基于无人机高密度LiDAR点云的人工针叶林单木分割算法
2022-09-24王鑫运邢艳秋李德江赵晓伟
王鑫运,黄 杨,邢艳秋,李德江,赵晓伟
(1.东北林业大学 森林作业与环境研究中心,黑龙江 哈尔滨 150040;2.黑龙江省测绘科学研究所,黑龙江 哈尔滨 150040)
单木结构参数是反映森林空间结构的关键指标,同时也是树木生长状态观测、生物量估计等研究的重要参考依据。机载激光雷达(Light Detection And Ranging,LiDAR)作为一种主动遥感技术,受地形、光照影响较小,能够一次获取大范围地表三维结构信息,是一种重要的森林观测方法[1]。利用机载LiDAR 可以有效估测单木树高、冠幅等空间结构信息。
基于机载LiDAR 点云的单木分割是指将单个立木从较大区域遥感数据中分割出来,是单木结构参数估测的前提,如估测单木树高[2]、冠幅[3]、蓄积量[4]、生物量[5]等。目前国内外基于机载LiDAR 点云的单木分割算法有两大思路,其一为基于点云栅格化后生成的冠层高度模型(Canopy Height Model,CHM)进行单木分割。Vencent 等[6]针对图像分割场景,于1991年提出了经典的分水岭算法,分水岭算法在基于CHM 图像的单木分割场景中取得了较高的精度,后来在分水岭算法的基础上又延伸出了标记控制分水岭算法[7]。刘方舟[8]参考标记控制分水岭算法,提出了一种基于分层处理的模拟物理倒水单木分割算法,并构建能量函数进行树冠边界优化。针对CHM 灰度变化不平滑、空洞较多等问题,后来学者多利用图像滤波方法对CHM 进行处理,如高斯滤波、均值滤波、形态学滤波等。其二是直接在原始点云上进行单木点云分割。由于单木点云在空间中存在聚集性,利用Kmeans、Mean-shift、混合高斯模型等聚类算法可对点云进行有效分类。孙拱等[9]以树冠顶点为初始聚类中心,利用Kmeans 算法从机载LiDAR 原始点云中分割树冠。Hui 等[10]提出了一种基于机载LiDAR 点云数据的自适应搜索范围的Mean-shift 单木分割算法。但该种类型的分割方法处理灌丛较多、植被密度较高的林分时,林冠边缘受相邻植被影响易产生过分割现象。基于传统聚类方法进行单木分割时输入参数较多,且大多数方法速度较慢,复杂度较高,不适合大面积推广。随着人工智能技术的发展,基于区域的卷积神经网络(Region CNN)、Point-Net 等深度学习神经网络算法也在点云单木分割上取得了良好的效果。Wang 等[11]利用快速回归卷积神经网络(Faster R-CNN)对地基LiDAR 采集的橡胶林点云数据进行单木分割,效果良好。Alon 等[12]提出了一种基于深度循环神经网络(RetinaNet)的机载LiDAR点云单木分割算法,在热带阔叶树样地中取得了较好的分割成果。但基于深度学习的单木点云分割方法需要大量人工标注数据训练模型,且对于不同树种、不同地区植被,该类方法需要重新训练模型,其模型普适性较差,模型训练成本较高。
大多数基于CHM 的单木分割算法受CHM分辨率影响较大,传统机载LiDAR 往往生成的CHM 图像分辨率在0.5 m 左右,对于低矮、冠幅较小的植被分割较为困难[13],整体分割精度受CHM 分辨率限制。高分辨率CHM 图像可极大提高单木分割精度,而高分辨率CHM 图像需要高密度LiDAR 点云数支撑。由于高分辨率CHM 图像对单棵立木信息表述更加丰富,因此CHM 图像中单棵立木树冠内部存在更多凹点,且树冠边缘更加不规则。传统分水岭算法直接处理该种类似数据时会出现大量过分割现象,且针对高郁闭度林分对于树冠边界识别精度不高。针对传统基于CHM 的分割方法出现的问题,需要对高分辨率CHM 图像进行预处理,在保留有效图像信息的情况下,对图像进行一定平滑以及增强处理,因此本研究提出了一种更适用于无人机高密度LiDAR点云数据的单木分割方法。
本研究基于无人机高密度LiDAR 点云数据,分别生成分辨率为到0.1、0.2、0.4 m 的高、中、低分辨率冠层高度模型,并将图像滤波、图像增强等方法应用于3 种不同分辨率CHM 图像上,结合改进后的层次泛洪算法进行单木分割。本研究将该算法应用在哈尔滨市城市林业示范基地樟子松林、兴安落叶松林实验样地中,并针对不同分辨率CHM 图像进行单木分割,以验证不同分辨率的CHM 图像对单木分割算法的影响。
1 研究区概况与数据来源
1.1 研究区概况
本研究于2021年4月,以哈尔滨市城市林业示范基地(45°43'10″N,126°37'15″E)内樟子松Pinus sylvestris、兴安落叶松Larix gmelinii样地为实验对象,分别设置1 块样地进行无人机LiDAR飞行实验。2 块样地郁闭度均达到0.7 以上,且林下环境复杂,林分垂直层次丰富。在采集机载LiDAR 点云时兴安落叶松林正处于落叶季,其冠幅较小,而樟子松林平均冠幅较大,可以对比本算法在不同冠幅下分割效果。
1.2 机载LiDAR 数据采集
在研究区内,采用大疆(DJI)M300 无人机搭配大疆禅思L1 高分辨率激光雷达、光学镜头组合模块,于2021年4月8日,进行林地点云、RGB 光学影像数据同步采集。飞行轨迹及样地位置如图1所示。

图1 无人机飞行轨迹及样地位置Fig.1 Flight trajectory of UAV and positions of plots
具体数据参数如表1所示。

表1 LiDAR 及无人机飞行参数Table 1 LiDAR and UAV parameters
传统机载LiDAR 点云数据由于航空器飞行高度高,飞行速度快,所搭载激光雷达工作模式等原因,导致点云数据密度不够大,难以对林下环境进行精准描述。且单株立木点云数量较少,对于树高、冠幅等参数估测存在一定偏差。大疆禅思L1 遥感模块搭配大疆M300 RTK 四旋翼无人机所生产的点云数据,在多帧点云融合后密度最高处可以达到1 500 pts·m-3,其林下环境点云数据质量高于传统机载LiDAR 点云。
1.3 实地数据采集
在樟子松林、兴安落叶松林样地内,分别划分出两块30 m×30 m 样地,进行了单木位置、冠幅测量。针对点云数据,结合高分辨率光学影像数据进行目视解译,将目视解译单木位置作为算法验证数据。樟子松样地内共测得62 株单木位置信息,兴安落叶松样地内共测得85 株单单木位置信息。LiDAR 点云数据与同步采集光学影像数据如图2所示:

图2 禅思L1 采集点云及光学影像Fig.2 Point cloud and optical images produced by DJI L1
从样地尺度下观察,无人机高密度LiDAR 点云在大部分空间内密度分布较为集中,具体统计如图3所示:

图3 样地点云密度分布统计Fig.3 Density statistics of the point cloud of sample plots
从密度的分布统计图中可以发现,两个样地的点云中绝大多数区域的点密度都在100 到1 000 pts·m-3之间,其中,有50%的区域点云密度超过500 pts·m-3。另外有35%的区域点云密度在150 到500 pts·m-3之间,该密度远高于传统机载LiDAR 点云密度。
2 研究方法
首先利用大疆智图软件(DJI Terra)对激光雷达点云数据进行去噪、矫正、拼接,同时融合光学影像数据生成真彩色点云。由于大疆禅思L1 所生成的高密度点云数据形态与传统机载LiDAR 点云数据有所不同,因此根据该无人机LiDAR 点云数据形态,提出了基于冠层高度模型的层次泛洪单木分割算法。具体研究方法如图4所示
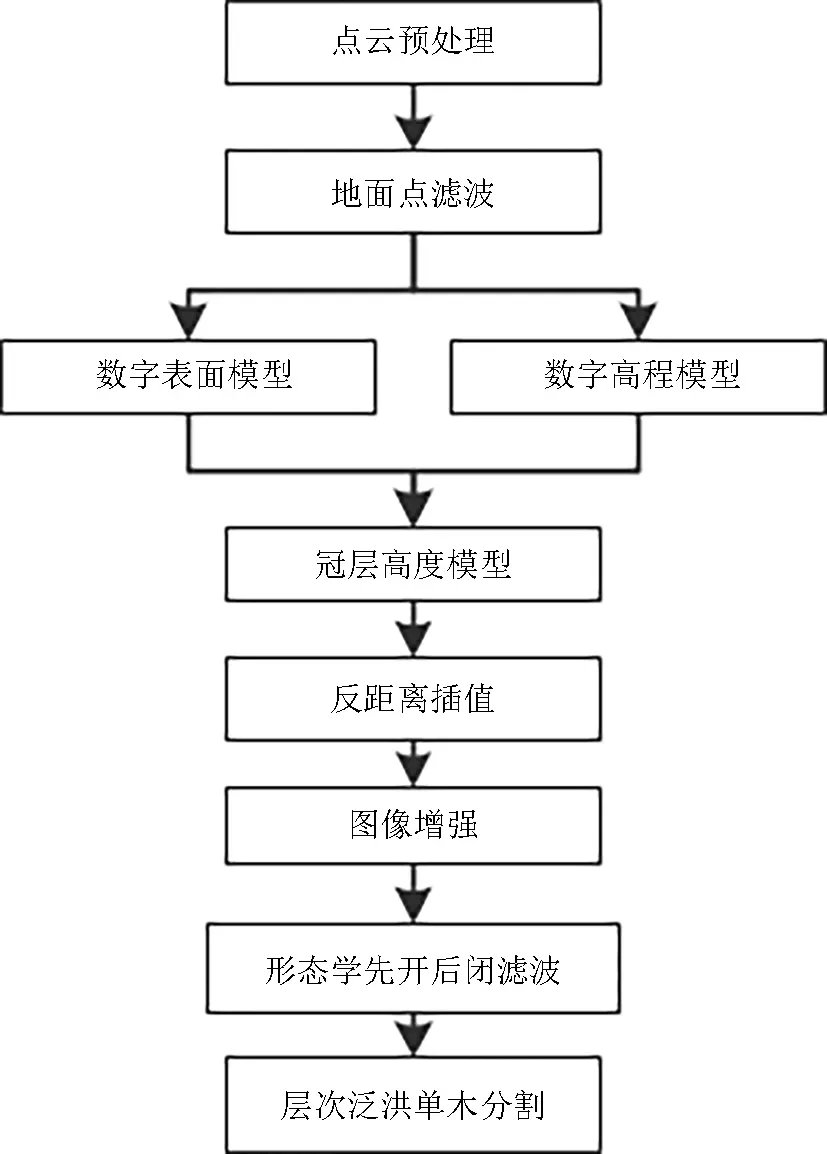
图4 算法流程Fig.4 Algorithm flow
2.1 地面点滤波
为了生成冠层高度模型,需要将点云中地面点与非地面点分离。目前,常用的地面点滤波算法包括不规则三角网滤波、自适应形态学滤波、布料模拟滤波等。其中不规则三角网滤波预设条件较多,需要大量先验知识作为算法输入。而自适应形态学滤波算法效率不高,无人机高密度LiDAR 点云数量较大,难以利用该算法在短时间内处理海量点云数据。综合考虑算法效率与滤波精度,本研究采用布料模拟滤波算法进行地面点分割。布料模拟滤波(Cloth Simulation Filter,CSF)算法由Zhang 等[14]提出,其核心思想是将点云倒置,通过模拟布匹逐渐覆盖点云的方式将地面点从原始点云中提取出来。其中,布料采用弹簧-质点模型来模拟,通过调节质点间牵引力大小来确定布料硬度以适应不同地貌。该算法精度高,需要的先验知识少,且在处理海量点云时速度较快。
2.2 CHM 生成及图像预处理
地面点分割完成后,基于地面点生成高(0.1 m)、中(0.2 m)、低(0.4 m)3 种 分辨率的数字高程模型(Digital Elevation Model,DEM),基于非地面点生成对应的3 种不同分辨率的数字表面模型(Digital Surface Model,DSM),基于上述3 种不同分辨率的DEM 与DSM,生成高(0.1 m)、中(0.2 m)、低(0.4 m)3 种分辨率的CHM 模型,然后对不同分辨率下CHM 分别进行预处理。
CHM 生成后,由于原始点云密度高,且生成的CHM 分辨率较高,上述因素会使CHM 图像产生一定噪点,且CHM 图像中单个树冠内部不同像素间高差较大,不利于树顶寻找。本研究利用形态学算法对CHM 图像进行平滑处理。基于形态学的开运算通过先进行腐蚀运算再进行膨胀运算,可以消除细小高亮区域,通过开运算可以将原本小区域重叠的树冠CHM 图像分离开。形态学闭运算则相反,其通过先膨胀再腐蚀可以填补部分空洞。形态学平滑算法本质是对CHM 图像的卷积操作,其中卷积核形状、尺寸对卷积效果影响较大,综合考虑CHM 图像分辨率与树冠形态,本研究采用正方形卷积核进行平滑滤波操作。
针对CHM 图像中产生的空洞,进行反距离权重插值(Inverse Distance Weight,IDW),以便于后续图像处理。插值完成后,对CHM 图像进行增强处理,提高对比度,便于分离不同单木树冠。
图像增强技术是先统计每一个像素值在当前所有像素中所占比例,以小于当前像素值的其他像素所占比例作为增益系数对当前像素进行增强。公式如式(1)所示:

式(1)中:Ve为增强后像素值,Vc为当前像素值,Vi为小于当前像素值的像素值,Pi为像素值所占比例,Vmax为图像中最大像素值。通过将图像增强技术运用在CHM 图像中,可以明显提高树冠间隙像素与树冠内部像素之间的对比度,有利于区分距离较近的不同树冠。
2.3 层次泛洪算法
该算法核心思想为模拟洪水流动,将CHM 图像中单木树冠个体看作山丘,而树冠之间的空隙即为沟壑,同时在多个局部最高点上开始模拟洪水向山下流动。由于洪水只能向低处流动,最终来自多个山顶的洪水在沟壑处汇聚,洪水汇聚的沟壑即为树冠分割线。具体示意如图5所示:
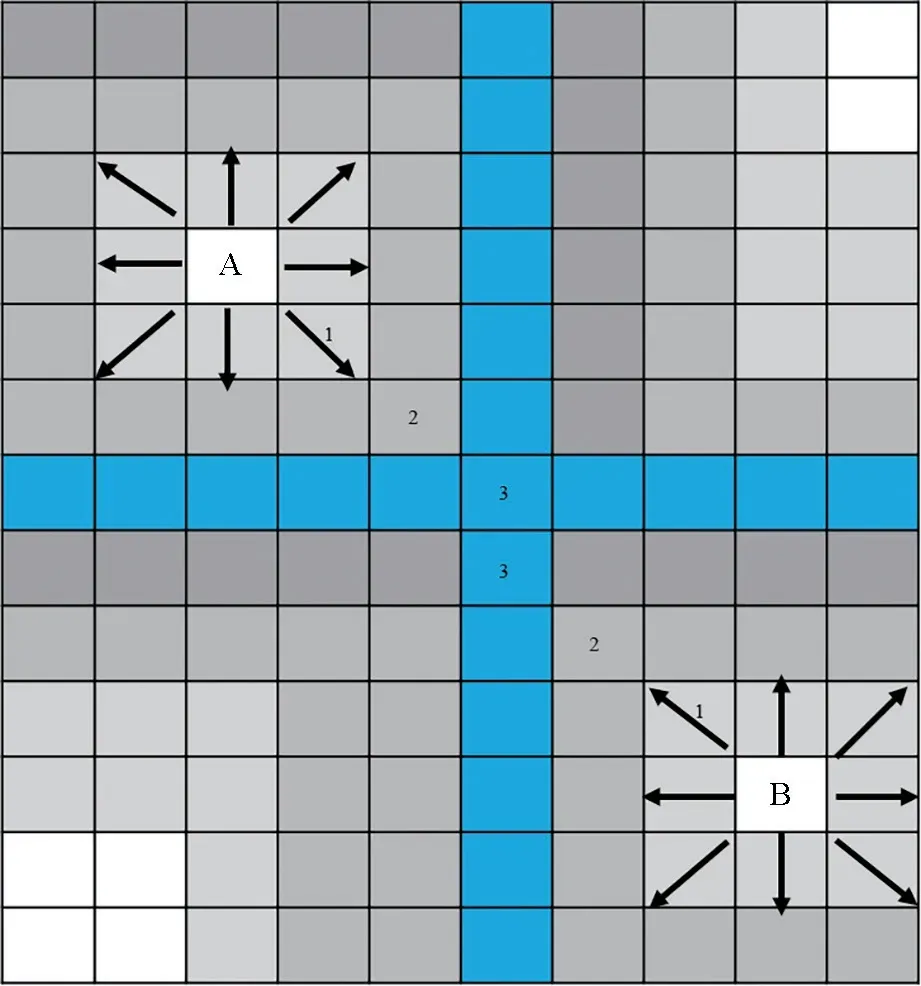
图5 泛洪算法示意图Fig.5 Diagram of flooding algorithm
图5中,A、B 两点均为山顶,即树冠顶点,蓝色区域为最终的沟壑产生地,即树冠分割线。首先基于CHM 图像,通过固定窗口大小的局部最大值算法搜索树顶,确定树顶位置后再进行层次泛洪。泛洪扩散时根据当前像素的八邻域进行搜索。为了控制不同山顶的泛洪速度保持一致,根据CHM 像素值划分为多个层次,每次都只扩散一层。当前层所有像素搜索完毕后,进行下一层扩散。下一层进行扩散时从上一层的扩散边界继续扩散。当该层次中出现山顶时,山顶优先于泛洪边界进行扩散。扩散条件如式(2)所示:

式(2)中:Ci代表当前像素的像素值,Ci+1代表待扩展像素的像素值。通常来说,CHM 图像中树冠内部各像素高度差应小于扩散边界与树冠间隙高度差,且两个树冠间的鞍部应当是树冠边界。因此当两树冠区域扩散过程中发生接触时,通过计算边界像素与两树冠区域中树冠顶点的高度差可以对当前区域是否到达树冠边界进行判别,当高度差达到最大时即到达树冠边界。当不同树顶区域扩散边界发生碰撞时,计算碰撞边界像素周围4 邻域内像素权重值W,其计算公式如式(3)所示:

式(3)中:Hk为当前像素点与树顶k之间的高度差,Hk+1为当前像素点与相邻树顶k+1 之间的高度差。边界向权重值高的像素点移动。
2.4 边界优化
由于树冠区域扩散时仅仅依靠CHM 图像像素值判断树冠边界,树冠区域形状不易控制,易出现狭长形树冠现象。因此引入树冠形状约束条件对边界扩散进行约束。
扩散区域长宽比R0:为了控制扩散区域近似于圆形,因此通过控制扩散区域的外切矩形长宽之比来使得扩散区域近似于自然状态下针叶林树冠投影形状。计算公式如式(4)所示:

式(4)中:L代表外切最小矩形长度,W代表外切最小矩形宽度。
扩散区域角形比R1:为了进一步约束扩散形状,提高分割树冠形状边界平滑度,使用扩散区域面积与外切矩形面积之比来约束扩散形状。计算公式如式(5)所示:

式(5)中:S1为外切矩形面积,S2为扩散区域面积。
最大面积约束:为了避免树冠扩散面积过大,需要对树冠扩散面积进行约束。通常该值需要根据不同林分类型来确定。
当上述3 个条件任意一个不满足时,说明当前扩散出现错误,将所有边界回退至上一层。然后调整边界扩散顺序,继续完成扩展。当该层所有顺序组合均尝试过仍然不能满足上述条件,则回退两层,依此类推。
2.5 精度评价
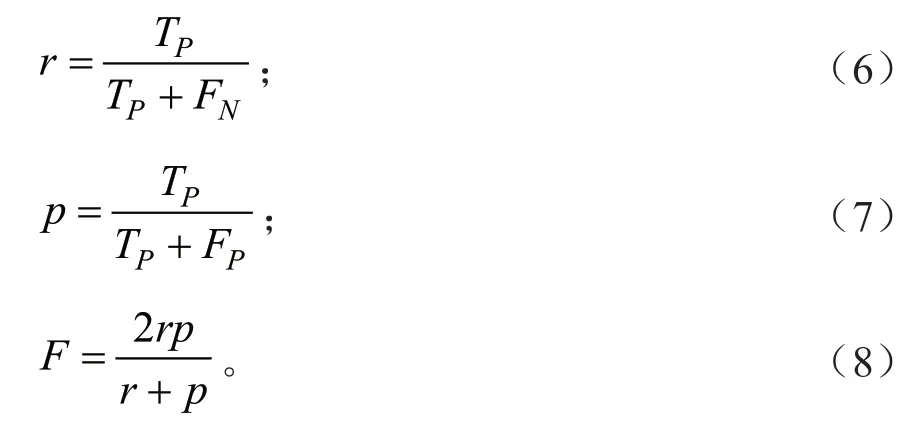
为了评价该算法在不同分辨率下分割精度,通过对高密度激光雷达点云和高分辨率光学影像目视判别的方式得到本研究的单木位置验证数据,采用正确率p、召回率r、调和值F[15]来量化评价算法精度。正确率表示有效单木探测株树占整个提取结果的比例,召回率表示有效单木探测株树占真实参考株数的比例。单木分割可以将点云分割为多棵单木点云,通过对比真实树冠投影区域与分割后树冠投影区域来判别分割正确性。其中正确分割(Tp)表示分割后投影区域占真实树冠投影区域50%以上,欠分割(FN)则相反。过分割(Fp)表示估测树冠投影区域与多个真实树冠投影区域重叠,且每个真实树冠投影区域均未占到50%以上。具体r、p、F计算如式(6)~(8)所示:
3 结果与讨论
3.1 结 果
CSF 滤波器有3 个参数比较重要,分别为栅格大小、粒子位移幅度和迭代次数。由于本研究研究区域均位于平原,综合考虑地面微弱起伏,因此将粒子位移幅度设置为0.2 m,即相邻粒子位移超过0.2 m 即视为非地面点。栅格尺寸越小,迭代次数越高,地面点分割精度越高,但计算速度也越慢。由于本研究中使用的点云密度较高,数量较大,为了将无人机高密度LiDAR 点云中地面点有效分离,综合考虑计算速度,本研究中使用的CSF 滤波器栅格大小设置为0.5 m,迭代次数300。滤波效果如图6所示:

图6 CSF 滤波算法结果Fig.6 Results of CSF filtering
地面点分割完成后,根据地面点与非地面点生成高、中、低分辨率DSM 与DEM,并进一步生成高、中、低分辨率的CHM 模型(图7)。

图7 不同分辨率下CHM 图像Fig.7 CHM images with different resolution
CHM 图像卷积操作需要设置卷积核。卷积核通常为正方形。卷积核大小应根据图像处理目的来设置,卷积核过大易导致图像局部信息丢失,过度平滑。而卷积核过小则容易导致平滑效果不明显。本研究中CHM 图像处理的目的是提高单木分割精度,因此卷积核边长不宜超过树冠冠幅,否则会导致树冠边缘信息丢失。本研究兴安落叶松样地内最小冠幅与樟子松样地内最小冠幅均大于1 m,因此统一将卷积核边长设置为最小冠幅的一半,即0.5 m。不同分辨率的CHM 图像所对应的卷积核边长栅格数需做对应计算。另外,根据形态学滤波原理,需要以边缘像素值大小为基准计算中心像素值,卷积核边长最小为3 个栅格。在设置卷积核大小时应符合上述条件,同时尽量边长接近0.5 m。以分辨率为0.1 m 的CHM 图像为例,由于CHM 图像分辨率较高,为了优化处理效果,采用的卷积核边长为5。经过形态学处理后效果如图8所示。

图8 形态学处理效果Fig.8 Results of morphology filtering
当分辨率为0.2 和0.4 m 时,根据卷积核边长最小为3 个栅格大小的条件,分别设置两个分辨率下卷积核大小为0.6、1.2 m。然后对生成的CHM 图像利用图像增强算法进行增强,图像增强后效果如图9所示。

图9 图像增强效果Fig.9 Results of image enhancement
图像预处理完成后,利用层次泛洪算法进行单木分割。垂直分割层次的设置主要受郁闭度影响。高郁闭度林分中,垂直分割层数越多,边界扩张速度越慢,单木分割精度越高,但计算效率较低。在本研究中,两块样地郁闭度均达到0.9 以上,且最大树高均达到20 m,综合考虑计算效率与分割精度,本研究将垂直层数设置为20 层,即边界每次最大扩张高度为1 m 左右,可以达到有效识别高郁闭度人工针叶林林分单木树冠边界的目的。另外,由于本研究中所使用的樟子松样地、兴安落叶松样地中树冠垂直投影形状均接近圆形,因此为了控制分割树冠形态,同时考虑树冠垂直投影形状的不规则特性,保留一定弹性伸缩余量,经过多次实验,分别测试了多种不同控制阈值,当式(4)中R0设置为2,式(5)中R1设置为1.5时效果最佳。局部最大值算法确定单木树顶时,需要根据不同冠幅大小确定搜索窗口大小。由于樟子松冠幅平均在2.3 m 左右,兴安落叶松冠幅在1.4 m 左右,因此本研究在樟子松样地内使用边长为2 m 的正方形搜索窗口,在兴安落叶松样地内采用大小为1.5 m 的搜索窗口进行局部最大值搜索。分别对不同分辨率下兴安落叶松林样地、樟子松林进行单木分割,分割结果如图10所示。
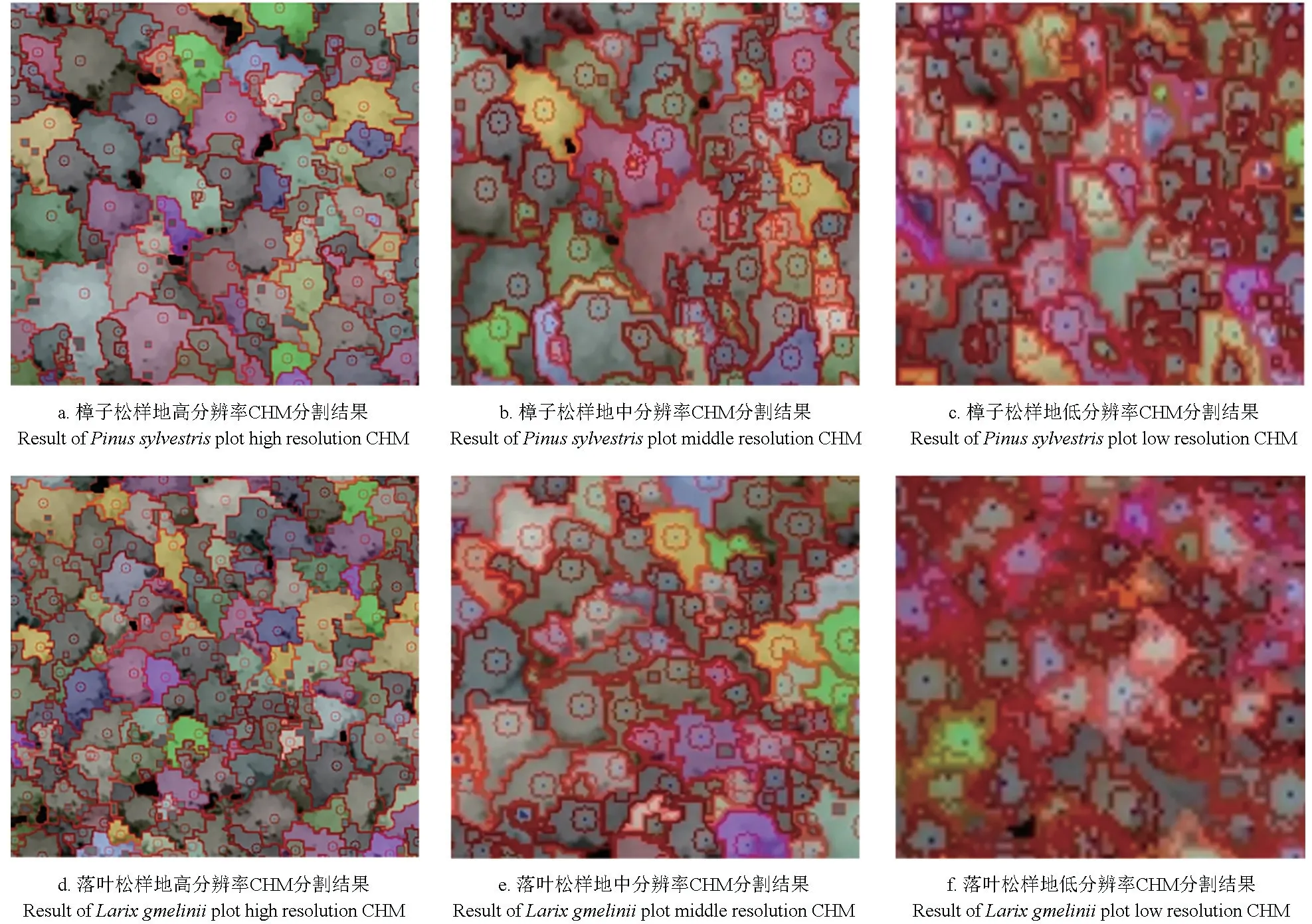
图10 不同分辨率CHM 树冠分割结果Fig.10 Single-tree segmentation of CHM with different resolution
从上述分割结果中可以直观发现,高分辨率CHM 对于冠幅较小的植被分割精度较高。低分辨率CHM 中难以有效识别冠幅较小的单木。冠幅较大的林分对于分辨率敏感性较差。具体分割精度如表2所示。
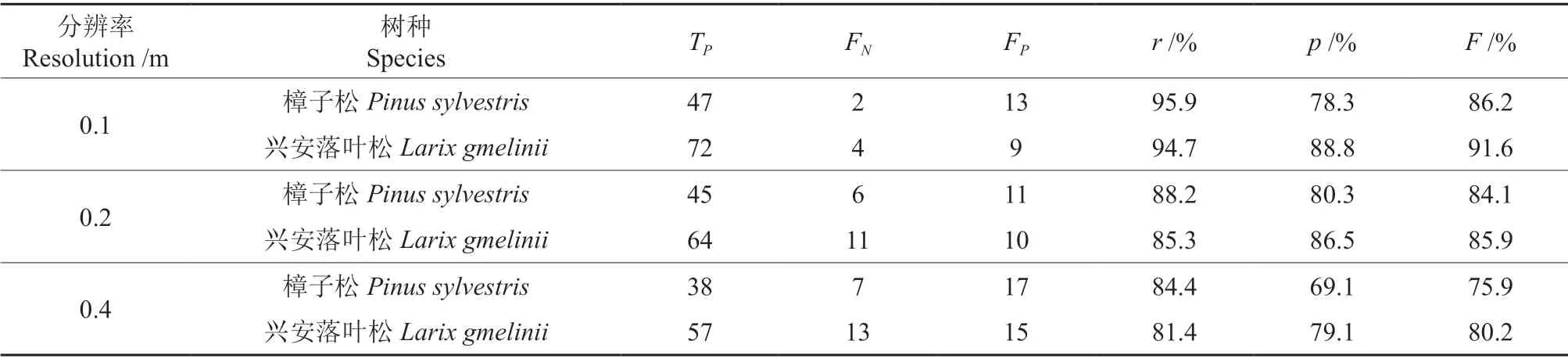
表2 樟子松林与兴安落叶松林基于不同分辨率CHM 分割精度Table 2 Comparison of accuracy between CHM with different resolution and different tree species
3.2 讨 论
从实验结果可以发现,随着CHM 图像分辨率下降,整体分割精度也在下降。由于樟子松林样地郁闭度高于兴安落叶松林样地,兴安落叶松林样地分割精度在不同分辨率下均比樟子松林样地高。当分辨率在0.1 m 时,樟子松林样地有2 株单木出现欠分割现象,兴安落叶松林样地由4 株单木出现欠分割现象。当分辨率下降至0.4 m 时,二者欠分割单木数量分别上升至7 和13 株。过分割单木数量也随着CHM 分辨率下降而上升,但上升速度相较欠分割单木数量较慢。从CHM 单木分割图像中可以发现随着分辨率下降,冠幅较小的树木识别率也在下降。
激光雷达数据采集时,兴安落叶松处于落叶期,而樟子松未落叶。由此造成兴安落叶松林样地树冠垂直投影面积普遍偏小,而樟子松林南北、东西平均冠幅均在1.5 m 以上。且该两块样地由于人工种植密度大,郁闭度均达到0.9 以上。从樟子松、兴安落叶松两类树种可以得出结论,在高郁闭度人工针叶林样地中,CHM 图像分辨率大小对冠幅较小的兴安落叶松分割效果影响较大,而对冠幅较大的樟子松分割结果影响较小。其原因在于CHM 图像分辨率越高,同一树冠所占像素数量越多,局部最大值算法越容易识别该树冠中的树顶。极端条件下,冠幅较小的树种在分辨率较低的CHM 图像中所占像素数量为0,即无法识别。从不同分辨率下单木分割结果可以发现,高分辨率CHM 有利于高郁闭度人工针叶林样地单木分割精度的提升。通常生成高分辨率CHM 需要进行插值处理,点云数据密度越高,插值数量越少,插值所产生的误差也越低。因此高密度LiDAR 点云数据是提高CHM 精度的前提。
无人机高密度LiDAR 点云数据相较于传统LiDAR 点云数据密度高数十倍,单株木点数量远高于传统机载LiDAR 点云。两者对比如图11所示。

图11 高密度LiDAR 点云与传统机载LiDAR 点云数据对比Fig.11 Point cloud by the high-density LiDAR compared with traditional LiDAR
从图11中可以明显发现高密度LiDAR 点云对于单株木描绘更加细致,尤其是树干部分,相比较于传统机载LiDAR 点云来说差距非常明显。并且从整体样地点云数据来看,无人机高密度LiDAR 点云密度分布区间较为集中,且绝大部分区域点云密度在500 pts·m-3以上,相比较于传统机载LiDAR 点云密度集中在100 pts·m-3以下,无人机高密度LiDAR 点云数据更适合小范围高精度栅格图像生产。
另外,由于存在上层冠层遮挡,通常机载LiDAR 点云林下分布较为稀疏。如图11所示,从数据成果中可以观察到,该无人机高密度LiDAR点云林下分布密度远高于传统机载LiDAR 点云。其原因在于该无人机LiDAR 系统采用固态激光雷达,扫描线数高,且采用重复扫描的方式运行。以常用传统机载LiDAR 设备徕卡ALS60 为例,该设备与大疆禅思L1 雷达参数对比如表3所示。

表3 徕卡ALS60、禅思L1 部分参数对比Table 3 Comparison of parameters between Leica ALS60 and DJI L1
由表3可知,大疆禅思L1 所携带激光雷达波长与徕卡ALS60 激光雷达扫描角、波长接近,但扫描频率、脉冲频率均高于徕卡ALS60,且大疆禅思L1 所搭配的大疆M300 RTK 无人机飞行高度远低于有人机,因此在激光束穿透性接近的情况下,大疆禅思L1 所发射的激光束穿过冠层缝隙的概率更大,因此其接收到林下地物回波的脉冲数量更多。所以在相同郁闭度下,大疆禅思L1 所生产的点云数据林下密度更高,可以利用该特点对林下植被参数、地形进行更为精细的估测。根据点云所提供的空间结构信息,可以生成分辨率达到0.1 m 的高精度冠层高度模型,基于该模型可以提高对小冠幅树木的分割精度,提高对高郁闭度人工针叶林林分的单木识别能力。
本算法基于分层处理思想,通过层次化的方法有效控制了各个树顶的扩散速度。在同一样地数据内,层次划分越多,各个树顶扩散速度越统一,相对而言,计算速度也越慢。传统机载LiDAR的点云数据由于密度不够高,难以生成高分辨率CHM 图像,单棵立木所占像素数量较少,并且在单棵立木所占的CHM 像素中,高度分布不均匀,同一树冠内相邻像素像素值落差极大,这也就限制了分层处理时的分割层数,因此在应用分层思想时效果不明显。而无人机高密度LiDAR 点云数据可以生成分辨率达到0.1 m 的CHM 图像,且同一树冠内部相邻像素像素值过渡较为平滑。当林分郁闭度较高时,高分辨率CHM 图像可以有效识别出树冠之间的高程分布鞍部,应用分层处理思想可以在树冠相接处更好地控制边界扩散速度,提高树冠边界分割精度。另外本研究对树冠形状进行了一定限制,降低了极端条件下边界扩散不均匀导致树冠变形的情况出现概率,但需要一定先验知识,因此对于树冠边界的扩散约束条件仍有待改进。
4 结 论
本研究基于无人机高密度LiDAR 点云所生成的高分辨率CHM 图像,提出的新型单木分割算法,在高郁闭度人工针叶林样地内取得了非常好的单木识别效果,有效降低了漏检率。
经实验证明,CHM 图像分辨率越高,高郁闭度人工针叶林单木分割效果越好。传统机载LiDAR 由于航空器飞行高度较高,速度较快,其生产的激光点云数据密度不高,难以生产分辨率低于0.5 m 的CHM 图像,通常其生产的CHM 图像分辨率在0.5 m 到1 m 之间。而大疆禅思L1 高精度固态激光雷达搭载在无人机平台上,飞行高度低,飞行速度慢,其生产的点云密度是传统机载LiDAR 点云的数十倍,基于上述点云数据可以生产分辨率达到0.1 m 的CHM 图像,极大地提高了单木分割精度。本研究提出的算法应用于高密度LiDAR点云数据所生产的高分辨率CHM图像,相较于搭配传统机载LiDAR 点云数据生产的低分辨率CHM 图像,分割精度更高。
通过研究发现,针对林业行业需求,新型固态LiDAR 仍然存在高郁闭度林分穿透性不强、可接收回波次数少等劣势,且小型无人机单架次飞行面积较小,相比传统航空器作业效率较低,对于大面积林业参数估测能力仍然需要提升。
综上所述,无人机高密度LiDAR 点云为林业行业遥感研究提供了新思路,其能有效反映高郁闭度人工针叶林林分的空间结构,利用它可以生产更高分辨率的冠层高度模型,可以更细粒度地对森林空间结构参数进行统计。本研究提出的单木分割算法可以与无人机高密度LiDAR 点云有效结合,提高了高郁闭度人工针叶林林分的单木分割精度。基于该高精度单木分割结果,可以在单木尺度下得到更丰富的空间结构信息,有利于提高大范围森林结构参数估测精度。
