人机速度较低不易脱离地空导弹攻击区,生存率极低,从而导致体系贡献率降低;在仅有此类无人机可用时,应进行战术策略的改变,如使用射程更远的空地导弹进行防区外攻击以提高无人机的体系贡献率。
7 结 论
1) 基于ABMS方法,建立了无人机和防空系统的分层模块化Agent模型。模型的通用性和扩展性较好,可根据研究需求变更模块及模块参数重构为不同装备。
2) 通过自底向上的方式实现了对地攻击型无人机搜索、打击地面防空系统,规避来袭地空导弹的动态过程仿真,为体系贡献率分析提供输入数据。
3) 从增加作战效果、提高作战效率和降低作战代价3个方面建立了作战体系效能评估指标。
4) 对新增不同数量的同类型无人机和使用不同性能指标的新机型替换原有机型后对体系的贡献率进行分析,结果验证了模型的合理性且表明无人机数量增加对体系贡献率的增加存在饱和值,无人机的隐身指标和速度指标对体系贡献率的影响存在差异性,对无人机的总体设计和作战使用策略有参考意义。
