面向配用电的集成化自激磁通门直流电流传感器设计*
2022-09-19袁尧鑫
袁尧鑫, 陈 威,2
(1.温州大学 电气与电子工程学院, 浙江 温州 325027;2.温州大学 乐清工业研究院, 浙江 温州 325699)
0 引 言
电力行业作为实现“碳达峰,碳中和”的主力军,要求构建碳排放的精准感知与能效管理。能效管理系统是电力需求侧管理工作的有效技术工具,能够根据监测到的电参数引导用户合理安排用电,高效用电[1]。同时,为减少系统损耗,更好对接光伏,风力等新能源发电,直流输配电受到广泛关注,智能直流配电系统成为当下研究热点[2-3]。直流电流传感器作为直流智能配电系统电能感知与系统保护的重要二次设备,其性能的优劣直接影响系统的稳定性与可靠性。
1 常见配用电直流传感器
市面常见配用电直流传感器主要包括霍尔式[4]、磁光式[5-6]和磁调制式[7]。捷克理工大学的Ripka Pavel团队和中国电科院周峰等人分别就各类电流测量方法展开研究,分析其优缺点[8-9],其中包含上述3类工业常见直流传感器。直流测量方法性能比较如表1所示。

表1 直流测量方法性能比较
磁光式传感器量程可达mA级,多用于中高压电网、冶金等场合,然而此类产品体积较大且价格昂贵,并不能广泛应用于配电系统。霍尔式设备成本最低,在工业中应用也最为广泛,但其精度受限于霍尔芯片线性度,且温漂较大,可靠性较差。磁调制式传感设备相较于其他方式具备较高的稳定性和精度, 能提高系统量测和保护的可靠性,近年得到大力的发展,但其体积和成本是制约其在工业环境中广泛应用的主要因素。
2 磁调制检测技术
直流磁调制技术源于交流比较仪,本质仍是利用磁芯探头耦合调制信号与待测信号,后利用解调电路解耦,测得待测直流电流大小。传统磁调制技术建立于谐波检测法,其主体电路包括调制信号发生电路和信号解调电路[10],电路相对复杂庞大,且成本较高。磁调制器基本原理如图1所示。
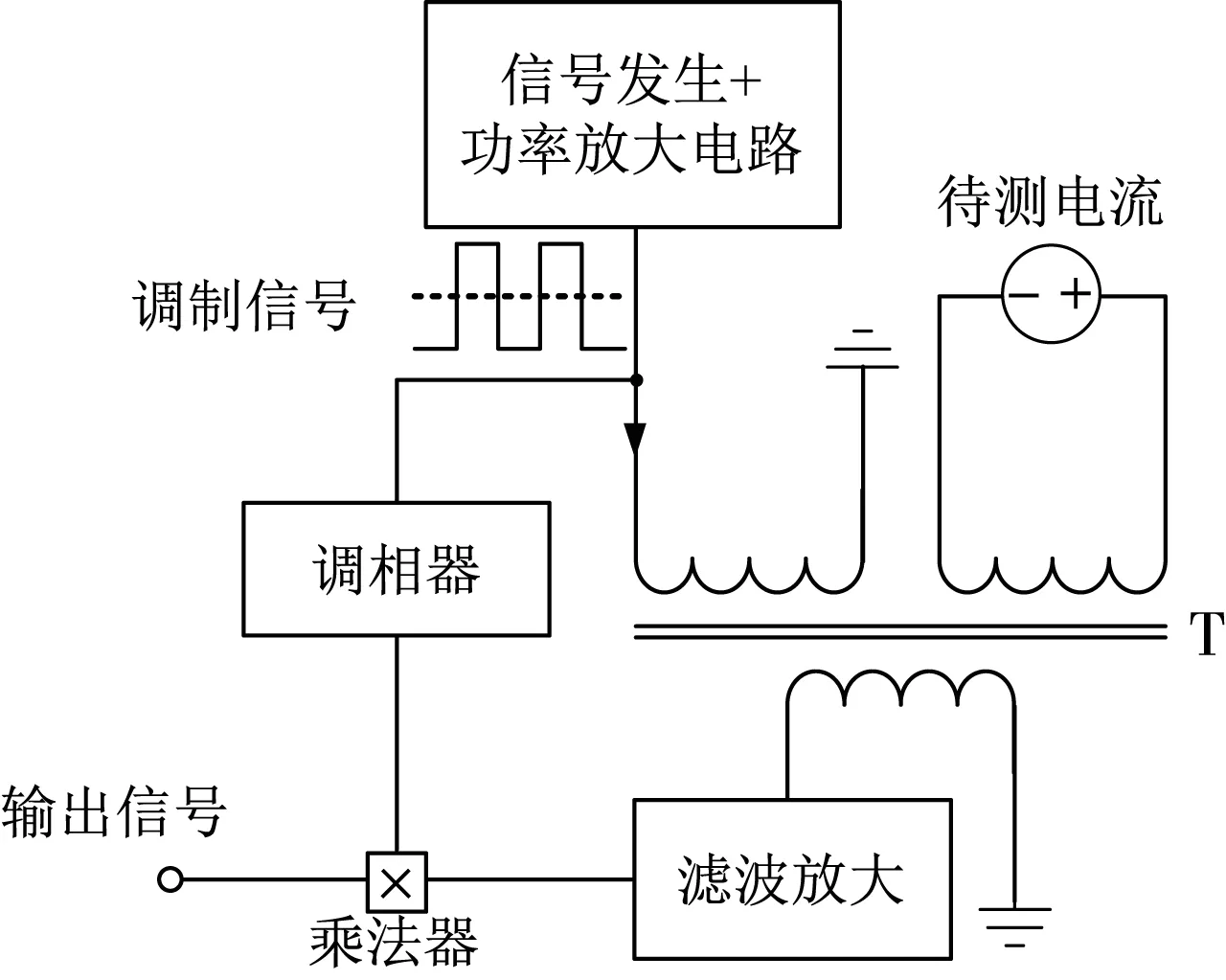
图1 磁调制器基本原理
为克服直流磁调制设备调制、解调电路的复杂性,近些年有学者提出了自激式磁通门测量方法[11]。该方法不需要单独的信号发生装置,结构简单,成本较低,但其线性度较低,测量范围为750 A时,线性度仅能达到1.7%[12]。为进一步降低误差,提出了闭环模型下的自激磁通门传感器,精度最大可达ppm级[13]。现有的自激式磁调制传感设备多用做标准比对和精密测量,完全满足配用电仪器仪表所要求的千分级准确级。但当应用于集测量保护一体化的智能断路器[14]等小型设备中时,其体积过大的缺陷十分凸显,贸然地减小体积又会因磁芯饱和加速而降低量程与精度。
以某630 A直流塑壳断路器为例,其内部空间所能容许的最大磁芯探头外径为58 mm,比较部分电流额定值相近的磁调制传感器的探头外径、精度和量程。磁调制直流电流传感器参数比较如表2所示。由表2可知,面对狭窄的传感器装配空间,现有产品和研究成果的体积在量程尚且不足过载20%的前提下超出了安装空间的限制,并不适用于智能配电用塑壳断路器。如何在保证精度和量程满足配用电测量要求的前提下,做到体积的减小,成为亟待解决的问题。

表2 磁调制直流电流传感器参数比较
采用自激式磁通门原理作为测量手段,同传统磁调制电路相比降低了电路复杂性,减少了电源与信号调理电路所需的制板空间。同时利用非线性的反正切模型推导出传感器的开环系统模型,同传统三段式模型相比更贴合实际系统,为之后的多目标联合优化提供更加精准的目标函数。随后利用多目标遗传算法(Multi-Objective Genetic Algorithm,MOGA)进行体积和精度的联合优化[15],力求在量程足够,精度可达0.2级的前提下进一步缩减体积,使其可以应用于智能塑壳断路器内部等狭小的测量场所。最后通过仿真和实物验证方案的可行性,补全了现有方案中无针对狭窄配用电空间用直流电流传感器设计的空缺。
3 开环系统设计
3.1 开环自激振荡原理
开环系统基本电路如图2所示。
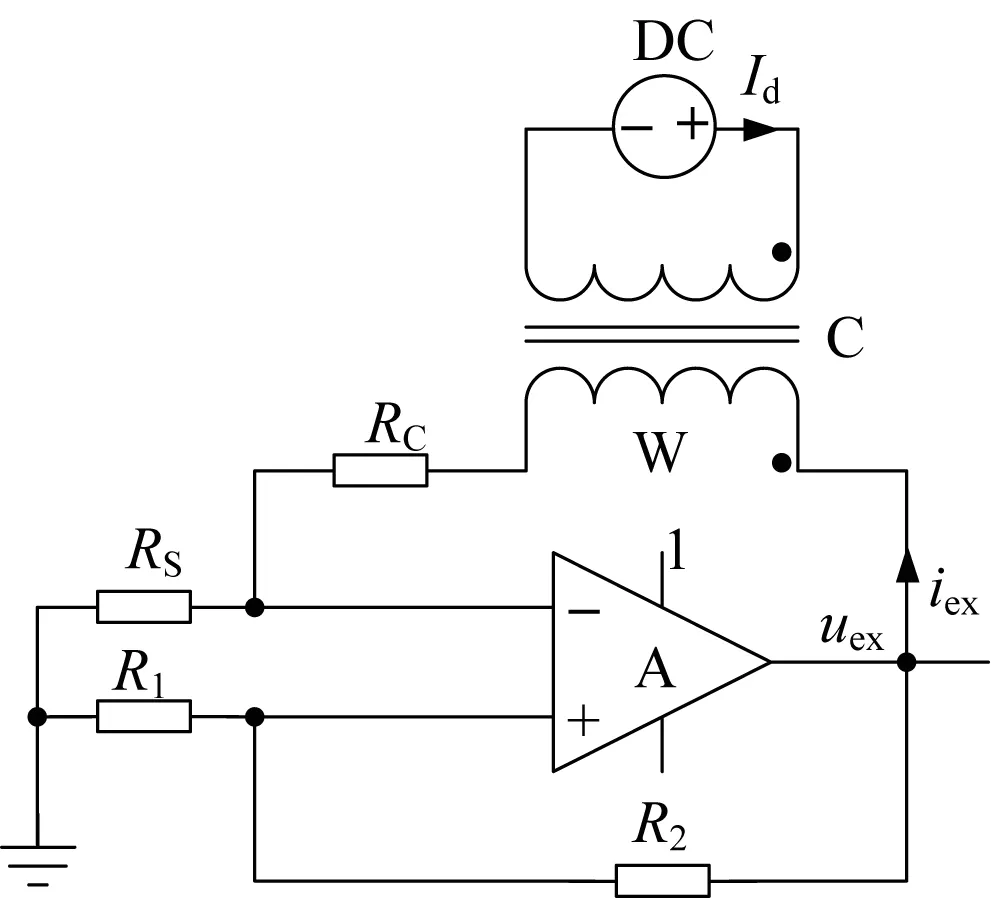
图2 开环系统基本电路
图2中磁芯C和绕组W共同构成传感器探头,Id为待测电流,iex为激磁电流,Rs为激磁电流采样电阻,Rc为传感器探头绕组,R1和R2用以设定比较器同向输入端电压。上述电器元件和磁性元件共同构成RL多谐振荡器,即开环样机的基本拓扑。
上电瞬间,假定比较器A输出高电平,电阻R1上建立同向输入电压,同时使激磁电流从零开始升高,由于激磁绕组的存在,故电流不能突变。磁芯饱和前,电流缓慢上升,磁芯饱和后,电流迅速上升。随着电流增大,RS上电压升高,超过比较器同相输入电压时,激磁电压发生翻转,输出低电平,激磁电流开始下降,下降过程同上升过程相同,起振完成。电路稳定后,激磁电压uex呈方波,激磁电流交替上升下降。C的磁化曲线、激磁电压uex与激磁电流iex波形如图3所示。同常见电磁元件不同的是,传统传感器磁芯多要求磁芯工作于线性区,即非饱和区,而自激式磁通门传感器磁芯要求其交替工作于饱和区和非饱和区。如此才可在待测直流偏磁信号不为零时,使磁芯正、负饱和点激磁电流绝对值不同,激磁电流发生畸变,不再对称,从而进一步分辨待测电流幅值。因此,双向饱和特性是自激式磁通门传感器维持其正常工作的一重要特性。

图3 C的磁化曲线、激磁电压uex与激磁电流iex波形

3.2 基于反正切曲线的平均激磁电流模型
平均电流法是求解激磁平均电流同待测电流间的数学关系,即传感器传变特性。传统磁通门磁调制传感器的建模和理论分析均基于三段式折线磁化模型,该模型假定磁芯磁化过程在饱和区和非饱和区均呈线性,以此将振荡周期进行分段分析。该模型简单,适用于原理验证与初步设计,但该模型无法提现饱和拐点处的动态过程,会对优化设计结果造成一定的影响,不适宜为优化算法提供数学模型。本文以磁芯的反正切磁化曲线模型为基础进行开环测量方案的验证,以及电磁参数同非线性度关系的求解。
反正切磁化曲线模型为
B=atan-1(bH)
(1)
其中,a=2Bs/π,b=πμ0μm/2Bs,μ0=4π×10-7。
式中:Bs——饱和磁感应强度;
μ0——真空磁导率;
μm——相对磁导率。
当待测电流为负时,磁场强度H(t)为
H(t)=N[iex(t)+Id1]/lm
(2)
其中,Id1=Id/N。
式中:N——绕组匝数;
lm——磁芯有效磁路长度;
Id1——归算后待测电流;
Id——待测直流电流。
根据B-H反正切拟合曲线可以求得电感L随激磁电流的变化情况。
(3)
式中:Ψ——电感磁链;
S——磁芯截面积;
dB/diex——磁感应强度随激磁电流变化率。
(4)
结合KVL定律以及元件的VCR,则
(5)
式中:UH——方波激磁电压uex的幅值。
针对正、负半周进行分段简化计算为
(6)
其中,IH=UH/(Rs+Rc)为稳态电流。
带入电路初始条件为
iex(0)=-Im,iex(Tp)=Im
(7)
两端积分求解Tp和TN为
(8)
其中,C=N2Sab/lm, D=bN/lm。
E=tan-1[D(Id1+Im)]-tan-1[D(Id1-Im)]
G=2[D(IH+Id1)]2+1
H=2[D(IH-Id1)]2+1
可进一步求得平均激磁电流Iex为
(9)
式(9)为反正切函拟合函数模型下开环系统的标准传变模型,但该模型仍无法准确看出待测电流同激磁电流平均值之间的线性关系。为验证该模型,做进一步简化。实际电路中通常存在IH≫Im≫Id1,忽略对数项,则
(10)
存在IH≫Id1,式(11)可化简近似为
Iex≈-Id1=-Id/N
(11)
上述推导证明本方案下,待测电流同激磁电流平均值之间存在近似线性关系。
4 开环参数优化设计与仿真验证
4.1 基于MOGA的开环参数优化
开环样机是直流磁通检测的主要组件,其性能直接影响闭环样机的性能。同时闭环样机探头尺寸极大程度上取决于开环样机探头尺寸。为实现精度达到0.5级且探头尺寸足以集成于断路器内部,采用MOGA对系统电磁参数进行多目标联合优化。
精度σ以标准传感器线性度函数为评价指标为
(12)
式中: ΔYmax——实际输出同理想直线之间的最大误差,理想直线利用最小二乘法求得;
Y——最大测量范围。
尺寸则以绕线之后的探头外径Dex为评价指标,为
Dex=Dexc+i·Dexl
(13)
式中:Dexc——磁芯外径;
i——绕组层数;
Dexl——漆包线直径。
对应上述目标函数,传感器设计过程中对其影响较大的参数包括最大磁导率μm,饱和磁感应强度Bs,激磁绕组匝数N,有效磁路长度lm,采样电阻Rs,翻转电压比R2/R1和激磁电压幅值UH等7个的特征参数。其中最大磁导率和饱和磁感应强度由铁芯材料所直接确定,不易更改,故仅选取N、lm、Rs、R2/R1和UH等5个特征参数进行优化设计。
目标函数确定后,进行优化特征参数的选取,3.2中开环模型的特征参数共有7个,考虑到实验并不具备磁芯材料生产能力,最大磁导率和饱和磁感应强度参数按1K107铁基纳米晶材料参数选取,故可优化的系统特征参数仅有激磁绕组匝数N,有效磁路长度lm,采样电阻Rs,翻转电压比R2/R1和激磁电压幅值UH。
根据开环系统工作原理设定约束为
(14)
优化算法选择MOGA多目标遗传算法,MOGA原理如图4所示。

图4 MOGA原理
代入式(8)、式(9)的开环数学模型和式(12)~式(14)的目标函数与约束条件,末代种群的pareto解集如图5所示。
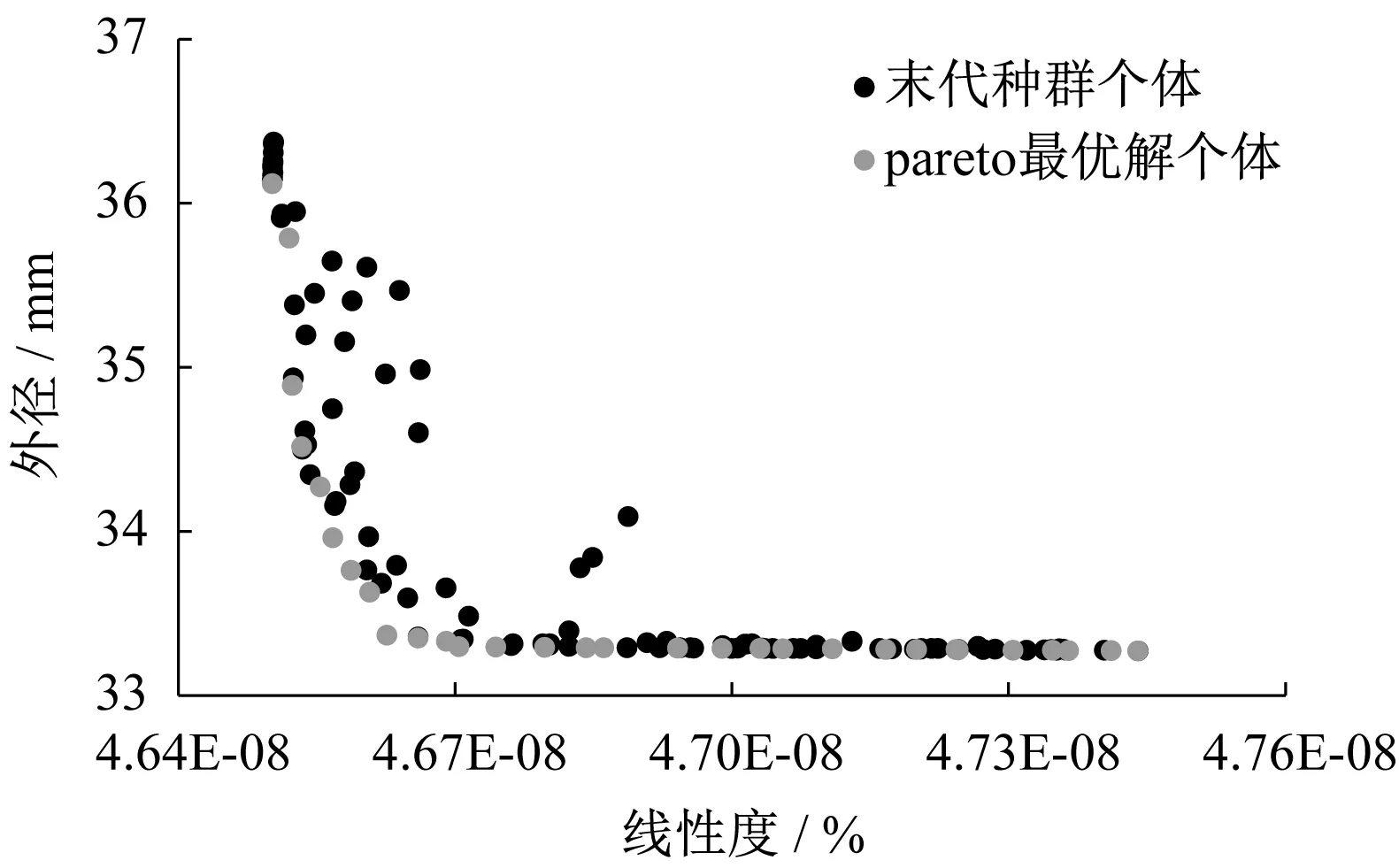
图5 末代种群的pareto解集
图5中为MOGA算法迭代结束后,末代种群个体与pareto最优解集个体在目标函数平面上的位置。其中pareto最优解个体在整种群中位于左下部,处在整个末代种群的边界上,更趋向于平面原点(0,0),即形成末代种群的pareto边界,不被种群中其他个体所支配,为优解。其余个体则落于边界右上方,被边界上的个体所支配,为劣解。迭代结束时,种群个体大多已进化至边界附近,体现了其收敛性,实现了MOGA在开环系统体积与精度联合优化设计中的应用。
4.2 优化仿真验证
为验证优化方案与优化结果的可行性和先进性,利用电路设计软件Multisim进行仿真对比。仿真中磁芯参数采用厂家提供的B-H磁化曲线表数据,利用Space语言中的Table函数导入非线性铁芯绕组模型中,尽可能贴合实际结果。仿真测量时因开环电路量程较小,故仅测量对比10~200 A。
为验证优化结果的可靠性,选择pareto解集中的某一解,将其参数带入仿真电路中,统计其优化限定量程内误差变化。随后改变五个特征参数,保证其外径相近,分别记作优化方案与方案1、方案2。再次仿真后计算其误差变化。基于反正切模型的优化方案同其他方案对比如表3所示;优化前后误差对比如图6所示。
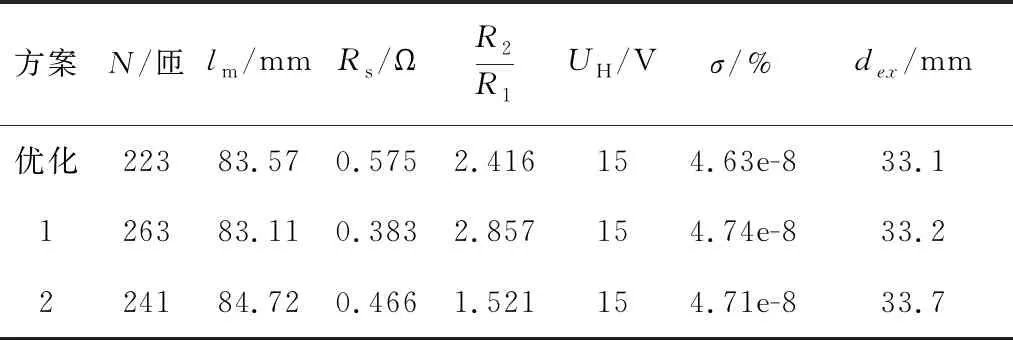
表3 基于反正切模型的优化方案同其他方案对比

图6 优化前后误差对比
由图6可见,3个方案最大误差都在待测电流10 A处,其中优化方案的最大误差仅为1.02%,远小于方案1和方案2的2.46%和2.14%。10~200 A测量范围内,反正切优化方案下的平均误差仅为0.45%,方案1和方案2的平均误差分别为1.10%和1.02%。对比分析可知,优化方案在体积一定的前提下,其误差最小,验证了该优化方案为pareto最优解。
为验证反正切模型下MOGA算法的先进性,将传统的三段式模型带入优化算法中,求取该模型下的最优解集。考虑到体积模型简易且精准,两种优化算法仅会在误差上存在差异,故二者的pareto最优解集中找到体积相近但线性度不同的优化方案,将反正切优化方案记为X1,三段式优化方案记为X2,带入仿真电路中。基于三段式模型和反正切模型的优化方案对比如表4所示。

表4 基于三段式模型和反正切模型的优化方案对比
分别将二者特征参数带入仿真电路中,统计其误差,基于三段式模型与反正切模型的优化结果误差对比如图7所示。
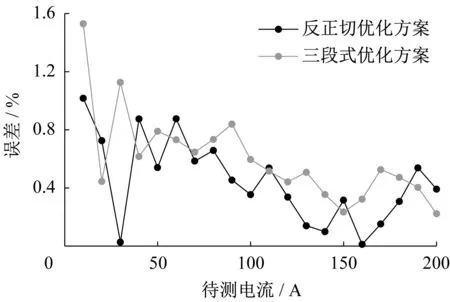
图7 基于三段式模型与反正切模型的优化结果误差对比
分析表4与图7可知,反正切优化方案在体积略小于三段式优化方案的同时,最大误差为1.02%,降低33%,整体平均误差为0.45%,降低25%。即完全pareto支配,反正切模型下的pareto解更优。验证了更贴合实际的反正切模型在优化过程中可以迭代至更优的种群,获取更优的pareto边界。更高质量地实现了MOGA算法在该领域的应用,体现了非线性反正切磁化模型下MOGA算法的先进性。
5 闭环电路设计
5.1 闭环电路拓扑
开环系统要求磁芯必须在一个周期内具备双向饱和特性,但随着待测电流的增加,激磁电流波形将逐渐丧失某一饱和区域,铁芯仅工作于非饱和区正或负向饱和区,此时定义为特性丧失点。该点测量误差最大,系统濒临崩溃,也是开环系统的最大测量点,约束了测量量程。随着磁芯体积的缩小,有效磁路长度迅速减小,达到特性丧失点速度加快,量程也就进一步缩小。
为实现大电流的测量,在优化好开环系统的基础上增加磁反馈回路,构成闭环系统,实现零磁通测量。闭环系统中,激磁磁芯内偏磁信号同反馈信号相互抵消,近似只存在激磁信号,故闭环系统中测量量程仅取决于反馈电路参数,受特性丧失现象的影响较小,可扩大量程。电路采用新型的三磁芯四绕组结构,闭环系统基本电路如图8所示。
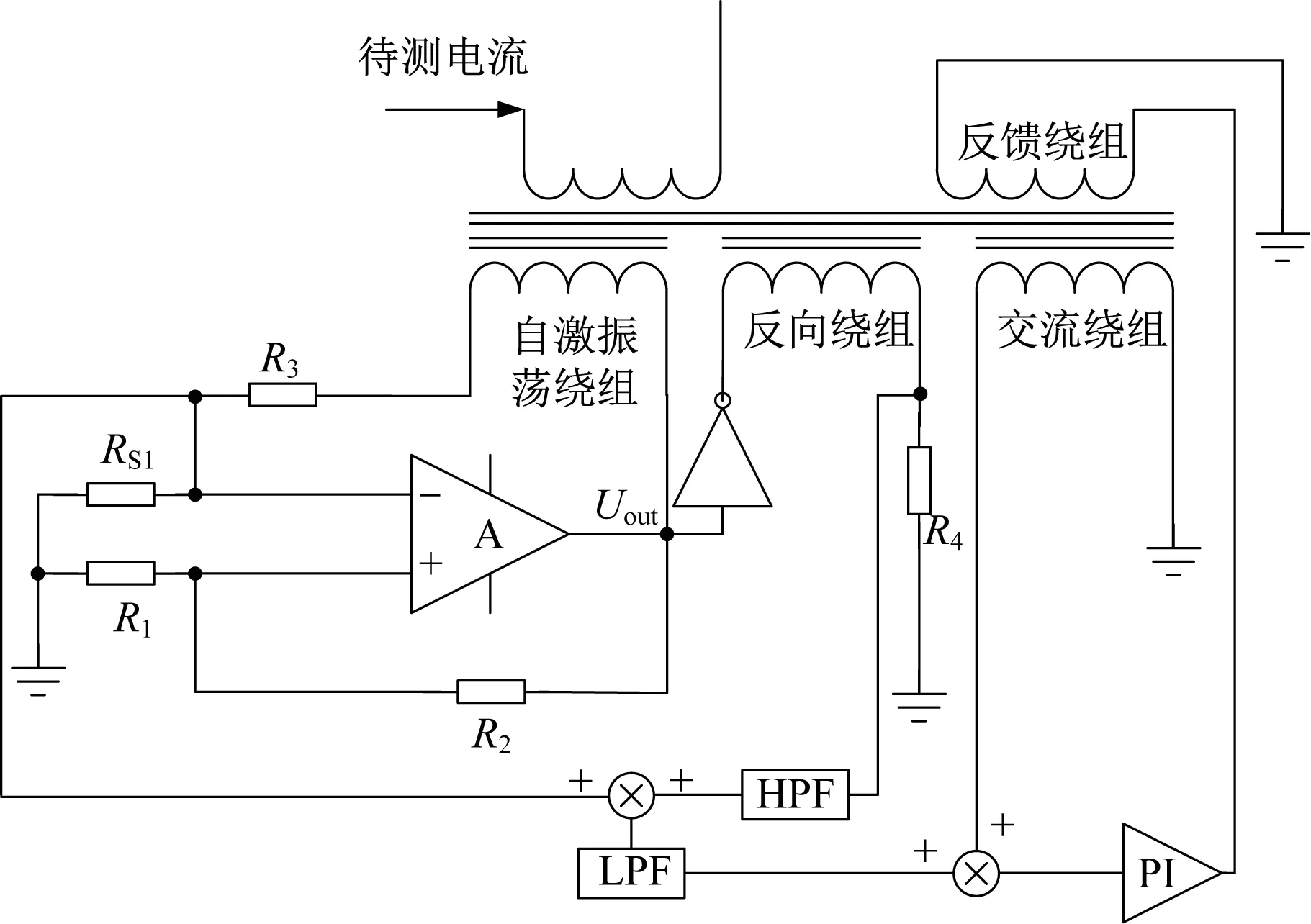
图8 闭环系统基本电路
该闭环系统主要包含以下几个部分:
(1) 自激振荡电路。由运放,自激振荡绕组和外围电阻构成,主要用以产生调制信号,形成双向饱和电流。
(2) 反向电路。由反向器和反向绕组构成,对前级RL多谐振荡器的输出电压波形进行反向处理,用以进行磁链抵消,降低传导和感应纹波。根据其原理可知,反相电路和自激振荡电路输出波形的对称性是决定闭环系统精度和可靠性的关键。
(3) 信号处理电路。由加法器和滤波电路构成,实现直流信号和振荡信号的解调,降低传导纹波,提供直流反馈信号。
(4) 交流电流。用以降低因自激振荡电路和反相电路不对称所产生的感应调制纹波。
(5) 积分反馈电路。由运放,阻容元件和反馈绕组构成,实现磁通补偿。
通过以上电路结构,实现在最大输出功率约束下,反馈信号同待测电流呈线性相关,即Id=NfIf,实现零磁通。
5.2 闭环方案仿真验证
利用Multisim对闭环方案进行仿真验证,闭环系统仿真激磁电流和反馈信号波形如图9所示;闭环系统仿真误差如图10所示。
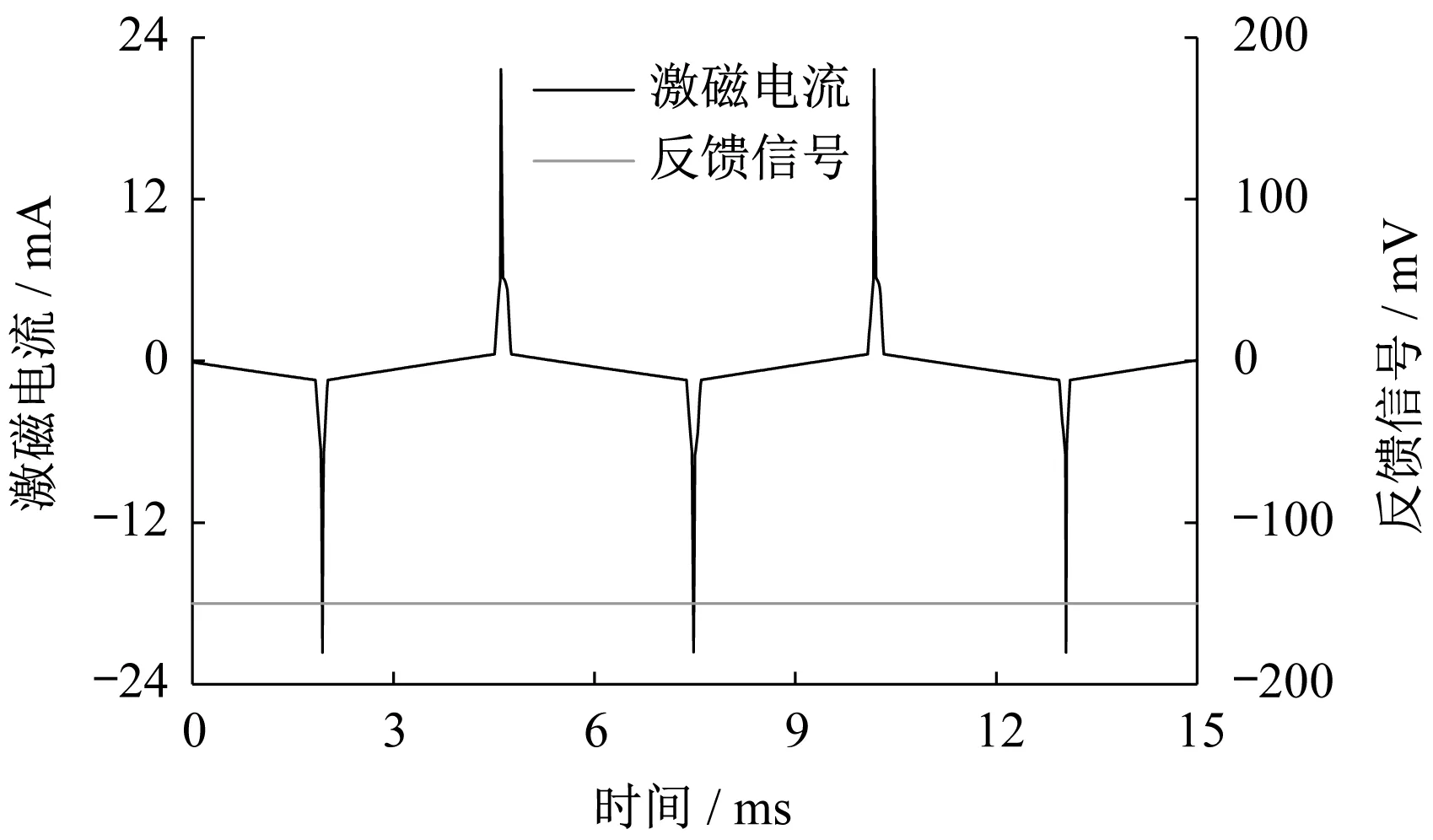
图9 闭环系统仿真激磁电流和反馈信号波形

图10 闭环系统仿真误差
由图9可见,待测电流为600 A时,闭环系统中激磁电流正负半周仍近似对称,探头近似处于零磁通状态,反馈信号近似为一条直线,仅在激磁磁芯饱和处出现短暂的波动,该波动主要由激磁电流同反向电流不能完全对称所致。可以测得30~800 A直流电流,对比GB/T 20840.8可知,针对额定值为630 A传感设备,测量误差优于0.1级。国标中关于误差限值的规定[16]如表5所示。
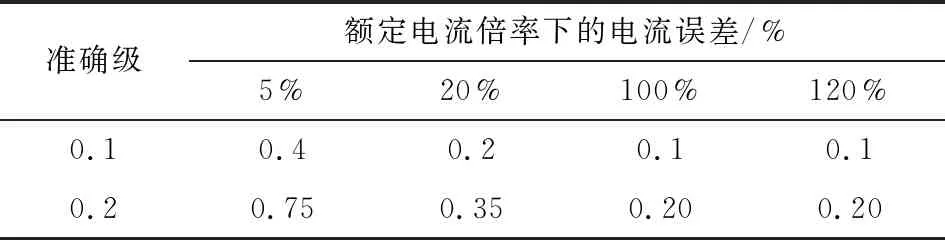
表5 国标中关于误差限值的规定
由表5可知,仿真系统误差完全满足0.1级电流传感器需求,相较于开环系统,量程扩大,误差缩小,初步验证了闭环方案的可行性。
6 试验验证
结合图8中的基本电路拓扑,选择合适的精密运放与阻容参数进行实物设计。磁芯选择新兴的1K107铁基纳米晶合金磁性材料,该材料具有较高磁导率,同时相较于传统坡莫合金价格更低,可以在保证性能的同时有效降低成本。传感器绕组和探头参数如表6所示;基于参数优化的传感器样机如图11所示。
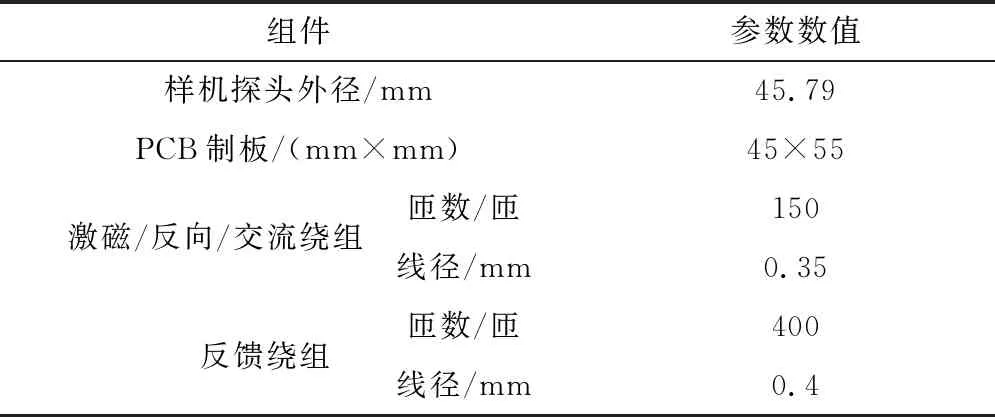
表6 传感器绕组和探头参数

图11 基于参数优化的传感器样机
为降低测试装置引入的误差,采用TDK-Lambda GSP10-1000(最大输出电流1 000 A,最大输出功率10 kW)直流电源作为待测电流输出用功率电源,保证待测电流幅值满足需求;以LEM IN1000-S (精度3 ppm)电流传感器和ZLG PA6000H(精度100 ppm)功率分析仪构成的测量装置作为对比用标准源,保证误差计算可靠;采用Agilent 34420A(精度30 ppm)七位半高分辨数字万用表和Fluke 289C(精度250 ppm)数字万用表作为样机参数测量仪表,减小因参数误差带来的计量误差。样机激磁电流和反馈信号波形如图12所示;样机误差如图13所示。

图12 样机激磁电流和反馈信号波形

图13 样机误差
由图12可知,样机激磁频率为184.1 Hz,激磁电流峰值约为25 mA,反馈信号波动最大处出现于激磁电流饱和点。而图13表明,最大测量电流可达900 A,误差全量程不超过0.2%,平均误差仅为0.038 5%。相较于仿真结果,考虑元器件一致性差异以及实验过程中存在的环境干扰,反馈信号波动和误差有所增大,但可认为仿真基本可以反映实际情况,进一步证实了闭环系统的可行性。同时根据试验结果,计算样机900 A测量范围内最大线性度误差为0.073%,对比表4国标误差要求,闭环实物样机完全满足0.2级传感器要求。
闭环电路芯片存在上电零点偏移,为验证上电零点稳定性,对传感器样机进行重复上电实验。切除待测电流,上电后等待15 min,随后进行3 min测量,取测量结果的最大值与平均值进行统计,测量结束后关机等待半小时,重复上述实验,共做15组。开机重复上电试验结果如图14所示。
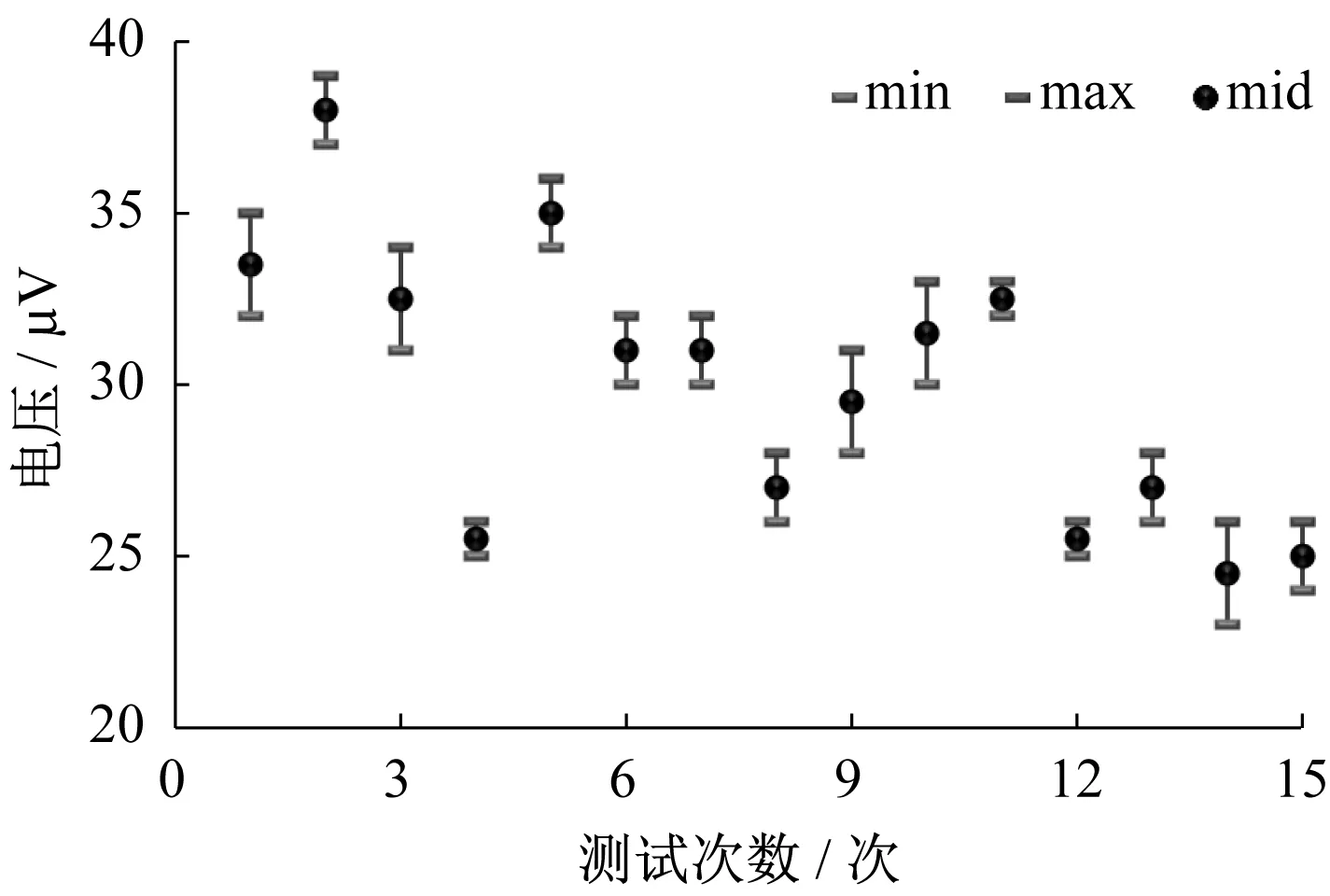
图14 开机重复上电试验结果
由图14可知,15次的重复上电试验并未出现零点电流明显波动,样机零漂平均值的标准差为3.93 μV,零漂重复性误差约为1.95 ppm,其上电重复性表现良好,验证了测量结果的可靠性。
7 结 语
针对市面现有商用直流磁通门电流传感设备无法满足目前高精度集成化测量需求的现状,研究了自激式磁通门传感器的基本原理,进行优化设计,并开展了仿真与样机试验,结论如下:
(1) 非线性反正切磁化曲线模型相较于传统的三段式拟合模型更加贴合实际磁化曲线,更真实地反映激磁周期内磁芯磁导率变化过程。所得到的自激式磁通门传感系统模型更准确,更好地服务于MOGA算法对设计参数进行联合仿真。
(2) 闭环系统可以在不增加探头外径的前提下,有效地避免出现双向饱和特性丧失现象,从而大大提升传感器测量量程与精度。
(3) 根据优化结果所设计的传感设备具备宽量程、高精度与小体积特征,相较于磁通门传感器龙头企业LEM公司cab产品,在保证线性度的前提下,外径缩减25%,精度优于国标0.2级要求,量程拓宽后可满足630 A智能塑壳断路器电流量测需求。
(4) 当前设计缺乏对闭环系统的准确建模与优化,下一步将围绕闭环系统进行模型建立,对其厚度、误差以及功耗进行进一步的优化;同时本设计仅实现量测需求,后续将进一步扩大量程以满足保护需求,形成智能配电用塑壳断路器的全新方案。