基于地球重力法的低频加速度计校准
2022-09-21赵焕兴刘志华李贺佳蔡晨光
杨 明,赵焕兴,刘志华,李贺佳,蔡晨光
(1.贵州大学 电气工程学院,贵州 贵阳 550025;2.中国人民解放军32382部队,湖北 武汉 432200;3.中国计量科学研究院,北京 100029;4.内蒙古自治区计量测试研究院,内蒙古 呼和浩特 010050)
1 引 言
为更好地满足桥梁与建筑结构健康、风力发电安全、地震预警等领域的振动监测需求,越来越多的低频加速度计被用于振动测量[1~4]。为确保低频加速度计的测量精度,需通过振动校准方法对其灵敏度定期进行校准。目前,最为常用的低频振动校准绝对法包括激光干涉法与地球重力法[5~7]。激光干涉法通过复现长冲程振动台为低频加速度计提供的激励加速度实现校准。然而,受振动台工作台面运动行程的限制,在低频范围内提供的激励加速度幅值很小,且随着振动频率的降低而急剧减小[8]。微小的激励加速度导致加速度计输出信号的信噪比低,严重影响灵敏度校准不确定度的改善[9]。此外,由于机械加工与加速度计负载等因素的影响,振动台的导轨存在弯曲,弯曲引入的额外激励加速度分量对灵敏度幅值校准精度的影响较为明显。Bruns T等[10]与Yang M等[11]提出基于导轨弯曲的校正模型,借助不同的导轨弯曲测量方法实现灵敏度幅值的校正以提高校准精度,但导轨弯曲的影响难以完全消除。
地球重力法利用转台为加速度计在DC(静态)至低频范围内提供峰值恒定为1g的激励加速度[12],有效避免了微小激励加速度与导轨弯曲的影响。然而,ISO 16063-16[5]只提供了基于两点法与四点法的灵敏度幅值静态校准规范,无法用于灵敏度幅值与相位的动态校准。占伟伟等[13]在ISO 16063-16静态校准的基础上,提出基于非线性最小二乘原理的静态校准修正方法,以减小标定中安装误差影响;Dosch J[14]提出利用转台回零位置的零编码器输出脉冲信号提升地球重力法的校准能力,实现了频率高至5 Hz的灵敏度幅值与相位动态校准,但由于未进行地球重力场定向,校准的灵敏度相位存在固定系统偏差;Yang M等[15]提出基于时空同步的地球重力动态校准方法,且相比于激光干涉法在低频范围内获得了较高的校准精度,但由于随频率增大而宽度变窄的脉冲信号采集限制了校准上限频率的提高。
现有地球重力法难以用于较高频率的灵敏度幅值与相位动态校准。本文采用机器视觉角度测量方法[16,17]确定低频加速度计在转台回零位置的激励加速度相位,同时利用高通光电耦合器转换零编码器输出脉冲信号用于触发采集的开关信号,以准确地确定加速度计在与回零位置对应时刻的输出信号相位,进而实现地球重力法在DC(静态)到10 Hz范围的灵敏度幅值与相位动态校准及灵敏度幅值静态校准。
2 基于地球重力法的灵敏度幅值静态校准
传统地球重力法校准系统如图1所示,被校低频加速度计紧固于转台的工作台面,其灵敏轴方向与工作台面平行,加速度计的激励加速度与转台的旋转角度有关,激励加速度范围为[-g,g]。
以ISO 16063-16推荐的四点法静态校准灵敏度幅值SDC为例,控制转台使其工作台面相对于地球重力场方向依次旋转θ、(180°-θ)、(180°+θ)及(-θ)。同时记录对应的加速度计输出信号幅值Vθ、V180°-θ、V180°+θ及V-θ。则灵敏度幅值SDC为:
(1)
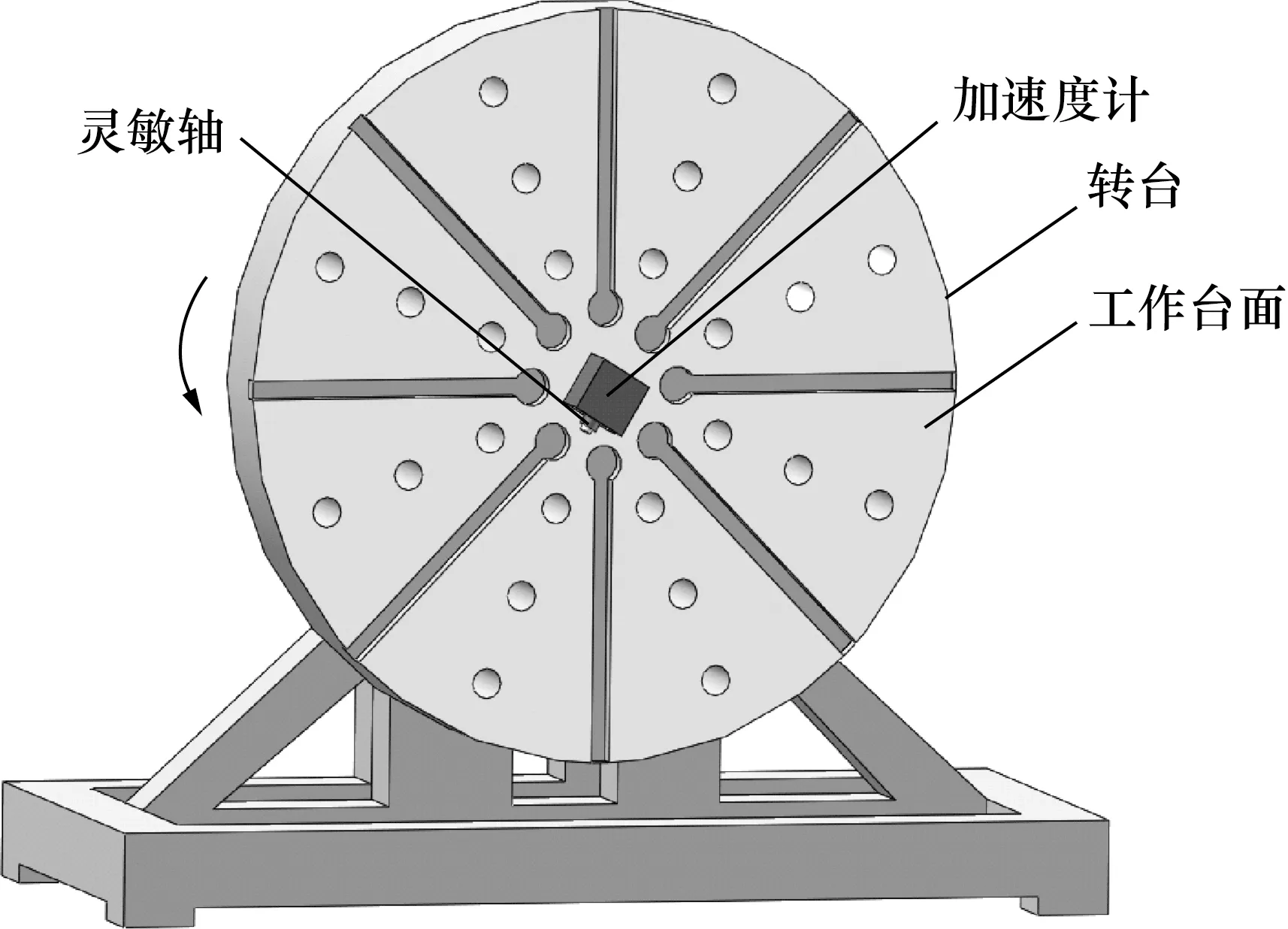
图1 地球重力法校准低频加速度计安装示意图Fig.1 Sketch of the installation of the low-frequency accelerometer calibrated by the Earth’s graviation method
3 基于地球重力法的灵敏度幅值与相位低频校准
3.1 基于机器视觉的地球重力法低频校准系统
为实现低频范围的加速度计灵敏度幅值与相位校准,建立如图2所示的机器视觉地球重力法动态校准系统。零编码器安装于转台上,当工作台面经过转台零位置时输出脉冲信号。特征标志与加速度计均紧固于工作台面,矩形特征标志长边边缘与灵敏轴方向一致。铅锤放置于充满油的水槽中,铅垂线方向即为地球重力场方向。摄像机用于采集铅垂线图像与回零位置的标志图像,采集卡用于采集加速度计输出信号。

图2 基于机器视觉的地球重力法动态校准系统原理图Fig.2 Schematic showing of the machine vision-based earth’s graviation method dynamic calibration system
首先利用机器视觉确定地球重力场方向,再计算转台回零位置标志图像矩形长边边缘相对于地球重力场方向的旋转角,获得激励加速度在该位置的相位θ0。零编码器输出脉冲信号由高通光电耦合器转换后,触发数据采集卡采集加速度计输出信号,初始采集点为回零位置对应的输出信号相位φ0。
3.2 灵敏度幅值动态校准
为阐明转台不同旋转位置的激励加速度,将工作台面所在平面划分为如图3所示的4个象限Ⅰ~Ⅳ。Ⅰ象限旋转角度θ∈[ π / 2,0),Ⅱ象限θ∈[0,- π / 2),Ⅲ象限θ∈[- π / 2,- π ),Ⅳ象限θ∈[ π ,π / 2)。Ⅰ~Ⅳ象限对应的激励加速度范围分别为[0,g)、[g,0)、[0,-g)及[-g,0)。当灵敏轴方向与地球重力场方向平行(θ=0rad位置)时,激励加速度最大为1g;当灵敏轴方向与地球重力场方向相反(θ= πrad位置)时,激励加速度最小为-1g。kV表示特征标志矩形2条长边边缘的方向。
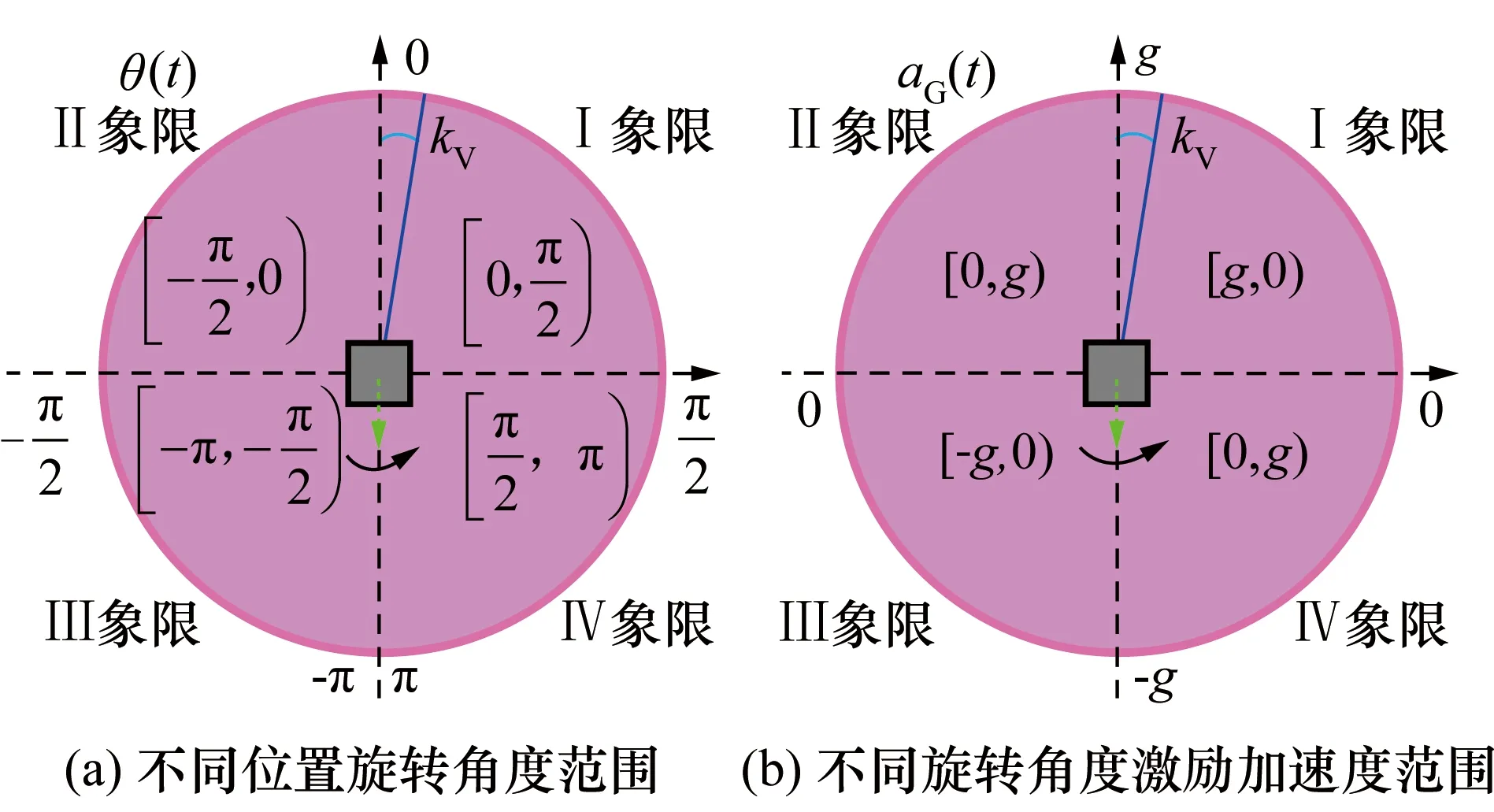
图3 不同旋转位置的加速度计激励加速度Fig.3 The excitation acceleration of the accelerometer at different rotation positions
在任意旋转位置,转台为加速度计提供的激励加速度aG(t)可描述为:
aG(t)=gcos[θ(t)]
(2)
式中θ(t)为转台不同位置的工作台面相对于地球重力场方向的旋转角度。该激励加速度下对应的加速度计输出信号VG(t)表示为:
VG(t)=Sm·aG(t)
(3)
式中Sm为加速计灵敏度幅值。依据ISO 16063-11的定义,加速度计的灵敏度幅值为其输出信号拟合峰值与激励加速度峰值之比。由于地球重力法的激励加速度峰值(等于1g)已知,则通过正弦逼近法拟合不同时刻的VG(t)得到其拟合峰值Vp,即可获得灵敏度幅值:
Sm=Vp/g
(4)
因此对于灵敏度幅值的动态校准,只需确定不同频率下的输出信号拟合峰值即可。
3.3 灵敏度相位动态校准
由于转台回零位置的激励加速度相位θ0与零编码器输出脉冲信号触发采集时刻的输出信号相位φ0相对应,则灵敏度相位φp可定义为:
φp=φ0-θ0
(6)
利用骨架提取方法获取铅垂线图像的垂线中心像素坐标点,再基于最小二乘原理的直线拟合得到地球重力场方向kG。采用亚像素边缘检测方法提取回零位置的标志图像矩形两条长边边缘点的亚像素坐标。相似地,基于最小二乘原理拟合获得两条边缘斜率,其均值为kV。则转台回零位置的激励加速度相位θ0:
(7)
式中k = 0,1。加速度计位于Ⅰ与Ⅱ象限时,k的取值为0;在Ⅲ与Ⅳ象限时,k的取值为1。
利用经光电耦合器转换的零编码器输出脉冲信号触发采集的加速度计输出信号VG(ti)与采集时刻ti建立如式(8)所示的方程,其中i = 1,2,…,N,N为采样点数。
VG(ti)=Acos(ωvti)-Bsin(ωvti)+Cti+D
(8)
式中ωv为振动角频率。基于最小二乘原理求解式(8),获得参数A、B、C及D,得到输出信号峰值Vp与触发采集时刻的输出信号相位φ0:
(9)
4 实验结果与分析
4.1 实验装置
为验证所提出方法的校准不确定度,搭建如图4所示的机器视觉地球重力法动态校准系统。转台为紧固于其工作台面的低频加速度计(MSV 3000)提供0.001~10 Hz范围内最大峰峰值为2g的正弦激励加速度;由4个直径为15 mm的圆与1个尺寸为40 mm×60 mm的矩形构成的特征标志也固定于工作台面。
选择最高分辨率900万像素、最大帧率1 000帧/s的摄像机(OS10-V3-4K)采集铅垂线图像与转台回零位置的标志图像。选用20 MHz速率的高通光电耦合器(757-TLP2770E)转换转台零编码器输出脉冲信号,以作为数据采集卡的触发信号。最高采样频率400 kHz的数据采集卡(ADLINK 9527)用于采集不同频率的加速度计输出信号。此外,外差激光干涉仪(OFV-5000)也用于校准加速度计的灵敏度幅值与相位,以用于对比验证。
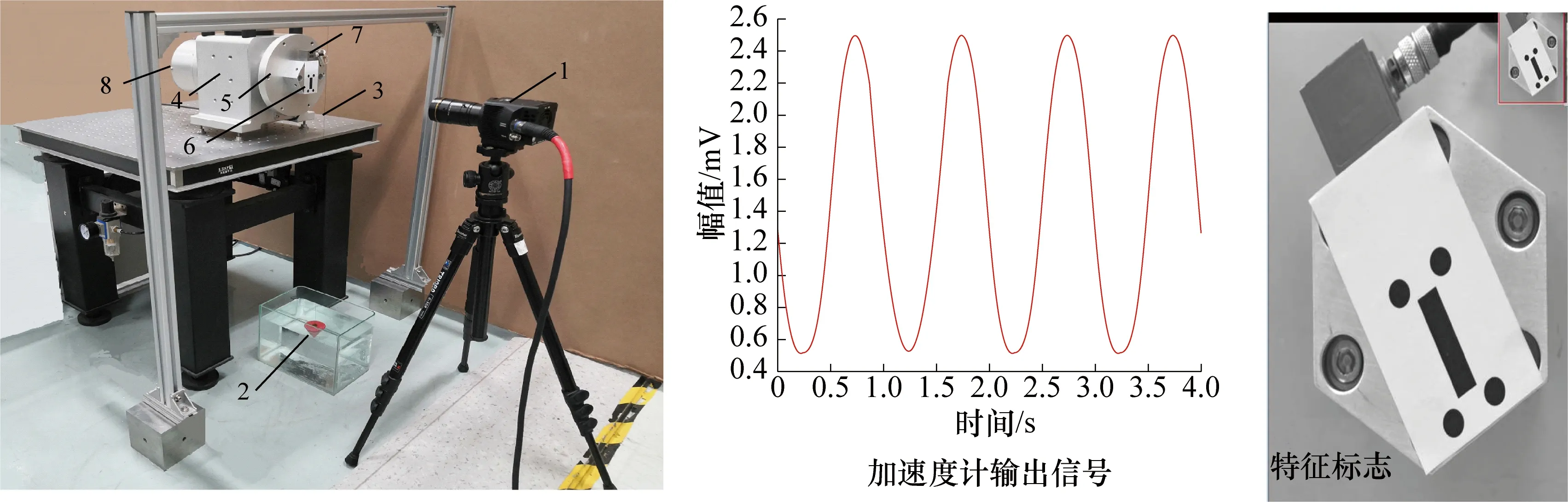
图4 基于机器视觉的地球重力法动态校准装置Fig.4 Setup for the monocular vision-based earth’s graviation dynamic calibration method1-摄像机;2-水槽;3-铅锤;4-铅垂线;5-工作台面;6-转台;7-低频加速度计;8-特征标志;9-高通光电隔离器
4.2 灵敏度幅值与相位动态校准结果
使用机器视觉方法,测量转台回零位置的激励加速度相位θ0为-29.598 4°,再将不同频率下触发采集时刻的输出信号相位φ0代入式(6),得到灵敏度相位。利用地球重力法,在0.001~10 Hz选取的不同频率分别进行10次灵敏度幅值与相位动态校准,并对灵敏度幅值进行10次静态校准,校准结果如图5所示。

图5 DC到10 Hz范围的加速度计灵敏度校准结果Fig.5 The calibrated sensitivity results of the accelerometer in the range from DC to 10 Hz
选用灵敏度幅值相对标准差Sm,R,Std与灵敏度相位标准差φp,Std表征提出地球重力法的不确定度,其中Sm,R,Std的计算如下:
(10)
式中:Sm,Mean与Sm,Std分别为灵敏度幅值均值与标准差。在 0.001~10 Hz,本文提出方法的最大Sm,R,Std与φp,Std分别约为0.118%与0.124°。
灵敏度相位标准φp Std为:
(11)
式中φp,i与φp Mean分别为第i次校准的灵敏度相位与灵敏度相位均值。
由于低频时振动台提供的有限峰值激励加速度增加激光干涉法的校准不确定度,仅对0.1~10 Hz范围的加速度计灵敏度幅值与相位进行了校准。
表1所示为激光干涉法与提出方法的校准结果,整个频率范围内,2种方法校准的灵敏度幅值与灵敏度相位高度吻合。
5 结 论
本文提出的地球重力法能够同时实现灵敏度幅值与相位动态校准以及灵敏度幅值静态校准。采用机器视觉方法测量低频加速度计的激励加速度相位与确定对应时刻的输出信号相位,同时实现了地球重力法的灵敏度幅值与相位动态校准,在DC~10 Hz范围内获得了较优不确定度的校准结果。与激光干涉法的对比实验结果表明,提出的地球重力法可实现低频范围的高精度灵敏度幅值与相位动态校准。提出的校准方法提升了地球重力法的校准能力,能够满足很低频率的校准需求。

表1 在0.1~10 Hz范围内地球重力法与激光干涉法校准的灵敏度幅值与相位Tab.1 The calibrated sensitivity magnitudes and phases by the Earth’s graviation method and the laser interferometry in the range from 0.1 to 10 Hz