航空零部件三维扫描与逆向建模
2022-09-30韩永松陈卫林
□ 张 川 □ 韩永松 □ 陈卫林 □ 陈 浩
安徽天航机电有限公司 安徽芜湖 241007
在航空维修中,零部件由于某些原因需要更换,但是没有图纸及其它技术信息,现场只有实物,想要重新制造零部件进行更换异常困难。对此,可以采用三维扫描和逆向建模。通过三维扫描仪可以在零部件上采集数据,采集的数据可以直接合并至计算机辅助设计软件中,进行额外测量和操作,生成虚拟三维模型,由此得到零部件的实物尺寸及其它技术信息,生成二维工程图,直接用于加工制造,大大缩短零部件更换周期。笔者就此对航空零部件的三维扫描和逆向建模进行介绍。
1 基本流程
航空零部件三维扫描和逆向建模基本流程如图1所示,一般分为三个阶段:扫描阶段、点云处理阶段、造型阶段。扫描阶段和点云处理阶段可能会因为点云缺陷问题而反复进行。

▲图1 航空零部件三维扫描和逆向建模基本流程
2 三维扫描
三维扫描是一项集光、机、电、计算机技术于一体的高新技术,主要用于对物体空间外形、结构、色彩进行扫描,以获得物体表面的空间坐标。这项技术的原理是局部三角形测量法,如图2所示。通过白光源将一系列格栅化光束投射到待测量物体上,用数码相机沿光束方向将这些投射到待测量物体表面上的格栅拍下来。移动格栅,投影的模式随之变化。由此,对每一张在数码相机上获得的图片都会分配一个确定的编码。对于待测量物体每一个点的三维位置,可以由目标镜头K1、K2之间的距离b,以及角α、β计算得到。
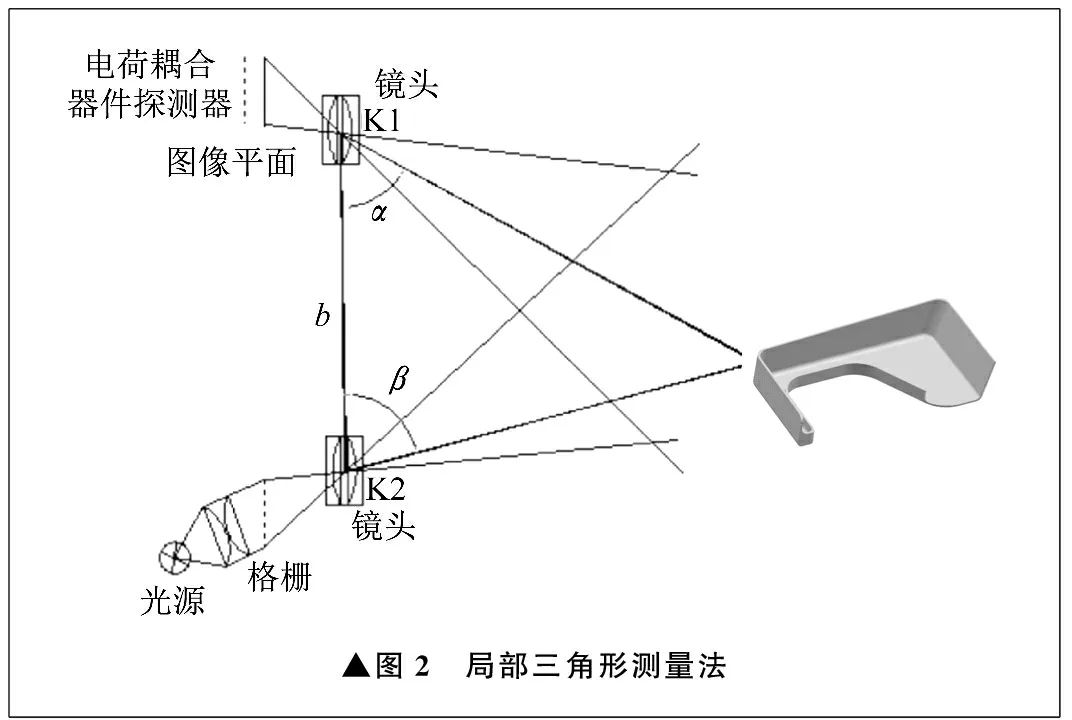
▲图2 局部三角形测量法
逆向建模的首要环节是数据采集,三维扫描获得物体表面空间坐标的过程就是数据采集,采集到的数据是逆向建模的基础。对于航空零部件,利用高精度三维扫描仪采集实物表面上的点云数据。高精度三维扫描仪如图3所示。
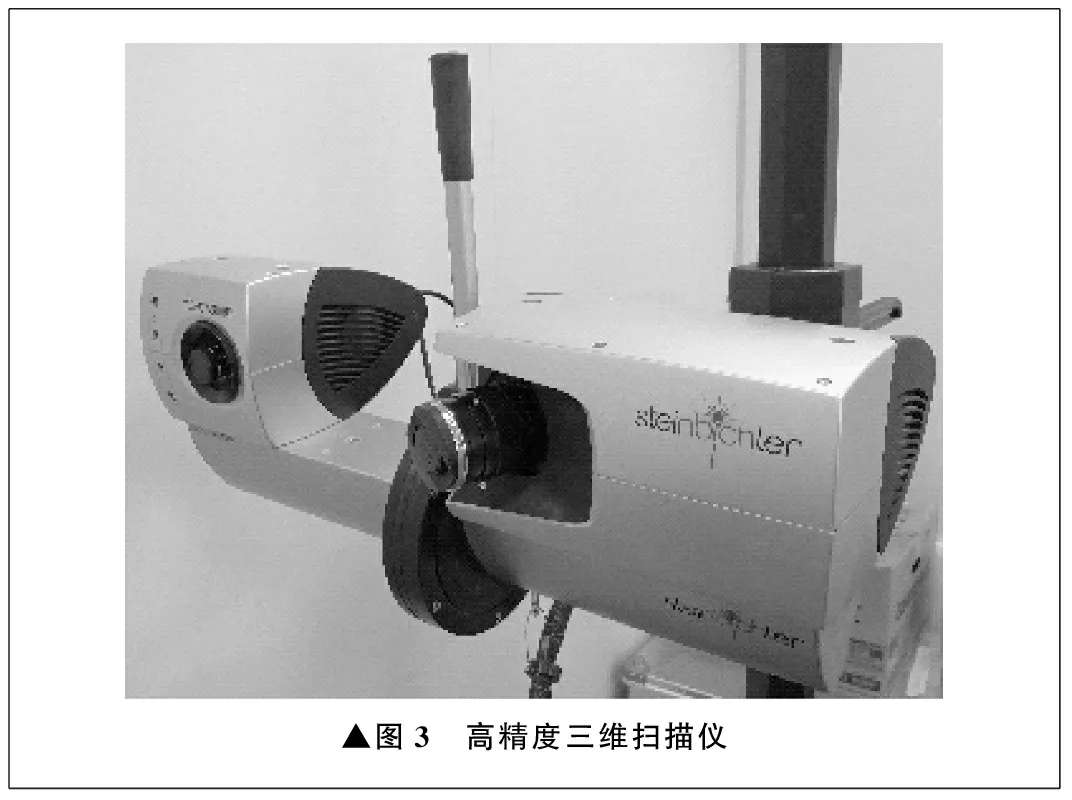
▲图3 高精度三维扫描仪
三维扫描采集数据的过程包括获取点云和点云编辑两步。
(1) 获取点云。将航空零部件实物摆放在旋转台上,将高精度三维扫描仪发出的格栅化光束投射到航空零部件表面,随后围绕航空零部件进行空间多角度扫描,生成多张点云照片,利用扫描系统点云处理软件合成点云数据。
(2) 点云编辑。合成的点云数据会存在部分无用数据及噪点,通过点云编辑功能过滤噪点,修剪无用数据,再对点云进行网格化处理,形成三角面片数据,如图4所示。
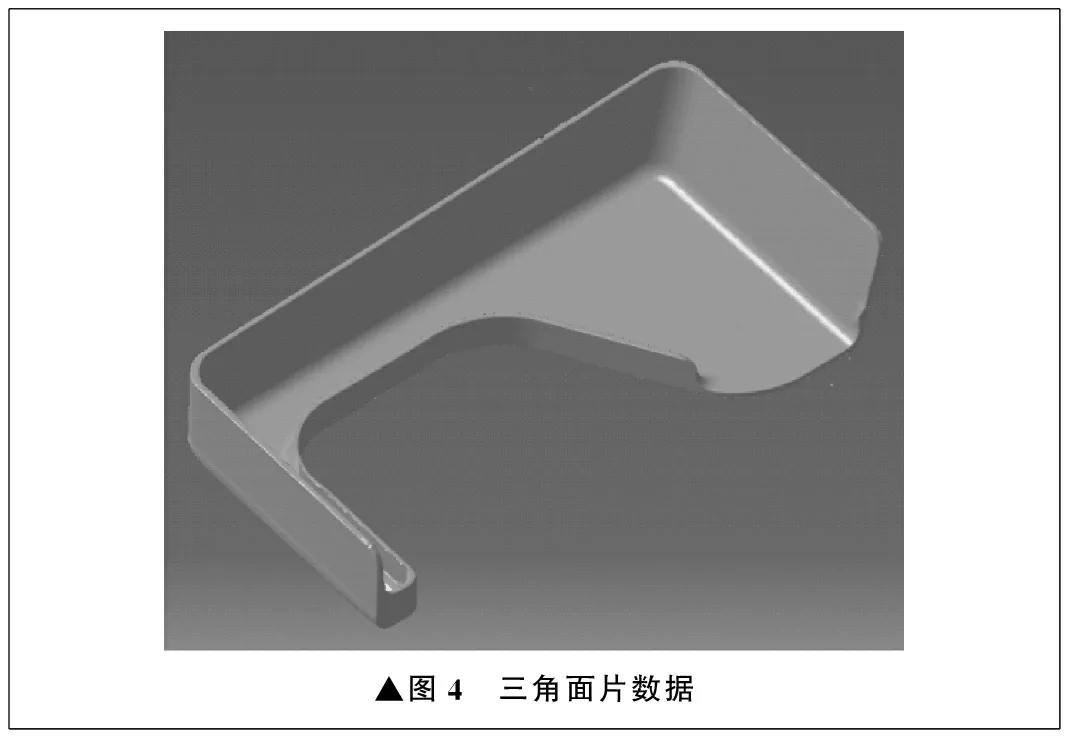
▲图4 三角面片数据
3 逆向建模
采用CATIA软件进行逆向建模。在CATIA软件的DSE模块中导入航空零部件三角面片数据,通过数据预处理、数据分割、曲面拟合和重构三个步骤实现航空零部件的快速原型设计。
具体而言,将通过三维扫描生成的航空零部件三角面片数据导入CATIA软件,分析并确定合适的造型基准,构造基准线、面,将三角面片数据摆正,为建模做好准备。以上操作完成后,利用软件平面切面扫描线等功能提取出航空零部件部分轮廓扫描线,转换为曲线,利用曲线重构曲面等元素。曲面重构如图5所示,曲面修剪如图6所示。
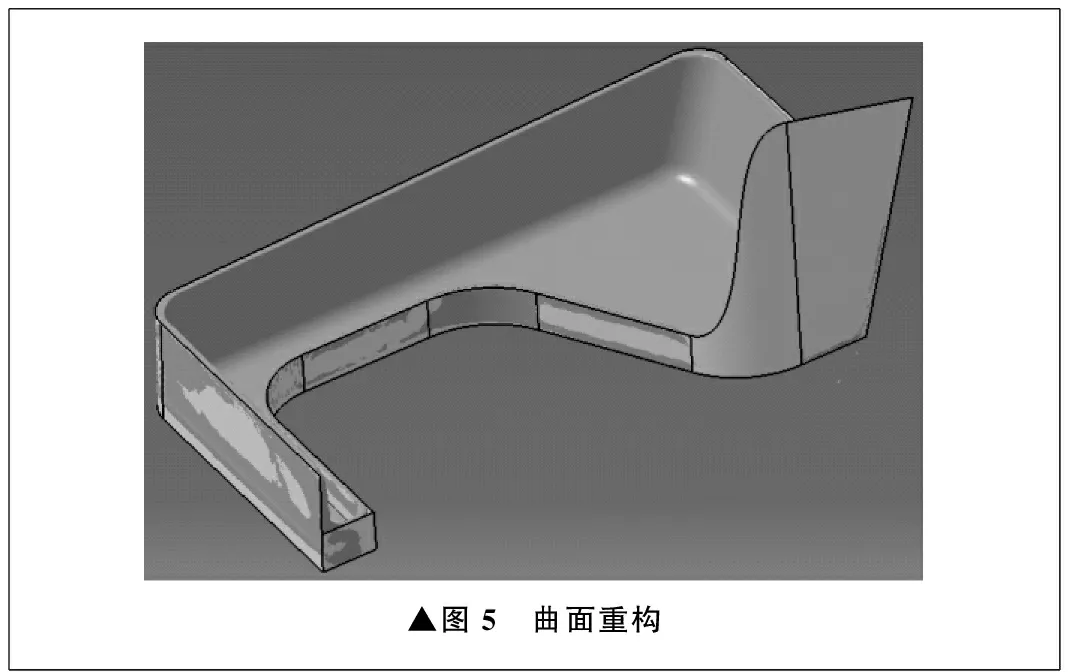
▲图5 曲面重构
▲图6 曲面修剪
4 结束语
笔者介绍了对航空零部件进行三维扫描和逆向建模的过程,可以使航空零部件实物从唯一品转变为批量品,大大降低制造难度,缩短维修周期。通过介绍可知,三维扫描和逆向建模在航空维修行业具有较高的实用价值。
