不同航飞模式下无人机实景三维建模质量对比分析
2022-10-10周雅慧
段 胜,周雅慧
(湖南地腾土地规划咨询有限公司,长沙 41007)
0 前 言
随着无人机技术、卫星导航定位技术、摄影测量技术的发展,利用无人机搭载数据采集载荷,能够高效、全面的获取所需要的地理信息数据,已经成为了获取地理信息数据的重要手段之一[1-3]。近年来,随着小型低空消费级无人机技术的快速发展,小型低空消费级无人机产品已经成为测绘生产的重要工具之一,利用小型无人机搭载影像采集镜头,从不同的角度采集所在区域的影像数据,通过倾斜摄影测量技术,能够快速的获取采集区域的实景三维数据,其具有的灵活轻便、高精度、低成本的特点,使其成为了实景三维数据采集的主要工具之一。与此同时,测绘管理部门也在逐步推动无人机、倾斜摄影测量等新型技术的应用,鼓励采用无人机来获取实景三维数据,并应用于1∶500地形图的生产和更新。利用小型无人机开展倾斜摄影测量,获取实景三维数据,开展大比例尺地形图生产与更新,能够为地理信息数据快速获取及更新提供技术保障[4-5]。
目前利用小型无人进行倾斜摄影测量存在多种航飞模式,主要包括五向航飞、环绕航飞、摆动航飞等,不同的航飞模式在影像数据获取时间、照片数量、照片拍摄角度和分辨率上存在差异,会影响到实景三维成果数据的生产效率、模型纹理、模型精度等。为进一步研究不同航飞模式下无人机获取实景三维数据的航飞效率、建模效率、模型精度和模型质量,本文采用试验对比的方式,采用五向、环绕、摆动3种航飞模式采集实景三维数据,探讨不同航飞模式下无人机获取影像数据分辨率、航飞时间和照片数量的差异,并对各模式下制作的成果数据进行对比分析,为小型无人机实景三维数据采集提供技术参考。
1 实 验
为了分析不同航飞模式对实景三维建模成果的影响,本文采取实验对比的分析方式,在同一区域采用同一影像采集设备,分别使用五向航飞、环绕航飞和摆动航飞等航飞拍摄方法获取影像数据。利用大疆智图三维建模软件,根据各模式获取的影像数据生成实景三维模型,研究不同航飞模式下的航飞时间、照片数量、建模效率和建模成果质量,对生产效率、模型精度、模型纹理进行对比分析。
1.1 实验流程
为了分析不同航飞模型下的三维建模效率及质量,本文采用实验对比分析的方式,利用大疆无人机M300搭载大疆P1镜头(35 mm焦距版),在相同的航飞高度,采用不同的航飞模式采集影像数据。在实验数据采集过程中,使用M300无人机在同一区域搭载P1镜头在相同航飞高度完成五向、环绕、摆动等航飞拍摄任务,利用大疆智图软件,对不同航飞模式下采集的影响数据进行POS数据处理、空三数据处理和三维重建工作,生成实景三维模型。完成三维模型生成后,对不同航飞模式下采集的照片数据、航飞时间、建模时间、模型质量、模型精度进行对比分析,获取不同航飞模式下的实景三维建模效率及质量。其中模型质量分析参照CH/T 9024-2014《三维地理信息模型数据产品质量检查与验收》,模型精度检核采用实测的方式,利用RTK及全站仪设备,采集房角点、地物点和地形点的坐标,与三维模型提取的同名点坐标进行对比,获取三维模型的精度。具体技术路线如图1所示[6-7]。
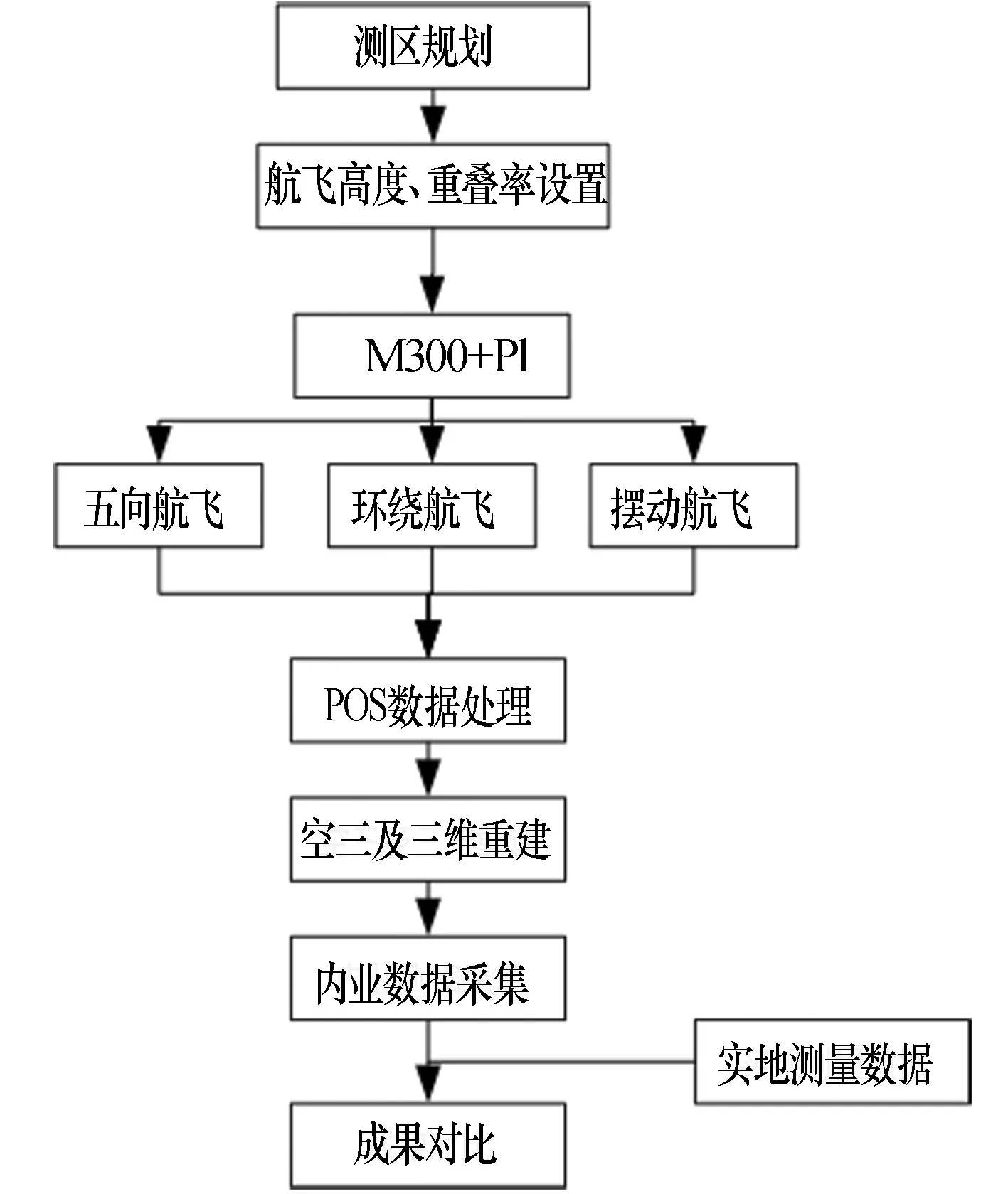
图1 不同航飞模式下成果数据对比技术路线
1.2 数据获取与处理
实验区域选取位于长沙市南部的一处包含建筑物、丘陵和平坦地表的测区,区域面积为0.45 km2,是利用小型无人机获取实景三维数据的典型区域。数据采集设备采用大疆M300无人机和P1镜头,同时为了满足1∶500比例尺测图的地面分辨率不低于2 cm的要求,所有航飞任务的相对航飞高度为125 m,航向重叠度80%,旁向重叠度70%,航飞时的天气状况为晴朗天气。在完成所有航飞影像数据采集后,利用大疆智图完成所有航飞任务POS数据处理、空三解算、三维重建和内业数据采集工作。采用RTK设备和全站仪采集三维模型同名点的坐标,进行水平方向与高程方向的综合分析。实验区域如图2所示,各航飞模式的数据采集如图3所示。

图2 航飞数据采集区域
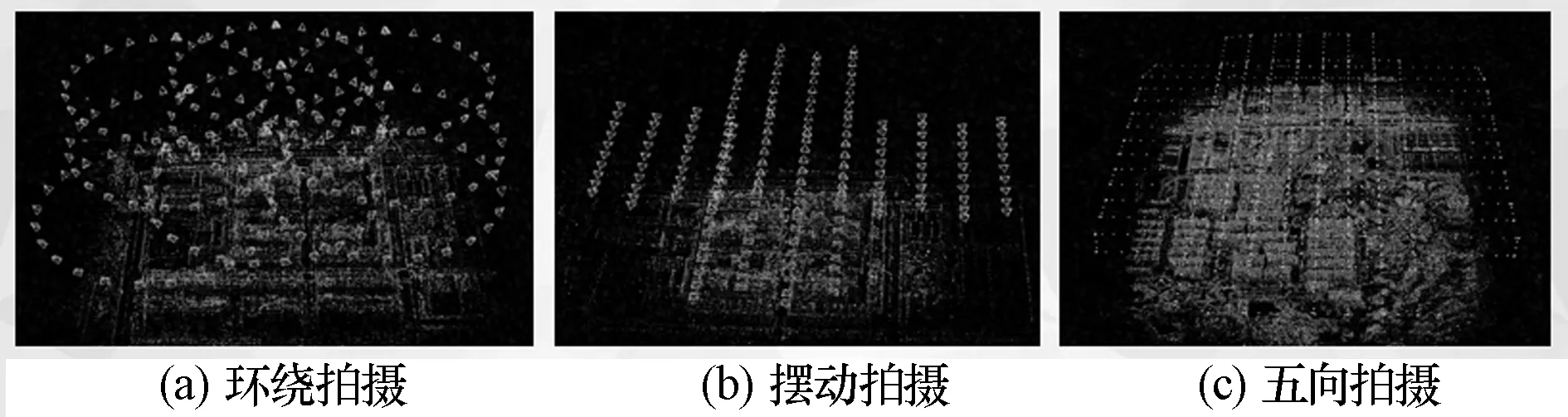
图3 航飞数据采集拍摄
2 结果分析
利用M300无人机搭载P1镜头,通过五向航飞、环绕航飞、摆动航飞完成影像数据采集后,利用大疆智图完成内业三维建模工作,对建模结果进行对比分析。对比分析主要内容包括效率分析、模型精度分析和模型精细化分析3个部分,评价不同航飞模式的三维模型成果。
2.1 效率分析
效率分析是对比不同航飞模式下的航飞时间、照片数量、内业建模时间,本次内业建模采用采用单计算机建模模式,建模使用的计算机设备的主要配置为:CUP采用因特尔酷睿i9 10900X,显卡为英伟达2080 super显卡,内存容量为128g。不同航飞模式的外业数据采集和内业建模效率如表1所示。

表1 不同航飞模式下采集生产数据指标对比
从表1可以看到,五向航飞的航飞时间为84 min,采集的照片数据量为2735张,照片数量明显多余其他拍摄方式,内业建模时间为15 h也明显比其他航飞模式所需要的建模时间要长。采用环绕拍摄方式,其航飞时间为40 min,其照片数量为611张,为所有飞行模式下照片数量最少的方式,内业建模时间为4 h,是所有航飞模式中三维建模效率最高的。摆动航飞模式的航飞时间为106 min,是所有航飞模式中数据采集时间最长的,照片数量为1405张,三维建模时间为9 h,是环绕航飞建模时间的2倍多,相较于环绕航飞模式,其外业数据采集效率和内业建模效率均无优势。此外,由于本次实验为保证数据采集设备的一致性,统一采用大疆M300无人机搭载P1单镜头数据采集模式,若搭载五镜头进行数据采集,五向航飞的飞行时间将缩短至16 min左右,其外业数据采集将为所有方式中效率最高的方式。
2.2 精度分析
模型精度是三维模型的重要数学指标之一。精度对比分析采用RTK测量设备和全站仪设备实地采集模型范围内均匀分布的房角点、地物点、地形点的平面坐标和高程,其中房角点的坐标数据采集利用全站仪获取,地物点和地形点采用RTK设备获取。获取检测点的坐标后,与三维模型提取的同名点坐标进行对比分析,获取不同航飞模式获取的三维模型精度,其具体的采集点位分布如图4所示。

图4 检核点位分布
精度计算时,若实测坐标为 (Xi,Yi,hi),三维模型上采集同名点相应位置的模型坐标为(Xi′,Yi′,hi′),计算各检查点的点位误差为(mxi,myi,mhi),其计算如公式(1)所示,最终获取模型中误差的计算方法如公式(2)所示:
mxi=Xi-Xi′myi=Yi-Yi′mhi=|hi-hi′|
(1)
(2)
经计算各个航飞模式的中误差对比如表2所示。

表2 各类航飞数据三维模型中误差对比 /m
由表2可知,五向航飞与环绕航飞的三维模型的在平面方向与高程方向的数据精度比较接近,其中平面精度分别为3.2、3.7 cm,高程方向的精度分别为7.4、0.081 cm,均能够满足GB-T15967-2008《1∶500 1∶1000 1∶2000地形图航空摄影测量数字化测图规范》中1∶500丘陵地区数据精度的要求;而摆动航飞生成的三维模型在平面与高程方向的数学精度分别为7.0 cm和14.6 cm,其精度与五向航飞和环绕航飞的生成的三维模型数据精度有着较大差距,其平面与高程方向精度误差都是其它两种航飞模式的2倍左右,无法满足规范相关要求。
2.3 模型精细化分析
实景三维模型质量评价除数学精度外,还需要对模型的完整度、精细度进行评价,其主要评价指标包括结构质量和纹理质量。其中结构质量是数据质量的直接体现,也是后续三维数据应用的主要主体。因此,本文进一步对五向航飞、环绕航飞、摆动航飞生成的三维建筑模型进行对比分析,模型精度评价方法参照国家测绘地理信息局CH/T 9024-2014《三维地理信息模型数据产品质量检查与验收》,部分模型建筑结构如图5所示。

图5 各类航飞数据生成模型
由图5和表3可以得到,摆动航飞生成的三维模型,在建筑侧面存在扭曲、空洞、细节缺失和失真等的现象,其主要原因是对待摄物的影像拍摄角度不全、数量少造成的。而环绕航飞与五向航飞生成的模型质量基本相当,建筑结构保存完整,细节还原较好,只有在窗户防护栏等复杂结构处,环绕航飞生成模型质量略差于五向航飞模型生成的模型,从整体来看,环绕航飞生成的三维模型还是能应用于后续工作与研究。
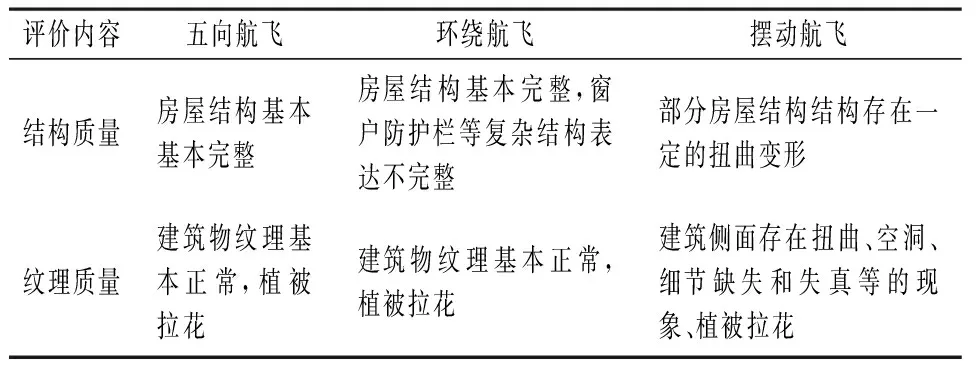
表3 各类航飞数据三维模型表模型精细度评价
3 结 论
本文针对低空消费级无人机在不同航飞模式下的数据获取效率、三维成果精度和三维建模质量等方面的差异,在实验区域采用五向、环绕、摆动等模式进行数据获取、三维建模与模型质量分析,形成以下结论:
(1) 在数据获取与制作效率方面,摆动航飞耗时是五向航飞的1.26倍,是环绕航飞的2.65倍;五向航飞的照片获取量是摆动航飞的1.94倍,是环绕航飞的4.48倍;五向航飞建模时间是摆动航飞1.67倍,是环绕航飞的3.75倍,环绕航飞在倾斜摄影测量外业数据获取上速度、照片数量和三维模型生成效率上都有着较大的优势。
(2) 在三维建模精度方面,五向航飞最优,环绕航飞建模数据精度略低于五向航飞;摆动航飞成果建模最差,其平面与高程方向精度误差都是其它两种航飞模式的2倍左右。
(3) 在建模质量方面,环绕航飞与五向航飞的模型质量相当,建筑结构保存完整,部分窗户护栏等复杂结构表达不完整;而摆动航飞的模型存在扭曲、空洞、细节缺失和失真等情况,严重影响模型的后续使用。环绕航飞在数据获取、制造效率上存在较大优势,在建模精度与建模质量等方面与五向航飞基本相当,因此,在高时效性的高精度数据采集时,可以采用环绕航飞进行航飞作业,从而减少外业数据获取时间,提高内业数据处理效率,保证中小区域实景三维建模以及大比例尺测图数据获取时效性。
本文利用小型多旋翼无人机进行摆动拍摄、五向拍摄和环绕拍摄3种航飞模式采集影像数据,对3种航飞模式生成的实景三维模型开展了数据采集效率、数学精度和模型质量分析,结果表明:摆动航飞的采集效率都不具备优势,建模数学精度相较于其他两种模式明显较低;环绕航飞拍摄方式,其数学精度与单镜头五向航飞拍摄方式相当,建模精细度相当略差于五向航飞,但其具有外业数据采集速度较快、照片数量少、内业建模时间短等优势,是硬件条件不足、模型精细度要求较低以及数据采集时效性较弱时的有效解决方案,可为中小区域实景三维数据采集以及大比例尺测图数据获取提供参考。
