国产腹腔内窥镜手术机器人辅助显微输精管吻合术的动物实验研究
2022-09-20李锦楠李学松
崔 亮,韩 旭,李锦楠,彭 靖,李学松
(1.民航总医院泌尿外科 北京大学民航临床医学院,北京,100123;2.北京大学第一医院泌尿外科,男科中心;3.北京大学第一医院泌尿外科 北京大学泌尿外科研究所 国家泌尿男性生殖系肿瘤研究中心)
传统的显微镜辅助输精管吻合术(microscope assisted vasovasostomy,MAVV)是技术难度较大的手术,耗时长且具有挑战性,需要有效的显微外科训练及历经学习曲线后方可成功实施。机器人辅助手术是快速发展的外科手术技术,已在许多专科广泛应用,包括心脏搭桥、妇科输卵管再吻合术等[1-2]。机器人辅助手术可提供高清的三维显示,辅助消除器械精细操作时的人手震颤,通过运动缩放比调节增加操控的精准性,且明显减轻术者的疲劳感,非常适合显微男科手术的应用。虽然十余年前国外已开展机器人男性不育症显微外科手术的临床应用,也有多篇研究报告发表[3],但截至目前,机器人显微手术并未得到主流支持及广泛应用[4],究其原因可能与商业化的手术机器人仅为达芬奇机器人手术系统有关,其相关设备及器械的高昂价格严重限制了其在机器人男科显微手术方面的临床应用[3,5]。国产内窥镜手术机器人系统已研发成功,我们应用机器人手术系统验证其行机器人辅助输精管吻合术(robotic assisted vasovasostomy,RAVV)的可行性与有效性,以期为临床研究提供参考。
1 资料与方法
1.1 设备及器械 实验组:国产内窥镜手术机器人系统,由医生控制台、机械臂系统、三维图像处理系统、手术微器械四部分组成,特别定制了机器人显微手术器械,包括显微持针器、显微单极剪刀、显微双极钳等。对照组:手术显微镜,显微手术器械。
1.2 实验对象 选取3~4月龄、体重350~450 g的健康SD雄性大鼠12只。应用随机数字法按体重配伍随机分配至实验组与对照组,每组6只。
1.3 手术方法 采用0.4%戊巴比妥钠腹腔注射麻醉(1 mL/100 g),备皮后将大鼠取仰卧位,四肢以绷带固定于小动物专用实验手术台上(图1A)。皮肤消毒后手工取下腹部纵切口2 cm,轻取出一侧睾丸、附睾及精索,仔细解剖出并以牵开器固定输精管,距附睾3 cm处离断输精管。实验组应用RAVV技术,需要有设备的对接过程。台旁助手手持普通显微器械保持原位配合(图1B),由术者移动手术机器人机械臂系统至合适位(十字激光点位于术区中央)。各机械臂均需安装腔镜鞘管,以稳定器械的术中运动。摄像臂安装30度镜头向下以优化术中视野。左手机械臂安装显微双极钳,右手机械臂安装显微单极剪刀或显微持针器。对照组应用MAVV技术,由助手移动手术显微镜至术区,手持普通显微器械操作。两组均以单层缝合法进行输精管吻合。持续无菌生理盐水冲洗,保持输精管湿润、视野清晰。采取10-0双针尼龙线间断缝合输精管黏膜及浆肌全层,共6针(图2A、2B)。吻合完毕后,距吻合口2 cm处离断含吻合口的输精管(图3A),自输精管近端插入24G静脉留置针(图3B、3C),向管腔滴注生理盐水观察吻合口是否通畅。实验完毕结扎术侧输精管后缝合腹部切口。
1.4 观察指标 记录机械臂操作时间、显微吻合时间、机器人手术系统机械故障情况、术后吻合口通畅率、术中不良事件(断线或弯针)情况等指标。术者手术操作的工作负荷强度评价采用美国国家航天航空局任务负荷指数量表(national aeronautics and space administration task load index,NASA-TLX)。NASA-TLX也常用于手术机器人的工作负荷量化评估[6],量表中包括脑力、体力、时间要求、任务完成情况、努力程度、受挫程度共6个条目,各条目以一条20等分的直线标识,表示0~20分,以此来量化衡量操作者完成工作的负荷程度(图4)。
1.5 统计学处理 应用SPSS 26.0软件进行数据分析,均采用双侧检验,P<0.05为差异有统计学意义。计量资料组间比较采用成组t检验。
2 结 果
两组手术均顺利完成,术后大鼠均即刻处死。两组吻合操作完成后即刻验证吻合口通畅率均达100%。实验组需要完成对接后才可开始镜下手术操作,且手术时间较长,术中弯针、断线等发生率高于对照组,见表1。对照组术者术后评价时间需求优于实验组,其余除受挫程度两组无差异外,其他项目(脑力需求、体力需求、任务完成情况、努力程度)实验组均优于对照组,见表2。

表1 两组一般资料及手术相关指标的比较
3 讨 论
输精管梗阻可继发于以男性节育为目的的输精管结扎术、幼年时腹股沟疝修补术、睾丸下降固定术等,是导致梗阻性无精子症的主要病因之一[7]。通过输精管吻合术进行复通是辅助生育最具成本效益的选择,保留了夫妇自然受孕的可能,但输精管吻合术在手术技术上对术者的技术要求具有非常高的挑战性。随着时代发展,输精管吻合术成功引入显微外科,MAVV被认为是治疗输精管梗阻的金标准[8]。虽然既往报道了MAVV在输精管复通率、受孕率等方面的较好结果,但MAVV对于大多数泌尿男科医生而言仍是耗时且具有极大挑战性的手术[9]。
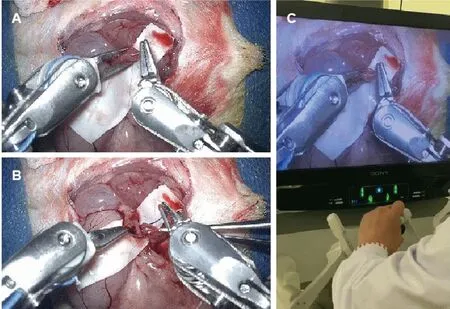
图2 A、B:10-0双针尼龙线间断单层吻合输精管;C:医生控制台选择7∶1为显微外科最佳主从操作比例
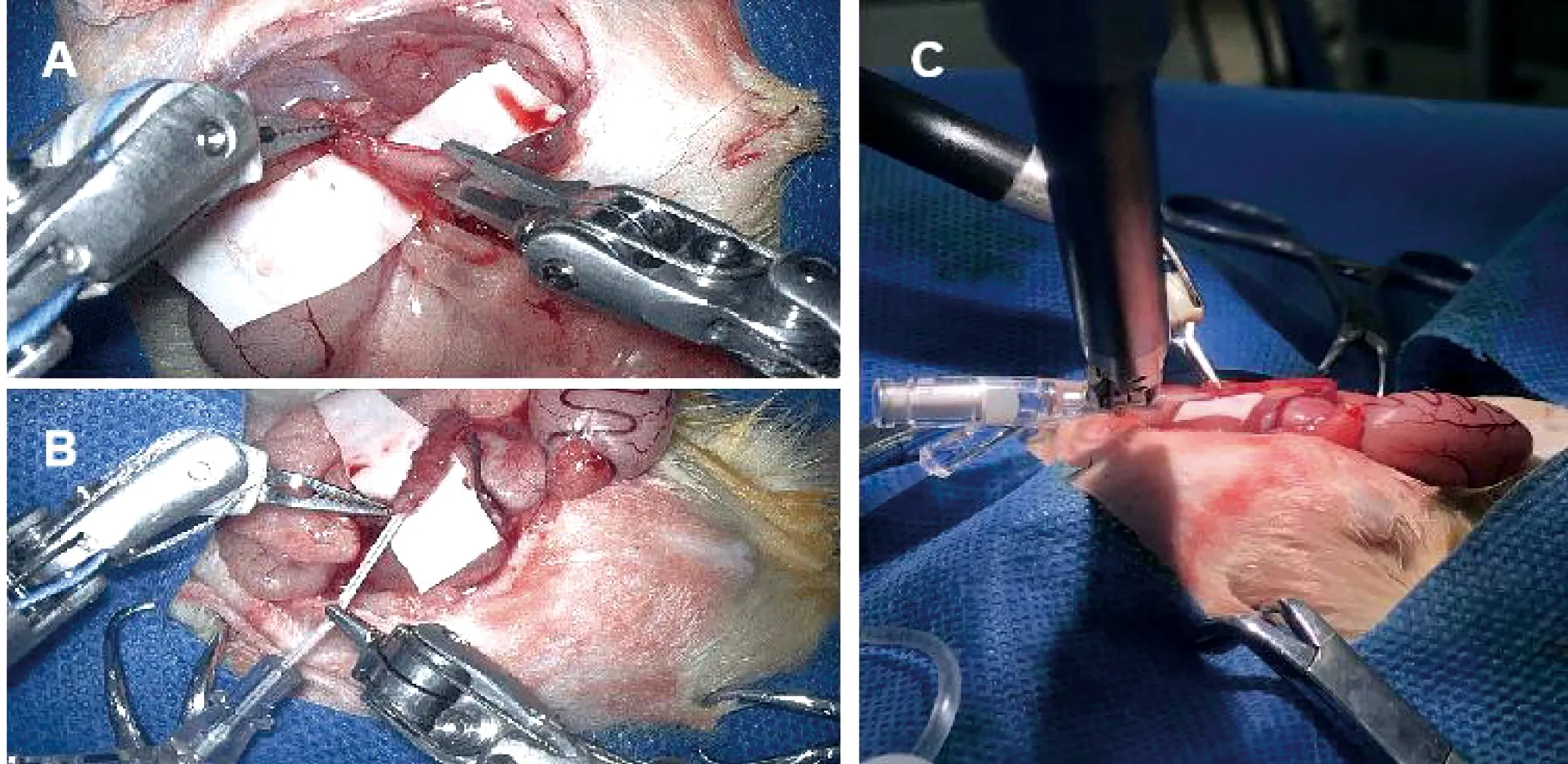
图3 A:距吻合口约2 cm处离断含吻合口的输精管;B、C:插入24G静脉留置针

图4 NASA-TLX
机器人辅助手术是外科手术发展史上的一个标志性里程碑。显微外科输精管吻合术等男科手术技术随着手术机器人平台的引入而逐步发展。早于2003年就开始探索使用离体大鼠新鲜输精管标本模型进行RAVV的可行性研究,吻合采用10-0尼龙线的单层吻合技术,RAVV改良了术者的舒适度,但很遗憾没有进行输精管术后通畅率的评估[10]。其后有研究采用9-0尼龙线的单层吻合技术比较了RAVV与MAVV,并通过吻合口滴注盐水评估输精管吻合术后的即刻通畅性,结果提示两组术后通畅率相似,但RAVV的手术时间长,且术中弯针、断线等发生率较高[11-12]。2004年Fleming等[13]首次报道了人体RAVV,其后也有多项相关队列研究发表[14-18],证明了RAVV的可行性,并在精确操作、消除震颤、提高术者舒适度等方面存在显著优势,建议RAVV可作为MAVV的可替代手术方案之一。
表2 两组NASA-TLX量表结果的比较
本研究应用国产内窥镜手术机器人实施大鼠输精管RAVV与MAVV的队列比较研究,以验证新的手术机器人系统在机器人显微外科手术的可行性。吻合采用了10-0尼龙线的单层吻合技术,既往有研究显示,应用10-0或9-0,单层、双层或三层缝合,术后通畅率无明显差异[19]。关于术后吻合效果的评价,本研究采用了吻合术后即刻通过吻合口远端2 cm处离断插入24G静脉留置针并滴注盐水评估输精管吻合术后的通畅性,两组术后即刻验证吻合口通畅率均达100%。相较MAVV仅为手术显微镜的简单摆位极短耗时而言,RAVV存在相对复杂的对接过程。RAVV机械臂吻合操作时间明显较长,考虑与术者的机器人显微手术操作仍处于学习曲线内相关[20]。随着手术经验的增多,操作时间可明显下降,既往研究也提示RAVV与MAVV在手术时间方面无明显差异[3]。RAVV术中弯针及断线次数较高,与机器人系统无力觉反馈有关,在持针倒手过程中因双手动作不协调极易导致针弯变形;打结时因10-0尼龙线极细且机械臂力量不易控制导致断线,这些可通过经验积累、视觉反馈逐渐减少[20]。
机器人手术可能是克服显微外科技术挑战最好的辅助手段,如MAVV存在的人手震颤、手腕灵活性受限、显微器械的活动度有限、术者舒适度较差等。而机器人辅助手术通过机械臂消除了术者手臂的生理震颤,同时通过主从运动比例缩放,实现更为精准的操控性。本研究中我们应用NASA-TLX测量表用于评估术者在RAVV与MAVV术中操作时的工作负荷程度。本研究结果显示,脑力需求、体力需求、任务完成情况与努力程度四项,实验组均优于对照组;分析原因,考虑对照组为传统显微手术方式,手术显微镜目镜位置固定,术中术者需保持颈肩固定姿势,且保持双手精细操作,从而导致术者颈肩部僵硬等不适症状;而实验组为机器人辅助,术者控制台为开放式显示方式,手术操作时术者可保持颈部自然姿势并可在术中间断调整颈部姿势,有助于减轻颈部的僵硬感,因此术者整体负荷感有所降低。此外,机器人手术系统所配备的三维高清显示系统,可提供2.5~21倍的光学与数字放大倍率,使术者更为清晰可视输精管微观细节结构,利于显微手术精细操作。
达芬奇手术机器人进入中国已有10余年,在技术积累、学术推广、理念普及、术式研发等方面做了大量工作,手术机器人正成为外科发展的重要方向[21]。但其严重的缺点是三高:即购置费用高、手术成本高、维修保养费用高。在中国,仅有部分中心城市的大型医院能配置,同时其耗材价格也极其高昂,造成很多普通收入家庭无法享受到较为先进的机器人手术治疗,也明显阻碍了机器人在男科显微手术领域的推广应用。
苏州康多机器人公司自主研发的内窥镜机器人手术系统,已完成临床前动物实验及泌尿外科临床试验应用,各项研究结果证实了其临床应用的安全性及可行性[18,22-26]。国产腹腔内窥镜手术机器人系统的设计较进口同类产品具有诸多优势:(1)该系统为开放式医生控制台。术中术者可保持颈部自然姿势且可间断调整,极大减轻了术者颈部的僵硬感。(2)影像台车上具有三维显示器,台上助手也可直视。(3)悬吊式机械臂+激光定位系统方便对接,三臂系统降低了成本及操作的复杂性。(4)主从运动控制,进口达芬奇仅有1.5∶1、2∶1、3∶1三种比例模式,而国产手术机器人可从1.5∶1~10∶1区间间隔0.5比例调节,支持显微手术的开展。本研究中术者感受选择7∶1为显微外科最佳主从操作比例。
外科机器人手术时代已经来临,机器人辅助显微外科手术有助于术者克服震颤,利于精细操作缝合。成本较高、尚无专项创新系统改进是阻碍机器人在显微外科临床应用的根本原因,而国产手术机器人的低成本及可根据临床开展创新专项研发改进的优势,必将促进显微男科手术的新发展。
综上所述,RAVV术者感受良好,可明显降低传统显微手术的疲劳度,吻合口通畅率与MAVV相似。RAVV可作为MAVV的可行替代方案之一。
