基于改进型粒子群算法优化的塔式吊车自抗扰控制
2022-10-03康新宇刘惠康
康新宇,刘惠康,柴 琳,刘 馨
(武汉科技大学 信息科学与工程学院,武汉 430081)
0 引言
随着“中国制造2025”概念的提出,我国加快了传统制造业由数字化向能化迈进的步伐。塔式吊车是一种常见的运输工具,在现代工程生产过程中占据重要地位。塔式吊车向大型化,运行速度快速化的发展的过程中,塔吊载荷的消摆与定位问题显得格外突出,若对荷载摆动不加以限制,最终将会酿成事故。文献[1]使用拉格朗日方程建立了塔式吊车的数学模型,并设计了PID控制器对载荷进行定位和消摆。文献[2]Sun等人从实验和理论的角度出发提出了一种基于系统能量分析的自适应控制方法对塔式吊车载荷定位与消摆,取得了良好的控制效果。文献[3]丁承君等人根据未经线性化处理的塔吊数学模型,提出了一种基于改进差分进化算法优化的塔吊防摆系统,载荷摆角被有效地控制在可接受范围内,但文中未验证此方法的抗扰性能。文献[4]Zhang等人针对塔式吊车抑制载荷摆角问题提出了一种自适应积分滑模控制的方法,这种新型滑模控制方法没有切换动作,在消除抖振的同时有效地抑制了载荷的残摆。由于智能控制算法以及滑模变结构控制能够在非线性、欠驱动、强耦合的系统中展现优良控制性能,因此成为当前智能控制的研究热点之一,从文献[4~10]中的仿真结果可以看出此类控制方法能够使载荷快速且平稳地定位与消摆。文献[11]用一种基于神经网络和粒子群算法优化的输入整形方法,该方法与传统输入整形方法相比具有优越性,同时也增强了系统的鲁棒性。
上述控制方法虽然在塔式吊车的载荷定位与防摆有着良好控制效果,但是考虑到塔吊的实际运用场景的外在扰动较大,便需要一种抗扰性强且保证载荷定位防摆高精度的控制方法。另外,现有多数文献对系统进行仿真实验时没有考虑实际场景中的传感器噪声干扰对控制策略有效性的影响。
针对上述问题,本文根据自抗扰控制器抗扰动方面性能优越,鲁棒性强的特点[12,13]设计了一种基于自抗扰技术的塔式吊车防摆控制方法。由于自抗扰控制器需要整定的参数较多,各参数之间存在复杂耦合关系,导致人工整定参数困难。为了取得最佳控制效果,本文使用一种改进粒子群算法对控制器参数进行寻优整定,此算法相较于传统粒子群算法弥补了易陷入局部最优解这一缺陷,且稳定性更强。仿真结果显示,本文提出的算法优化的自抗扰控制器能够实现在噪声干扰下对载荷位移、塔臂回旋角度快速定位,同时抑制载荷摆角。
1 塔式吊车动力学模型的建立
考虑摩擦力的塔式吊车示意如图1所示。
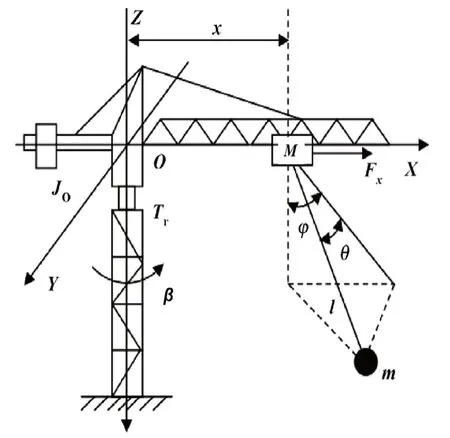
图1 塔式吊车简化模型
建模中使用的状态变量和模型参数如表1所示。

表1 系统状态变量及模型参数
考虑到塔式吊车系统的复杂度,在实际情况中载荷在平衡点附近的摆角φ以及θ的幅值不超过10°,根据数学关系,现做如下简化处理[14](对摆角φ的处理与θ一致):sinθ≈θ,sin2θ≈0,sinθsinφ≈0,cosθ≈1,cosθcosφ≈1。
根据拉格朗日方程建立的塔式吊车系统的动力学模型如式(1)所示[1]:

由(1)式整理可得:

2 塔式吊车自抗扰控制器设计
2.1 自抗扰控制器结构设计
自抗扰控制(active disturbance rejection controller,ADRC)不依赖于精准的控制对象模型,其核心思想是将系统内扰和外扰结合起来估计为总扰动,然后经闭环反馈通道在输入端补偿该估计的总扰动。自抗扰技术的关键模块有三个:微分跟踪器(TD)、非线性状态误差反馈控制率(NLSEF)、扩张状态观测器(ESO)。二阶自抗扰控制器结构如图2所示[12]。

图2 二阶自抗扰控制系统框图
根据塔式吊车的动力学方程可以看出,塔式吊车是一个两输入四输出的欠驱动系统,然而上图中的自抗扰控制系统是单输入单输出的,显然不能满足四自由度塔式吊车的控制需求。载荷的摆动是由载荷及回转摆臂的加速度引起的,因此本文使用两个自抗扰控制子模块对载荷进行定位与防摆。变幅自抗扰控制系统主要控制载荷的变幅位移e与摆角φ,回转自抗扰控制系统则控制回转摆角β与摆角θ。为了安排输入摆角与期望摆角的过渡过程,本文在每个子模块中分别添加了两个微分跟踪器。在变幅控制子系统中可以看出,非线性状态误差反馈控制率的输入端除载荷变幅误差e1及载荷变幅误差变化率e2外,再接入载荷变幅摆角误差e3及变幅摆角误差变化率e4。最后由状态观测器对误差估计补偿(回转子系统做相同处理)。综上所述,塔式吊车自抗扰控制器结构如图3所示。
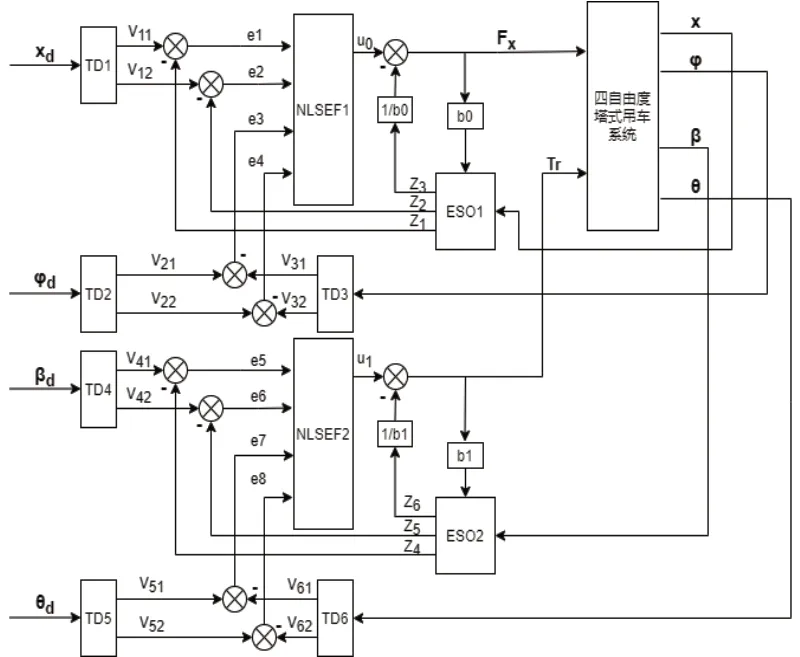
图3 塔式吊车自抗扰控制器结构图
从图3中可以看出改进的自抗扰控制器在结构上与经典结构有明显不同,且图中上半部分的变幅自抗扰控制子模块与下半部分回转控制近乎一致,区别在于各控制器的部分参数整定不同。
2.2 自抗扰控制器算法设计
上述变幅与回转自抗扰控制系统的核心是微分跟踪器(TD),非线性反馈误差反馈控制率(NLSEF)以及扩张观测器(ESO)。为了实现对欠驱动系统塔式吊车的定位与防摆控制,本文在控制器算法上做出了改进设计。本节以塔机的回转控制为例来展开本文的自抗扰控制器设计思路。
1)微分跟踪器(TD)
其离散表达如式(3)所示:

式(3)建立了离散最速反馈系统,其中最速综合函数faan(x1,x2,r1,h0,)的算法如式(4)所示:
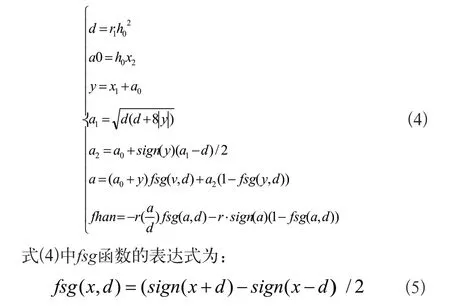
其中,h是采样周期;v(k)是在k时刻输入微分跟踪器的输入信号;r是跟踪信号的速度因子,r值过大会导致跟踪信号过快跟随输入信号,进而失去“过渡”的意义;h0是滤波因子,一般取h的整数倍,用于抑制跟踪信号中噪声。
2)非线性反馈误差反馈控制率(NLSEF)
为了减小系统的稳态误差,在平衡点附近抑制未知扰动,韩京清教授提出了一种基于PD形式的非线性组合,在本文的改进下其离散形式表示为:
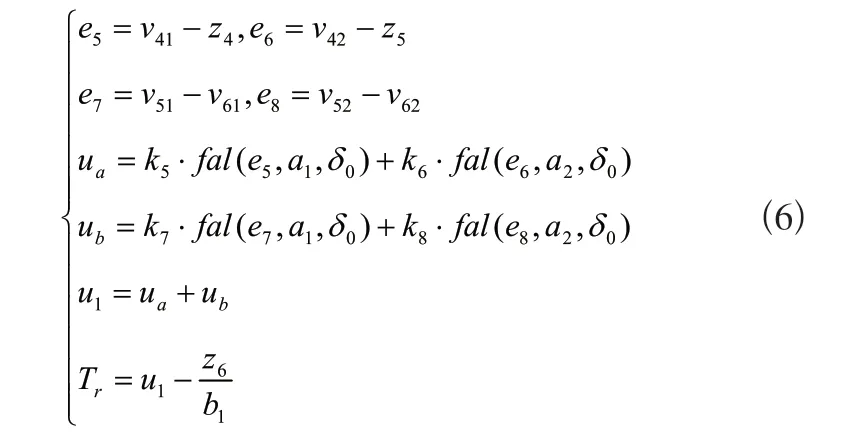
式(6)中,0<α1<1<α2;k5=kp21;k6=kd21;k7=kp22;k8=kd22,b1是补偿因子。fal是在原点附近具有线性段的连续的幂次函数,表示为:
式(7)中,δ0为线性段的区间跨度,用于消除原点附近的高频振颤。
3)扩张状态观测器(ESO)
ESO的主要作用是根据当前的塔臂回转力Tr的输入量与系统输出量塔臂回转角度β,估计出系统的总扰动并且输入到控制器用于补偿误差。图3中ESO2的表示形式如式(8)所示:
其中,β01、β02、β03是状态误差反馈的增益量,决定了ESO的收敛快慢,三者是相互制约的关系。这里为了方便后期参数的整定,文献[15]中Gao将带宽的概念引入自抗扰控制,此时β01=3ω1,β02=3ω12,β01=ω13,ω1是观测器带宽。无需调整的幂指数a01、a02、a03分别取1、0.5、0.25,这三个参数是fal函数的非线性程度的依据。δ1的作用与NLSEF中的δ0一致。
3 基于改进粒子群算法的自抗扰参数优化
3.1 粒子群算法的权重改进
粒子群算法(particle swarm optimization,PSO)是一种群集智能算法。该算法从自然规律中收到启发,模拟了鸟群觅食、寻径等行为,其应用领域不断地扩大,且在参数寻优问题中表现出色。在塔式吊车自抗扰控制器中,一部分参数是根据实际要求已预先调好并整定的,一般无需再次调整。
由上文可知在塔式吊车回转自抗扰控制器的子模块中需要对ESO2中的观测器带宽ω1和NLSEF2的补偿因子b1、非线性PD参数kp21、kd21、kp22、kd22进行整定。由于载荷位置与载荷摆角是耦合的关系,并且本文将上述两者的扰动误差视为总扰动进行消除,这里使kp21=kp22,kd21=kd22。进一步降低了回转控制器需整定参数的维度。变幅控制子模块与回转控制结构相同,因此需整定的参数有8个维度:{ω0、ω1、b0、b1、kp11、kd11、kp21、kd21}。
引入权重因子ω对速度和位置更新,其公式如式(9)所示:

式(9)中,t为迭代次数,vid(t)是粒子i在迭代t次时的速度,zid(t)是粒子i在t次迭代时的位置,c1、c2分别是粒子的自我学习因子和群体学习因子,通常在[0,2]中取值。Pi是粒子搜索到的个体最优解,而Gbest是种群最优解,r1、r2为[0,1]上规则分布的随机数,ω为权重因子。
传统的粒子群算法中,下一代种群的位置是根据上一代种群位置和下一代种群速度线性组合而决定的,然而下一代速度的又受c1、c2、ω三个参数所影响,目前学习因子c1、c2在解决低维寻优问题中被设置为常值。
但是,在迭代的后期,若权重因子取值过小就会减弱全局搜索性能反而提升局部搜索性能,粒子的收敛可能会陷入局部最优解无法跳出。为了解决这一问题文献[16]提出了一种基于权重改进的粒子群算法,该改进算法在搜索前期的权重因子下降速度较慢,提升了此时算法全局搜索性能,以便遍历更多的可行解,随着迭代次数的增加,权重因子衰减速度加快,提升后期粒子迭代向种群最优解趋近的能力与算法精确度。改进权重因子公式如式(10)所示:

式(10)中,f=πt/2kmax,ωmax=0.9,ωmin=0.4,kmax为算法中迭代次数上限。
3.2 算法流程
本文针对塔式吊车自抗扰控制器系统,根据系统特征选用如下适应度函数评价系统的性能指标(参照ITAE(integrated time and absolute error)指标):

其中,d1、d2、d3、d4为加权系数,ex、eφ、eβ、eθ分别为载荷变幅位移误差、载荷变幅摆角误差、回转角度误差、载荷回转摆角误差。
改进粒子群算法整定优化控制器参数的流程如下:
1)对粒子群的参数初始化,框定迭代次数与位置的取值范围,随机生成粒子的位置与速度。
2)将粒子群个体解码为ω0、ω1、b0、b1、kp11、kd11、kp21、kd21。
3)计算所有粒子的在ITAE性能指标下的目标适应度值。
4)将步骤3)得出的参数依次给入塔式吊车自抗扰控制Simulink模型,并根据式(11)输出适应度值。判断粒子个体的身份,返回个体最优解Pi以及种群最优解Gbest。存储上述两个变量用于后续比较。
5)依据惯性权重余弦调整的公式对粒子群惯性权重进行非线性调整,并根据更新策略计算种群速度和位置进而得到新一代的粒子群。
6)计算新种群的适应度值,用评价指标更好的新粒子顶替先前个体最优解Pi位置;再将所有粒子的适应值与种群最优解Gbest比较,取适应值小的粒子做为新的Gbest。
7)根据算法结束条件进行判断,若达到算法结束条件(低于适应度预设底线值或迭代至最大迭代次数限制)则退出算法,得到种群最优解Gbest并输出曲线,否则返回步骤5)。
使用改进粒子群算法对塔式吊车自抗扰控制器的参数优化过程如图4所示。

图4 算法优化流程
4 仿真结果及分析
本文研究的塔式吊车模型是一类欠驱动的强耦合非线性系统,为了验证本文基于粒子群算法优化的自抗扰控制理论的有效性,本文的仿真实验在MATLAB/Simulink中搭建,塔式吊车仿真模型参数如表2所示。

表2 塔式吊车模型参数
选取仿真步长为1ms,经人工充分调试整定的塔式吊车自抗扰控制器参数如表3所示。

表3 塔式吊车自抗扰控制器参数
为了测试自抗扰控制器的抗干扰能力,对变幅子系统和回转子系统加入功率为1e-9的高斯白噪声用于模拟实际传感器噪声。之后引入改进粒子群算法对自抗扰控制器进行优化。优化算法参数取值:c1=c2=1.4,粒子数规模为30,最大迭代次数为50。设置仿真时长为20s。离线运行算法,经优化后得到近似最优解ω0=3.7061、ω1=11.5677、b0=1.2773、b1=0.0251、kp11=0.0001、kd11=50.00、kp21=0.0001、kd21=26.1103。优化前后对比仿真结果如图5所示。
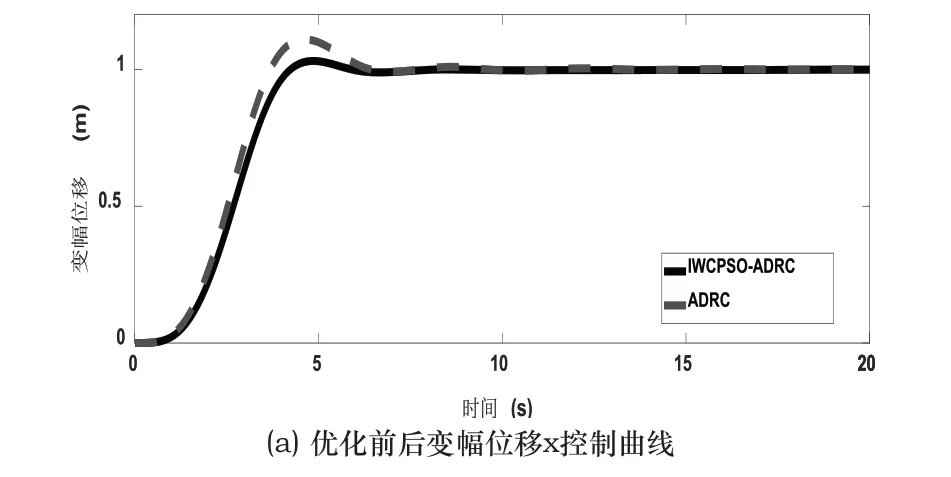

图5 算法优化前后仿真结果对比
从图5中可以看出控制器的性能得到提升。如图5(a)、图5(b)所示,载荷定位响应过程限制了超调且静态性能良好;在图5(c)、图5(d)中减小了载荷摆动幅度及消摆时间,且经优化后无明显残摆。
为体现本文提出的研究方法的说服力,将本方法与神经网络自适应控制[17]、延迟反馈模糊控制[18]对塔吊载荷的控制效果进行比较。在保证塔式吊车模型的物理参数一致的前提下,对控制对象进行算法优化控制,经充分调试后可得:
根据图6和表4的对比结果可知,本文提出的控制方法与文献[17]和文献[18]所提方法相比,本文方法在最大摆角抑制性能上均具有优越性,与文献[17]相比摆角值分别降低63%、40%;与文献[18]相比摆角值分别降低67%、55%。虽然文献[18]方法定位响应时间较短,但该方法造成的定位响应过度超调与载荷大幅摆动降低了塔吊运行的可靠性与稳定性。最后,与上述两种方法相比之下,本文控制方法稳态误差性能良好、响应过程更为平稳、系统的控制精度更佳。
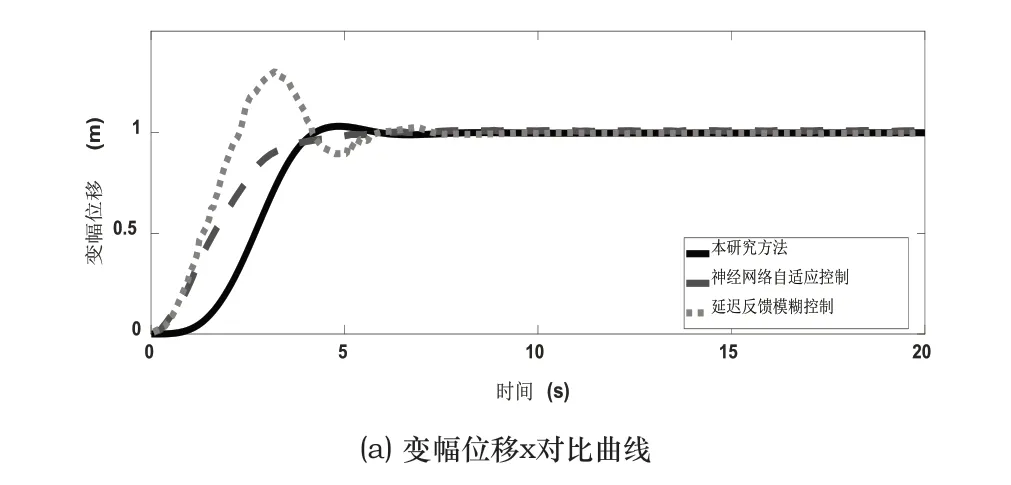

图6 文献方法与本研究方法仿真结果对比

表4 三种方法仿真结果对比分析
5 结语
本文为消除塔式吊车在运载工程中载荷的摆角同时提升载荷定位的快速性,提出了一种基于改进粒子群算法优化的塔式吊车自抗扰控制方法。该方法解决了自抗扰控制器需整定参数较多且人工整定耗时较久的问题,同时改进的粒子群算法可以防止粒子群算法陷入局部最优解的状况,提升了算法的快速性与精准度。从Simulink仿真结果中可以看出,经改进的粒子群算法优化后,自抗扰系统对塔式吊车的控制具有良好的动态响应和稳态性能,能够有效提升塔式吊车工作效率。
