永磁同步电动机位置伺服系统的自适应神经网络控制
2022-09-29于洋,吴峰,王巍
于 洋, 吴 峰, 王 巍
(辽宁工业大学电气工程学院,锦州 121001)
0 引言
永磁同步电动机结构简单、可靠性高、效率高,已广泛应用于工业机器人、半导体制造系统和机床加工等领域中[1]。永磁同步电动机是一个典型的非线性、多变量、强耦合系统,导致传统的矢量控制方法往往不能满足要求。文献[2]基于反馈线性化设计,将反步递推控制应用于永磁同步电动机伺服系统,但是控制算法忽略了参数变化和外部负载扰动等不确定因素对控制性能的影响。为此,一些先进的控制方法,包括自适应控制、自抗扰控制、滑模变结构控制等应用到永磁同步电动机伺服系统的控制中[3–7]。
由于神经网络/模糊逻辑系统具有对非线性系统辨识和建模能力,因此基于神经网络/模糊逻辑系统的智能自适应控制,不依赖于控制对象的数学模型,适应性和鲁棒性好,适用于解决永磁同步电动机伺服系统的控制问题[8–9]。文献[10]提出了一种自适应神经网络反步递推控制方法,能够克服不确定性因素对伺服系统控制性能的影响。文献[11–12]利用模糊逻辑系统在线估计和补偿未知函数,提出了基于自适应模糊反步递推的位置跟踪控制方法。文献[13]基于反步递推控制设计,提出了自适应模糊转速跟踪控制算法。然而,文献[10–13]提出的控制算法需要对虚拟控制信号反复求导,会出现“复杂性爆炸”问题。针对此问题,文献[14–15]通过引入滤波器估计虚拟控制信号的导数,提出了基于滤波器的自适应神经网络控制算法,克服了反步递推控制设计中存在的“复杂性爆炸”问题。然而,上述自适应神经网络/模糊控制算法在控制设计中存在代数环问题,这在控制设计中是不允许的[16]。综合上述分析,本文拟针对考虑参数变化和外部负载扰动的永磁同步电动机伺服系统,提出一种新型自适应神经网络控制算法。与现有研究结果相比,本文主要创新如下:
1) 应用神经网络基函数的本质特征,在控制设计中引入补偿项,解决现有基于反步递推的电动机伺服系统控制设计中存在的代数环问题;
2) 采用动态面控制技术设计的自适应神经网络控制算法不仅可以克服不确定性因素对系统性能的影响,而且控制器结构简单,可以提高电动机位置伺服系统跟踪误差的收敛速度。
1 问题描述
1.1 永磁同步电动机的数学模型
在假设磁路不饱和、忽略磁滞、涡流损耗的影响、空间磁场呈正弦分布的条件下,永磁同步电动机在d–q坐标系下的数学模型为
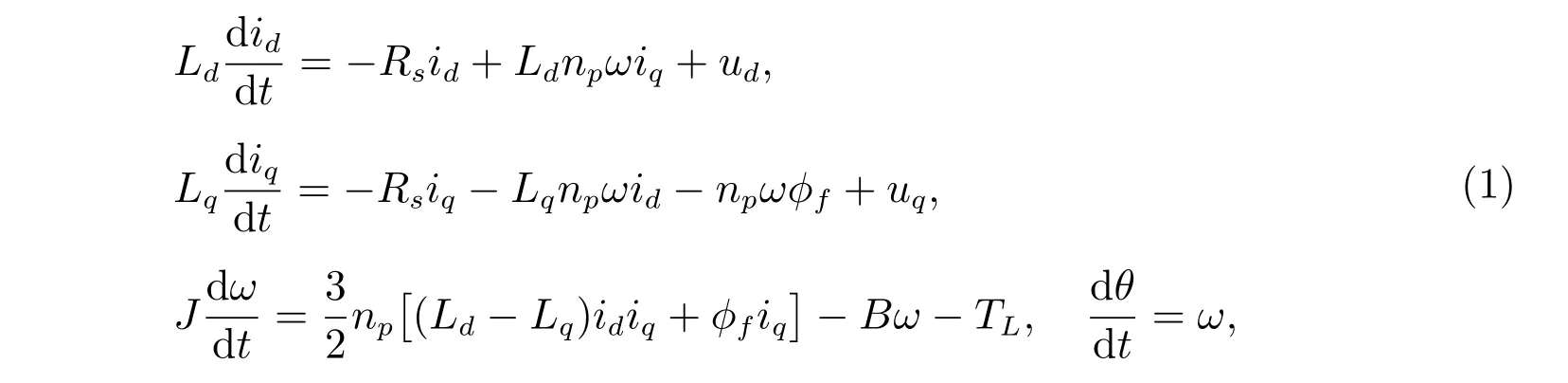
式中id和iq为定子绕组d–q轴电流,θ和ω分别为电机转子转角和角速度,ud和uq为定子绕组d–q轴电压,是系统的控制输入。其它参数定义如下:
1)Ld和Lq为定子绕组直、交轴电感;
2)np为电机极对数,ϕf为转子永磁体产生的磁势,Rs为定子电阻;
3)J为转动惯量,B为摩擦系数,TL为负载转矩。
定义x1=θ,x2=ω,x3=iq,x4=id,则永磁同步电动机的数学模型可以表示为

式中

注意到,上述模型中f1(·)包含状态变量x3和x4,f2(·)包含状态变量x4。因此,模型(2)属于非严格反馈系统。若采用传统的反步递推控制设计方法,会存在代数环问题。控制目标:对于永磁同步电动机位置伺服系统,设计自适应神经网络控制器,使其位置输出能够跟踪给定的位置参考信号xr。假设给定的位置信号二阶可导,且各阶导数有界。
1.2 RBF 神经网络
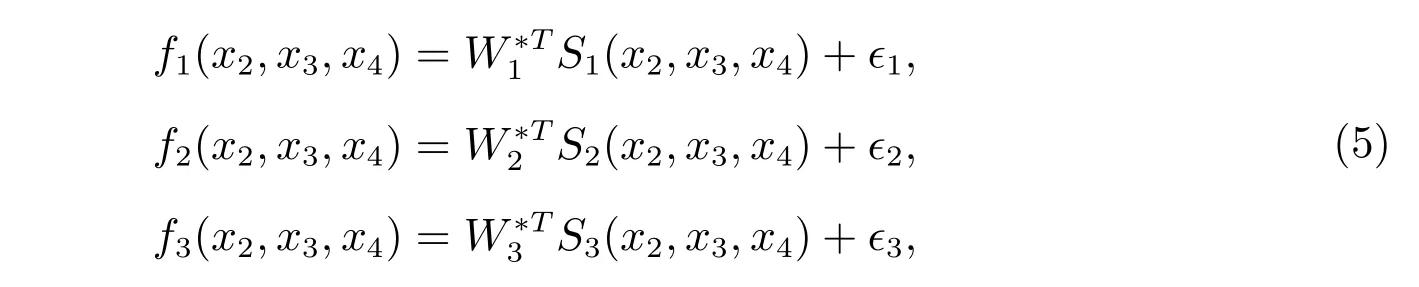
由于电动机的转动惯量、摩擦系数、负载转矩、定子电阻在运行过程中会发生变化,不容易测量。因此,模型(2)中f1(·)、f2(·)、f3(·)均为不确定非线性函数。本文利用RBF 神经网络在线辨识不确定非线性函数,对于任意定义在紧致集合内的连续函数f(x),均可以表示为

式中W∗∈Rl是神经网络的理想权值向量,S(x) = [S1(x),S2(x),···,Sl(x)]∈Rl是神经网络基函数,ϵ为最小逼近误差,l是神经元个数。S(x)通常选取为高斯函数其中χh ∈Rn,υh(h= 1,2,···,l)是高斯函数的中心点和宽度。由上式可以得到ST(x)

S(x)≤l。
根据Stone Weierstrass 逼近定理[17]:在紧致集合内,对于任意小的ϵ,一定存在足够大的l∗,使得W∗TS(x)能够以任意精度逼近函数f(x)。因此,模型(2)中的非线性函数f1(·)、f2(·)、f3(·)可以利用RBF 神经网络进行逼近,具体可以表示为
2 自适应神经网络控制设计
本节在反步递推设计框架下,针对模型(2),设计自适应神经网络动态面控制算法,实现电动机伺服系统的位置跟踪控制,具体设计过程如下。
步骤1定义跟踪误差s1=x1−xr,由模型(2)得到

设计第一个虚拟控制器

式中k1>0 是设计参数。
选取Lyapunov 函数

对其求导,并将(6)式和(7)式代入,得到

避免对虚拟控制器反复求导,产生“复杂性爆炸”问题,引入滤波器[18]

式中τ1>0 是滤波器的时间常数。
步骤2选取误差变量s2=x2−¯x2d,由(2)式、(5)式、(10)式,得到

若按照传统的反步递推控制设计,虚拟控制器将被设计为

式中k2>0 是设计参数,W1是的估计。
注意到,(12)式中包含状态变量x3和x4(步骤2 的虚拟控制器设计只能利用状态变量x1和x2)。因此,虚拟控制器x3d的设计存在代数环问题,这在控制设计过程中是不允许的。
为避免控制设计中存在的代数环问题,选取Lyapunov 函数(13)进行虚拟控制器设计
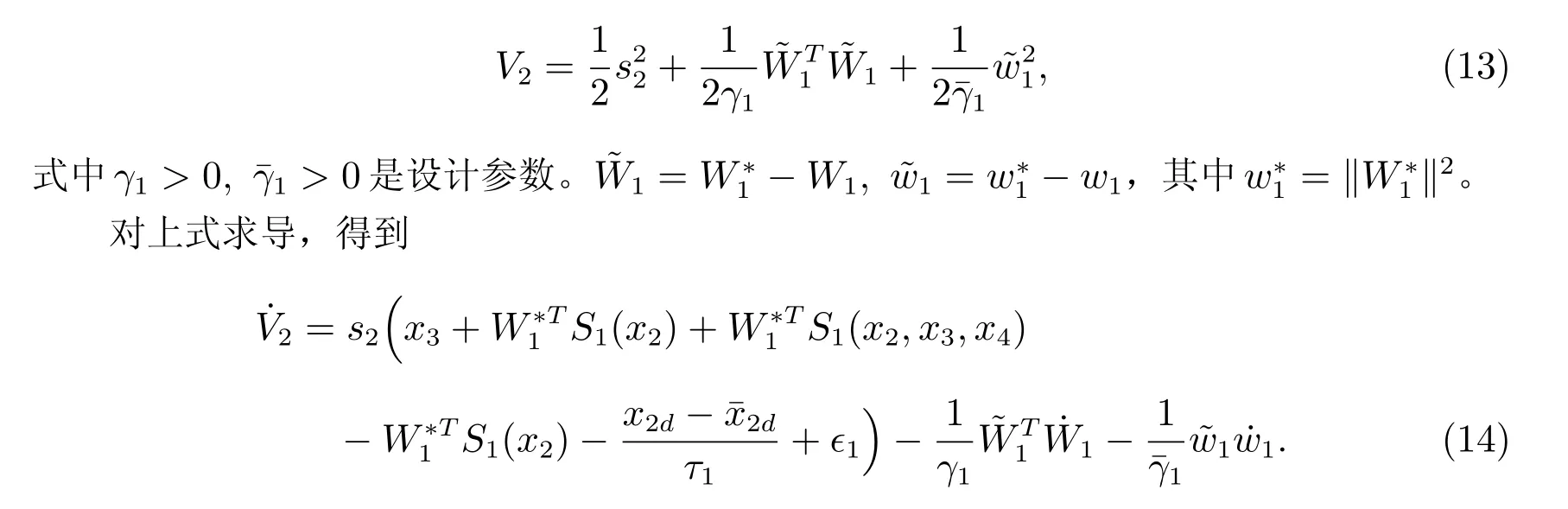
由Young’s 不等式,可得

式中ρ>0 是设计参数。
由(14)式和(15)式,可以得到

将虚拟控制器设计为

神经网络参数自适应律设计为

式中σ1>0, ¯σ1>0 是设计参数。
由(17)式和(18)式可以看出,本文通过引入与神经网络权值模相关的自适应参数设计虚拟控制器x3d,使其仅与状态变量x1和x2相关,避免了(12)式中存在的代数环问题。由(16)∼(18)式,可以得到

避免对虚拟控制器反复求导,引入一阶滤波器

式中τ2>0 是滤波器的时间常数。
步骤3选取误差变量s3=x3−,由(2)式、(5)式、(20)式,得到

若按照传统反步递推控制设计uq,仍存在代数环问题。因此,选取Lyapunov 函数

类似于步骤2 的设计过程,利用Young’s 不等式,上式可以表示为

选取实际控制器uq如下

式中k3>0 是设计参数。
神经网络参数自适应律设计为

式中σ2>0,>0 是设计参数。
由(25)式和(26)式可以看出,本文设计的虚拟控制器uq仅与状态变量x1、x2、x3相关,避免了代数环问题。由(24)∼(26)式,可以得到

步骤4定义误差变量s4=x4,由(2)式和(5)式,得到

选取Lyapunov 函数

对上式求导,得到

选取实际控制器ud如下

式中k4>0 是设计参数。
神经网络参数自适应律设计为

式中σ3>0 是设计参数。
由(30)∼(32)式,可以得到

3 稳定性分析
基于本文提出的自适应神经网络动态面控制算法,永磁同步电动机位置伺服系统的稳定性由下面的定理给出。
定理1对于永磁同步电动机位置伺服系统,在虚拟控制器(7)、(17)和实际控制器(25)、(31)作用下,并将神经网络参数的自适应律设计为(18)、(26)、(32),则闭环伺服系统所有信号一致最终有界,转子转角能够跟踪给定参考信号且跟踪误差收敛到零点的极小邻域内。
选取如下Lyapunov 函数

由一阶滤波器(10)和(20),可以推导出

其中

定义紧致集合

式中q0>0,p>0。因此M1(·)、M2(·)在紧致集Ω1×Ω2上是有界的,上界记为M1b、M2b。
对(34)式求时间导数,并将(9)式、(22)式、(27)式、(33)式、(35)式代入,得到

利用Young’s 不等式,上述不等式可以进一步表示为


式中η1>0,η2>0 是设计参数。选取设计参数,使其满足

定义

则上述不等式表示为

求解上面积分不等式,得到

当t →∞时,|s1|≤,而且通过调节设计参数,可以使跟踪误差(x1−xr)收敛到零点的极小邻域内。
4 仿真结果及分析
本节验证本文提出的自适应神经网络动态面位置跟踪控制算法的有效性。设置永磁同步电动机的参数为[1]

控制算法的设计参数选取为

每个神经网络选取5 个神经元,神经网络权值的初始条件设置为零,给定位置参考信号xr=sin(2t)rad。
仿真结果如图1 至图6 所示。永磁同步电动机的位置跟踪效果如图1 所示,神经网络对系统不确定性的逼近效果如图2 至图4 所示,系统控制输入uq和ud如图5 和图6 所示。由仿真结果可以看出,本文提出的控制算法能够保证永磁同步电动机伺服系统准确快速地实现位置跟踪控制,并且所设计的神经网络能够很好地补偿伺服系统的不确定性。将本文所提控制算法与文献[11]中的控制算法相对比,在选取相同控制增益情况下,跟踪误差的收敛速度的对比情况如表1 所示。由表1 可以看出,基于本文提出的自适应神经网络动态面控制的位置伺服系统的跟踪误差具有更快的收敛速度。

图1 位置跟踪曲线
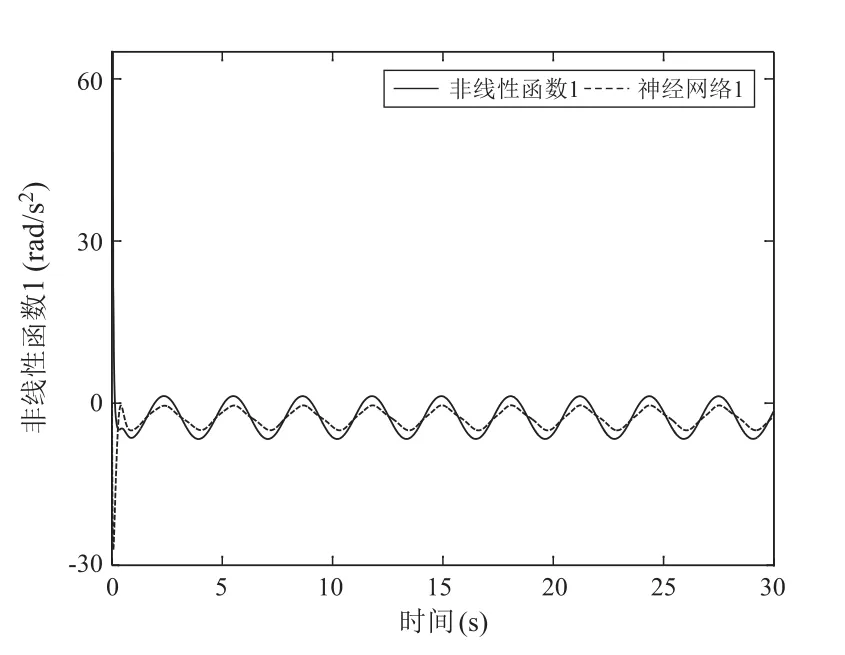
图2 神经网络1 的逼近效果
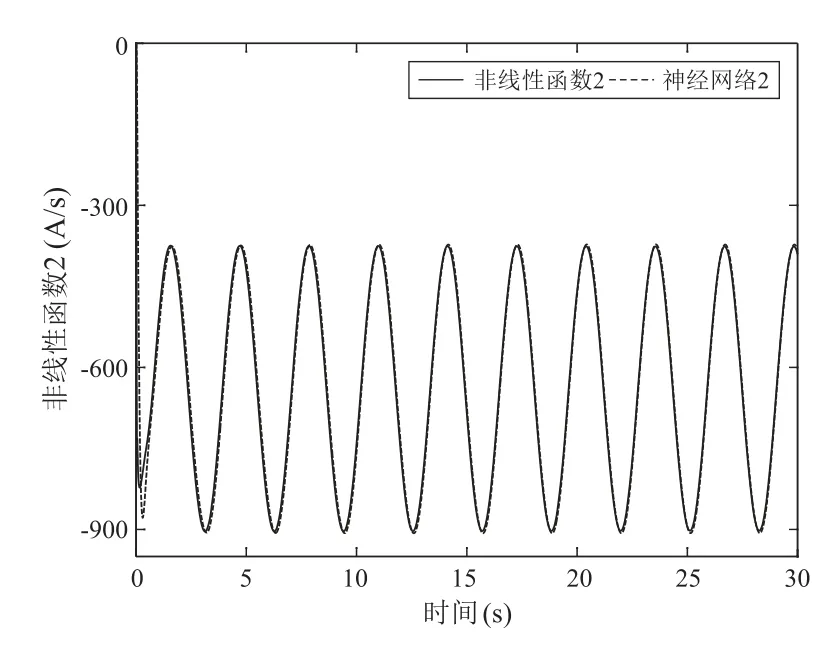
图3 神经网络2 的逼近效果
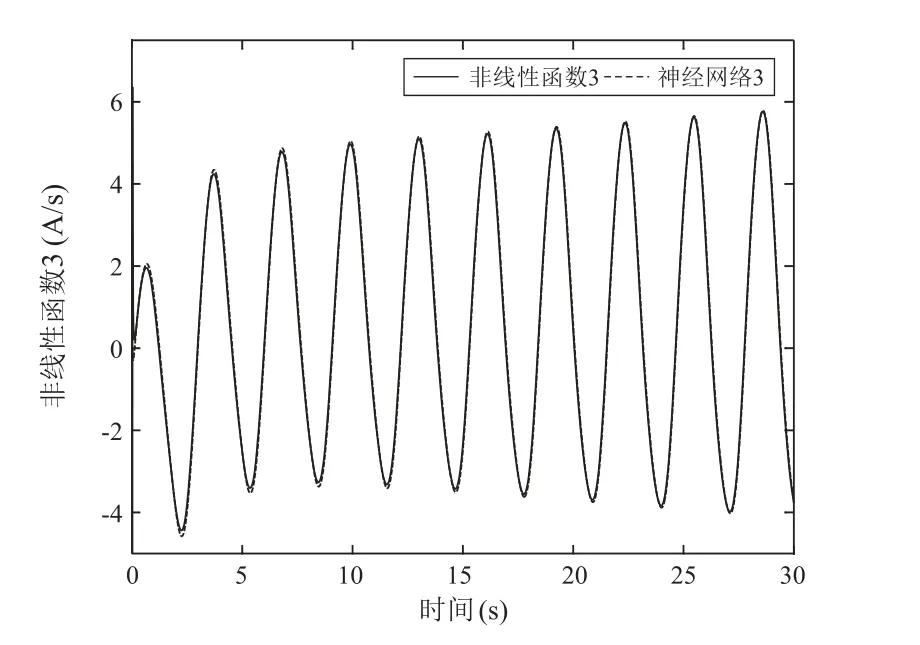
图4 神经网络3 的逼近效果
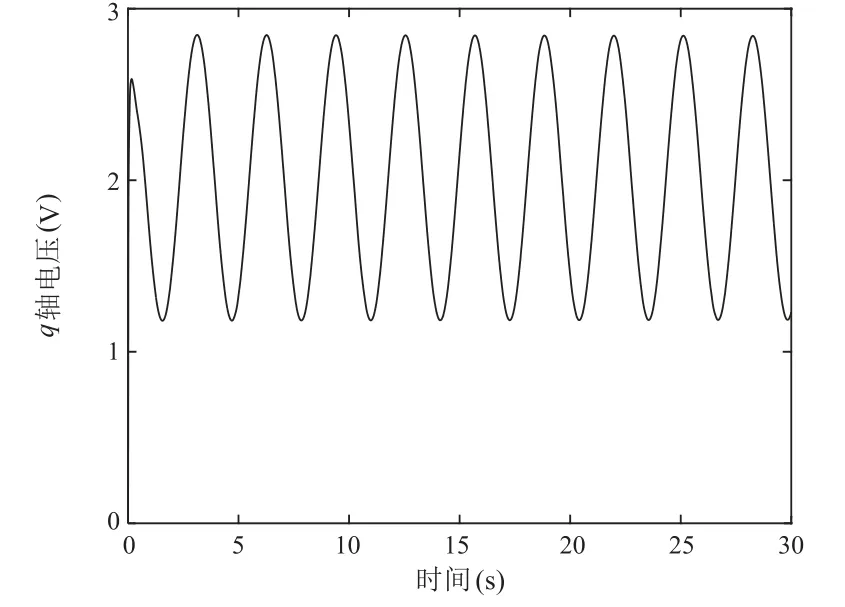
图5 控制输入uq 曲线
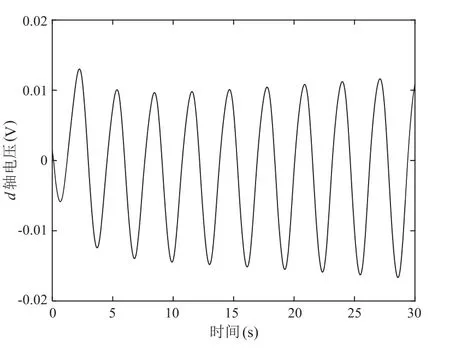
图6 控制输入ud 曲线

表1 跟踪控制性能对比(不同时间对应的|x1 −xr|)
5 结论
本文研究了永磁同步电动机位置伺服系统的控制问题。利用神经网络在线辨识、补偿系统的不确定性,并应用神经网络基函数的本质特征,设计了一种新型的自适应神经网络动态面控制算法。本文所提的控制算法避免了现有基于反步递推的伺服系统控制设计方法中存在的代数环问题,仿真结果进一步验证了基于本文控制算法的永磁同步电动机伺服系统能够准确快速地跟踪给定参考信号,且对系统不确定因素具有良好的鲁棒性。
