基于TCP的气动手爪MCD模型虚拟调试的研究
2022-09-22赵永信度国旭吴坚黎玲萍
赵永信,度国旭,吴坚,黎玲萍
(广西工业职业技术学院智能制造学院,广西南宁 530001)
0 前言
NX软件中的机电概念设计模块(MCD)可以用于三维模型的机械设计、电气设计和自动化设计。MCD模型的概念设计融合多学科于一体,既可以实现虚拟设备之间的仿真控制,也可以实现真实PLC控制虚拟三维模型,使得设计更为直观和灵活。
在自动化设计过程中可以使用内部信号对模型进行三维模型动态仿真验证。肖祖东等详细地阐明了基于NX 平台的圆形装载机MCD概念设计的过程,验证了基于MCD模块平台的机电一体化概念设计的可行性和优越性。当然也可以使用外界控制信号实现数据交换,目前也有很多基于OPC技术实现这种外界数据交换的研究。熊雪平等基于NX MCD平台实现了MAKA机床MCD仿真三维模型与PLC实物联合调试。王俊杰等利用OPC作为桥梁,实现了某数控机床的MCD模型与虚拟PLC之间的虚拟调试。吴雁等人基于NX MCD平台实现了自动上下料机械手的虚拟仿真。但是,MCD虚拟调试的桥梁并非只有OPC技术,利用TCP协议作为桥梁的方式进行虚拟调试的方法鲜有看到。
本文作者在NX软件中建立工业机器人的一种双气爪工具的三维模型,并对该模型进行MCD设计,分别说明其机械设计、电气设计以及自动化设计过程;利用非OPC技术,即一种开放式用户通信协议TCP实现虚拟PLC控制MCD虚拟模型的动态虚拟仿真。
1 气动手爪模型的机械设计
在NX软件中把模型的基本机电对象(刚体、碰撞体等)、运动副和约束等定义归入机械设计部分。首先,定义双气动手爪模型的机电对象,把双气爪模型的2个手爪的4个爪手均设置为刚体,在刚体的设置中,软件会自动赋予爪手相应的质量和惯性矩,赋予其真实的物理属性。为实现气动手爪模型的功能验证,把一个气动手爪的夹紧和释放动作分解为2个爪手沿着某个方向的滑动。由于研究的模型是双气爪,因此需要建立4个滑动副,1个手爪的2个爪手各自定义1个滑动副,滑动副的滑动方向均指向相互靠近的方向,用以模拟仿真手爪的夹紧状态。
2 气动手爪模型的电气设计
在电气设计部分,可以设计传感器、位置控制、速度控制以及MCD内部信号配置等内容。通过MCD中电气设计中的位置控制把双气爪的每个滑动副的运动速度设置为20 mm/s,并设置滑动副的定位距离为7 mm。在完成机械设计和电气设计后可以通过播放命令看到气动手爪的动作仿真,用以验证机械设计部分和电气设计中的相关设置是否合适,如图1所示。

图1 双气爪三维模型
为通过信号控制双气爪的2个气爪的夹紧和松开动作,可以在MCD模块中的电气设计中进行信号配置,如图2所示。

图2 双气爪的信号适配器设置
信号配置的思路是把双气动手爪的2个手爪的位置控制中的定位参数作为机电对象的信号控制参数,具体地说就是把4个爪手的位置控制中的定位参数修改为0。设置为0的目的是想通过信号配置实现信号控制参数的赋值,再添加2个输入信号,在信号配置的公式中进行编程。图中对应程序的含义:如果输入信号qizhua1和qizhua2分别为“1” 状态时,位置控制中定位参数均赋值7 mm,否则为0,由此改变信号控制参数,通过改变参数实现MCD中对气动手爪的位置控制动态仿真。
同时,需要添加2个输出信号,用以反馈气爪的状态。在信号适配器中添加输出信号Sensorout_1和Sensorout_2,分别用来反馈2个手爪的状态。在信号适配器中编写程序,图2中对应程序的含义:如果qizhua1(qizhua2)信号为“1” 状态时,Sensorout1(Sensorout2)信号则为“1” 状态,否则为“0” 状态。
3 气动手爪模型的自动化设计
MCD模块中的自动化设计主要是实现仿真序列、电子凸轮、运行时的NC以及外界信号通信配置等功能。双气爪模型通过电气设计配置了信号适配器的信号及其关联动作,接下来添加其仿真序列,以实现信号控制气动手爪的动态仿真效果。
在仿真序列中把信号适配器作为仿真序列的机电对象,在运行时,把qizhua1和qizhua2信号均打勾并设置为true。再添加1个仿真序列把qizhua1和qizhua2信号均打勾并设置为false,再复制这2个仿真序列,持续时间均设置为1 s,把这4个仿真序列创建链接后点击播放即可。
4 基于TCP的MCD虚拟仿真调试
前文中实现了在NX软件中利用MCD自动化设计实现通过其内部信号控制气动手爪的夹紧和松开动作的仿真试验,接下来利用外界虚拟PLC实现对MCD内部双气爪模型的信号控制。本文作者将S7-1500 PLC的高级仿真器PLCSIM Advanced 2.0作为虚拟PLC,通过TIA15软件编程并下载到仿真器中,再通过TCP协议实现虚拟PLC与MCD模块的通信。信号关系如图3所示。
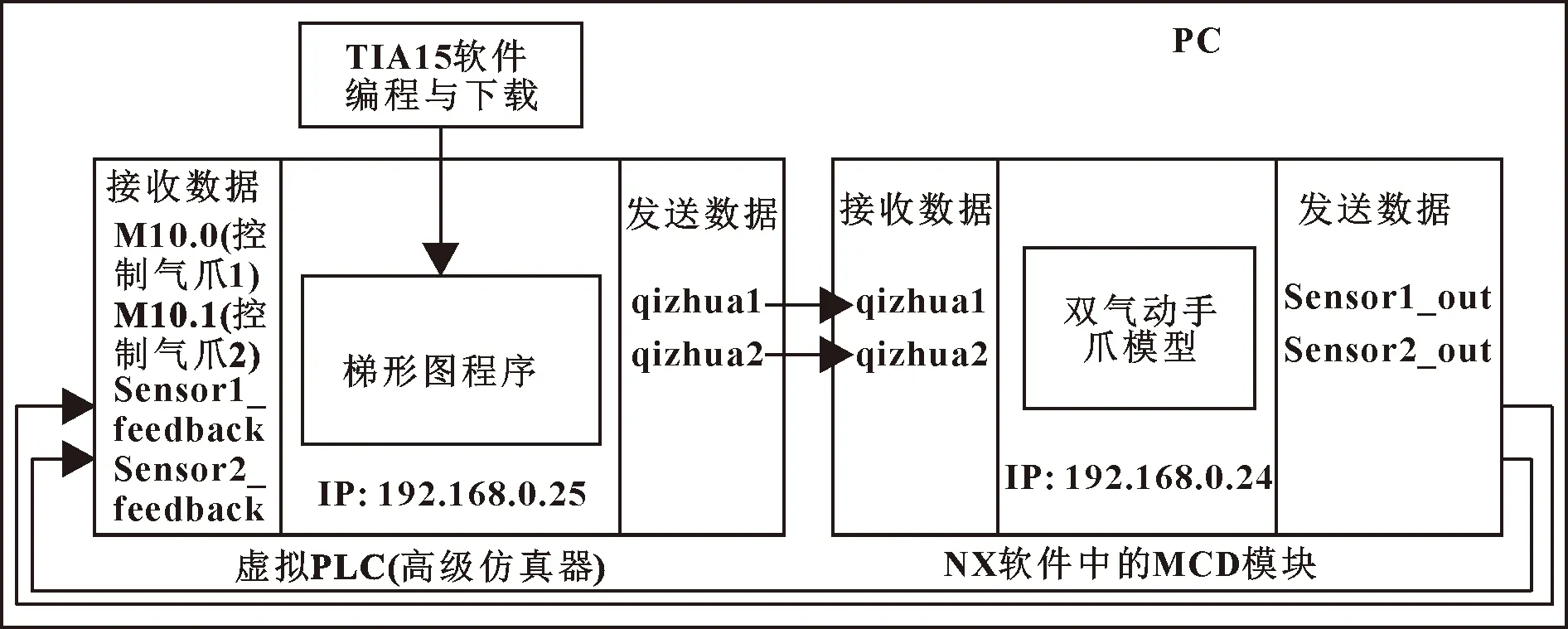
图3 信号关系
从图3可以看出:本文作者设想在TCP协议下实现虚拟PLC与MCD模块之间的信号关联,以此实现虚拟PLC控制MCD中虚拟气动手爪的自动控制。
4.1 S7-1500 PLC组态及编程下载
在TIA15软件中添加一款S7-1512C-1PN的PLC,添加一个子网后设置其IP地址为192.168.0.25,这里设置的IP地址与虚拟PLC(PLCSIM Advanced V2.0)中设定的IP地址要一致。在防护与安全的连接机制中需要勾选允许PUT/GET通信访问。然后,在OB1模块中调用开放式用户通信中的TSEND_C和TRCV_C指令,编程如图4所示。

图4 PLC程序
在程序中利用TCP通信指令实现双气爪模型与虚拟PLC之间的信号连接,并通过添加2个非优化的全局数据库SEND和RECEIVE来分别存放发送和接收数据。利用旋钮开关信号M10.0控制qizhua1信号;利用旋钮开关信号M10.1控制qizhua2信号。通过TCP协议,把PLC中发出的qizhua1和qizhua2信号分别映射到MCD气动手爪模型的qizhua1和qizhua2信号,实现气爪的夹紧和松开动态仿真。同时,通过监控PLC中接收到的反馈信号Sensor1_feedback和Sensor2_feedback可以看出气爪的状态。为方便监控这2个反馈信号,利用Q6.0和Q6.1信号分别作为反馈信号的输出指示信号。
4.2 MCD中的TCP设定
在MCD中的自动化设计部分进行MCD信号服务器配置,绑定计算机中虚拟网卡的地址192.168.0.24,设置服务端口号,创建一个新的连接,在新的连接中填入虚拟PLC的地址192.168.0.25即可。在接收和发送数据区会自动识别MCD模块中的内部信号,每一个信号都有一个偏置,这个偏置与PLC接收和发送的全局数据块中的偏移量对应上即可,不需要再进行信号的映射设置。MCD信号服务器配置如图5所示。
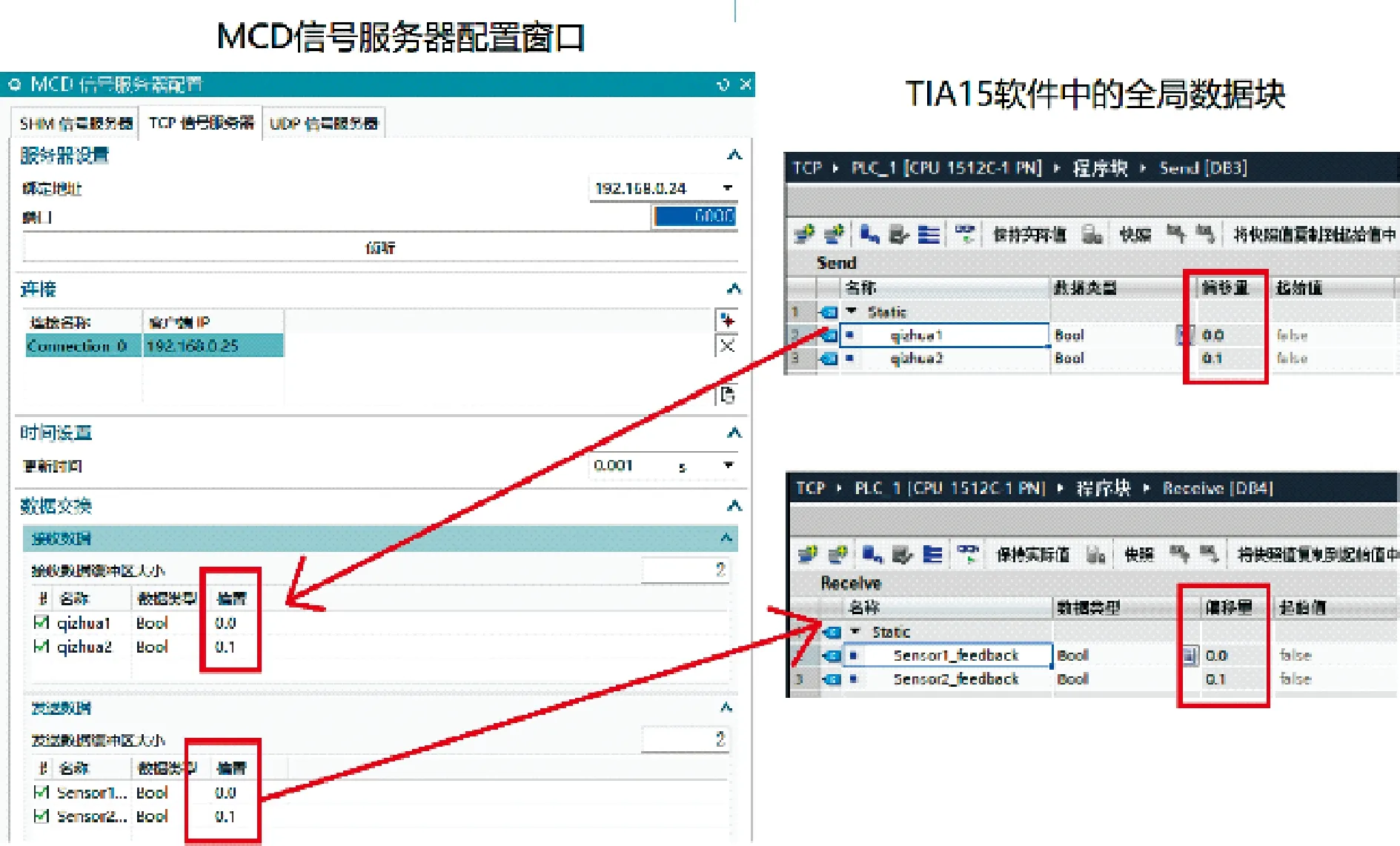
图5 MCD信号服务器配置
4.3 虚拟PLC控制气动手爪仿真实现
首先,将TIA15软件组态、编程及下载程序到虚拟PLC后,在MCD模块中配置信号服务器,实现虚拟PLC与MCD模型的信号连接与信号映射,最后通过动态仿真实现虚拟PLC控制气动手爪模型的功能。仿真结果图如图6所示。
从图6(a)可以:当气爪1控制信号M10.0为true状态时,MCD模块中的气爪1处于夹紧状态,并且在TIA15软件的监控程序中,显示了气爪1的状态反馈指示信号为true状态;同理,图6(b)中气爪2控制信号M10.1为true状态时,MCD模块中的气爪2处于夹紧状态,并且在TIA15软件的监控程序中,显示气爪2的状态反馈指示信号为true状态。

图6 仿真结果
5 结论
本文作者依托于NX MCD平台,基于数字孪生技术的发展,以工业机器人双气爪模型的机电概念设计为主要研究内容,利用开放式用户通信TCP协议作为桥梁,实现了双气爪MCD模型的虚拟调试(利用虚拟PLC控制气动手爪模型的三维动态仿真调试),为机电一体化概念设计的发展提供了参考。
