一种气动机器人垃圾分拣系统的设计与分析
2022-09-20王华
王 华
(商丘职业技术学院机电工程系, 河南商丘 476005)
引言
随着人们生活水平的提高及城镇化的快速发展,城市规模逐渐扩大,人口密度逐渐增加,但随之而来产生的生活垃圾、建筑垃圾也在不断增加,对自然生态环境造成极大破坏,实现生活垃圾、建筑垃圾分类投放非常必要[1]。目前,生活垃圾、建筑垃圾分类仍采用人工流水线分拣方式,该方式劳动强度大,工人工作环境恶劣,分拣效率低和自动化程度低,完全不能满足我国目前城市化的发展和生态保护,垃圾自动化分拣系统代替人工分拣势在必行。结合工业机器人技术和计算机视觉技术的新型自动化分拣系统不仅能够实现垃圾分类的智能化和柔性化,而且还可以节约成本,减少工人劳动强度和提高生产效率等[2],未来在工业自动化发展中有着广阔前景。
唐媛红等[3]设计的机器人视觉采摘分拣控制系统,解决了果蔬采摘完后分拣作业的效率低、分拣精度差等问题;王成军等[4]分析了机器人视觉技术在自动化分拣设备中的广泛应用,同时也分析国内外研究应用现状和存在的问题,为后续机器人视觉技术在智能化分拣系统中的应用提供参考依据;郝大孝等[5]通过运用欧姆龙NJ运动控制器设计一种机器人控制系统,实现精准抓取,同时提出一种动态抓取算法,该算法和机器人视觉完美结合,实现分拣过程精准和抓取率高。目前,我国垃圾分拣基本依靠人工分拣为主,机械辅助分拣很少,人工成本高且危险性很大,工作环境恶劣,分拣效果较差;为进一步提高智能化垃圾分拣效率,基于现状,设计出一种基于机器人视觉垃圾分拣系统,为后续实现垃圾分拣完全自动化提供参考依据。
1 机器人分拣设备整体设计方案
利用SolidWorks三维软件,设计出一种新型智能化机器人,以康奈视In-Sight 7000型智能相机等为基础,搭建一种基于机器人视觉垃圾分拣系统平台[6],整体结构设计如图1所示。
智能化垃圾分拣系统工作过程:首先,生活垃圾经过两侧智能相机扫描后,智能相机对采集到的目标物进行预处理,寻找相应的轮廓,对目标进行提取;然后,进行形状判别,对目标进行分析;最后,机械手进行分类抓取,完成整个分拣过程。
2 机械手的设计、运动及控制分析
2.1 机械手结构
机械手机构主要包括[7-8]摆动气缸、转台、立柱、导向杆、活塞、活塞杆、前伸/回缩气缸、上升/下降气缸、吸盘等,智能化机械手机构的简图如图2所示。

1.摆动气缸 2.转台 3.立柱 4.导向杆 5.活塞 6.活塞杆7.前伸/回缩气缸 8.上升/下降气缸 9.吸盘图2 机械手机构示意图简图Fig.2 Schematic diagram of manipulator
2.2 驱动系统的设计
机械手底座采用气缸驱动,关节臂和吸盘利用单杆循环运动的双向气缸驱动,分拣抓取机械手的运动主要包括底座旋转、竖直机械臂的上下运动、水平机械臂的前后运动、吸盘拾取或者放下对应的垃圾物体等[9-10],机械臂驱动系统原理图如图3所示。
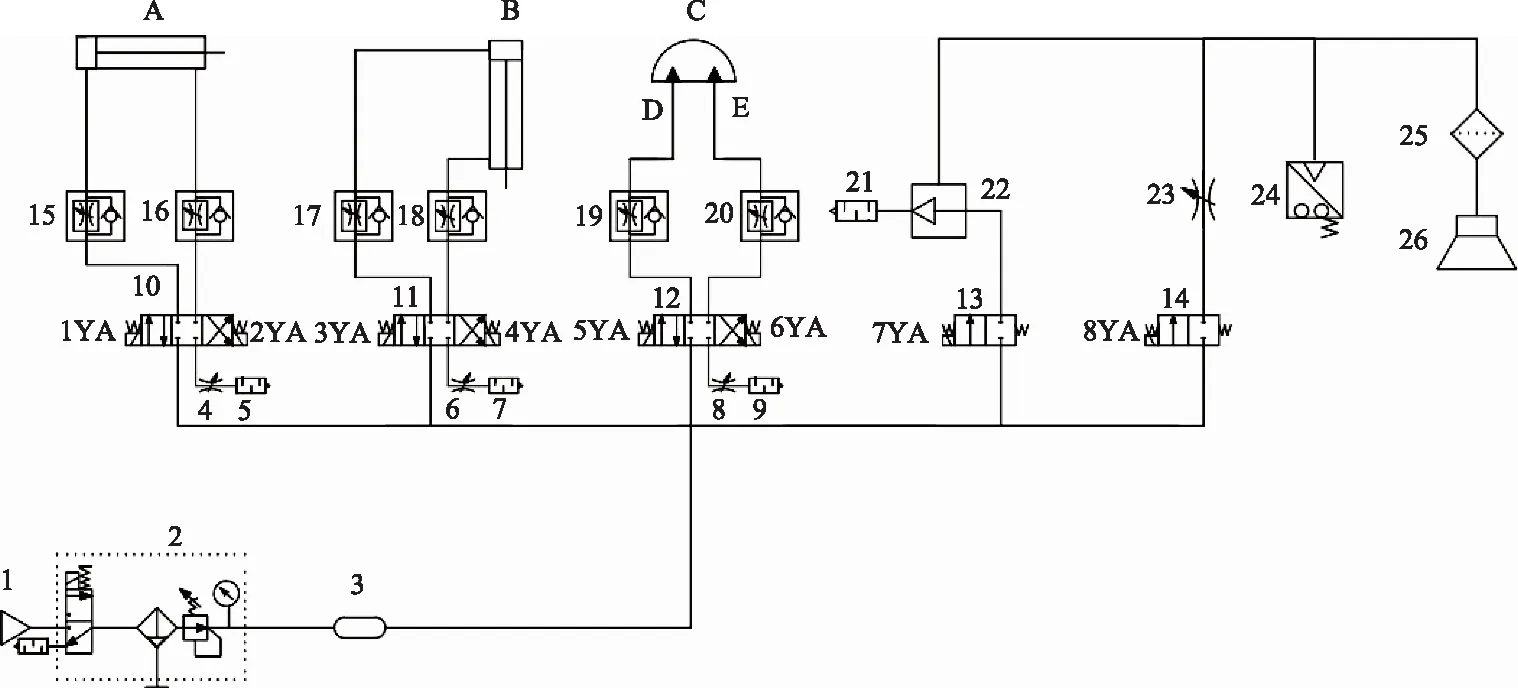
1.气体压力机 2.压缩气体处理结构 3.气体罐 4、6、8、23.控速阀 5、7、9、21.消音装置10~12.三位四通电磁换向阀 13、14.二位二通电磁阀 15~20.单向控速阀 22.真空压缩机 24.开关25.过滤装置 26.拾取装置 A.水平伸缩气缸 B.小臂升降气缸 C.摆动气缸图3 机械手驱动系统示意图Fig.3 Schematic diagram of manipulator drive system
智能化垃圾分拣系统机械手的驱动系统包括气缸、吸盘、消声器、电磁换向阀、电磁阀、调速阀等;4个调速阀控制气缸的上下左右运动以及底座的转动速度,避免底座运动速度过快产生刚性冲击;三位四通电磁换向阀可以改变气缸的运动方向,进而控制机械臂的运动;二位二通电磁阀控制真空压缩机,实现对不同种类的垃圾进行吸取和释放;消声装置用于降低排气噪声,改善工人工作环境。
1) 摆动气缸运动控制
当开关左/右旋按键接通后,空气处理单元产生气压经过储气罐进入,三位四通电磁换向阀的6YA/5YA通电,气压回路左/右侧接通,实现摆动气缸左/右旋。
2) 水平气缸的伸缩控制
当底座摆动到右侧或左侧90°位置时,就能碰到右侧或左侧限位开关,使电磁换向阀12断电,底座气压缸停止转动,经时间继电器延时,电磁换向阀10的左侧1YA通电,左侧气压回路接通,水平气缸A右移,水平手臂后缩动作;电磁换向阀10的右侧2YA通电,右侧气压回路接通,水平气缸A左移,水平手臂前伸动作。
3) 竖直机械臂的下降或上升运动控制
当水平机械臂伸出到相应的位置时, 碰触到前限位开关,电磁换向阀10的1YA断电,水平机械臂停止运动,经时间继电器延时,竖直机械臂下降控制按钮接通,电磁换向阀11的左侧3YA通电,左侧气压回路接通,竖直气缸向下运动,执行竖直机械臂向下运动动作;
当传感器检测到相应垃圾已经被吸盘吸起时,电磁换向阀11的右侧电磁铁4YA通电,右侧气压回路接通,竖直机械臂向上运动,执行竖直机械臂上升运动动作。
垃圾分拣机械手可以实现手动、自动等多种工作模式,可以通过利用相应按钮,实现对垃圾分拣机械手的各种运动的控制;也可以利用循环按钮,实现对垃圾分拣机械手自动连续不断的执行分拣任务的各个步骤,气动分拣过程的程序流程图如图4所示。
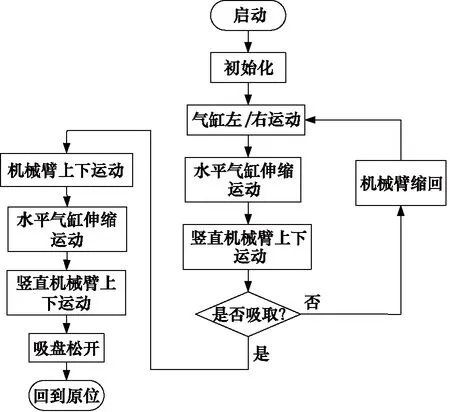
图4 气动分拣过程的程序流程图Fig.4 Procedure flow chart of pneumatic sorting process
3 相机标定
相机标定的目的就是确定图像像素坐标系、相机坐标系和世界坐标系的关系[13]。假设空间中存在任意一点M,在相机坐标系下的坐标为(XC,YC,ZC),该像点在成像平面坐标系中的投影为m,坐标值为(x,y),在图像像素坐标系中的投影点为q,坐标值为(u,v),根据数学知识,可求得空间点M与像点m的函数关系:
(1)
式中,fX—— 相机在X方向的焦距
fY—— 相机在Y方向的焦距
cX,cY—— 表示图像坐标系原点O在像素坐标系的位置坐标
z—— 参数变量
令矩阵:
K称为相机内参数矩阵,表示相机坐标与图像像素坐标之间的关系。
令空间中的一点P在世界坐标系中的坐标值为(XW,YW,ZW),在相机坐标系中的坐标值是(XC,YC,ZC),可以得到如下关系式:
(2)
式中,R—— 旋转矩阵
t—— 偏移向量
转换成齐次坐标的形式是:
(3)
式(3)为世界坐标系与相机坐标系之间的转换数学方程式,其中0T=(0,0,0)。将式(3)代入到式(1)中得:
(4)
式中,s是一个任意刻度比例。式(4)描述了针孔模型下图像像素坐标系与世界坐标系的关系,[XWYWZW]为特征点的世界坐标,利用转换可求得图像像素坐标,进而实现机械手的抓取。
为了提高相机标定的精度,本研究利用9张不同方向的棋盘格图片作为标定模板,每张图片像素为640×480,X,Y方向分别有8个和6个内角点,棋盘格实际边长为30 mm,标定结果如图5所示。
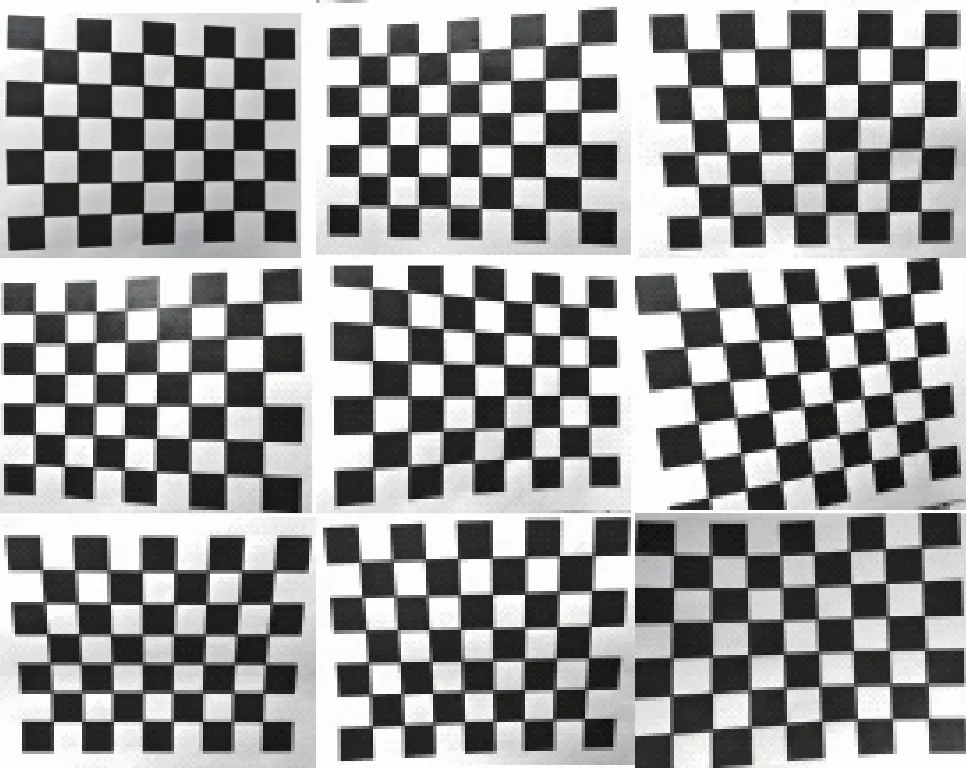
图5 标定模板与结果Fig.5 Calibration template and results
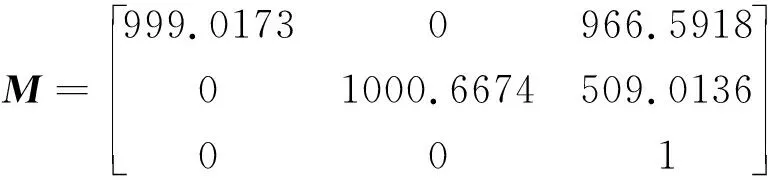
本研究标定按照线性模型方法标定,标定完后相机的内外参数值如下:
相机焦距:
外参数矩阵:

内参数矩阵:
偏移向量:

4 实验验证
为验证搭建平台可行性和有效性,根据所搭建的实验平台,分别在传送带上放置不同的生活垃圾废弃物[14-15],试验现场整体结构图如图6所示。

图6 试验现场整体结构图Fig.6 Overall structure diagram of test site
实验过程中,机械手接到指令运动到相应的位置吸取目标物,然后将目标物放置到指定的位置,在目标物的上方安装另外一个相机,利用相机来获取目标物的中心,通过相机拍照来确定分析机械手在抓取物体时X和Y方向产生的偏差值。经过50次试验和数据收集,得出如图7所示的X和Y方向中心偏差e及表1所示平台分拣实验结果表。
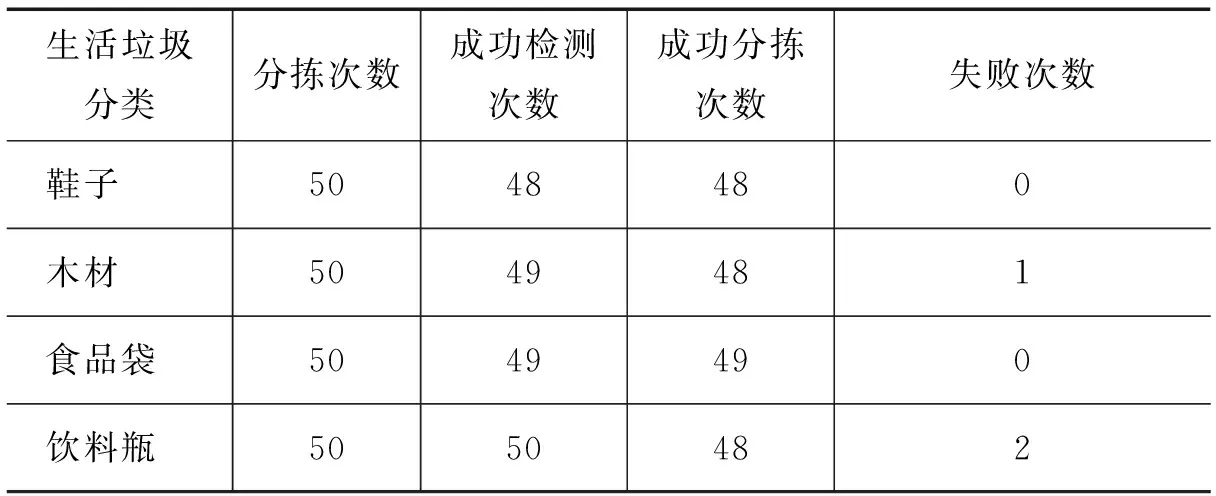
表1 机械手分拣实验结果Tab.1 Experimental results of manipulator sorting
从图7可得,在X方向偏差变化相对大一些,通过对50次抓取动作进行数据收集和计算,得到X方向的重复性精度为1.78983 mm,Y方向的重复性精度为1.03728 mm,X,Y方向的误差即为总体累计误差。由于机械手末端执行机构是吸盘,采用气压吸取目标物,机械手吸盘可吸取3 mm的范围内的目标物,因此,机械手吸盘能实现快速准确抓起和放料。
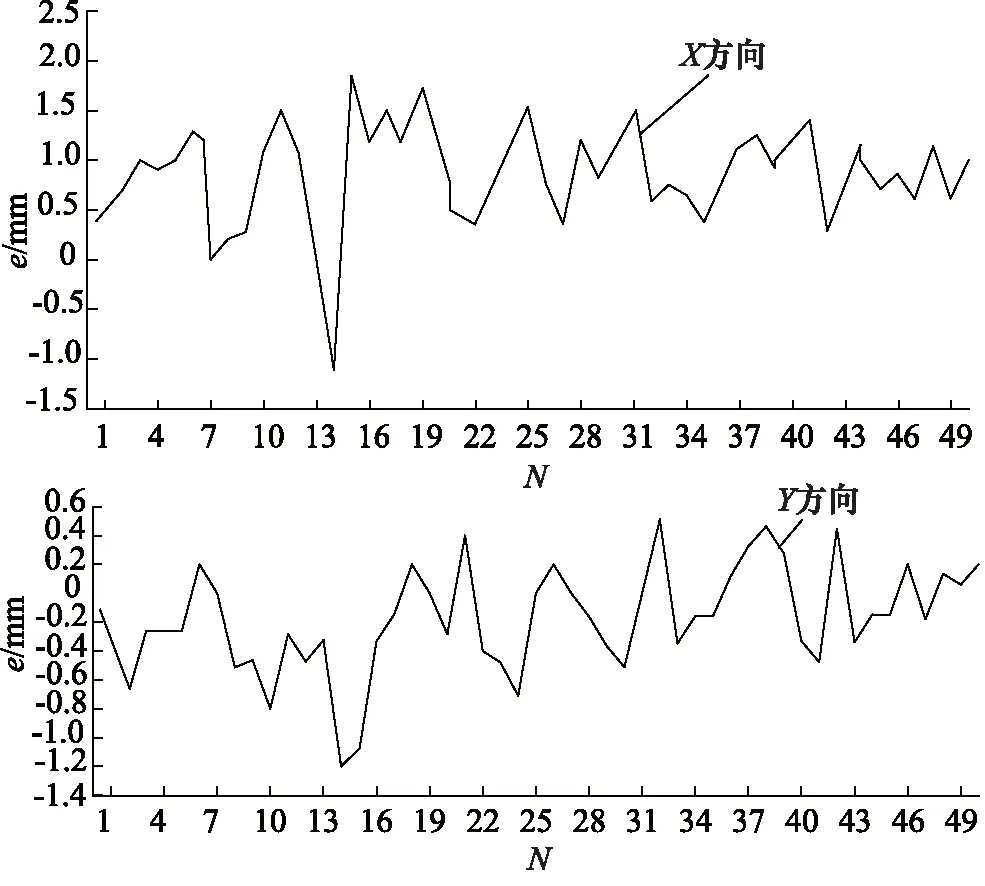
图7 X,Y方向中心偏差Fig.7 Center deviation in X and Y directions
5 结论
现有生活垃圾主要是填埋、焚烧等,生活垃圾处理方式填埋对土壤污染比较严重,焚烧对空气污染严重等,在结合机器人视觉技术的基础上,设计出一种新型自动化垃圾分拣系统,研究表明:
(1) 该系统在机器人视觉引导下的机械手能够高精度的抓取和放料,现场试验证明,该系统精度可以达到3 mm,能够完成生活或生产中垃圾的分拣要求;
(2) 该系统利用气压回路实现对机械手的控制,减少劳动强度,提高了吸盘抓取精度,实现对环境无污染,绿色制造;
(3) 该系统采用棋盘格标定法进行对相机标定,标定结果误差相对较小,实现机械手能精准抓取生活垃圾的设计;
(4) 该系统还具有自动化程度高、分拣精度高、运行相对平稳、工作效率高等特点,具有很好的应用前景,为未来垃圾分拣实现智能化提供参考依据。
