六自由度肩关节康复机器人设计与仿真
2022-09-19张顺程郭亮姜爱民
张顺程,郭亮,姜爱民
(1.中国科学院长春光学精密机械与物理研究所,空间机器人中心,吉林长春 130033;2.中国科学院大学,北京 100049)
0 前言
随着全民健身时代的到来,出现了越来越多的运动损伤病例。运动康复的需求也与日俱增,其中面向肩关节运动损伤,迫切需要更科学、更有效的康复手段。传统康复方式中存在训练效率不高、精确度低与治疗方案单一、康复评价指标不科学等现实问题,特别是无法实现运动能力的恢复与评估的问题,所以研制用于肩关节运动损伤康复的外骨骼机器人样机非常重要。目前,国内外对上肢康复机器人有一定的研究。国外的研究起步较早,技术上有一定的积累,取得了诸多成果。比如GENTLE/S、ARMin系列、CADEN-7、Multi-Joint System、Armeo系列等,都已应用于人体的康复治疗,取得了不错的康复效果。相较于国外,国内的上肢康复机器人研究起步较晚。清华大学、哈尔滨工业大学、华中科技大学等都研制出了各自的康复机器人。随着康复设备市场的发展,很多医疗器械公司也都研发出自己的产品,其中广州一康公司的A6、A2最具有代表性。但大多都集中在上肢多关节集成,专门针对肩关节运动康复的设备很少。本文作者设计了一个多自由度肩关节康复训练机器人,很好地解决了肩关节运动康复的训练问题。文中详细阐述了机器人的运动学建模及仿真问题,并进一步对工作空间进行了仿真,检验了机器人运动学方程推理的准确性及该方案的合理性。
1 机械系统设计
通过解剖学知识可知,由于肩关节结构复杂,为了方便研究,这里将肩关节运动简化为3个正交运动,分别是屈伸/伸展、外展/内收、旋内/旋外(如图1所示)。
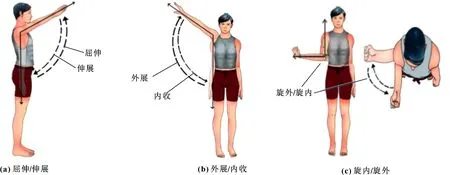
图1 肩关节运动示意
本文作者设计的六自由度外骨骼肩关节康复机器人可实现肩关节3个正交和复合运动。根据解剖学知识,得到肩关节运动角度。为了避免患者康复时受到二次伤害,机器人各关节活动范围都小于肩关节正常活动范围,如表1所示。
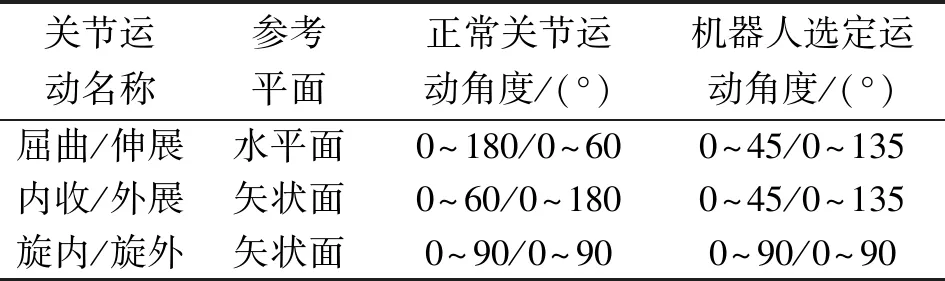
表1 机器人关节运动范围
设计的肩关节外骨骼康复机器人机构简图如图2所示。

图2 肩关节康复机器人结构
机器人共有6个自由度,3个平动,3个转动。3个旋转自由度的轴线相交于一点,与肩关节的轴线和旋转中心重合。L形机械臂通过旋转运动,完成末端的位置调整。机器人末端和半圆环进行旋转运动,可以分别实现肩关节的屈伸/伸展、外展/内收、旋内/旋外。整个机械臂可以进行上下移动,解决了肩关节瞬时旋转中心瞬时可变性的问题,符合人体肩关节运动规律,并对不同患者身高进行高度调节。两个滑台可以对机器人的位置进行前后、左右调节,帮助机器人完成更加复杂的康复运动。
2 运动学分析
采用D-H法对机器人进行运动学分析。根据D-H参数表示方法,并基于本文作者设计的机器人三维模型,建立肩关节康复机器人的D-H坐标系。这里将机器人的运动学模型简化为主要运动的三自由度模型,如图3所示。

图3 肩关节康复机器人D-H坐标系

(1)
它可由4×4矩阵表示为
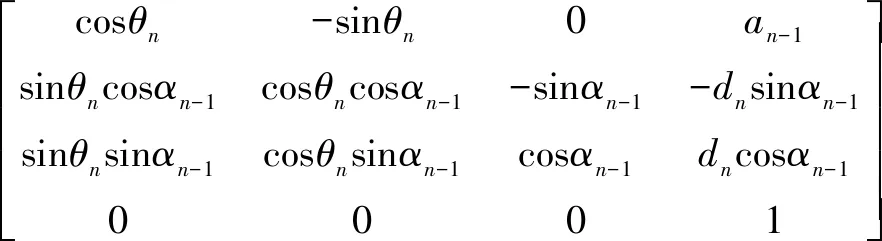
(2)

(3)
康复机器人的D-H参数如表2所示。
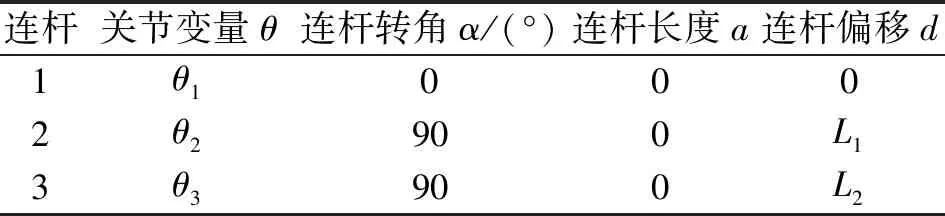
表2 D-H参数


(6)

(7)
=+
=-
=
=-
=--
=-
=
=-
=+
=-
=-
(8)
式中:=sin,=cos。将===0°代入式(7)中得到:

证明了正运动学运动方程的正确性。
3 机器人虚拟样机仿真分析
在验证了运动学公式的正确性后,通过ADAMS虚拟样机技术,对康复机器人的虚拟样机进行仿真,观察康复机器人运动情况,测试康复机器人运行稳定性,然后通过后处理模块的分析结果,对康复机器人机构进行优化改进。将UG软件中建立好的三维模型导出为Parasolid文件,导入ADAMS中,对各个关节添加约束(JOINT)。设计一个多关节复合康复动作,使用STEP函数在各个关节添加驱动。通过ADAMS提供的Model Verify命令检测模型定义是否正确,然后设置仿真时间为10 s,步长为400步,点击仿真开始按钮进行仿真。
仿真得到各关节角速度和输出力矩,如图4所示。可以看出:各关节角速度曲线平滑,运动平稳,没有出现突变,关节输出力矩也在电机选型范围之内。

图4 ADAMS仿真结果
4 机器人末端工作空间分析
机器人工作空间是衡量机器人康复水平的一个重要评价指标,是指机械臂末端能达到的所有空间位置的合集。运用蒙特卡洛法对机器人工作空间进行分析。蒙特卡洛法是基于概率统计理论的一种数值计算方法。利用MATLAB中的rand()函数对取值范围内进行随机抽取,机器人末端作为参考点,结合正运动学方程中得到的位置矢量,生成参考点的集合就是工作空间。其原理公式为
(9)
运用MATLAB中plot3和plot绘图函数画出机器人工作空间的三维云图及平面云图,如图5所示。
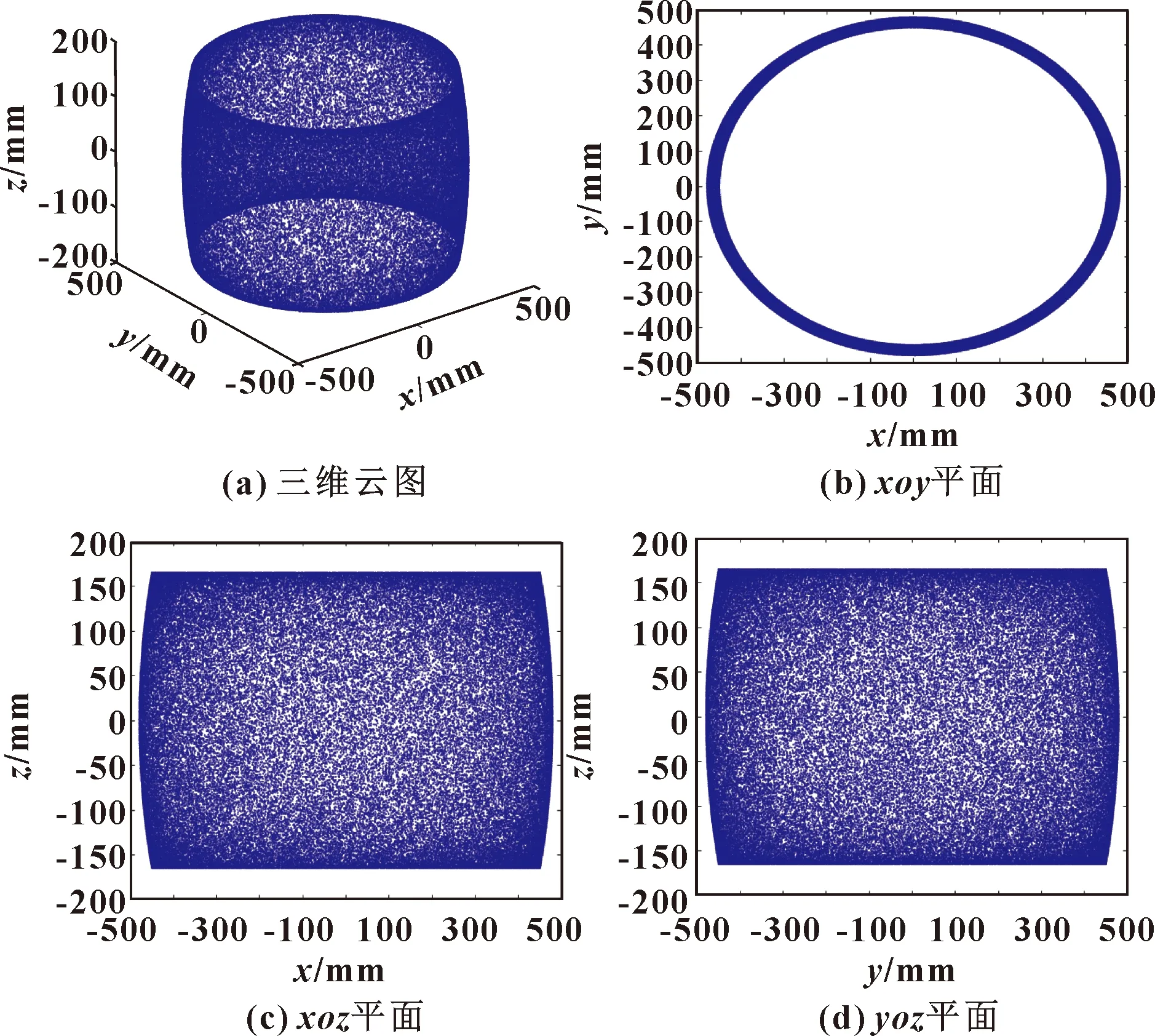
图5 工作空间云点仿真
5 结束语
通过对人体解剖学的分析和肩关节的运动规律,设计了一种面向运动损伤的肩关节康复机器人。完成了对机器人样机整体三维结构模型的设计;采用D-H法推导出机器人的运动学方程,并验证了运动学方程的正确性。其次通过在ADAMS中进行运动学和动力学的仿真,得到结果显示各关节运行平稳,没有突变,各关节输出力矩在选取电机范围内。同时通过MATLAB软件对工作空间进行仿真,验证了本文作者设计的机器人模型方案的可行性和合理性。
