大落差稀疏像控点倾斜摄影建模及精度评价
2022-10-10贺春林何领军薛凯凯胡晓宝李贾亮
贺春林,何领军,薛凯凯,张 钊,胡晓宝,李贾亮
(1.中国电建集团西北勘测设计研究院有限公司,西安 710065;2.国家能源集团西藏电力有限公司,拉萨 860019)
0 前 言
随着中国水电开发逐渐向西部推进,待建类、规划类水电工程地理位置偏远,自然条件恶劣,基础设施落后,交通条件困难,加大了工程测绘的难度。目前,根据水利工程建设选址特点,峡谷地形三维测绘中,最优解决方案为无人机倾斜摄影测量技术。然而,由于峡谷地形条件的限制,测绘像控点的布设具有很多实质性困难,例如:像控点高差和平面分布不均、陡峭区域无法布设等,这些不利因素对倾斜摄影测量技术提出了新的考验。在基于倾斜摄影测绘技术生产三维测绘产品[3]过程中,像控点点位分布决定着测绘产品的精度。鉴于此,本文以中国新疆地区某水电站三维测绘为工程依托,针对大落差峡谷坡面大面积像控点无法布设的情况,采用国内目前较为热门的倾斜摄影测量技术,通过边缘式布点进行实景三维模型构建,探索了适合大落差陡峭峡谷区域三维测绘的作业方式,并对其产品精度进行了评估,验证了方案的可行性。
1 倾斜摄影实景三维建模
倾斜摄影技术是21世纪初发展起来的一项高新技术,它改变了传统航摄思路,打破了正射影像只能从俯视角度拍摄的局限性。倾斜摄影技术是通过在同一飞行平台上搭载多台传感器,同时从1个垂直、4个倾斜等5个不同的角度采集影像,并根据GPS/IMU系统获取的POS数据及外业像控点,运用相关软件平台生成4D产品及三维实景模型等数据。实景三维模型不仅能够贴合实际反应地物情况和最大程度还原实地场景,而且还通过采用先进的定位技术,嵌入精确的地理信息、更丰富的影像信息、更高级的用户体验[4-5]。倾斜摄影技术的发展,快速推进了三维测绘产品品质的提升,大大降低了实景三维建模成本。
倾斜摄影实景三维建模步骤:① 对倾斜摄影区域相关资料搜集和准备;② 制定倾斜摄影航飞方案并审批;③ 对倾斜摄影区域进行影像数据和地面数据采集;④ 运用专业软件对影像数据做空三加密;⑤ 自动化重建三维模型;⑥ 利用外业控制点和检查点对三维模型成果进行精度检查。倾斜摄影实景三维建模流程见图1。
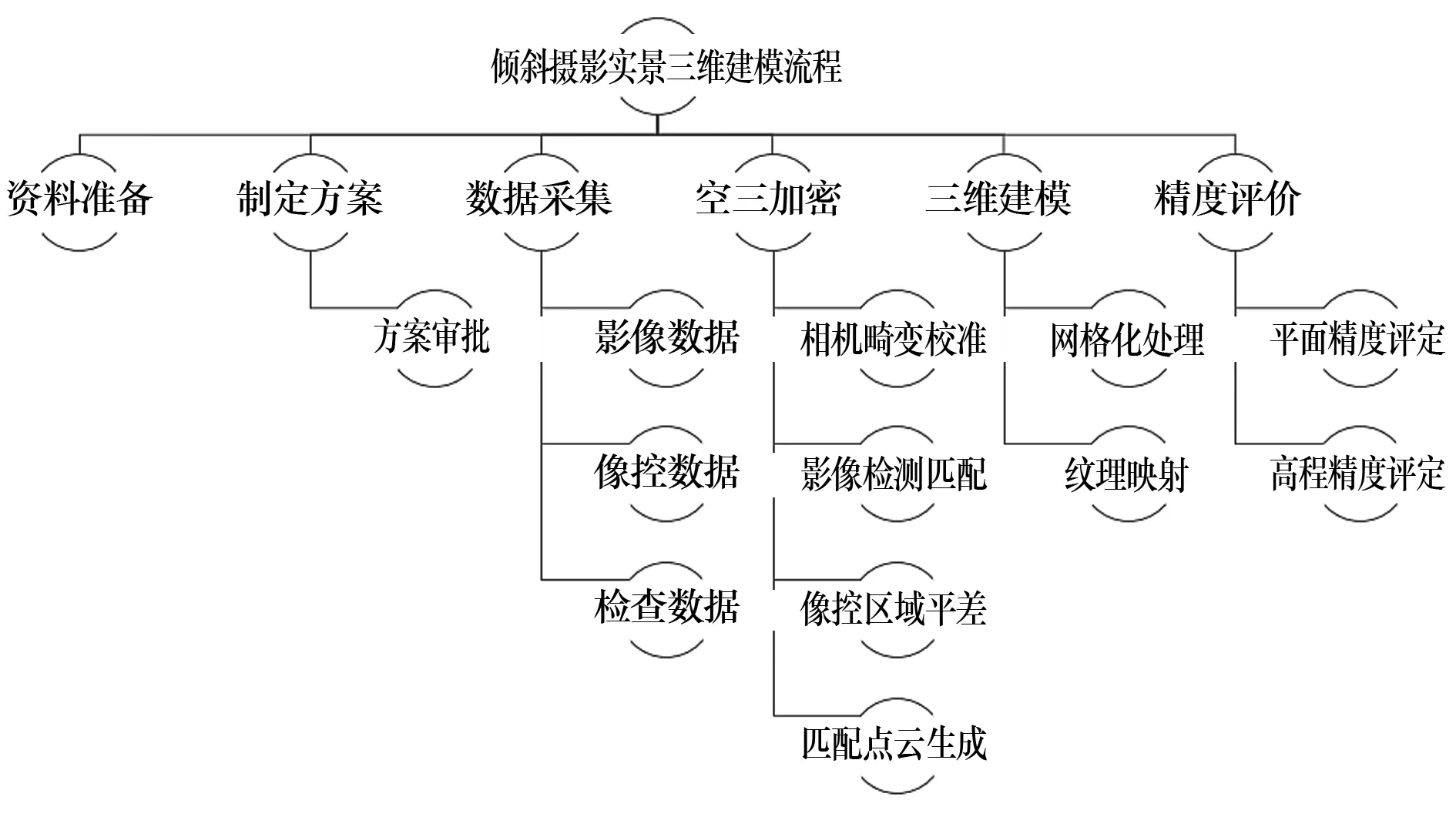
图1 倾斜摄影实景三维建模流程
2 案例区域及数据采集
2.1 案例简介
本案例为国内某大型水电站开发三维测绘项目,大坝修建在峡口咽喉位置,谷底海拔1 500.00 m,水利枢纽区右岸边坡高度1 200.00 m,峡谷长度2 km,其中坡面面积3 km2,地势崎岖陡峭,从业人员根本无法抵达指定区域。本次作业采用多旋翼无人机搭载5镜头相机进行倾斜摄影。由于地形条件的限制,像控点只布设在了高边坡的顶部和峡谷低高程区域,其中1 800.00 m至2 700.00 m高程属于像控点空白区。外业完成数据采集后,内业利用专业软件进行实景三维建模,获取OSGB、DOM、LAS等格式数据,最后利用全站仪采集高边坡检查点数据,对模型成果精度进行检验。水电站三维效果见图2。

图2 水电站三维效果
2.2 设备选用
在倾斜摄影测量方面,为了真实获取峡谷坡面地形地貌数据,首先要保证影像分辨率满足相关要求,其次要保证建模的精细化程度。这样对飞行平台就有一定的要求,往往需要低空、低速飞行器,而旋翼无人机具有操控性强、安全性高、可垂直起降和悬停等优势,无疑是倾斜摄影测量的最佳载体。旋翼无人机系统对起飞着陆地点要求很低,可垂直起降,且高度智能化,可实现多姿态飞行。选用设备见图3。
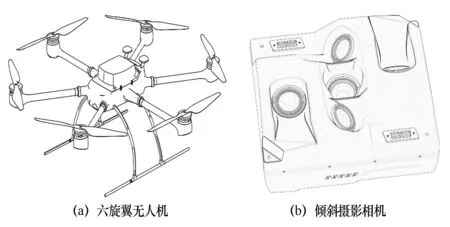
图3 选用设备
由于案例区域落差为1 200 m,多数起飞平台高度受限。经调研,最后选用了KWT-X6L-15型专业级六旋翼无人机。该机型轻载下,可实现75 min续航时间,飞行距离大于38 km。相对爬升高度可达4 000 m,最大工作海拔高度5 000.00 m。升力充沛,飞控针对抗风做了优化,使得该机型抗风能力表现即为优越,常规飞行更加安全,生产力更高。
相机选用了睿铂性能指标最高的一款全画幅倾斜摄影相机:DG4Pros,该机型体积小,外形仅155 mm×130 mm×98 mm(长×宽×高),重量轻至960 g。正射光学镜头焦距为40 mm,倾斜镜头焦距为60 mm,倾斜正射焦距比1∶1.5,其采集的影像通过建模软件可自动生产各种需求分辨率的真三维模型。
2.3 影像数据采集
(1) 航线设计:案例区域地势陡峭,右岸坡高差1 200 m,按照传统的航摄分区根本无法满足要求。航高根据所航摄区地面分辨率和现场周边情况综合考虑进行变高设计。航高示意见图4及公式如下:

图4 航高
(1)
公式(1)中:h为飞行高度,m;f为镜头主距,mm;a为像元尺寸,μm;GSD为地面分辨率,cm。
影响三维模型质量最重要的因素之一是影像分辨率。由于案例区域地形变化复杂,为了解决这一问题,结合地形起伏情况设计了变高航线,最大程度上做到测区内航高相同,从而获取GSD相对一致的倾斜数据。为了满足三维建模对于高精度、高分辨率的需求,航线设计相对地面高度为200 m,设计分辨率为2~4 cm,设置航向重叠率为80%,旁向重叠率为70%,航线设计如图5所示。
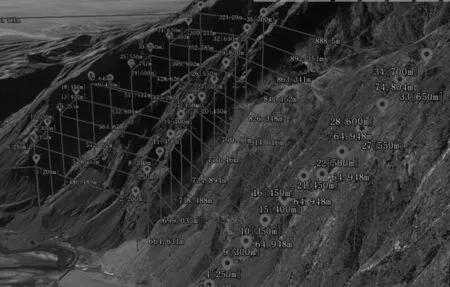
图5 单架次航线布设
(2) 像控点的布设及影像数据采集:在倾斜摄影航测作业中,为了保证模型精度,像控点布设是必不可少的。
由于地形条件的限制,右岸边坡高程1 800.00~2 700.00 m施测人员很难抵达现场,本次施测未布设像控点。为了控制整个区域精度,作业人员耗时15 h绕道攀爬至右岸坡顶区域均匀布设了4个永久像控标靶。在谷底能够到达的区域,根据地势变化情况均匀地布设了21个像控点。点位分布如图6所示。
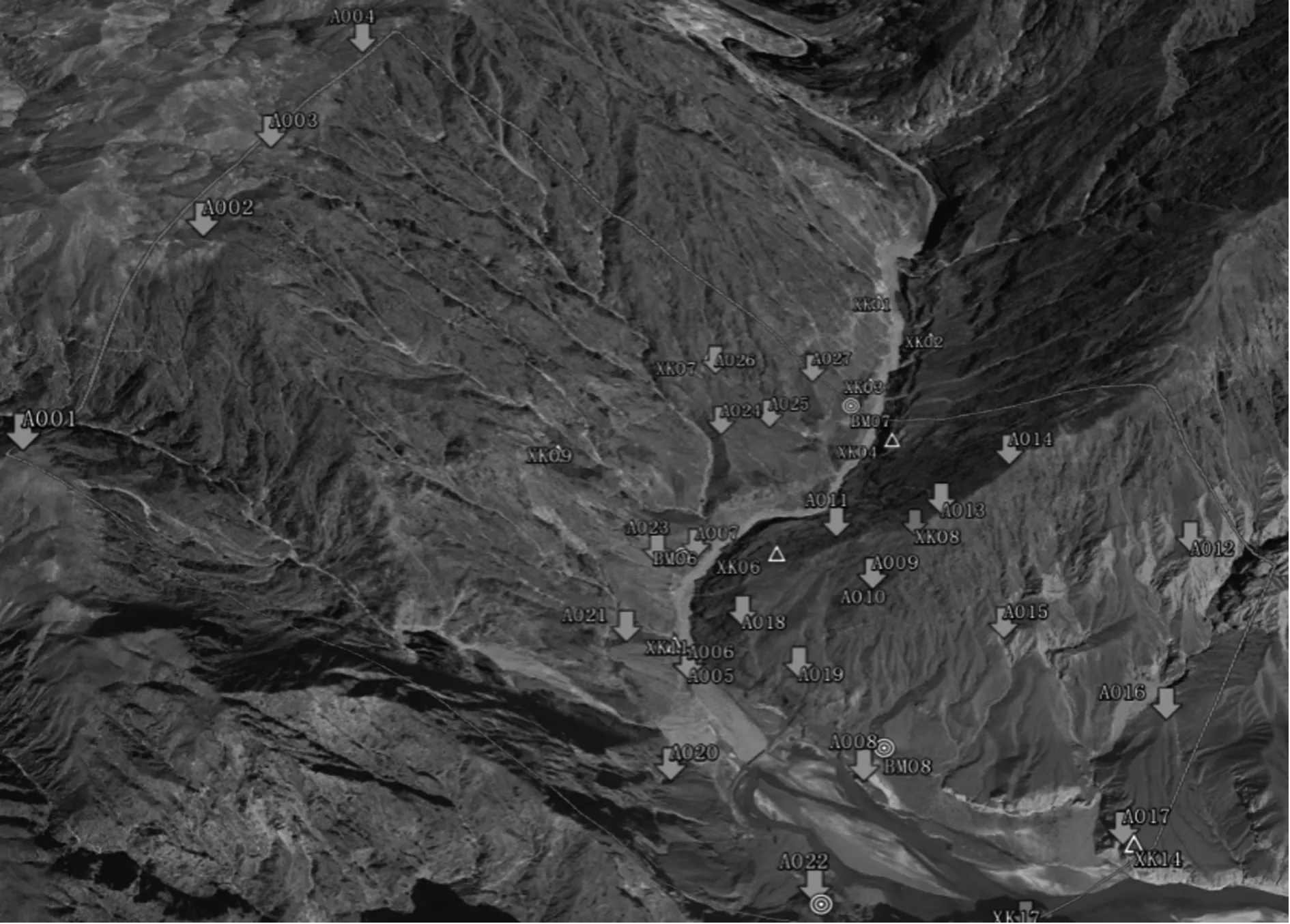
图6 像控点分布
本案例区域共计航拍9架次,共获取影像25 500张。通过对定位、定姿数据分析可知,其飞行稳定,航线弯曲度、行高保持良好,像片纹理清晰,层次丰富,色调均匀,可为后期构建高质量三维模型使用。
3 实景三维模型构建及精度评价
3.1 空中三角测量
空中三角测量是根据少量的野外控制点,在室内进行控制点加密,求得加密点的高程和平面位置的测量方法,是倾斜摄影测量三维建模的关键步骤[6]。在做空中三角测量之前,首先要对采集到的原始影像数据进行预处理,对原始影像数据进行色彩、亮度和对比度等方面的调整和匀色处理。由于五镜头相机摄影倾角大,采集的原始影像重叠多且分辨率无法统一,使其空中三角测量和传统数字航空摄影测量中空中三角测量方式大不一样。传统空中三角测量加密方法无法实施,需要专业级多视角空中三角测量软件进行数据处理。
本案例采用的空中三角测量软件,操作步骤简便,支持计算机联合运算,是业内知名的自动化三维建模软件,具体步骤如下:
(1) XML文件整理:采用新型文件整理格式,将PPK解算后的POS信息,替换飞行平台自带的POS文件,并将POS信息、相机参数、影像数据储存位置信息及坐标系统信息进行整理,编辑成符合空中三角测量软件识别的XML格式;
(2) 相对定向:应用空中三角测量软件加载XML进行多视角影像特征点密集匹配,并以此进行区域网的自由网多视影像联合约束平差解算,建立在空间尺度可以适度自由变形的立体模型,完成相对定向;
(3) 绝对定向:在空中三角测量软件中进行像控刺点,利用点位信息对已有区域网模型进行约束平差解算,提高空中三角测量加密过程中影像匹配的速度和精度,对空中三角测量成果进行控制加密,转换建模成果的坐标系,完成绝对定向[7]。
具体步骤如图7:
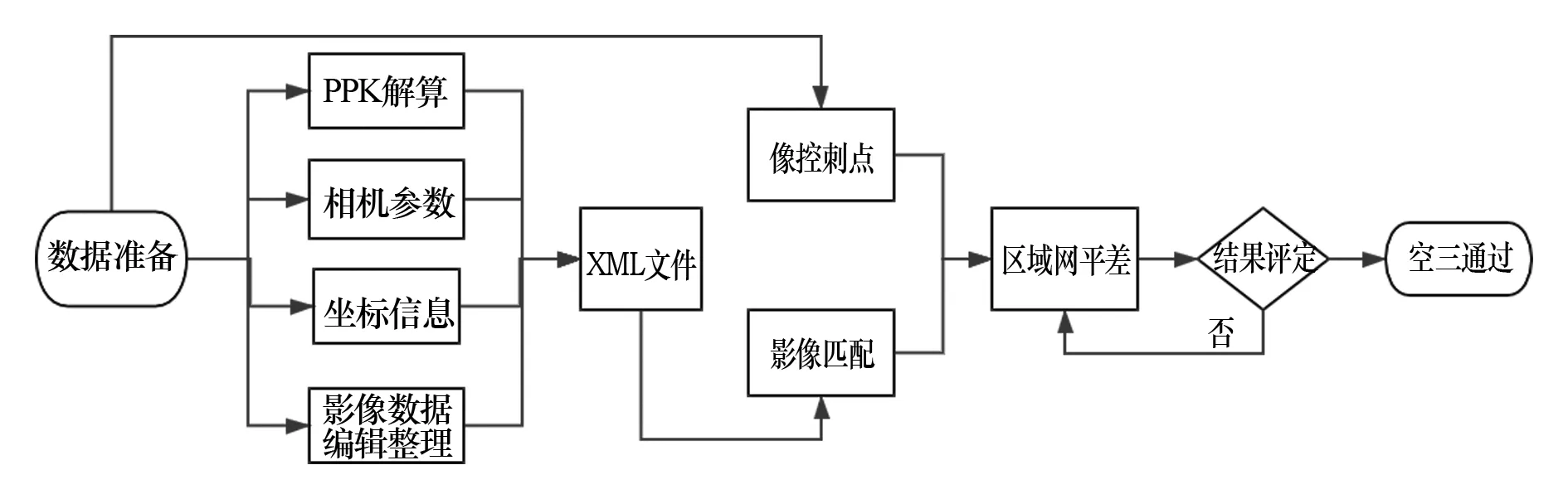
图7 空中三角测量流程
3.1 实景三维模型建立
空中三角测量加密通过后,基于最终优化的空中三角测量加密成果进行实景三维模型构建。根据高密度匹配点云,软件自动进行影像金字塔构建、不规则三角网(TIN)构建,优化TIN网后生成白模,再通过对白模进行自动纹理映射(自动选择最佳影像纹理进行贴图)生成基于真实影像纹理的三维实景模型,模型效果如图8所示。

图8 三维模型效果
根据模型生产范围大小和计算机运行内存情况, 一般选择规则平面网格分割方式。由于此案例主要为大比例尺三维测绘产品生产,因此选择生成产品为三维模型,数据格式为通用格式.OSGB。
3.3 三维模型精度评定
三维建模完成后,基于实景三维模型数据,应用专业的模型浏览器,可以轻松测量坐标、距离、面积等信息。目前,实景三维模型精度评价指标中,最重要的评价指标为数学精度,其次为模型影像分辨率。本案例为了检查右岸边坡无像控控制区域模型精度,主要按照数学精度检测方法,对三维模型的绝对精度进行验证。首先,利用RTK配合全站仪在像控盲区采集特征点52个,假设野外实测数据为真值,将实测数据与三维模型上读取的坐标值进行比较,对比结果详见表1。
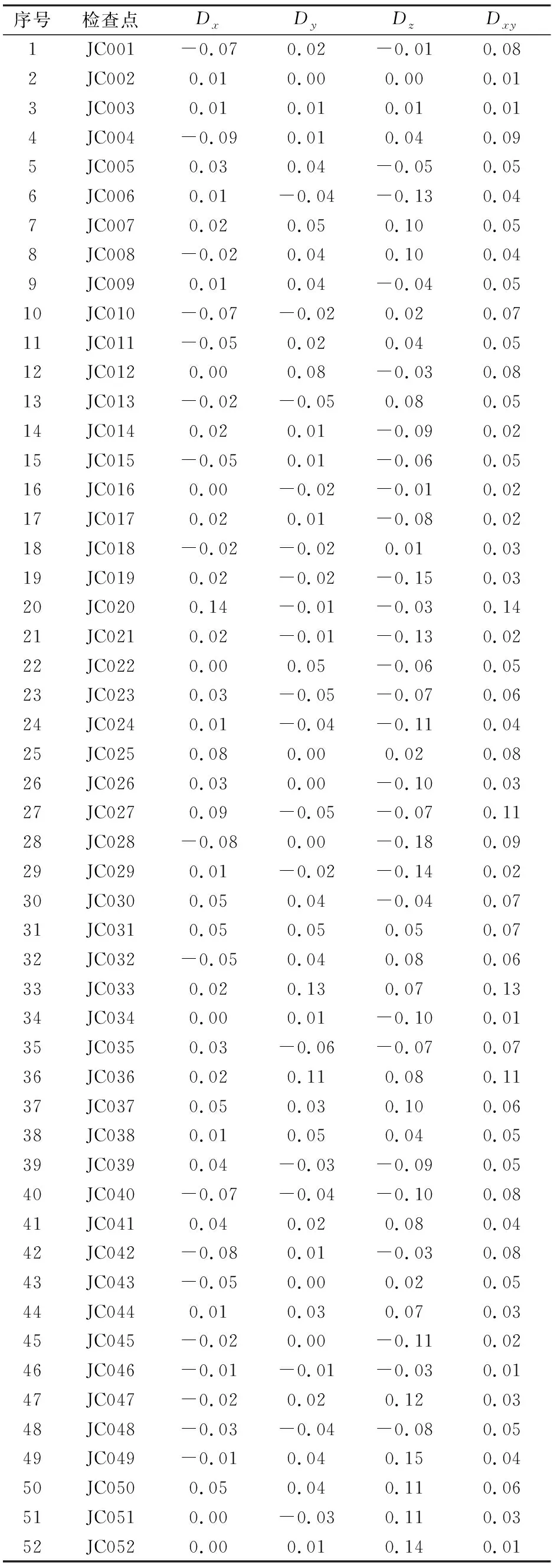
表1 实测点与模型点对比统计表 /m
利用中误差计算公式计算模型点的坐标偏差:
(2)
(3)
(4)
(5)
公式(2)~(5)中:Mx代表X方向中误差,m;My代表Y方向中误差,m;Mz代表Z方向中误差,m;M代表平面距离中误差,m;Δx、Δy、Δz分别代表x、y、z方向真误差,m;n为检查点个数。
通过上述统计表格和公式计算可知,X方向的最大误差为0.09 m,中误差为0.045 m;Y方向的最大误差为0.13 m,中误差为0.40 m;Z方向的最大误差为0.15 m,中误差为0.085 m;平面的最大误差为0.14 m,最小误差为0.01 m,中误差为0.133 m。结果表明,该区域三维模型精度满足《三维地理信息模型数据产品规范》中Ⅰ级成果平面精度中误差不超过0.3 m、高程精度中误差不超过0.5 m的要求,满足1∶1000比例尺4D测绘产品生产精度要求。
4 结 论
本文以新疆某水电站为工程依托,采用大落差稀疏像控点倾斜摄影建模技术,建立了水电站工程区域高精度三维实景模型,并对其精度进行了验证,主要结论如下:
(1) 选用多旋翼无人机搭载五镜头相机进行倾斜摄影作业,操作简单,起降灵活,精度可靠,可有效降低大落差坡面影像数据采集难度。
(2) 基于倾斜摄影技术生产的三维模型精度较高,能够从多角度进行数据采集,充分展现项目区域的地形地物信息。
(3) 航线通过变高设计,保证了地面分辨率的统一,进而确保了影像拼接质量,实现了测区敏感区域的“特殊照顾”。
(4) 边缘式布点方案可显著降低外业作业成本,保障从业人员的安全,使工程作业实现“安全进度两不误”,在非峡谷区域也有一定的推广价值。
本文以西北植被稀少区为案例,实验区域较为理想,对于西北植被茂密区域的三维测绘工作具有一定的局限性,宜优先考虑机载激光雷达作业。
