基于双靶X线球管的双束X射线的金标成像实时跟踪可行性
2022-10-09胡咪胡逸民全红
胡咪,胡逸民,全红
1.武汉大学物理与科学技术学院,湖北武汉 430000;2.中国医学科学院中国协和医科大学肿瘤医院放疗科,北京 100021
前言
X 射线三维适形(Three-Dimension Conformal Radiotherapy, 3DCRT)和调强适形(Intensity-Modulated Radiotherapy,IMRT)技术已成为现代放疗的基本技术。 图像引导放疗(Image-Guided Radiotherapy, IGRT)是保证3DCRT 和IMRT 得以精确执行的一种必要技术;在执行(体部)立体定向放疗(Stereotactic (Body) Radiotherapy, SRT/SBRT)中,实施IGRT 尤为重要[1-4]。自1995年以来,通过千伏(kV)和兆伏(MV)成像引导常规直线加速器的技术已广泛应用于临床放疗[5]。目前实现IGRT的摆位时刻及实时图像引导方式主要有:(1)皮肤标记-3D 激光灯近红外跟随技术;(2)体内标记加kV-X 射线;(3)体内标记加MV-X射线;(4)超声;(5)CT/MRI/PET实现摆位时刻引导等,其中技术(1)~(3),特别是技术(1)和(2)目前最为常用。
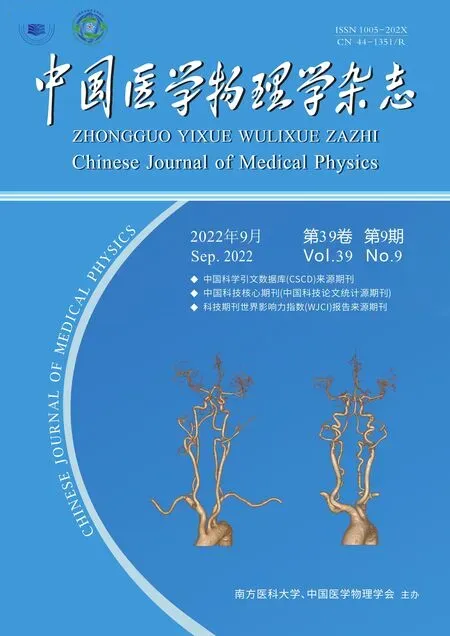
瓦里安、医科达公司等利用单束随治疗机架转动的kV-X 线束实现摆位时刻验证,称为CBCT 技术[6-7]。将X 射线球管安装在治疗加速器机架上,利用机架旋转到不同两个角度,获取金属标记点的位置(图1a),从而实现摆位时刻的位置引导;目前CBCT 技术已成为加速器生产厂家的标准配置。利用kV-X 线跟踪体内金属标记时,需要机架转动角度才能获得体内金属标记物的位置(即肿瘤位置),而在kV-X线获取金标记影像时,不能进行照射,故该技术只能实现治疗摆位时刻的图像引导。中国深圳科瑞特公司最早使用双束交角MV-X 线,以及安科瑞和博依莱公司最早使用双束交角kV-X线实现金球标记下的IGRT[8--10]。该技术需要双X 线球管交角布置,kV-X 线装置(包括球管和影像平板)与加速器分开安装,具有一定的局限性[11-12]。实时跟踪系统与加速器治疗系统的坐标系是分开的,两者等中心的一致性需要频繁校准,且不能灵活调整成像方向,故有可能被六维移动的机械治疗臂或治疗床遮挡成像视野,但两个交角布置的球管可以实现实时图像引导。还有一些其他的创新,包括光学表面扫描仪Catalyst HD(C-RAD AB)、超声引导[13]、MV 锥形束计算机断层成像(MV-CBCT)、计算机断层成像(CT)、磁共振成像(MRI)[14-15]和正电子发射断层成像(PET)等。
本研究利用双靶点X 射线球管产生的平行双锥束X射线,通过一次成像获得靶区内金标记的一组对应的2D 投影坐标(图1b),对此投影坐标进行反向重建就可以得到金标记在靶区(肿瘤内)的位置。安装在治疗机架上的这种双靶球管可以与治疗加速器的出束照射同步进行,可实现金标记的实时追踪。该球管的两个阳极靶之间的距离必须保证同一金标记在探测器上的两个投影位置都能被识别。本研究对此靶间距进行探究,并提出此靶间距下双靶成像的金标记投影实时快速检测算法。
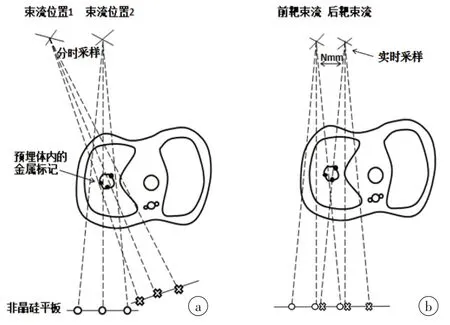
图1 现行CBCT(a)与采取本球管的CBCT(b)读取金标记点投影示意图Figure 1 Schematic diagrams of obtainingthe projections of the gold markers using the current CBCT(a)or double-anode-target X-ray(b)
1 材料与方法
1.1 双靶点X线球管
图2a 为本研究使用的一种新型的双靶面阳极X射线球管的结构示意图,包括阴极部分和阳极部分,阳极部分设有旋转阳极体,旋转阳极体的端面为朝向阴极部分外凸的圆弧面,在端面上的距旋转轴线一定距离处围绕旋转轴线的环形区域上镀覆靶面材料形成环形的靶面。如图2b 所示,在该环形的靶面上沿圆周方向等间距形成多个相同的沿旋转轴线方向的盲孔,在环形的靶面上的未开盲孔区域形成多个相同的第一阳极靶面;每个盲孔的底部形成圆环链形的第二阳极靶面,第一阳极靶面和第二阳极靶面的数量相同且面积、直径相等,距离阳极体旋转轴线的距离相等,并且彼此之间等距离地交替设置[16]。当阳极体旋转时,由阴极部分发射的电子轮流轰击第一阳极靶面和第二阳极靶面,产生平行双锥形X射线束。如图2c、图1b所示,利用该双靶球管产生双束平行的锥形束,在对侧平板上同时出现同一金标记(球)的两个投影,反向重建得到金标记(球)在体内的位置。
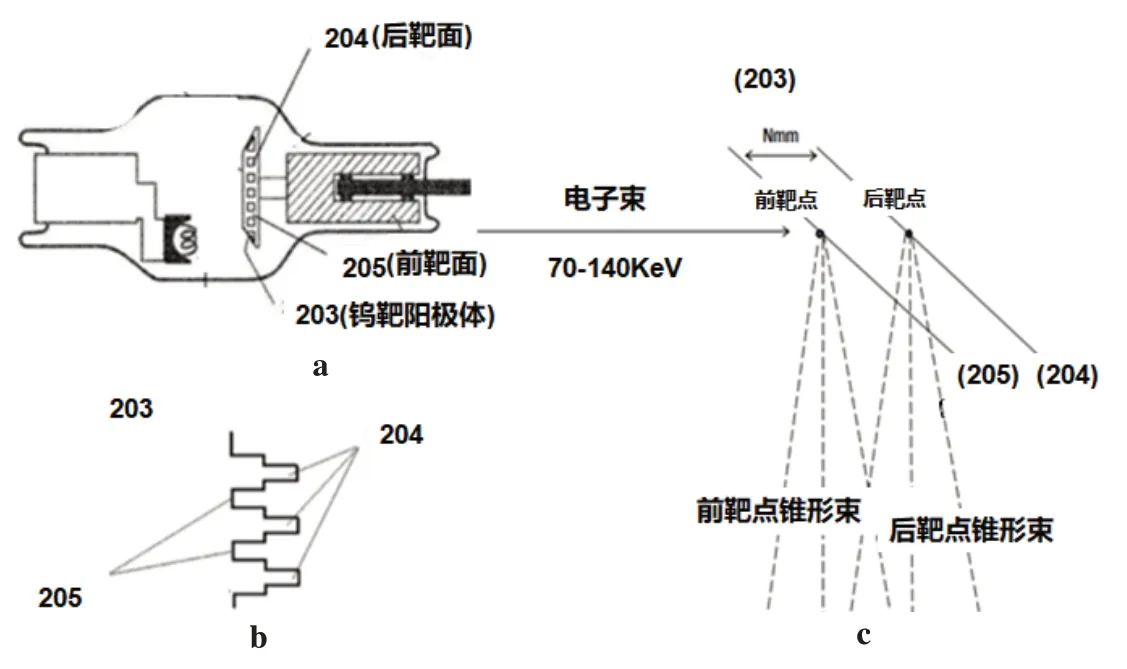
图2 双靶面阳极X射线球管结构图(a,b)及其产生的平行双束锥束X射线(c)Figure 2 Structure diagrams of double-anode-target X-ray tube(a,b)and the produced parallel double cone-beam X-ray(c)
1.2 实验设计
本研究实验设计见图3。将一组3个直径为3 mm的金球标记随机预埋到Alderson Rando 模体的盆腔部位模体内,金球标记的位置限制在模体中心周围10 cm×10 cm×10 cm 的虚拟立方体内。将模体放置在医科达Synergy 医用直线加速器治疗床(PPS)的床面上,需大致将模体摆位在使金标记位于等中心点周围的位置,通过深度千分尺沿床板纵向微移特定间隔使其位于对称位置,并进行3D-CBCT扫描,测量出3 枚金标记在模体中的实际位置(3D 坐标),记录为参考坐标值Pref。将加速器机架角度设置为270°,对模体进行kV-X 线的零度投影成像,出束获得一帧模体零度锥形束投影图像在距离等中心点40 cm 的探测器平板上。之后沿床面水平轴线以特定间隔微移模体,获得第二帧模体投影图像在相同的探测器平板上。本实验中预设间隔为距离等中心点2~12 mm的等差对称位移,每个对称位置的两次曝光为一组实验,进行11组等间距对称位移共计22次实验,将对侧非晶硅平板上一组两次曝光的金球标记投影图像相叠加,用自建的软件对金标记投影坐标进行识别与分析。若识别成功,记录此时模体的间距,并从这些能认别的间距中找到最小间距值,即为双靶X线球管的最短双靶间距。然后利用本算法反向投影重建,得到金标记在模体中的实际位置(3D坐标),并与参考3D 坐标值(Pref)进行比较,通过计算每组的坐标值与参考坐标值的偏差来估计算法的精确度。为避免引进额外的模体微移误差,使用精度为±3 μm 的深度千分尺(型号为128-104,苏州量子仪器有限公司)控制模体移动。X 射线源(靶)到模体中心距离为100 cm,到非晶硅平板距离为140 cm。
图3 实验布置Figure 3 Arrangement of the experiment
1.3 金标记投影2D坐标检测
多位作者已建立了读取kV级X线检测金标记投影成像2D 坐标的算法,精确度高且重建时间短[17-23]。本研究将采取类似此种金标记2D投影坐标检测的方法,利用医科达Synergy 加速器上的CBCT 对植入金标记的模体进行kV-X 线零机架角度投影成像,之后采用如下步骤和算法从投影图像中提取金标记2D投影坐标(图4)[24]:(1)依据金标记在图像上的大致位置对原始图像进行剪裁,突出带有金标记投影的图像。(2)对图像进行高斯平滑,因原始投影图像中伴有噪声,包括多叶准直器的边、床板的栅栏以及骨骼等,消去带有明显不连续的假信号;然后再利用拉普拉斯算子对图像进行锐化,强化突出金标记投影点位置。(3)将平滑图与锐化图相叠加,获得最终LoG处理图像。(4)通过在灰度值图上设置合适的阈值将候选金标记点坐标从背景噪声中提取出来,并对候选金标记点进行圆曲率筛选,得到最终的金标记点投影2D坐标。
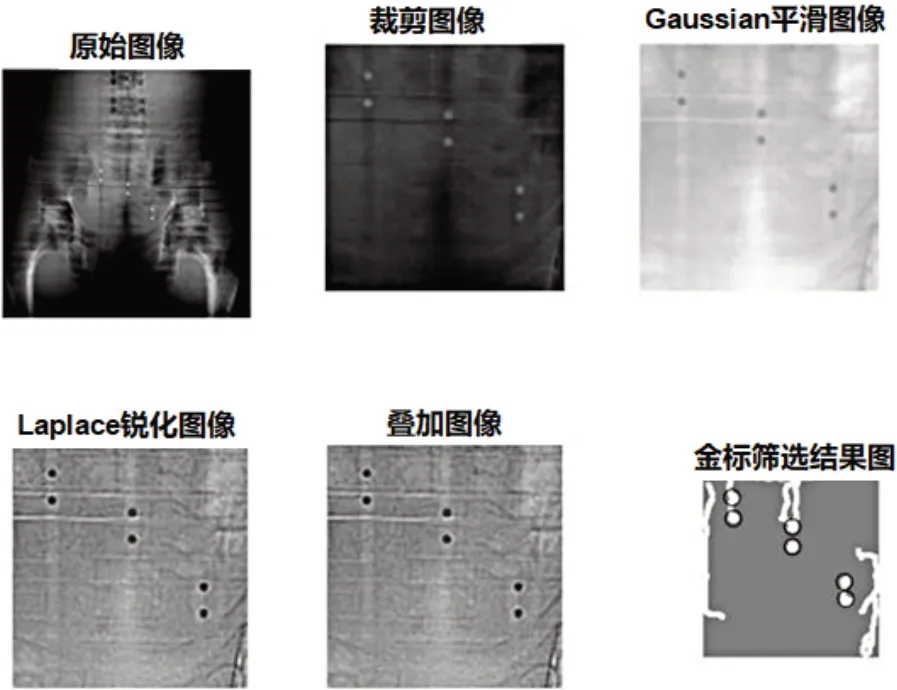
图4 金标记2D投影坐标读取Figure 4 Readout of the 2D projected coordinates of gold markers
1.4 金标记3D位置坐标重建
通过上述方法从投影图像提取出金标记的投影2D 坐标之后,将采集到的所有金标记2D 坐标反向投影到模拟的双靶点,读出这些反向投影线所有可能的交点值,对交点值进行适当的筛选就可以得到金标记在模体中的3D坐标(图5)。
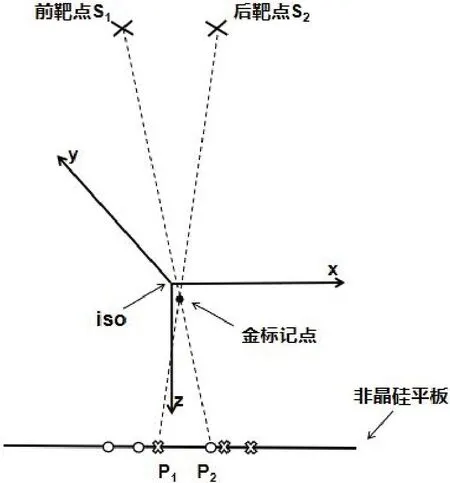
图5 金标记3D坐标系Figure 5 Golden marker 3D coordinate system
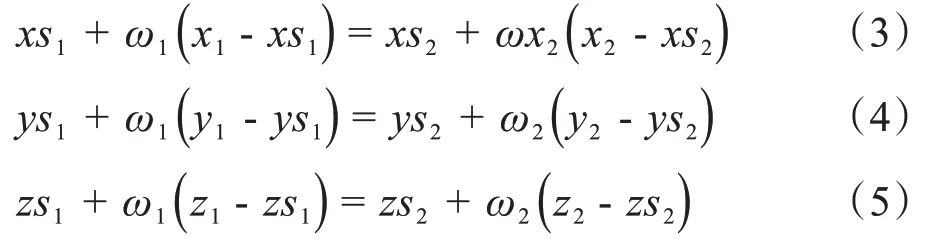
对靶区内金标记进行成像获得金标记的11组22幅对称位置投影图像,首先将组内对称位置的图像相叠加,利用上述方法提取到每幅叠加图像中金标记的6个2D坐标(x,y)之后,将每个金标记投影点2D坐标对应到金标记3D 坐标系当中P1~6(x1~6,y1~6,z1~6)(因投影图像均在成像探测器平面,故z为探测器距原点中心的距离,本实验为140 cm)。在此3D 坐标系中,已知双靶面放射源前靶点坐标S1(xs1,ys1,zs1)及后靶点坐标S2(xs2,ys2,zs2)(设双靶点距离n从2~12 mm 等间距增加,则xs1、xs2分别为,ys1、ys2均为0,zs1、zs2为放射源到等中心的距离,本实验为100 cm)。任取金标记两个投影3D 坐标P1(x1,y1,z1),P2(x2,y2,z2),用向量代数的方法求此两投影点与双靶面两放射源靶点对应连线是否存在交点。
两个投影点与两个放射源靶点相对应的连线参数方程分别为:

当这两个金标记投影点对应的是同一个金标记时,则这两条射线参数方程存在交点,意味着有ω1、ω2使得L1=L2。
找到ω使得:
则金标记的3D坐标为:

若Sinters存在,则为一个金标记的3D坐标;若不存在,则换下一组金标记投影2D坐标,如此循环直至找到全部3 个金标记的3D 坐标。这种只需要金标记的两个投影点的2D 坐标就可以重建出该金标记3D 坐标的算法结合一次照射即获得两幅投影图像的双靶点X线球管可以实现实时成像。
金标记3D 坐标的重建流程见图6,将提取到的3个金标记投影点2D坐标写入P1~P6,不断交叉计算与S1、S2是否存在交点。
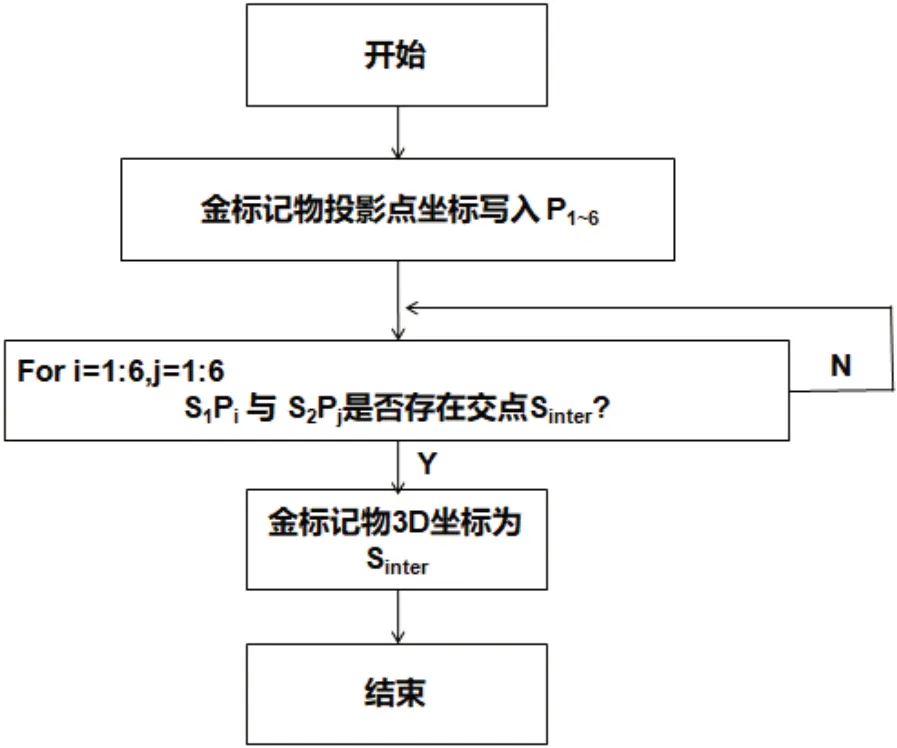
图6 坐标重建流程图Figure 6 Flowchart of coordinates reconstruction
2 结果
本实验提取的2D 坐标结果见图7。当等中心点到射线源距离为100 cm 且到探测器的距离为40 cm,金标记位于2~7 mm 的间距时,金标记间的投影相互交叠,不能成功被检测到;仅当金标记间距大于等于8 mm 时,金标记的位置才能被准确地检测提取到。本实验中,3 枚金标记的2D 投影坐标的读取误差为(±0.176、±0.140)mm。应用本算法反投影出的金标记3D 坐标的结果见表1 和图8。图8 的坐标依次为头脚、左右和前后方向,提取结果总体非常稳定。

图7 金标记的2D坐标提取结果Figure 7 Extracted 2D coordinates of gold markers
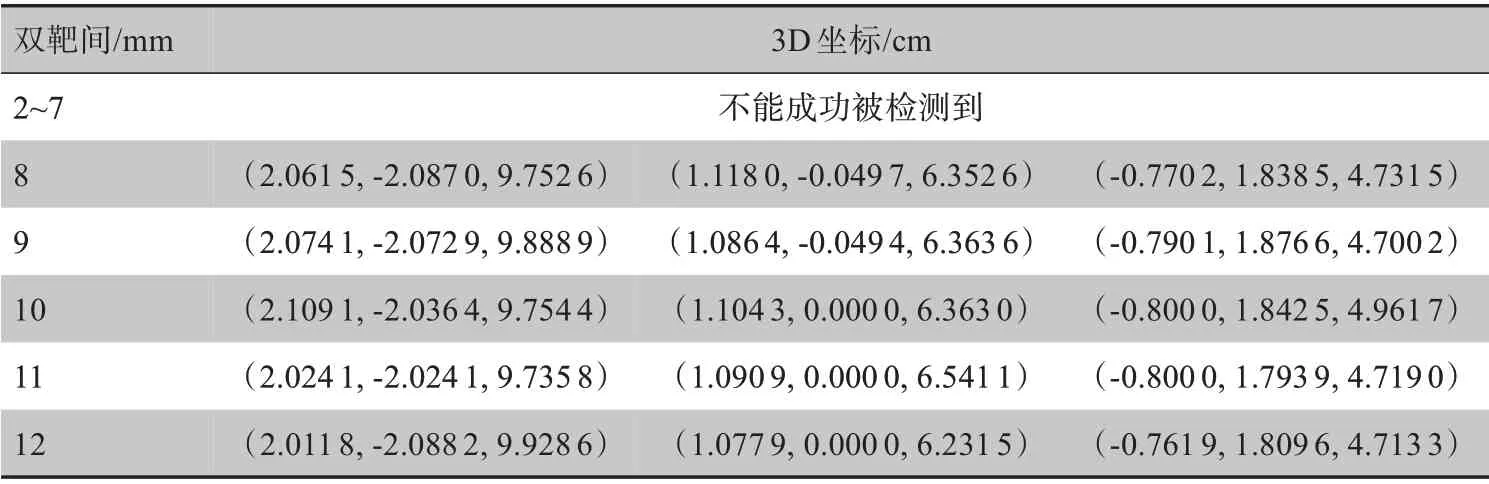
表1 3D金点坐标重建结果Table 1 Reconstructed 3D coordinates of golden markers
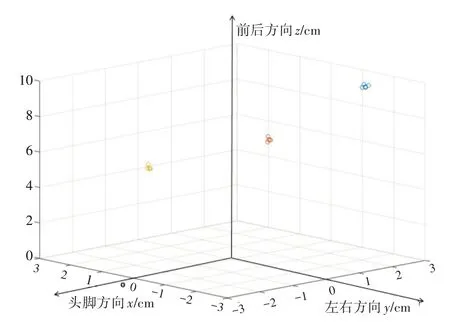
图8 金标记的3D坐标提取结果Figure 8 Extracted 3D coordinates of golden markers
当金标记间距为8 mm 及以上时,3 枚预埋入模体的金标记重建3D 坐标误差见图9。三维坐标重建误差为(±0.242、±0.392、±1.036)mm。
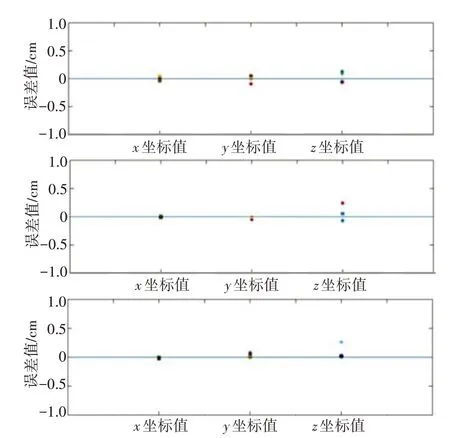
图9 3D坐标重建误差Figure 9 Deviations of 3D coordinates reconstruction
由于双靶点X线球管暂无产品,无法真正应用于本实验中,因此本实验是以加速器室内激光灯比对深度千分尺手动推进平移模体,使其位于对称位置的方法来等效模拟实现双靶点X 线球管成像。激光灯束本身有一定的大小,实验观测者的判断和估计读数上的变动性等会出现一系列的随机误差。为评估误差,同一观测者对打入一个金标记的模体重复进行3 次手动推进平移特定距离,并在Synergy 加速器上施行3D-CBCT 确定模体中金标记的实际3D 坐标(xi,yi,zi),与金标记3 个坐标的平均值作为坐标的理想值3D 坐标(u,v,w)代入公式来计算实验的精确度[25]。

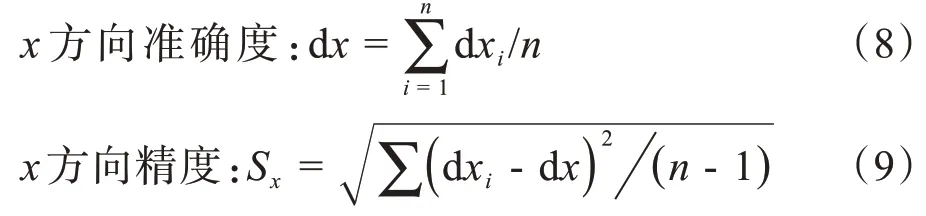
其中,n为平移的次数,本实验中为3。
y、z方向准确度、精度与x方向对应参数计算公式相同。得到各个方向准确度为(0.203, 0.097,0.233)mm,精度为(±0.084,±0.084,±0.067)mm。获得的金标记3 个坐标的平均值作为坐标的理想值即真值,计算得到金标记坐标的误差棒见图10。
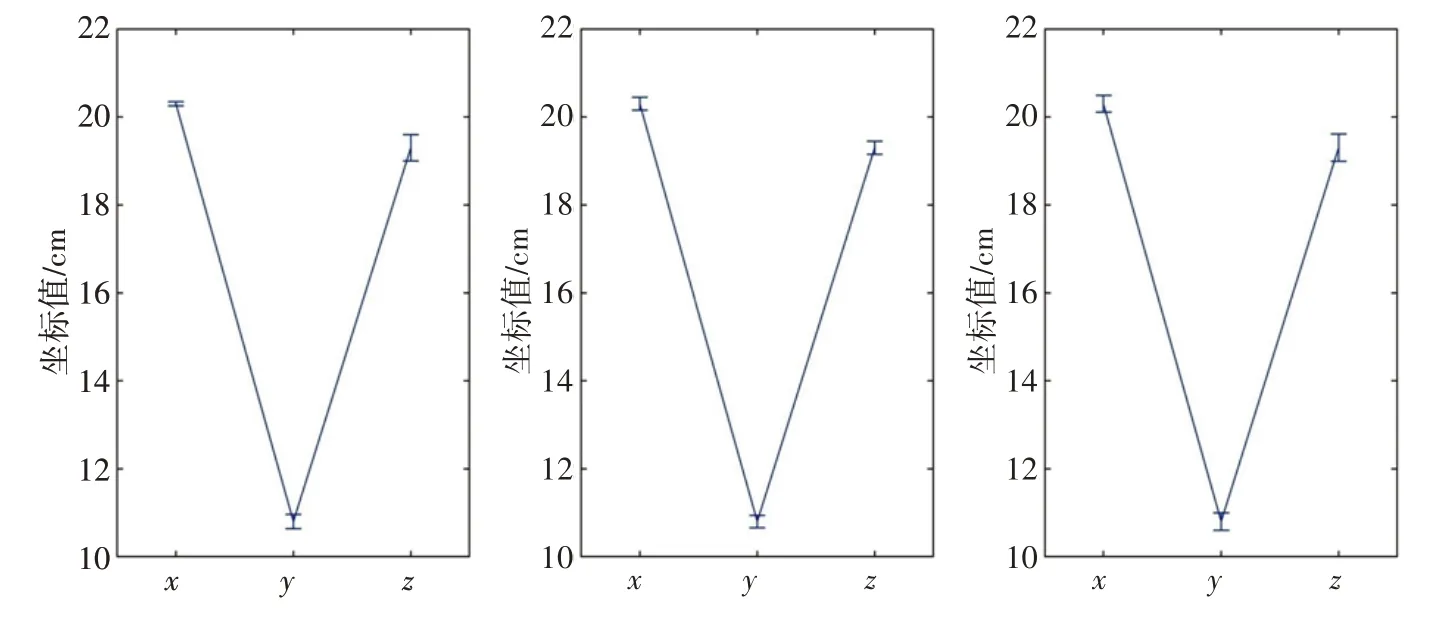
图10 3次平移金标记坐标误差棒Figure 10 Error bars after triple translations of golden markers
3 结论
本实验共用了3枚金标记,从它们成像之后得到的kV-X 射线零度投影图像中提取到的2D 坐标值较为稳定,当金标记处于合理间距的对称位置时,2D坐标投影值易被读出(图7)。如图8 中3D 坐标的重建值所示,坐标读取重建的重复性较好。将3D 坐标的重建值与标准值进行比对,两者误差计算结果如图9所示,显然,总体上可以获得较好的3D 坐标重建精度,在实验中所使用个人电脑的配置为i5-4210U 的CPU,从获取金标记2D坐标到重建金标记空间3D坐标只需要毫秒级别的处理时间。
同时,本实验发现2D坐标的微小位移会对3D坐标的前后方向重建坐标数值(z)产生较大影响,这就意味着如果容许3D 坐标前后方向有误差产生,那么使用圆柱形(如2 mm×3 mm)的金柱是比较理想的。
实验预设定中心点Iso到探测器的距离为40 cm,随着此距离的缩短,理论上需要更远的靶间距才能成功分辨探测器上金标记的投影点,本实验仅探究了放射源到探测器距离设定为定值140 cm 的一种情况,其它非140 cm的情况仍需进一步实验。
为了模拟双靶点X 线球管进行金标记成像的效果,本实验采用将打入金标记的模体进行前后对称平移采集零度投影图像的方法来进行成像,这样会引入人为的误差,并且理想情况应当是将两次对称位置的投影图像采集到同一张胶片上,以此来探究最佳的可分辨3 mm金标记的双靶间距,但由于kV-X线单次成像的剂量较低,能得到满意成像清晰度的适配胶片难寻,故本实验选择直接用CBCT的成像装置来采集图像,之后再将对称位置采集的投影图像进行叠加,在此叠加后图像上检测金标记坐标算法实验的方法,但这样的方法引入了额外的误差,且算法无法排除。后续工作拟通过应用灵敏胶片来同时采集加速器成像下的金标记的投影来重建坐标的实验方法,以避免额外误差的引入。