无人机载光电吊舱视轴横滚角计算及消旋仿真
2022-10-08魏志强轩新想张玉方
唐 文,魏志强,轩新想,张玉方
(中国电子科技集团公司第三研究所,北京 100015)
0 引 言
随着航拍无人机和云台技术的不断发展,使用无人机搭载光电吊舱对目标进行侦察和监视的应用场景越来越多。为了实现对目标的全天候监测和精确定位,光电吊舱需要搭载可见光电视、红外热像仪、激光测距机等多种光电探测器。考虑到尺寸和重量的限制,这种搭载了多个光电探测器的吊舱大多采用两轴结构。由于两轴结构在横滚方向没有姿态补偿,当无人机姿态改变时,会在吊舱视轴产生横滚角度分量,致使观察到的图像相对于水平面发生倾斜,影响对目标的观察和判断。为了消除这种倾斜现象,一般采用图像消旋的办法。常见的图像消旋方法有物理消旋、光学消旋及电子消旋等[1-3],需要使用姿态传感器(陀螺仪、倾角仪等)获取视轴的横滚角,再使用图像变换的办法对图像进行处理[4]。对于没有在横滚轴布置姿态传感器的吊舱,无法直接获取视轴横滚角,但可以根据飞机和吊舱的空间姿态关系,间接获取视轴横滚角[5]。本文基于多旋翼无人机和光电吊舱的空间姿态关系,建立了两轴光电吊舱视轴横滚角计算数学模型,使用MATLAB软件编写了视轴横滚角计算程序,分析了图像旋转角与无人机和吊舱姿态角的对应关系,使用三维建模渲染软件Blender建立了无人机搭载光电吊舱侦察的虚拟仿真环境,实现了光电吊舱图像消旋的虚拟仿真,验证了视轴横滚角计算模型及计算程序的有效性。
1 光电吊舱视轴横滚角计算模型
消旋正向选择一般有“向上标准”和“向前标准”[5],本文的消旋正向标准使用“向上标准”,即天在上地在下,适于目标画面在地平线附近的情形。坐标系以大地为基准,使用东北天坐标系,X轴指东,Y轴指北,Z轴指天。
无人机(Drone)坐标系及姿态角定义如图1所示。X轴指向无人机前方,Y轴指向无人机左侧,Z轴指向无人机上方。无人机相对大地的姿态角为,横滚角(RollD)绕X轴,俯仰角(PitchD)绕Y轴,方位角(YawD)绕Z轴。

图1 无人机坐标系及姿态角
吊舱(Turret)基座与无人机固连,其坐标系及姿态角定义如图2所示。吊舱上光电载荷的初始方向与无人机坐标系方向相同。其相对无人机的姿态角为,横滚角(RollT)绕X轴,俯仰角(PitchT)绕Y轴,方位角(YawT)绕Z轴。
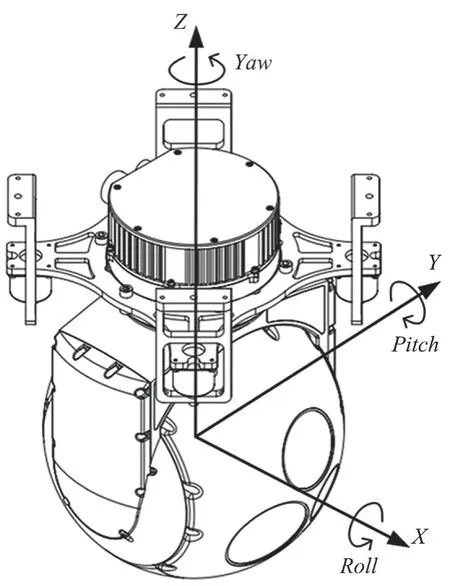
图2 吊舱坐标系及姿态角
使用吊舱坐标系中三个相互垂直的单位向量iT,jT,kT表示吊舱光电载荷的三个轴向,其中,iT为光电载荷视轴向量,初始方向与吊舱坐标系X轴相同;jT为光电载荷侧向向量,初始方向与吊舱坐标系Y轴相同;kT为光电载荷垂向向量,初始方向与吊舱坐标系Z轴相同。在吊舱坐标系中的表示如下:

采用欧拉角法求解光电载荷在无人机和大地坐标系下的姿态角。吊舱坐标系到无人机坐标系,分别绕吊舱X,Y,Z三个轴旋转的姿态变换矩阵为

无人机坐标系到大地坐标系,分别绕无人机X,Y,Z三个轴旋转的姿态变换矩阵为

将吊舱坐标系中的光电载荷方向向量变换到大地坐标系中,可以得到光电载荷三个轴向向量iT,jT,kT在无人机姿态(RollD,PitchD,YawD)和光电吊舱姿态(RollT,PitchT,YawT)共同作用下的大地坐标系中的表示iG,jG,kG。
我的老姐姐知道我们的事,并没有责怪老伴,反倒说我。在她看来,我和老伴并不般配。老伴大学毕业,原来是企业的领导,人长得也精神,有些内向;而我初中毕业,后来进城也是靠老伴才找到的工作,说话办事风风火火的。姐姐还埋怨我那去世的老妈妈,说老妈妈当时看男方的条件好,仗着是老邻居,硬是把我们整一块去了。我的婆婆公公在家也说了算,所以,我这婚姻完全是两边老人做主的。
无人机到地面的姿态变换顺序为方位→俯仰→横滚,即Z轴→Y轴→X轴。所以无人机到地面的坐标变换矩阵为

吊舱到无人机的姿态变换顺序根据吊舱的结构形式有所不同。对于本文这种没有横滚轴的吊舱,其姿态变换顺序为方位→俯仰→横滚,即Z轴→Y轴→X轴,横滚轴用于图像消旋,相当于横滚轴在最后一级的三轴吊舱。所以吊舱到无人机的坐标变换矩阵为

综合吊舱到无人机和无人机到地面的坐标变换矩阵,得到吊舱到地面的坐标变换矩阵为

求得地面坐标系下吊舱光电载荷的三个方向向量如下。
地面坐标系下视轴向量:

地面坐标系下侧向向量:

地面坐标系下垂向向量:

视轴横滚角θ可以通过求取地面坐标系下视轴侧向向量jG与视轴水平方向参考向量τG的夹角获得。其中,地面坐标系下视轴水平方向参考向量τG使用地面坐标系下的视轴向量iG与地面法向向量nG的外积获得,τG始终与水平面平行。

则地面坐标系下的视轴水平方向参考向量为

求得视轴横滚角为

上式求得的θ范围为0~180°,无法区分视轴侧向量jG通过顺时针还是逆时针旋转到水平方向参考向量τG的方向,这里通过地面坐标系下视轴侧向向量jG的z的正负判断旋转方向,如图3所示。z为正时,视轴侧向向量在水平面上方,θ取正值,即视轴侧向量通过绕视轴顺时针旋转θ后,与水平方向参考向量方向相同;z为负时,视轴侧向向量在水平面下方,θ取负值,即视轴侧向量通过绕视轴逆时针旋转θ后,与水平方向参考向量方向相同。

图3 图像旋转角正负定义示意图
2 视轴横滚角程序计算及结果分析
根据上述计算模型,使用MATLAB软件编写图像消旋角度计算程序,实现任意无人机和吊舱姿态下视轴横滚角的计算,输出给图像处理模块作为图像消旋需要的图像旋转角度。
以无人机姿态为俯仰10°、横滚10°为例,计算在无人机姿态固定的情况下,吊舱姿态与图像旋转角度的关系,绘制关系分布图,如图4所示。从图4可以看出,图像旋转角在(-78°,136°)、(106°,136°)、(-106°,-44°)、(78°,-44°)四个位置出现了突变。这四个位置对应吊舱视轴向量与地面法向向量平行的四个位置。吊舱俯仰运动越过此位置时,视轴水平方向参考向量的方向发生翻转。由于图像旋转角是基于视轴水平方向参考向量计算的,所以计算得到的图像旋转角度也发生了180°的翻转,这是使用“向上标准”时会发生的现象。另外,在吊舱方位角136°和-44°附近,是图像旋转角θ定义正负转换的位置,所以吊舱方位角越过此处时,图像旋转角的正负符号会发生改变。

图4 吊舱姿态与图像旋转角度关系图
需要说明的是,这里给出了吊舱全部姿态角(方位角-180°~180°、俯仰角-180°~180°)下的图像旋转角分布,实际使用时,吊舱方位角的转动范围是n×360°,俯仰角的转动范围在-60°~120°,一般俯仰角超过45°画面中就不会出现地平线了,不需要进行“向上标准”的图像消旋。
以吊舱的姿态为方位10°、俯仰10°为例,计算在吊舱姿态不变情况下,无人机姿态与图像旋转角度的关系,绘制曲线如图5所示。从图5可以看出,图像旋转角在(-50°,77°)、(130°,103°)、(-41°,105°)、(139°,-75°)四个位置出现了突变,这与图4中的图像旋转角度出现180°翻转的原因相同。与无人机姿态固定时图像旋转角的符号正负转换位置仅受吊舱方位角影响不同,当吊舱姿态固定时,图像旋转角的符号正负转换的位置同时受无人机俯仰和横滚姿态的影响。

图5 无人机姿态与图像旋转角度关系图
通过以下几个特定位姿的算例,可以更好地说明无人机和吊舱的姿态对图像旋转角的影响规律。各特定位姿对应的吊舱姿态角如表1所示。

表1 特定位姿的吊舱姿态角
图6给出了无人机俯仰角0°不变,仅进行-30°~30°横滚运动时的图像旋转角变化趋势。从图6(a)可以看出,当吊舱的方位角和俯仰角为0°时,图像旋转角度随无人机横滚角度线性变化。当吊舱方位角为0°、俯仰角增大时,图像旋转角度与无人机横滚角开始呈现非线性关系,吊舱俯仰角越大,相同无人机横滚角下对应的图像旋转角度越大。当吊舱方位角为0°、俯仰角为90°时,图像旋转角在无人机横滚角0°左右出现阶跃,这是采用“向上标准”进行消旋时会出现的现象。从图6(b)可以看出,当吊舱俯仰角为0°、方位角增大时,无人机的横滚运动对图像旋转的影响越来越小。当吊舱俯仰角为0°、方位角90°时,图像旋转角保持0°不变,这是由于此时无人机的横滚运动与吊舱的俯仰运动绕相同的空间轴转动,与吊舱的俯仰运动等效,因此此时无人机的横滚运动对图像旋转没有影响。

图6 无人机横滚角对不同吊舱姿态下图像旋转角的影响
图7给出了无人机横滚角0°不变,仅进行-30°~30°俯仰运动时的图像旋转角变化趋势。从图7(a)可以看出,当吊舱方位角为0°时,除了由于采用“向上标准”发生的图像旋转角180°阶跃,无人机的俯仰运动对图像旋转角没有影响。从图7(b)可以看出,当吊舱俯仰角为0°、方位角增大时,图像旋转角与无人机俯仰角呈线性关系,且吊舱方位角越大,图像旋转角越大。当吊舱方位角为90°时,无人机的俯仰运动轴与视轴重合,无人机的俯仰运动与视轴的横滚运动等效,所以此姿态下无人机的俯仰运动对图像旋转角的影响最大。

图7 无人机俯仰角对不同吊舱姿态下图像旋转角的影响
3 无人机侦察环境虚拟仿真及消旋验证
利用免费开源三维建模渲染软件Blender建立无人机和吊舱的三维模型,同时在场景的“世界属性”中导入带有地平线场景的高动态范围全景图像作为世界环境位置参考,建立无人机侦察的虚拟仿真环境,效果如图8(a)所示。通过设置场景中的“摄相机”参数模拟吊舱中光电载荷的视场,效果如图8(b)所示。Blender软件可以方便地进行无人机和吊舱的姿态变换操作,用来实现不同姿态下的图像消旋效果仿真验证。
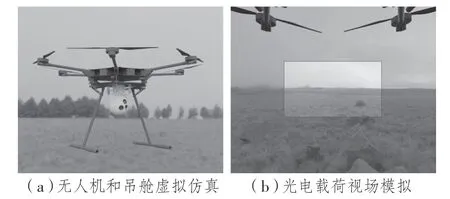
图8 基于Blender软件建立的虚拟仿真环境
3.1 无人机和吊舱的空间关系定义
利用Blender软件中的“空物体”,建立无人机、吊舱的参考坐标系,使用“移动”和“旋转”命令调整吊舱和无人机的相对位置,并在“物体属性”的“关系”中将无人机参考坐标系设置为吊舱坐标系的父级,实现无人机和吊舱空间关系的定义。同时,将无人机和吊舱的参考坐标系分别设置为无人机和吊舱三维模型的父级,建立无人机和吊舱参考坐标系与三维模型的直接对应关系,通过改变对应“空物体”的姿态,实现无人机、吊舱模型姿态的变换,并在仿真环境中直观地显示出来。
3.2 吊舱光电载荷视场仿真
利用Blender软件中的“摄像机”模块,使用其“镜头”中的“视野”定义视场角(这里设为45°),建立吊舱光电载荷的仿真视场,实现无人机姿态改变对吊舱光电载荷视场影响的仿真。
图9为无人机姿态改变前后光电载荷的仿真视场。其中,图9(a)对应无人机方位角0°/俯仰角0°/横滚角0°、吊舱方位角7°/俯仰角-1°的姿态,图9(b)对应无人机方位角0°/俯仰角10°/横滚角10°、吊舱方位角8°/俯仰角-9°的姿态。可以看出,由于无人机姿态发生改变,为了观察相同的目标,需要调整吊舱的方位角和俯仰角,尽管可以把目标放在视场中心,但由于吊舱没有横滚运动补偿,视场中的地平线有一些倾斜,需要进行图像消旋处理。

图9 不同无人机和吊舱姿态下的光电载荷视场虚拟仿真
3.3 图像消旋效果验证
按照上述仿真模型定义的无人机和吊舱姿态,使用编写的MATLAB程序计算得到图像旋转角度为-11.16°。将模拟光电载荷视场的“摄像机”进行绕横滚轴-11.16°的“旋转”操作,得到的消旋后视场如图10所示。可以看出,吊舱仿真视场中的地平线恢复水平,验证了本文建立的吊舱横滚角计算模型和MATLAB计算程序的正确性。

图10 图像消旋后的视场
使用Blender软件中的“测量”工具测量吊舱侧轴方向与水平参考方向的夹角,如图11所示,测得夹角为11.16°,与程序计算的结果一致,可以从另一角度验证本文建立的吊舱横滚角计算模型和计算程序的正确性。

图11 Blender软件中的测角结果
4 结 语
本文通过建立吊舱视轴横滚角计算的数学模型,编写了视轴横滚角计算程序,分析了图像旋转角与无人机和吊舱姿态角的对应关系,使用三维软件进行了图像消旋效果虚拟仿真,验证了数学模型和计算程序的正确性。将本程序集成到吊舱中,无需增加姿态传感器就可以获得消旋需要的图像旋转角度,可为图像电子消旋提供必要的输入参数。在实际应用时,程序需要的输入参数可以从无人机和吊舱获得,其中无人机相对大地的姿态角从无人机的惯导系统(飞控)获得,吊舱相对无人机的姿态角从吊舱的方位和俯仰测角传感器(如磁编码器、旋转变压器等)获得,通过时间统一的姿态数据计算得到视轴横滚角即图像旋转角,提供给吊舱中的图像处理单元进行处理,即可实现图像的电子消旋。
