管道检测机器人在垂直输气管道的运动分析
2022-09-19臧延旭赵宣杨博霖白港生姜海洋梁也梁雪婷
臧延旭,赵宣,杨博霖,白港生,姜海洋,梁也 ,梁雪婷
(1.北华航天工业学院机电工程学院,河北廊坊 065000;2.中国石油管道局工程有限公司技术服务中心,河北廊坊 065000;3.中油管道检测技术有限责任公司,河北廊坊 065000)
0 前言
近期发布的《新时代的中国能源发展》白皮书指出中国的清洁能源消费总量正在稳步增加,占能源消费总量的比重达23.4%,相关人士预测在“十四五”期间我国将进一步加大非化石能源和天然气的消费总量。目前几乎100%的天然气是利用长输管道进行输送的,因此,伴随着天然气消费总量的提升,用于天然气输送的管道建设也会进入一个新的高峰期。
长输天然气管道敷设在地下,由于腐蚀、外力破坏等原因可能造成管道发生金属腐蚀、变形等损伤,存在较大的安全隐患。行业内普遍利用管道检测机器人定期对管道进行内检测作业,及时发现管道存在的腐蚀、变形等缺陷,为天然气管道的安全输送提供保障。
目前行业内成熟应用的管道检测机器人主要基于漏磁检测技术,要求机器人在管道内的最大运行速度不得超过5 m/s。机器人使用耐磨弹性橡胶或者聚氨酯材料实现密封,利用管道内输送的天然气提供运行动力,天然气的流速决定了机器人的运行速度。在水平管道或者管道倾角很小的区域,机器人在管道内的运行速度较平稳,但在管道落差较大或者由于管道穿越而存在的垂直管段,由于自身重力原因将会影响机器人运行速度。而对机器人运动分析的研究多集中在水平管道状态,针对山区起伏较大的管道,也主要利用有限元软件分析机器人在自身重力作用下加速运行导致的对管道底部弯头的冲击作用,而对机器人在垂直输气管道内运动分析的理论研究还较匮乏。因此,建立机器人在垂直输气管道的运动模型,推导机器人在垂直管道内的运行速度和运行距离关系式,对于预测机器人运行速度是否满足工业现场检测要求具有重要意义。
1 管道检测机器人受力平衡方程及影响因素分析
如图1所示,管道检测机器人进入管道后,由于弹性皮碗密封作用使机器人前后端建立压差后随输送的气体一起运行,管道检测机器人在一定倾角的管道内运行时,其受力平衡方程为

(1)
式中:为机器人质量,kg;为机器人运行速度,m/s;为机器人后端瞬时压力,Pa;为机器人前端瞬时压力,Pa;为管道内截面积,m;为管道倾角,(°);为机器人运行阻力,N。

图1 管道检测机器人受力分析示意
由式(1)可知,机器人的运行状态与机器人自重、管道倾角、管道输送气体参数、机器人与管道接触等因素有关:(1)机器人自重。一定口径的机器人自重为一定值,一方面自重影响机器人与管壁的接触状态,另一方面当管道处于一定倾角状态时,自重会产生相应的分力。(2)运行阻力。机器人运行阻力包括机器人自身与管内壁接触产生的摩擦力,还取决于管道内杂质类型和杂质量,对于漏磁检测机器人还包括磁路装置与管道间的磁力。由于接触力和磁力的精确理论计算较困难,对不同口径的管道机器人采用牵拉试验的方法进行运行阻力测试,测试结果表明:相同管道壁厚、机器人运行速度不超过5 m/s时,其运行阻力基本不变,且不同口径的机器人运行阻力集中在0.05~0.2 MPa内。(3)管道气体参数。气体的输量和压力决定了机器人的运行速度,也决定了机器人的驱动力。(4)管道倾角。管道存在较大倾角时,重力的分力会对机器人运行状态产生明显影响,尤其对于垂直管道的工况,机器人的自重将产生额外动力驱动机器人加速运动。
所以,对于一定口径的机器人,当管道气体参数、管道壁厚等参数不变时,机器人由水平管道进入垂直管道后,由于机器人自重原因,机器人将做加速运动。
2 管道机器人在垂直输气管道的运动分析
由于重点研究机器人在垂直输气管道的运动规律,为简化分析模型做出以下设定:(1)气体为理想气体;(2)管道内气体为单相介质,牛顿流体;(3)管道直径、壁厚不变,忽略杂质的影响,即机器人在垂直管道的运行阻力为定值;(4)垂直管道足够长,机器人能加速至最大运行速度;(5)管道气体绝热恒温;(6)忽略机器人长度的影响。
2.1 机器人受力分析
如图2所示,机器人进入垂直管道后,先不考虑自重的影响,则机器人在Δ(增量很微小)时间内运行至虚线所示位置,但由于自重的加速作用,实际在Δ时间内机器人运行至实线所示位置,机器人速度增加了Δ,运行距离增加了Δ。此过程中,机器人对前端气体产生压缩作用,而后端气体则会膨胀,受扰动的机器人前后端气体的距离为Δ(扰动波以声速传播),扰动波前气体仍以稳定状态运行,波后气体处于扰动状态,扰动区域内气体的压力、密度和速度均有微小改变。
分别以机器人前后端受扰动的气体为研究对象(作为控制体),根据动量守恒定律,列出扰动的这部分气体在d时间前和d时间后的动量守恒关系式。
机器人前端气体:

(2)
机器人后端气体:

(3)
式中:为机器人后端气体密度,kg/m;为机器人前端气体密度,kg/m;为扰动波传播速度,m/s。动量守恒关系式中,左侧第一项为通过控制体表面动量变化,左侧第二项为控制体内气体动量变化(其中d=d),右侧为控制体内气体所受外力。整理得:
Δ=2Δ
(4)
Δ=2Δ
(5)
对于理想气体:

(6)
式中:为绝热指数;为气体常数,J/(kg·K);为温度,K。则机器人由于加速运动导致的受力增量为

(7)
由式(7)可知,机器人由于加速运行导致的压差增量Δ与气体的密度/压力、扰动波传播速度和机器人的速度增量Δ等因素有关,当压差增量Δ与面积的乘积与自重平衡时,机器人速度增量达最大值。
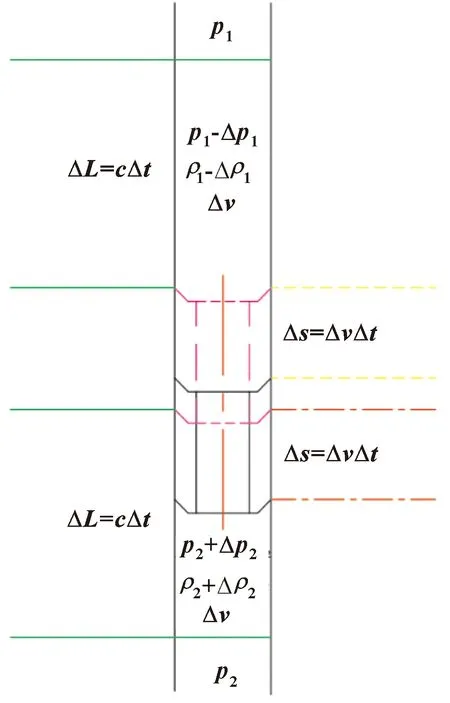
图2 机器人在垂直管道的运行分析简图
以上受力分析是针对机器人在垂直管道向下运行时的状态,根据式(7)可提前预测机器人向下运行时的最大增速值。同样,当机器人在垂直管道向上运行时,借鉴以上分析过程可知,机器人由于自重影响将做减速运行,机器人前端气体膨胀而后端气体压缩,机器人由于减速运动导致的受力增量与式(7)相同,只不过此时机器人前端气体的压力、密度和速度均有微小减小,后端则是微小增加,与垂直向下运行的状态正好相反。同时,在垂直管道向上运行阶段的初始压力与,与垂直管道向下运行阶段的初始压力相比略有增加,这是由于垂直管道气体自身重力的影响。利用式(7)可预测机器人向上运行时的最大减速值,减速过程虽不会导致机器人速度过快而影响检测数据质量,但减速值过大可能导致机器人停止运行问题的发生。一旦机器人停止运行,后端气体会继续压缩增压,直至机器人在一较大压差作用下快速启动,以超过气体流速的速度冲过垂直管道,有可能使机器人超速导致检测数据质量不佳,甚至会对管道造成较大的破坏冲击力。
2.2 机器人加速运行阶段的运行距离分析
如图2所示,当机器人在垂直管道向下加速运行时,机器人虽然加速运行,但其加速度并非常数,由于加速作用导致的压差增量逐步增加,且与机器人重力加速度方向相反,机器人加速度会逐渐减小。将式(7)代入式(1),整理得:
=-Δ
(8)
式中:为机器人加速度,m/s。式(8)可进一步整理为

(9)
=e-[2(+)]
(10)
d=

(11)
式中:d为机器人加速运行距离,m;为机器人初始运行速度,与气体流速相同,m/s。由式(10)和式(11)可知,加速度快速衰减,机器人加速运行距离是加速度和时间的函数。
3 运动方程与数值仿真结果对比
文献[13]中建立了清管器通过“U形”管道的模型,模型所用仿真参数如表1所示。
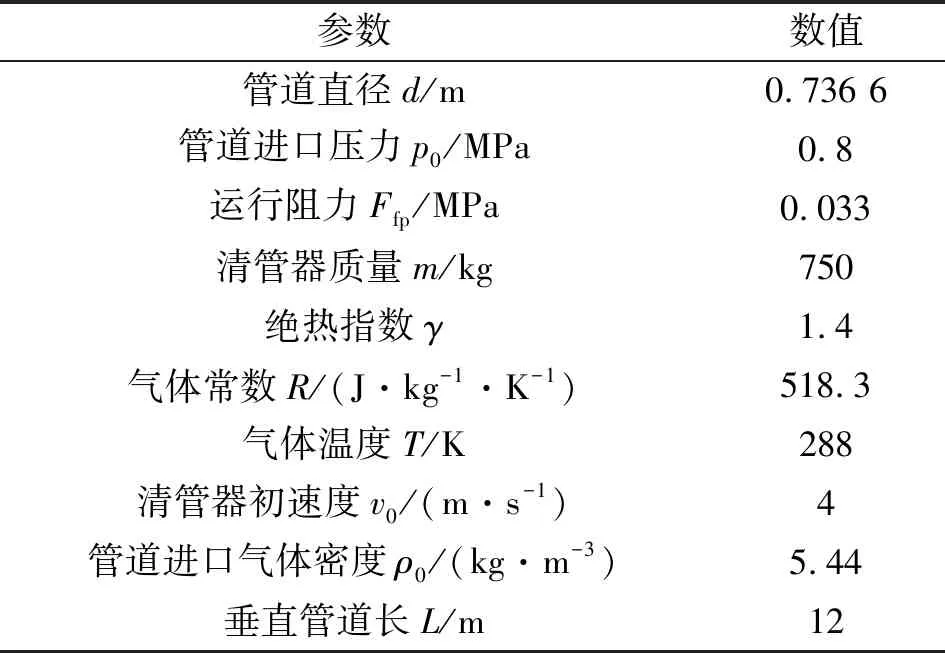
表1 仿真参数
利用式(7)计算清管器在垂直管道运行时的速度增量:

即清管器最大运行速度为=+Δ=5.83 m/s。文献[13]中仿真结果如图3所示(仿真初始条件为进口压力恒定,出口流速恒定):清管器在垂直管道内向下运行时(前12 m运行距离),最大运行速度约为5.8 m/s,且运行速度呈周期性波动,振幅越来越小。计算的最大运行速度值与数值仿真结果基本一致。
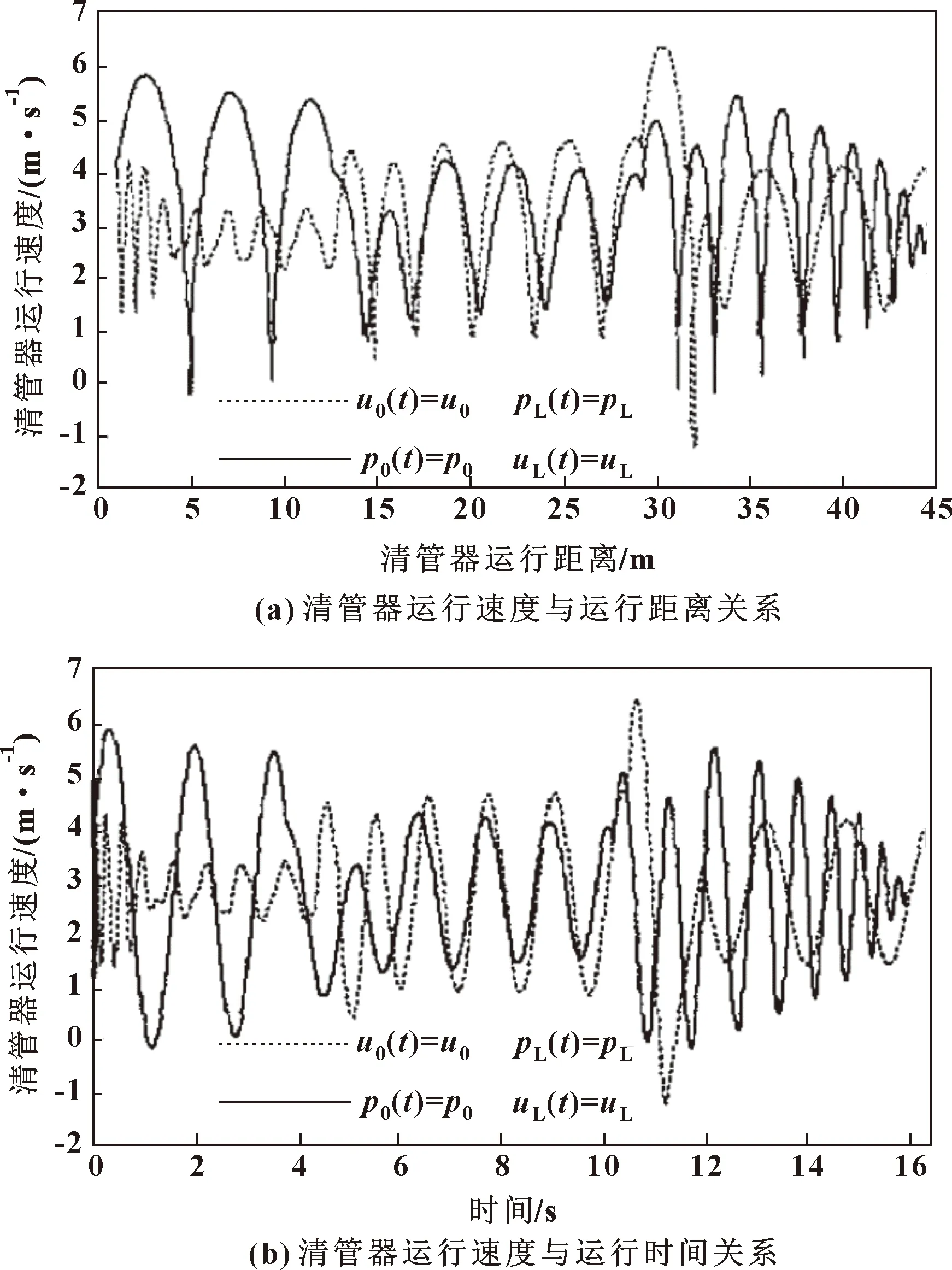
图3 清管器运行速度仿真结果[13]
利用式(10)计算清管器加速度减为0时所需时间(以e为底数的指数函数开始衰减迅速,取减小至初始加速度值的5%时的时间值作为计算结果),当/=0.05时,=0.55 s,即清管器加速时间约为0.55 s。利用式(11)计算在0.55 s时间内,清管器的运行距离,得d=2.22 m。与图3仿真结果对比(仿真初始条件为进口压力恒定,出口流速恒定):清管器在垂直管道内向下运行时(前12 m运行距离),当清管器运行速度第一次达最大速度值时约运行0.5 s,运行距离约为2.5 m,计算的时间和距离与仿真结果接近。
利用式(10)和式(11)计算清管器达最大运行速度时运行的时间和距离,在工业现场应用是不方便的。由于计算时取减小至初始加速度值的5%时的时间值作为计算结果,式(10)和式(11)可分别用以下关系式进行计算:
(12)
(13)

4 结论
利用动量守恒定律建立了管道检测机器人在垂直输气管道向下运行时压力增量与速度增量间的关系式,利用该关系式可计算管道检测机器人通过垂直输气管道时的最大运行速度,以此判断机器人最大运行速度是否超过允许值。同时利用建立的速度增量关系式也可以判断机器人在垂直输气管道向上运行时的速度减小量,可判断机器人是否存在停止运行的风险。建立了机器人在垂直管道向下运行时的运行距离关系式,并对关系式进行了简化,适用于工业现场预测机器人增速运行距离。建立的关系式与数值仿真结果进行了对比,最大运行速度与仿真结果非常接近,机器人加速阶段的运行距离与仿真结果也相近。
由于机器人在工业现场运行时,在进入垂直管道前需要通过连接水平管道和垂直管道的弯头,机器人在弯头处的受力、密封情况较复杂,后续还应根据工业现场实际情况对建立的关系式进行修正,同时对关系式的适用范围(如气体的输量、压力等参数对运行结果的影响)也需进一步研究。
