基于D-S证据理论和模糊理论的工业机器人健康状态评估
2022-09-19张钰曼吴海淼侯红娟
张钰曼,吴海淼,侯红娟
(河北工程大学机械与装备工程学院,河北邯郸 056038)
0 前言
工业机器人的快速发展与广泛应用,使得其健康监测和维护愈发重要。在工业机器人的运行过程中,通过监控整机及关键部件的运行状态,可保证系统的安全性和可靠性。
目前,国内外的研究大部分涉及到的是机器人零部件和系统的故障模拟、性能测试和诊断方法。JABER和BICKER基于小波变换和人工神经网络来诊断工业机器人的关节间隙等级,从而实现机器人关节故障严重程度的评估。INCE等将基于自适应设计的一维卷积神经网络用于电机状态的实时监测。张会彬等设计了一种基于径向基核函数(RBF)神经网络的人工神经网络(ANN)观测器,用于识别机器人的故障。徐龙飞提出基于声发射信号的工业机器人RV减速器故障诊断和识别方法,通过均值聚类方法对特征向量进行聚类研究,实现减速器的故障诊断与识别。但很少有研究评估整个机器人的健康状况。模糊理论有较强的处理不确定模糊性问题的能力。邱文昊等应用模糊综合评判法,使用隶属度函数确定指标的广义基本信度赋值。李伟应用模糊评判法对高压断路器系统级进行健康状态评估。D-S证据理论可以更加客观地展现事物所存在的不确定性,且对信息不确定性的度量更具灵活性。熊博杰和周华平利用D-S证据理论消除了煤矿安全评估中的不确定性。
本文作者结合模糊理论与D-S证据理论方法,建立工业机器人整机的评估模型;应用模糊层次分析法处理不确定概念中的模糊性,得到评估指标的隶属度,将它作为D-S证据理论的初始概率分布并修正;利用融合规则融合修正后的概率分布得到最终的评估结果,为工业机器人的检修与维护提供参考。
1 构建工业机器人健康评估指标体系
在建立健康评估指标体系时,既要考虑全面性,又要兼顾不相容性。参照评估指标选取原则和T/FSAS 22—2018《工业机器人健康状态评估》,建立工业机器人健康评估指标体系,如图1所示。

图1 机器人健康评估指标体系
2 工业机器人健康状态评估模型
2.1 各评估指标的相对劣化度
引入相对劣化度对机器人各指标的数量级和量纲进行归一化处理。在工业机器人健康状态评估指标体系中,由于平均负载率、平均运行速度、大气压力和工作空间在其允许的范围内越大越有利于机器人的运行,而手腕扭矩、手腕惯性力矩、环境温度、总功率和重复定位精度在其允许的范围内越小越有利于机器人保持健康状态。则越大越优型指标归一化的表达式为
(1)
式中:为归一化后的数值;为指标的原始数据;为机器人理想值;为机器人指标运行安全时标准值的下限。
越小越优型指标归一化的表达式为

(2)

2.2 模糊判断矩阵的确定
评估体系建立后,需确定各指标的权重。考虑到权重确定方法的特点,选用模糊层次分析法。为使所得判断定量化,参考文献[8-10]采用如表1所示的判断标准定量判断指标间的相对重要程度。

表1 判断矩阵1-9标度法
因素与相比,可得到关于重要程度的比值为
根据表1中的判断标准对各因素的重要程度进行两两比较,结果用式(3)所示的判断矩阵表示:

(3)
式中:(1≤≤;1≤≤)为指标相对于指标的重要程度。
2.3 指标权重的确定
(1)确定单层指标权重
根据公式=和判断矩阵,计算矩阵的特征向量。单层指标权重是特征向量的归一化值。
对每个判断矩阵做一致性检验。当一致性比率=/<0.1时,计算其权重值;若≥0.1,则需重构判断矩阵。其中:为一致性指标,为随机一致性指标,计算公式分别为

(4)

(5)


表2 随机一致性指标RI的数值
(2)确定多层指标综合权重


(6)
2.4 健康评估等级划分
根据《工业机器人健康状况评估》中的标准,将机器人的健康状态分为5个等级,分别用~表示,具体见表3。

表3 健康状态等级划分
2.5 隶属度函数的构造
根据因素集和评语集的定义,因素集表示为={,,,,…,}。因健康状态等级,将评语集记为={,,,,}。因素集到评语集的映射为隶属函数,因此~分别表示对应于健康等级的隶属函数。文中用梯形-三角形隶属函数表示,如图2所示。

图2 三角形-梯形隶属函数
其中:[0,]、[,]、[,]、[,]、[,]分别是~的主值区间。
将标准化后的指标测量值代入隶属函数中可得到其对应于健康等级的隶属度矩阵,表示为

(7)
其中:为指标隶属于评语集中等级的隶属度。应用式(8)将各隶属度等权值综合使不同评估数据权重相等,从而得到一个指标的隶属度,即:

(8)
其中:为第个因素在综合评判中的权重。
根据式(9)按行将矩阵归一化,从而获得指标的广义基本信度赋值(·)为

(9)
2.6 基于D-S证据理论的融合模型
将不同评估指标的信息通过D-S证据理论进行融合,由此获得工业机器人健康状态评估的结果,过程如下:
(1)识别框架的确定。该框架由不确定度和5个健康状态等级组成,即={,,,,,}。
(2)证据的选择和各证据基本概率分配(BPA)的确定。选取能反映工业机器人健康状态且相互独立的指标为证据,通过模糊层次分析法得到的隶属度为D-S证据理论的初始概率分布。在识别框架上计算BPA时应满足以下公式:
(10)
式中:为焦元。
因在融合过程中D-S证据理论将对健康等级具有不同影响的各证据同等对待,且可能存在高冲突的多个证据同时参与评估,所以需在融合前对初始概率分布值进行修正。本文作者应用可信度系数衡量证据是否可信。用修正融合前的初始BPA:

(11)

根据不同评估指标之间权重计算,即:
=max
(12)
其中:max是第一层指标下一层单个指标的最大权重;是优先可信度系数,文中取0.9。
(3)证据融合。应用Yager融合规则对证据进行融合,具体的融合规则如下:

(13)
(14)
式中:()是融合后的BPA;、是识别框架的子集;是归一化常数。
(4)确定评估规则。现有的评估规则有很多,而最大信任规则和人类的认知是一致的。因此,利用最大信任准则判断机器人的健康状态,确定的健康等级即为机器人健康评估的结果。
2.7 工业机器人健康状态评估流程
文中采用的基于模糊理论与D-S证据理论结合方法的工业机器人健康状态评估流程如图3所示。首先,采用式(1)和式(2)分别求出机器人健康状态评估指标体系中各指标的相对劣化度;其次,将相对劣化度代入所建立的隶属函数中,对各指标进行模糊分析从而获得指标的隶属度;最后,将各隶属度当作初始BPA,对其采用D-S融合规则融合,得到的评估结果为机器人相应的健康状态。
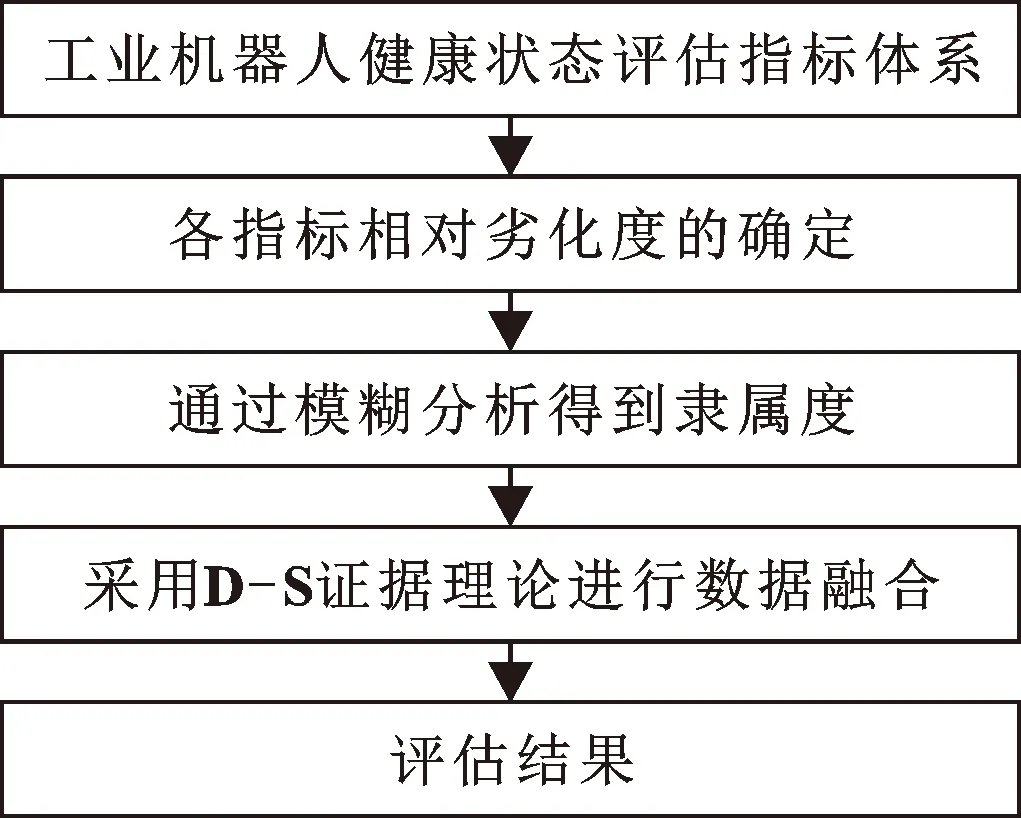
图3 工业机器人健康状态评估流程
3 实例分析
以实验室的某台埃夫特ER20D-C10型工业机器人为例,其模型如图4所示。该工业机器人状态信息数据见表4。
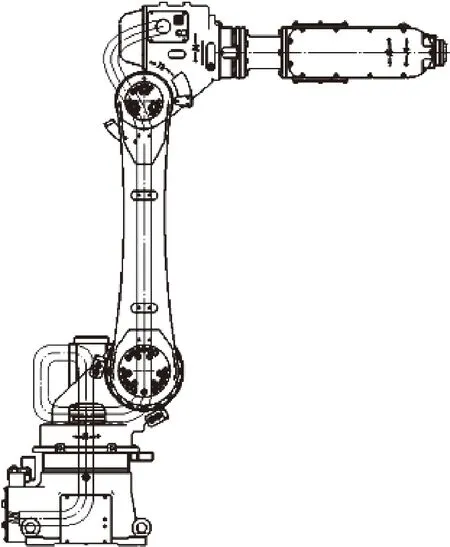
图4 埃夫特ER20D-C10型工业机器人
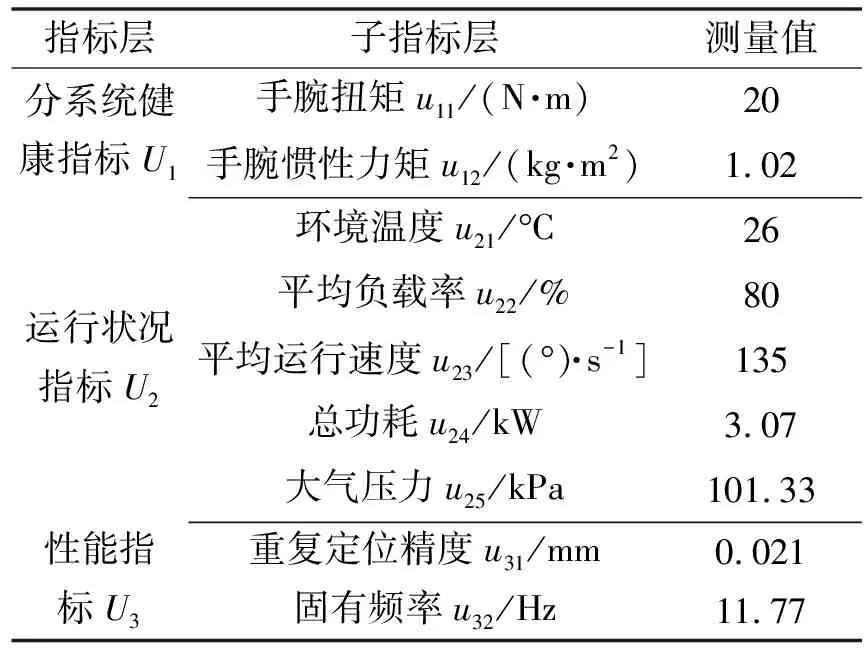
表4 ER20D-C10工业机器人状态量信息数据
由工业机器人指标的极限值,可计算各指标的相对劣化度为:=[0,0.14],=[0,0,0.18,0.12,0],=[0.15,0]。
通过模糊分析法计算5种健康状态等级下各指标的隶属度,并将得到的隶属度作为各指标初始的BPA,如表5所示。

表5 各指标初始的BPA
利用MATLAB编程,使用模糊层次分析法计算各层指标的权重,并通过式(12)计算各自的可信度系数,如表6所示。

表6 指标权重及可信度系数
利用式(13)(14)对未修正的初始概率分布进行融合,得到机器人健康状态的BPA为=[0.734,0.086,0,0,0,0.180],使用最大信任规则可判断出机器人处于完好状态。利用式(11)对初始概率分布进行修正,进而得到修正后的概率分布;对指标层单项状态量各指标的概率分布应用Yager融合规则按式(13)(14)进行融合,得到机器人指标层单项状态量的初始概率分布为
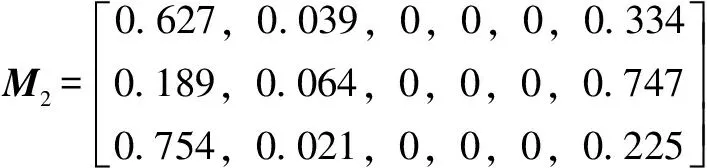
再对指标层各单项状态量的初始概率分布应用融合规则进行融合,即可得到工业机器人最终的BPA为=[0.614,0.002,0,0,0,0.384],使用最大信任规则可判断出机器人处于完好状态,因此可以认为此工业机器人处于完好状态。
由于鲜少有人研究工业机器人整机的健康评估,而联合收割机与工业机器人组成相似,所以用文中方法研究文献[25]中联合收割机整机的状态评估,得到的评估结果为=[0.142 3,0.403 1,0.138 4,0.032,0,0.284 2]。采用最大信任规则可以判断出该联合收割机的性能属性为好,与文献[25]得到的结论相同。通过比较,评估结果与实际情况基本一致,验证了该健康评估方法的正确性。
4 结论
(1)本文作者采用一种基于模糊理论和D-S证据理论的方法处理工业机器人健康评估中遇到的各评估状态量存在不确定性和模糊性的问题。利用模糊层次分析法处理不确定概念中的模糊性问题,得到评估指标的隶属度,将它作为D-S证据理论的初始概率分布并修正,再将修正后的概率分布应用D-S融合规则融合,从而得到机器人的健康评估结果。
(2)通过实例验证了该健康评估方法的正确性,且评估结果也符合实际情况。由此验证了模糊理论与D-S证据理论的结合可以很好地评估出工业机器人的健康状态,从而为机器人的状态检测和故障诊断提供参考。由于文中所选的机器人健康状态指标不能涵盖所有指标,影响最终机器人健康评估的结果,所以接下来将继续围绕完善工业机器人健康评估指标进行工作。
