组合赋权-模糊综合评价的安全驾驶行为分析
2022-09-30张佳薇郑岳涵李明宝
张佳薇 , 郑岳涵, 李明宝
(1.东北林业大学机电工程学院, 哈尔滨 150040; 2东北林业大学土木工程学院, 哈尔滨 150040)
驾驶行为与交通安全的隐性关联是问题的核心,交通安全事故形成的多因素性、不确定性、个性化等特征为解决此类问题提出了挑战。因此,采取合理的科学方法对驾驶行为进行全面评估,不仅能够培养驾驶员的良好驾驶习惯,从而减少交通事故的发生,创造良好的交通环境,还可以为改善驾驶员的驾驶行为提出针对性意见。
对驾驶行为的研究已经成为道路交通安全的核心内容,驾驶员的驾驶行为是由车辆、驾驶员的肢体行为等因素共同作用的结果,大多数学者在研究过程中忽略了车辆属性、运行状态等因素对驾驶行为的影响。
目前,建立指标体系过于简单与求取权重方法单一是驾驶行为评估过程中存在的主要问题。石坤等[1]从车速、温度等6个方面运用层次分析法研究驾驶行为可靠度;张晓博等[2]从行驶强度、行驶效率、行驶速率三个方面,运用熵权法给予权重从而建立评价体系;许治琦等[3]从行驶里程、超速时间、危险操作等方面构建评价指标体系,运用层次分析法对驾驶行为安全性进行研究。在评估过程中将指标分为不同维度进行分析,更能突出驾驶员的驾驶行为特点,从而为改善其驾驶行为提出针对性意见。
王科银等[4]提取车辆行驶轨迹,选取具有代表性的评价指标,运用K-means聚类方法,将驾驶员的驾驶风格分为谨慎型、普通型、激进型。张志鸿[5]运用K-means聚类算法,选取平均时速、最高时速、超速等指标进行驾驶倾向性分类。利用K-means聚类的快速性与广泛性,通过行车数据对驾驶行为进行聚类分析虽然具有一定的广泛与适用性,但当指标数量过多且区间较为复杂时,K-means聚类方法无法对各特征进行准确描述。
在确定权重的过程中,不同的权重求取方法,具有不同的特点与缺陷[6],只有将主观、客观赋权方法组合应用到具体实际问题中,才能弥补单一权重方法所存在的缺陷和不足。
因此,针对上述问题,通过K-means聚类方法对准则层进行大致分析,再通过AHP-EWM(analytic hierarchy process-entropy weight method)权重计算方法与模糊综合评价方法相结合对指标层进行详细分析,进而针对目标层得出最终评估结果。通过对评估结果进行分析,进一步找出非安全驾驶行为诱因,进一步提高道路交通安全。
1 评估体系建立
交通拥堵、交通事故、空气污染和能源消耗成为全世界不断增加的问题。安全驾驶行为不仅仅关注驾驶员对车的操纵行为,还应关注驾驶行为造成的车辆的行驶工况安全问题。传统的驾驶行为评估体系大多数仅从驾驶员的不良操作[7]或仅从车因子分析驾驶员的驾驶行为[8]。为解决传统驾驶行为评估体系的不足,提升评估过程的全面性与科学性。本研究选取车载诊断设备(on board diagnostics, OBD)数据中能够科学反映驾驶员特性的7 类特征作为安全驾驶行为评估指标,其中驾驶员操纵安全维度包括速度、加速度、急加速次数、急减速次数;车辆行驶工况安全维度包括负荷计算值、发动机转速、发动机冷却液温度。兼顾驾驶员操纵安全、车辆行驶工况安全两个方面,对驾驶行为的安全性进行全面评估。安全驾驶行为评估体系结构如图1所示。
根据驾驶行为评估体系结构,通过K-means聚类法对驾驶员操纵安全和车辆运行工况安全进行大致分析,根据分类情况作为确定阈值的依据,再通过模糊综合评价方法对目标层进行评估,并提出针对性意见。使得评估过程更加科学、全面。评估流程如图2所示。
为构建驾驶员的驾驶行为评估体系提供合理的理论依据,需构建各评价指标的评价方法,如表1所示。
(1)驾驶行为操纵安全。超速行驶是各类驾驶场景下众多事故发生的直接原因,过高或过低的加速度会扰乱交通秩序,频繁的进行急加速行为会影响行车稳定性,频繁的急减速行为会增加驾驶员与乘客受伤的风险。
(2)车辆行驶工况安全。过高或过低的负荷计算值,使不完全燃烧的机油增多,形成积碳;转速过高会使车辆各个部件承受过大扭力,导致车辆安全性下降;良好的发动机水温控制对保持健康稳定的车辆状态有积极的作用。

图1 安全驾驶行为评估体系Fig.1 Evaluation system of ssfty driving behavior

图2 评估流程Fig.2 Evaluation process

表1 驾驶员安全驾驶行为指标Table 1 Drivers’ safety driving behavior indicators
2 准则层评价模型
对驾驶员操纵安全和车辆运行工况安全两个准则层进行初步分类,在初步探究两个准则层的样本分布规律,细化驾驶行为特征的同时,将分类情况作为模糊综合评价各指标阈值设立的合理依据。
2.1 评价方法
K-means算法是基于距离的聚类算法,采用距离作为相似性的评价指标[9],其基本原理是将样本集中的样本按欧氏距离判断其相似度,并划分到不同簇中,使簇间相差异度最大,算法基本流程如下。
(1)从输入的数据点集合中随机选取k个样本作为初始聚类中心C={c1,c2,…,ck}。
(2)对数据集中的每个点xi,计算它到k个聚类中心的距离并将其分到距离最小的聚类中心所对应的类中。
(3)针对每个类别ci,重新计算聚类中心:
(1)
(4)循环执行步骤(2)~步骤(3),如新的聚类中心不再移动,则终止计算;否则转至步骤(2)。
2.2 准则层分析
研究所使用到的数据是在汽车行驶时,MOBD设备检测到通过CAN总线获取的车况数据。记录每一次驾驶员行车过程数据,以单个行车过程为单位,探究得到驾驶员出现安全驾驶行为的规律性。OBD虽然具有局限性,但在广大车主中应用广泛[10]。具有成本低、获取数据多等优点且不会影响驾驶员的操作。OBD安装如图3所示,通过OBD适配器(MODB一代)接入车辆诊断座对车辆行车数据进行采集,可采集包括加速度、行驶速度等近49 个车辆运行状态数据。
驾驶员于2019年7月27日,夏季在北方某城市选取一台M1型乘用汽车完成一次行程,行驶前车辆状况正常,期间路况正常无特殊情况发生,以单次行程为单位,MODB采集设备的采集频率为每2 s采集一次,共采集748 组有效数据。数据的采集、导出过程如图4所示。
充分揣摩驾驶员的驾驶行为特征,并提出针对性意见,选择K-means聚类作为准则层评价模型,从驾驶员的操纵安全与车辆行驶工况安全两方面,将聚类数目设为3,得出两个准则层的大致特征分布如图5、图6所示。

图3 设备安装Fig.3 Device installation
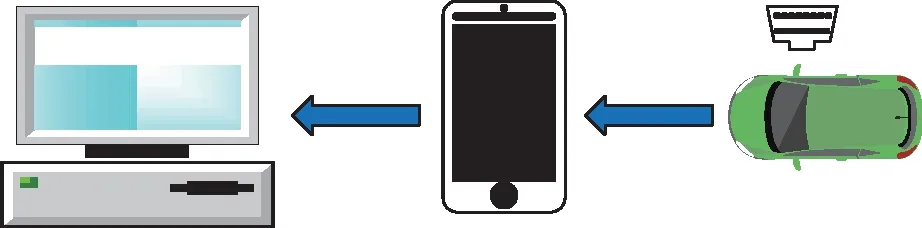
图4 OBD数据采集、导出Fig.4 OBD data acquisition and export

图5 驾驶员操纵安全聚类Fig.5 Driver manoeuver safety clustering

图6 车辆行驶工况安全聚类Fig.6 Clustering of vehicle driving cycle safety
根据聚类结果,难以得出精准的驾驶行为特征分布,但可以得到初步的驾驶行为特征,将驾驶行为分为三类。第一类速度、加速度绝对值、急加速次数、急减速次数或冷却液温度、转速、负荷计算值数值较低;第二类各指标数值较大;第三类各指标数值介于前两类之间。根据初步分类结果可以看出,在操纵行为方面与车辆行驶工况方面均存在少量样本值较大的情况。不难看出,K-means聚类分析的方法,只能将驾驶行为大致划分,难以准确根据多指标的不同特征进行准确分类,不能准确描述每类行为的具体特征。
3 目标层评价模型
通过聚类对两个准则层进行初步分析,进行大致分类,为对驾驶行为进行进一步准确分析,根据聚类结果与文献[11-13]作为设立阈值的合理依据,评价指标分级如表2所示,为对两个准则层(共7 个指标)进行总体分析,得出最终的驾驶行为性质,采用传统的评估方式很难对驾驶行为安全性进行定量和定性分析,为了对驾驶行为做出更加全面的评估,并提出针对性意见,因此本研究结合模糊综合评价,将驾驶员的驾驶行为分为安全、风险、危险三个不同等级。
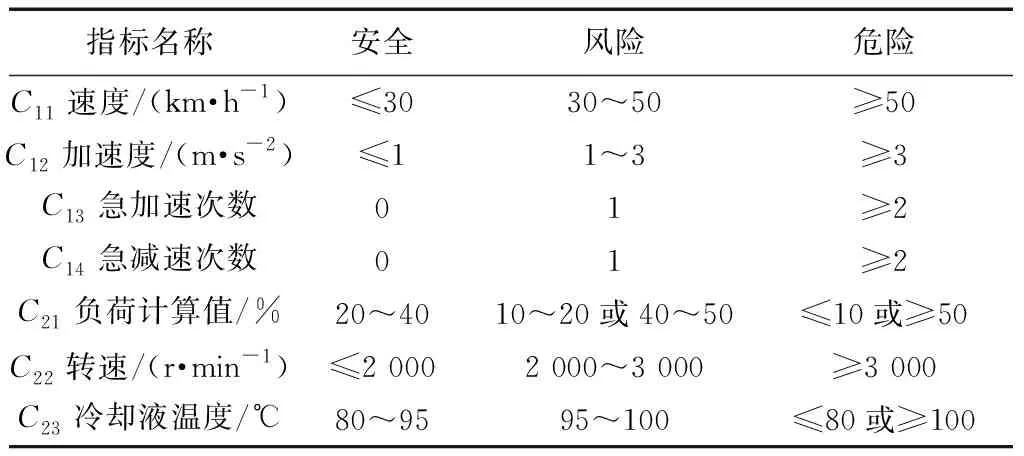
表2 评价指标分级Table 2 Evaluation index grade
3.1 AHP-EWM组合赋权
权重的求取是模糊综合评价的关键步骤,为克服主观赋权法与客观赋权法各自的缺陷,采用熵权法计算指标层中各指标的权重,以此代替专家打分构建的判断矩阵,在保留层次分析法解决多层次问题具有优越性的同时,发挥熵权法能够全面反映信息多样性的特点。在权重求取的过程中采用AHP-EWM组合赋权的方法,主要步骤如下。
(1)建立准则层递阶层次结构。
(2)采用1~9标度法构造准则层判断矩阵A,并进行一致检验,得出准则层指标权重wci。
(3)将指标层中各指标进行标准化处理,计算公式为
(2)
式(2)中:Xij为原始数据;xij为标准化后的数据。
(4)计算信息熵ei,计算公式为
(3)
(4)
式中:m为评价对象个数;n为评价指标个数。
(5)确定指标层中各指标权重,计算公式为

(5)
(6)采用和法求解出各准则层与所对应指标层的权重,根据评价体系中的递阶关系,确定各指标在评价体系中的总权重,将准则层权重与准则层下各指标权重相乘,计算公式为
fi=wciwpi
(6)
得到组合权重F=(f1,f2,…,fn)。
3.2 模糊综合评价
模糊综合评价是对受多因素影响的事物做出全面评价的一种十分有效的多因素评价方法。将一些不易定量的因素定量化,该方法系统性强,在难以用精确方法解决的复杂模糊问题上具有很大的优越性[14]。模糊综合评价主要步骤如下。
(1)确定因素集与评判集。选取7 项指标作为安全驾驶行为评价因素集,U={u1,u2,…,u7},其中,ui为评价指标。为准确反映驾驶行为安全风险等级,将驾驶行为安全状态分为三个等级,分别为安全、风险、危险,即V=[v1,v2,v3]。
(2)确定隶属度。各因素指标的隶属度通过隶属函数确定,选用偏小型、中间型、偏大型梯形隶属函数。
(3)构造评价矩阵。确定因素集对评判集的隶属度,构成单因素评判矩阵,记为

(7)
式(7)中:rij(i=1,2,…,m,j=1,2,…,n)为从被评事物的某一单因素ui看,该因素对被评结果的模糊评判集V的隶属度值。
(4)应用AHP-EWM组合赋权法确定权重集。
(5)综合评价。对于权重F=(f1,f2,…,fn),取max-min合成运算,即M(∧,∨)模型,可得综合评判向量
M=F×R
(8)
式(8)中:M(∧,∨)为主因素决定型,得出综合评判向量后,选择最大隶属度的元素所对应的安全风险等级作为评价结果。
3.3 实例分析
针对层次分析法的主观性占比因素过大和熵权法的数据间差异较小导致权重分配不合理的缺点,通过MATLAB仿真,准则层采用层次分析法(AHP),运用1~9标度法和各项研究成果中的专家经验与比较数据,在主观判断的基础上对各项评价指标进行评判,得到准则层判断矩阵及一致检验结果,运用熵权法对两个准则层所对应的指标层权重进行计算,得出各自准则层所对应指标的权重向量。即

(9)
选择一致性比例(consistence ratio,CR)为一致性检验指标,当其数值小于0.1时,认为该矩阵具有满意一致性。CR=0.03<0.1,准则层判断矩阵达到了一致性。
驾驶员操纵安全准则层与车辆行驶工况安全准则层下所对应指标权重向量分别为
Wp1=(0.31,0.09,0.31,0.29)
(10)
Wp2=(0.38,0.37,0.25)
(11)
将两者结合后得出综合权重表3所示。

表3 指标综合权重Table 3 Comprehensive weight of index
权重结果表明了驾驶人作为交通安全核心,也显示出车辆健康状况对交通安全具有一定影响,符合实际情况。
根据综合权重与参考评价指标分级建立的隶属函数,以一次行程为单位,对采集的748 组数据进行运算,通过MATLAB仿真得出的最终结果如图7所示。
最终模糊综合评价的分类结果如图8~图10所示。
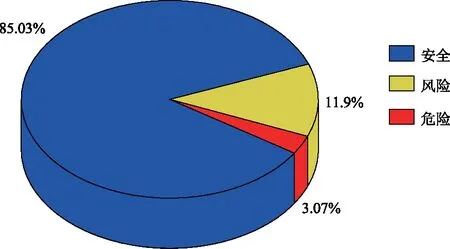
图7 驾驶行为特征分布Fig.7 Driving behavior characteristic distribution

图8 安全型驾驶行为结果Fig.8 Safe driving behavior results
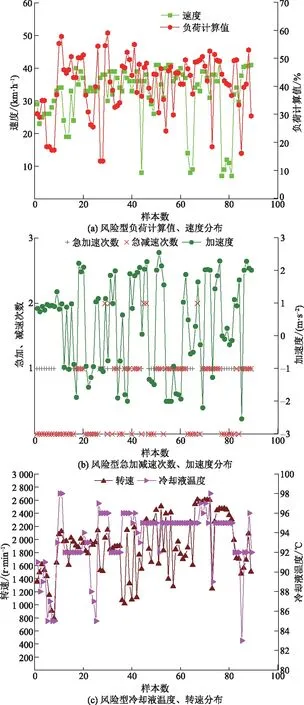
图9 风险型驾驶行为结果Fig.9 Risky driving behavior result

图10 危险型驾驶行为结果Fig.10 Dangerous driving behavior result
由图8可以看出,安全型有636 组样本,可以看出绝大部分指标均在安全阈值范围内,只有极少数指标的数值超过了安全阈值范围。
由图9可以看出,风险型有89 组样本,其中89 组样本中66 组样本的速度超出安全阈值范围,75 组急加/减速次数超过阈值,62 组样本的负荷计算值超出安全阈值范围。驾驶员应及时减少不良操纵行为,及时调整汽车发动机负荷计算值,防止风险行为进一步恶化为危险行为。
由图10可以看出,危险型有23 组样本,其中23 组样本的速度超出安全阈值范围,6 组样本的速度达到危险阈值范围,21 组样本的加速度达到危险阈值范围,23 组样本均存在急加/减速次数过多的现象,由此可见驾驶行为的危险性由驾驶员的不良操纵行为直接导致,驾驶员应该降低行驶车速与急加减速次数,使行驶过程趋于稳定,保证车辆各参数处于正常范围,从而降低驾驶危险性。
3.4 改善措施
驾驶员应该将更多精力集中在发动机负荷、冷却液温度、转速等参数的变化,并将其保持在合适的范围内,这不仅损害了车辆健康,更威胁到了驾驶行为安全性。为提高城市交通安全,保障自身和他人的利益,驾驶员要减少急加速、急减速次数等不良操作,更要时刻关注车辆运行过程中一些工况参数的变化(如冷却液温度、转速等),可以在车内增加工况参数预紧装置,这样才能全方位提高驾驶行为的安全性,降低风险性与危险性。
4 结论
(1)从监控行车数据的角度出发,选取速度、加速度、急加速次数、急减速次数、负荷计算值、转速、冷却液温度7 个评价指标,通过基于OBD的汽车运行状态参数采集数据,全面考虑交通事故的起因与影响驾驶行为的因素,因此在驾驶行为评价中具有广泛的实用性。
(2)运用K-measn聚类分别从驾驶员操纵安全和车辆运行工况安全两个方面对驾驶行为进行聚类分析,将驾驶行为进行大致分类,结合分类结果设立合理阈值,运用模糊综合评价方法,通过7 个指标,结合驾驶员操纵行为与车辆运行工况两个方面对驾驶行为进行总体评估。
(3)为了克服单一赋权方法的缺陷,采用AHP-EWM求取指标权重,一定程度上减少主观因素的影响,客观反映各评价指标间重要程度关系,增强结果的科学性。为驾驶行为评估提供了一种新的思路。
