直行工况下分布式电动汽车四轮转速同步控制
2022-09-19周雅娣许鸣珠
周雅娣,许鸣珠
(石家庄铁道大学机械工程学院,河北石家庄 050043)
0 前言
电动汽车的发展与普及可以有效解决汽油车带来的环境问题。轮毂电机作为分布式电动汽车的驱动电机,其同步协调控制是电动汽车研究的重点技术之一。在多轮毂电机同步协调控制中,各电机转速响应快慢和电机之间转速同步误差的大小是衡量电机协调控制的重要指标。电机同步控制方式主要包括耦合和非耦合两种。非耦合式电机的输出只反馈给自身控制器。耦合同步方式的电机输出除了反馈给自身控制,还会反馈给系统中其他电机控制。在耦合控制中,将电机自身的跟踪误差和电机间的同步误差反馈给电机控制器,对各电机进行控制,有助于减少多电机系统的跟踪误差和同步误差。
目前常用的多电机同步控制包括并行控制、主从控制、交叉耦合控制以及偏差耦合控制。为了提高系统的同步控制精度、增强系统的鲁棒性,研究人员将现代控制方法与已有的控制策略相结合,提出了各种适用于多电机传动系统的同步控制方法。文献[11]中采用偏差耦合控制结构,提出一种新型超扭曲非奇异快速终端滑模面控制方法,实现了多电机转角的同步控制。文献[12]中基于改进型交叉耦合结构,设计多变量快速广义预测控制器,实现了网络化的多电机比例同步控制,但是系统中存在随机时延等问题。文献[13]中在相邻交叉耦合的基础上改进了算法,设计了模糊PID控制器,对非线性、时变等系统具有较好的控制效果,实现了多电机的比例同步控制,但该结构在干扰大、电机多的情况下可能会使系统不稳定。文献[14]中提出一种带PI补偿控制的改进型偏差耦合控制结构,但是计算过于复杂。文献[15]中提出了多电机同步控制的模糊神经网络学习算法,实现多台电机的相邻耦合误差同步控制策略,但是收敛速度过慢。
主从同步控制结构简单、容易实现,但同步精度不高;交叉耦合同步控制提高了同步控制的精度,但算法和实现都较复杂。交叉耦合控制控制结构简单、同步控制性能较好,但不适合2个以上电机控制。而偏差耦合控制能够克服上述几种控制策略的缺点,实现很好的同步性能,因此本文作者采用偏差耦合控制策略对多电机进行同步控制研究。
为了改善上述算法的不足,提高分布式电动汽车四轮转速的同步性能,本文作者基于偏差耦合控制策略,设计了新的速度补偿器及转矩状态观测器,并在Simulink以及与CarSim联合仿真中来验证该控制策略的可行性和有效性。
1 PMSM矢量控制
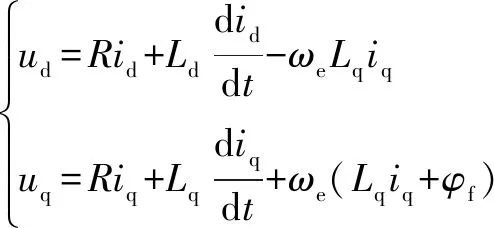
PMSM在同步旋转坐标系下的数学模型如下:
(1)
(2)
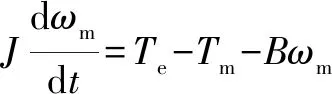
此时的电磁转矩方程可以写为
=[(-)+]
(3)
式中:、分别为定子电压的d、q轴分量;、分别为定子电流的d、q轴分量;、分别为d、q轴的电感分量;为定子电阻;为转子电角速度;为永磁体磁链;为转动惯量;为电机的机械角速度;为阻尼系数;为负载转矩。
在PMSM磁场定向控制中,为了使输出转矩最大,通常令=0,电机的转矩方程为
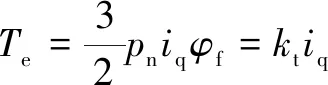
(4)
此时电机方程(2)可写为
(5)
矢量控制是通过坐标变换来对磁链与转矩进行解耦,形成转子磁链定向的两相参考坐标系,从而可以模拟直流电机的控制方法。
2 多台电机偏差耦合控制算法
偏差耦合控制策略的基本思想是将某一台电机的转速与其他电机转速分别进行比较,将得到的转速偏差相加后作为该电机的转速补偿信号,用以补偿各个电机之间转动惯量的差异。该控制策略可用于2台以上电机的控制,控制系统结构如图1所示。
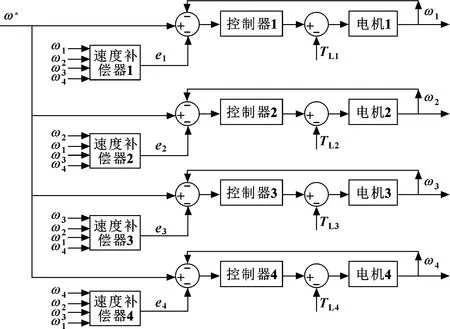
图1 偏差耦合控制结构
图1中:4台电机代表4台永磁同步电机;控制器采用矢量控制;、、、分别用来表示4个不同的负载干扰;、、、分别为4台电机的实时转速输出。
速度补偿模块是偏差耦合控制中最重要的部分,为每个电机提供速度补偿。速度补偿器在偏差耦合控制中发送的补偿信号由该电机的实际转速分别与其他3个电机的实际转速做差以后再求和得到的。以速度补偿器1为例,其结构框图如图2所示。
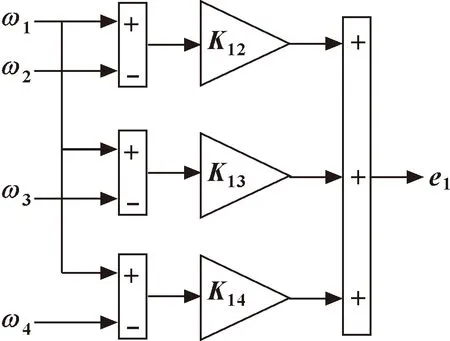
图2 速度补偿器1结构框图
图2中:、、、分别为4台电机的输出转速,将速度之间做差比较的结果作为速度补偿信号反馈至信号补偿点。、、分别为每两台电机速度差的反馈增益系数,其目的是为了补偿电机之间转动惯量的不同,其大小值可以表示为
(6)
式中:为控制电机的转动惯量;为与控制电机速度作差电机的转动惯量。
文中选取的3个电机参数一致,增益都是1。从图2可知,第1台电机的速度补偿值可用下式表示:
=(-)+(-)+(-)
(7)
同理可以得到第2台电机的速度补偿值:
=(-)+(-)+(-)
(8)
第3台电机的速度补偿值:
=(-)+(-)+(-)
(9)
第4台电机的速度补偿值:
=(-)+(-)+(-)
(10)
2.1 改进型速度补偿器设计
传统速度补偿器采用固定增益只考虑了电机转动惯量的影响,没有考虑系统负载变化较大时对系统稳定性的影响。对于单台电机而言,其他任意一台电机的速度波动都是一种干扰,这种干扰是可测且经常变化的。因此,本文作者提出了一种改进型偏差耦合控制,以速度补偿器1为例,原理如图3所示。
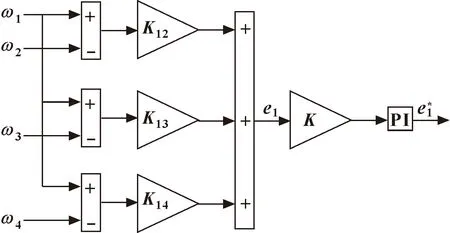
图3 改进速度补偿器1结构框图
2.2 仿真验证
为了验证所提改进速度补偿器对改善多电机同步运行的优点,在相同的控制器参数下,设给定参考速度=500 r/min,4台电机初始负载转矩均为0。在0.1 s时,设定电机2突加负载转矩3 N·m,电机3突加负载转矩6 N·m,电机4突加负载转矩9 N·m。取=0.5、=10、=0.5。以4台永磁同步电动机为例,利用Simulink建立系统的模型,进行了仿真实验,分别得到采用固定增益速度补偿器和改进速度补偿器控制下系统的同步误差曲线,如图4—图5所示。
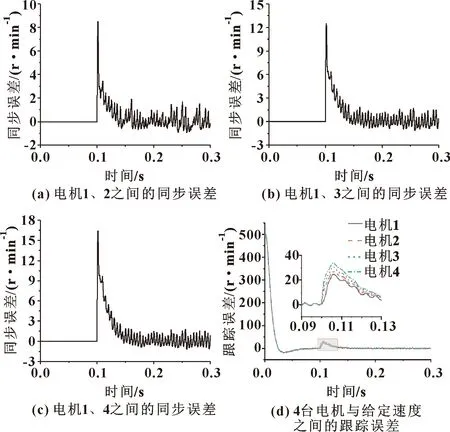
图4 采用固定增益速度补偿器4台电机同步误差
图5 采用改进速度补偿器的4台电机速度同步误差
3 基于转矩状态观测器的改进型速度补偿器
3.1 转矩状态观测器设计
由第2节可知:所设计的改进型速度补偿器可明显降低系统的同步误差值,但是对降低各电机之间的跟踪误差值作用不明显。为突出跟踪误差补偿量的作用,设计了转矩状态观测器进行补偿。以电机1为例,系统的控制框图如图6所示。
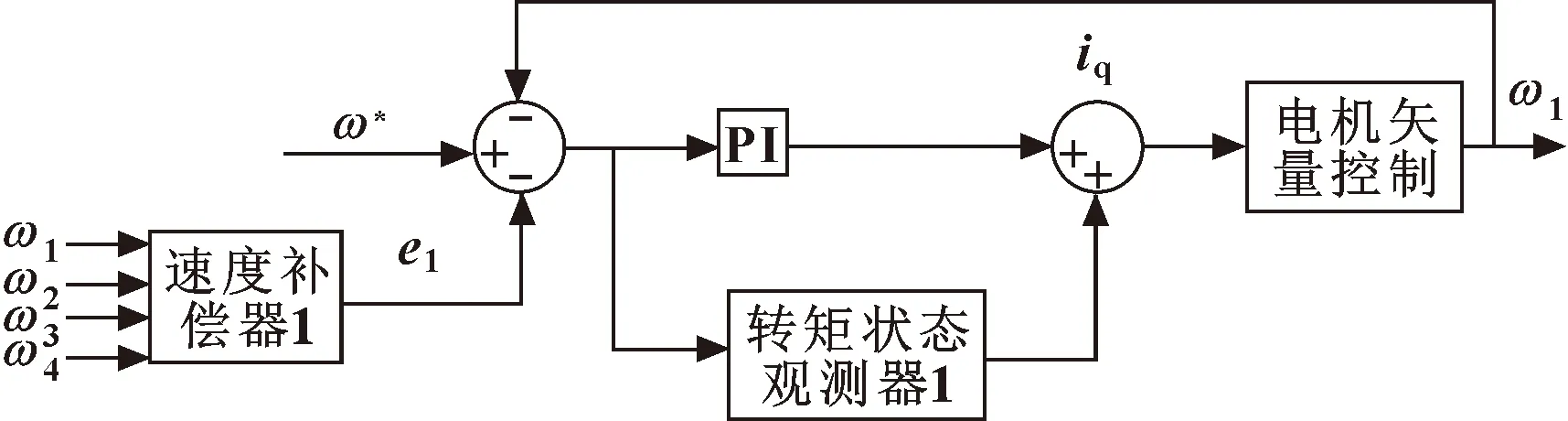
图6 基于转矩状态观测器的改进型速度补偿器控制原理框图
在加入转矩状态观测器对电流前馈补偿后,q轴转矩参考电流由速度控制器的输出转速分量与给定转速和实际输出转速的差值分别经过PI和转矩转矩状态观测器两部分,使得负载转矩的变化直接影响电机的同步性能。
将式(3)改写为状态方程的形式为
(11)

构建的观测器如下:
(12)

(13)
则其特征方程可表示为

(14)
根据极点配置法,设期望极点为、。观测器的期望特征多项式可表示为
-(+)+=0
(15)
当摩擦因数忽略不计时,由式(14)—(15)可得:
(16)
则式(13)可表示为
(17)
转速误差信号经过一个PI运算后可以得到负的等效负载转矩分量,转矩状态观测可表示为
(18)
3.2 仿真验证
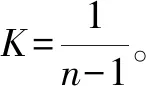
为验证基于转矩状态观测器的改进型速度补偿器控制方式的有效性,在Simulink中进行仿真实验,仿真条件与以上两个控制方式相同。4台电机之间的速度同步控制误差如图7所示。
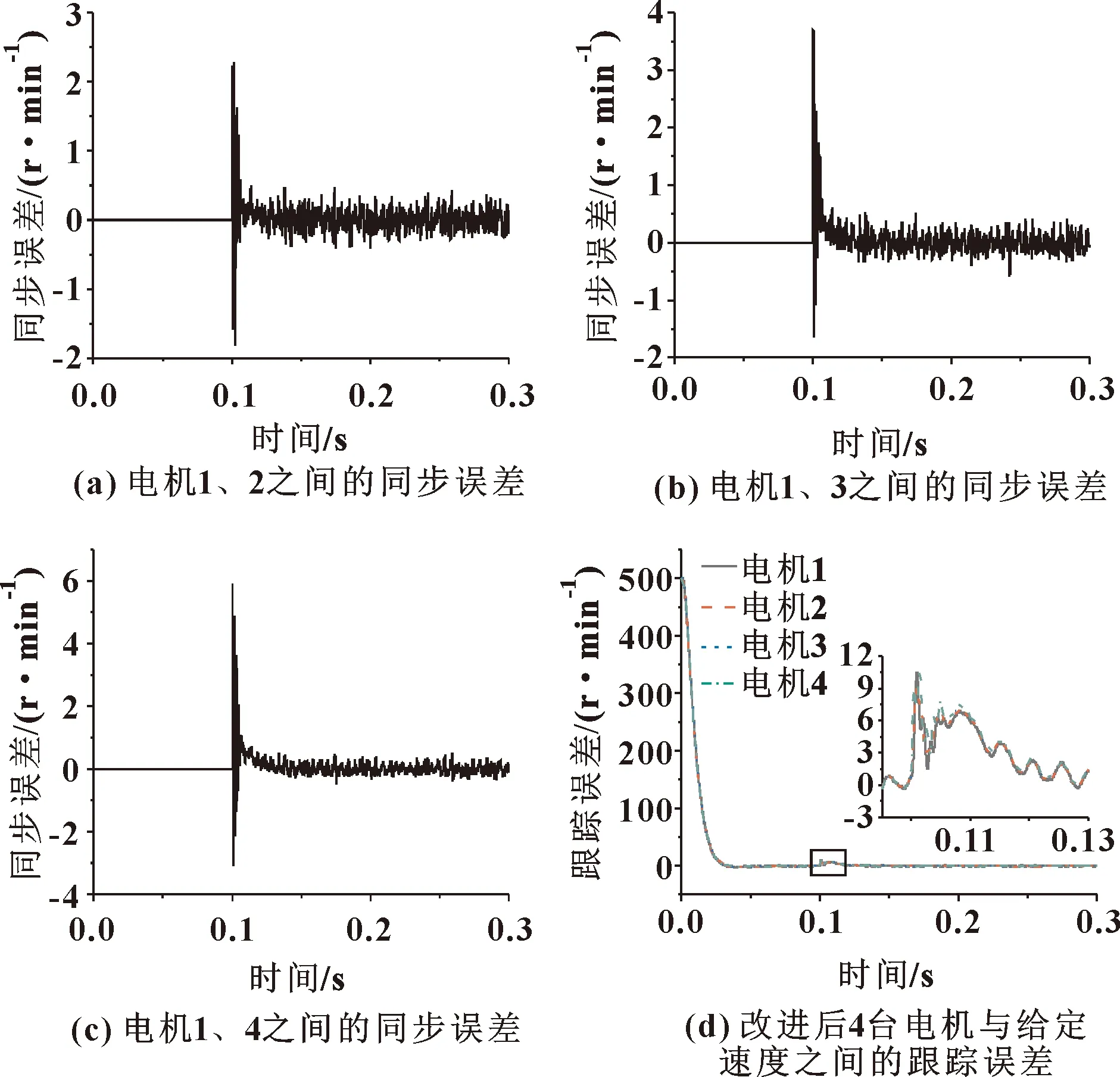
图7 基于转矩状态观测器改进速度补偿器的4台电机速度同步误差
对图4、图5和图7所得的仿真实验结果进行数据分析,如表1、表2所示。
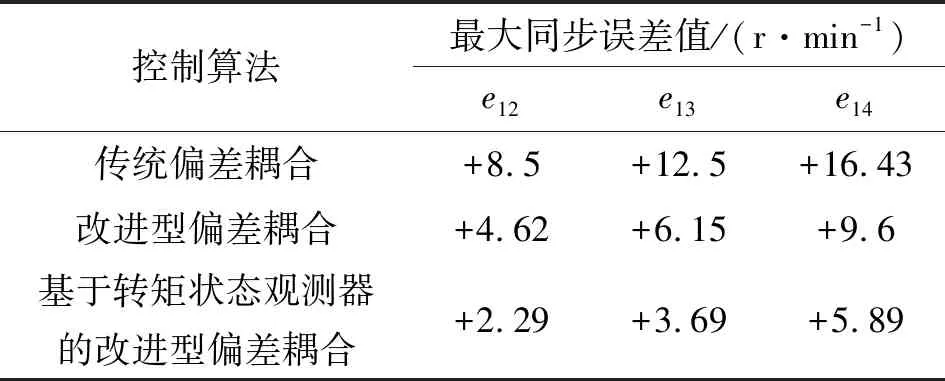
表1 3种控制方式下各电机之间的最大同步误差值
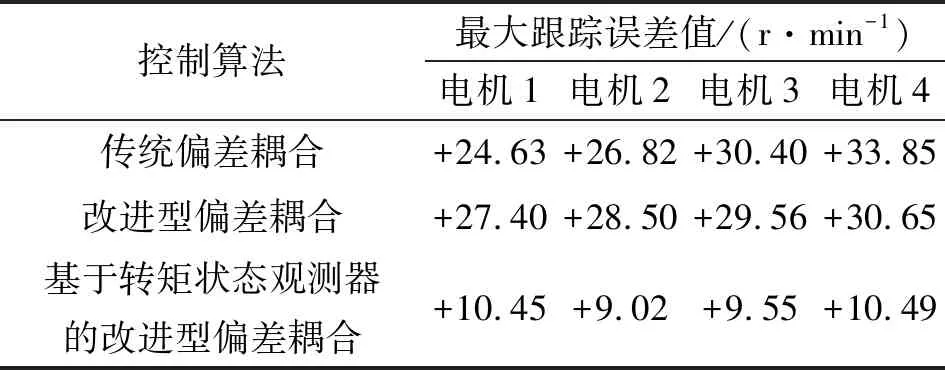
表2 3种控制方式下各电机之间的最大跟踪误差值
从仿真结果图4、图5、图7和表1、表2可以发现:改进型偏差耦合控制能够有效降低最大同步误差,但是对最大跟踪误差改进效果不明显;文中所提的基于转矩状态观测器的改进型偏差耦合同步控制相较于前两种控制方式不仅降低系统同步误差的性能最好,且能有效降低系统与给定速度之间的跟踪误差,在负载变化时,可尽快恢复至给定值,鲁棒性较好,证明了该同步控制算法的有效性。
4 模型验证
为了进一步验证文中所提控制策略,基于CarSim建立了分布式电动四轮汽车整车模型,基于Simulink建立整车传动模型。通过设置CarSim联合仿真输出设置,构建分布式车辆转速的联合仿真平台。文中建立的CarSim与Simulink联合仿真原理如图8所示。为了保证建模的准确性,需正确设置电机转矩的输入接口。此实验平台为轮毂驱动电动车,因此其接口设置如表3所示。
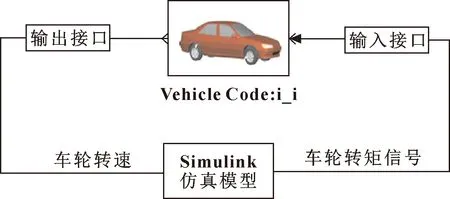
图8 联合仿真原理

表3 CarSim与Simulink联合仿真输入/输出接口设置
4.1 实验工况设计
利用车辆动力学仿真软件CarSim与算法开发软件Simulink 进行联合仿真,通过不同工况下的车辆稳定性实验进一步验证仿真结果的正确性以及车辆行驶的稳定性。
工况1,高附着系数中车辆高速行驶仿真。设置路面的附着系数为0.9,初始车速为80 km/h,轨迹路线为直线行驶,在距离初始位置50 m处设置一个高为0.05 m的井盖使得汽车左半轮压过行驶。
工况2,高附着系数中高速行驶仿真。设置路面的附着系数为0.9,初始车速为80 km/h,轨迹路线为直线行驶。在4 s处,设置车辆右前轮突加100 rad/min的转速。
4.2 模型对比结果
质心侧偏角是表征车辆稳定性的重要状态量,理想状态下的质心侧偏角为零。不同路面状况下侧偏角的极限值不同,当车辆处于高附着的沥青路面时,侧偏角的极限值为12°左右;当处于冰面时,侧偏角的极限值为2°左右。对于做曲线运动的车辆,在满足车辆操控性的前提下,车辆的质心侧偏角应尽可能地小。在2种工况条件下,车辆4个车轮的输出转速的实验结果分别如图9—图13所示。
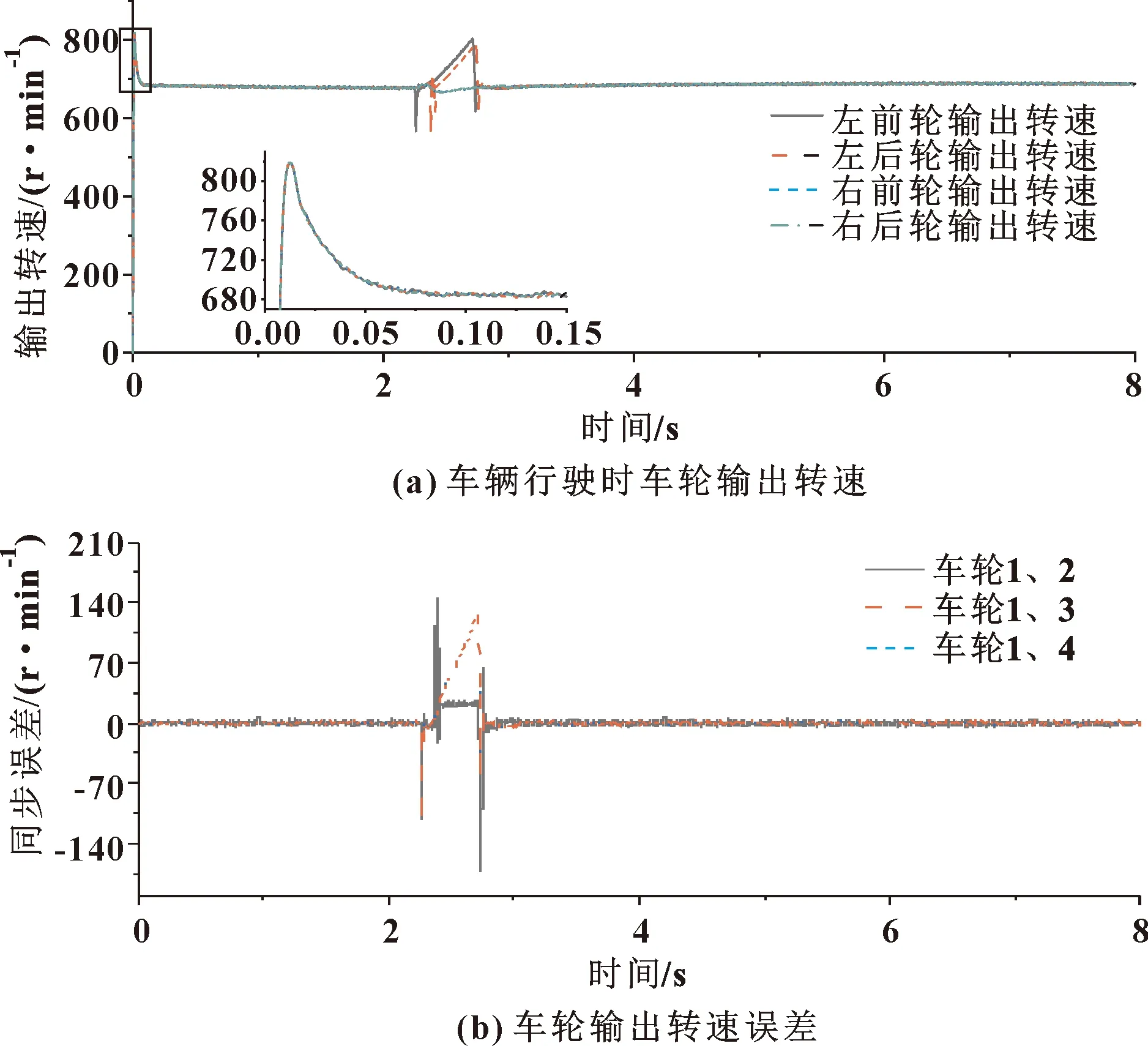
图9 工况1下传统控制时车辆车轮的输出转速
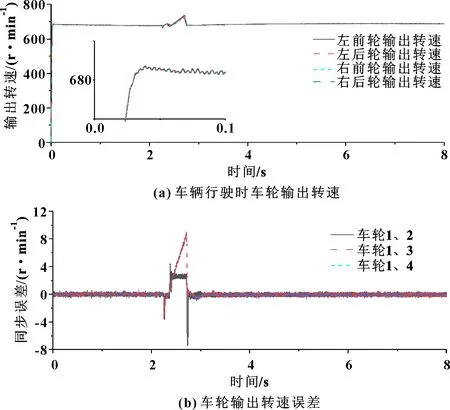
图10 工况1下改进型控制时车辆车轮的输出转速
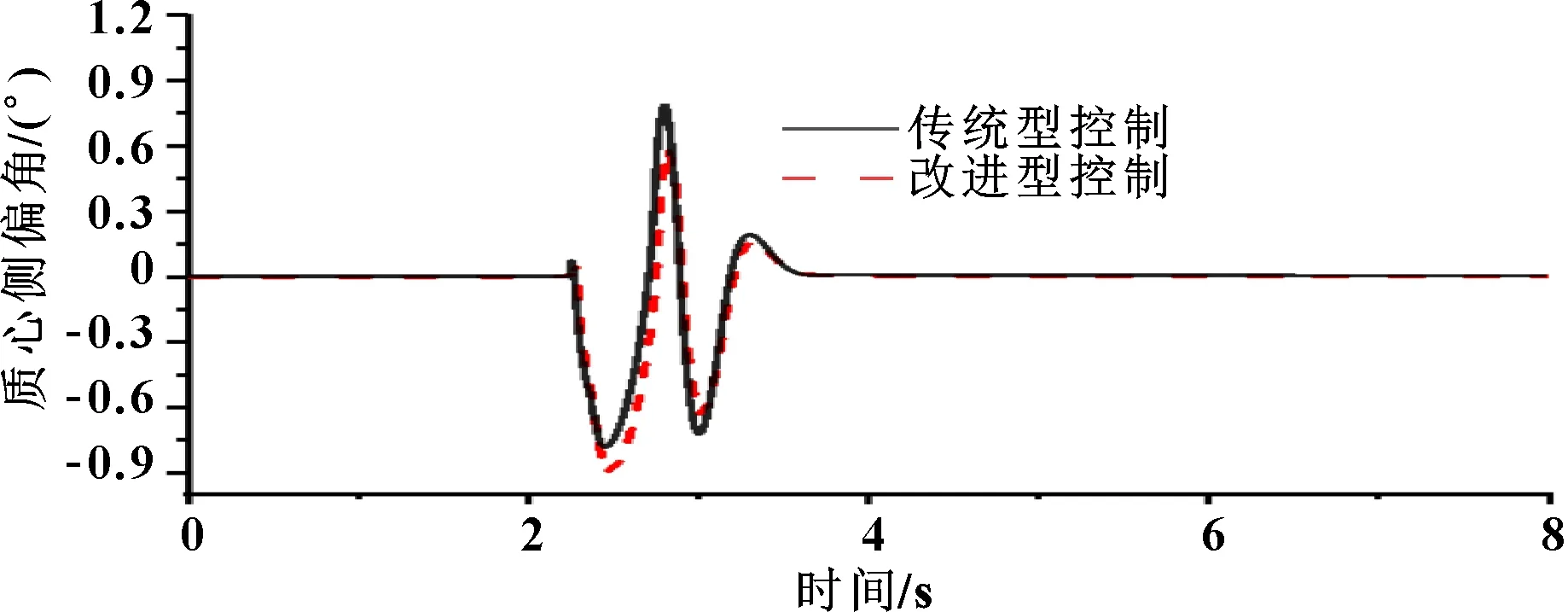
图11 工况1下车辆的质心侧偏角
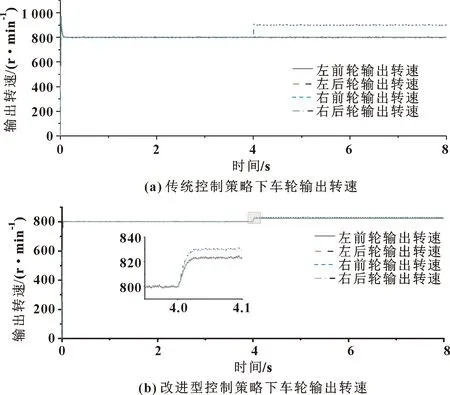
图12 工况2下车辆4个车轮的输出转速
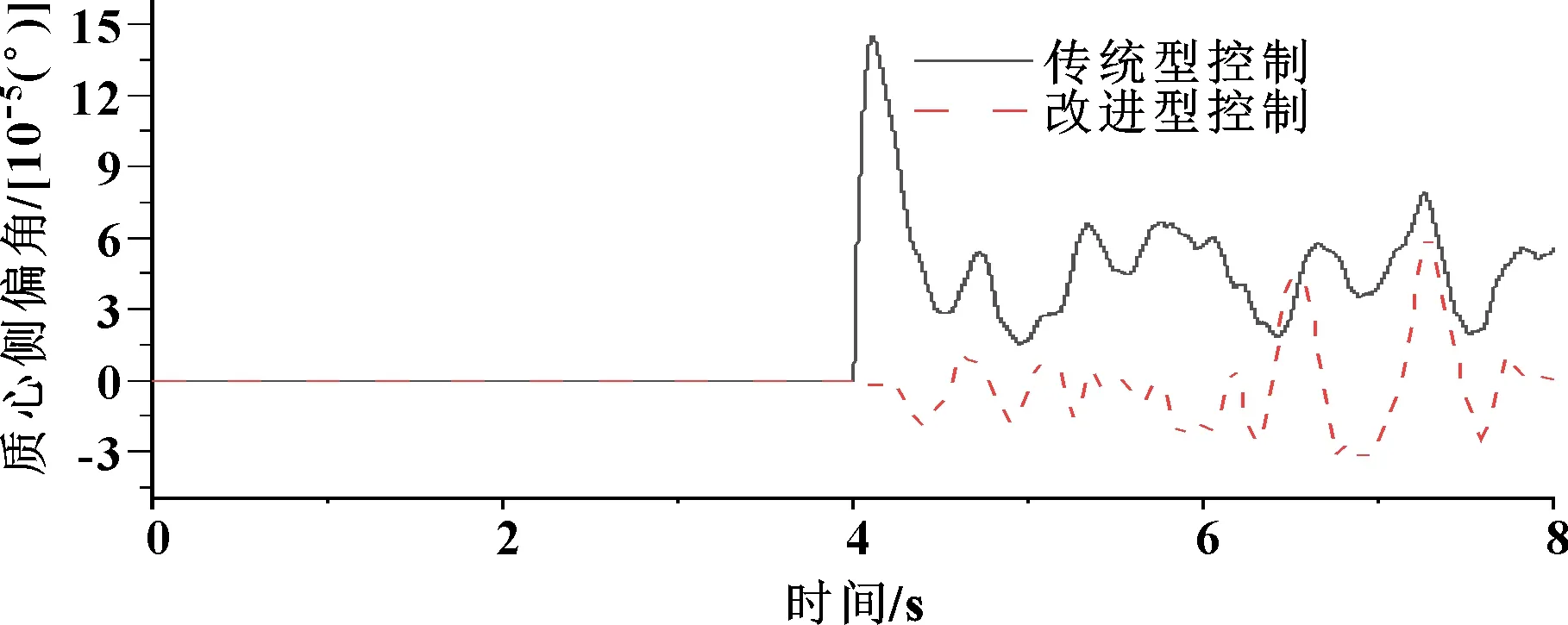
图13 工况2下车辆的质心侧偏角
工况1:相比于传统控制策略,文中所提控制策略趋于稳定的时间更快,超调量更低。当经过所设置的路况时,车轮转速之间的同步误差更低,且能够迅速恢复至给定设定值,车辆行驶更加稳定。
工况2:当在4 s时突然增大右前车轮的转速时,施加控制后的车轮转速能够迅速做出变换,质心侧偏角变化更为平缓,提高了车轮之间的同步性能,具有相对较好的稳定性。
从上述两种工况可以看出:文中控制策略下质心侧偏角波形在0°附近,且波形峰值远小于极限给定值,与传统控制策略相比,其超调量更低,趋于稳定的速度更快,能够有效降低车轮之间的同步误差性能,表明文中所设计控制策略的有效性。
5 结论
针对直行工况下分布式电动汽车四轮转速的同步控制进行了研究,在传统的偏差耦合控制基础上,构建了改进型偏差耦合控制框架,并提出了一种基于转矩状态观测器的的速度补偿控制器。在MATLAB/Simulink 环境下构建了PMSM多电机同步控制系统仿真模型,在给定不同负载转矩下对3种控制方法进行了仿真研究。实验结果证明:文中所提控制方法可以大幅改善多电机系统的同步控制性能,降低了系统的同步误差和跟踪误差。利用车辆动力学仿真软件CarSim与Simulink进行联合仿真,通过不同工况下的车辆稳定性实验证实了所提控制策略的有效性。
