基于TRIZ理论的螺丝刀创新设计
2022-09-16杨晨张秀芬张树有张利春
杨晨,张秀芬,,,张树有,张利春
(1.内蒙古工业大学机械工程学院,内蒙古呼和浩特 010051;2.浙江大学流体动力及机电系统国家重点实验室,浙江杭州 310027;3.康力电梯股份有限公司,江苏苏州 215213)
0 前言
拆卸是实现退役机电产品有效回收再利用的关键步骤,利用自动化拆卸设备可以提升拆卸效率。其中,螺纹紧固件在机电产品中占比很大,其快速拆卸已受到广泛关注。螺纹紧固件的拆卸工具一般有外六角扳手、内六角扳手、十字螺丝刀以及一字螺丝刀等。不同的螺纹联接形式一般要采用不同的拆卸工具进行拆卸。例如,十字槽和一字槽的螺钉分别选用十字和一字的螺丝刀进行拆卸。在自动化拆卸过程中,需要在拆卸前先判断待拆卸螺钉的开槽形状,以选择合适的螺丝刀进行拆卸。拆卸过程繁琐、工具更换频繁,影响自动化拆卸效率。
已有学者针对螺丝刀的设计开展了系列研究。朱虹斐设计了一种全尺寸螺丝刀,将柔性密封层和调节粉末配合作用代替原有的金属刀头,并且在刀杆内安装了一个控制器来控制活塞以抽空调节粉末间的空气,实现真空。调节粉末可形成所需要的螺丝刀的形状。该设计满足了不同螺丝刀类型的需求,但是控制繁琐、密封要求高,存在制造困难和成本高等缺陷。徐梓涵等采用嵌套的方式,将不同尺寸、类型相同的螺丝刀组合在一起,通过外部的按压力切换不同尺寸的螺丝刀,但是无法拆卸不同开槽形状的螺钉,如果待拆卸螺钉位于深孔内,嵌套的冗杂外部结构会使拆卸无法实现,并且嵌套的螺丝刀层数越多,制造和安装就会变得越困难。
TRIZ理论在产品创新设计中具有显著的优势,已成功应用到了往复式线切割机床储丝筒创新设计、鼠标再制造拆卸装置设计、行李箱创新设计以及抛挂装置优化设计等。
由于传统的螺丝刀刀头花纹形状不同,在拆卸不同的螺钉时需要不同型号的螺丝刀,尤其在自动化拆卸中需频繁更换螺丝刀,增加了拆卸时间,降低了拆卸效率。为此,本文作者应用TRIZ理论中的分离原理以及物-场模型,解决需要提前识别螺钉开槽形状和更换螺丝刀的矛盾,设计一种适合于自动化拆卸设备的螺丝刀。
1 存在问题
目前,因螺钉开槽形状不同,需使用不同花纹的螺丝刀进行拆卸。在机电产品的螺钉拆卸过程中,十字或一字螺钉并存于任何拆卸时间线内。例如,对图1所示的时间线1,需要的螺钉拆卸工具依次是十字螺丝刀、一字螺丝刀、十字螺丝刀......一字螺丝刀、一字螺丝刀等,但对单一的螺钉而言,拆卸的工具只需要十字螺丝刀或者一字螺丝刀。
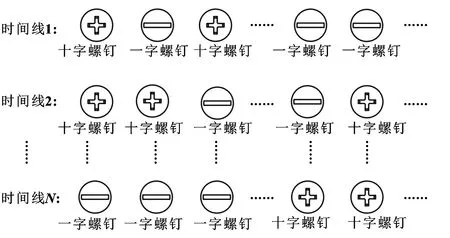
图1 螺钉拆卸时间线
螺钉的拆卸是依靠刀头花纹的形状和螺钉槽的形状进行嵌合,通过外部沿刀杆轴向的力和扭矩共同作用完成。力是为了抵消在扭矩的作用下产生的垂直于刀杆轴线的分力,避免螺丝刀和螺钉分离,一般不大,可忽略不计;扭矩是依靠刀头面和螺钉槽面的挤压施压,以保证刀头面和螺钉槽面一直有良好的接触,具体如图2所示。由于十字螺钉和一字螺钉的受力形式相同,文中仅给出一字螺钉受力的局部放大图。
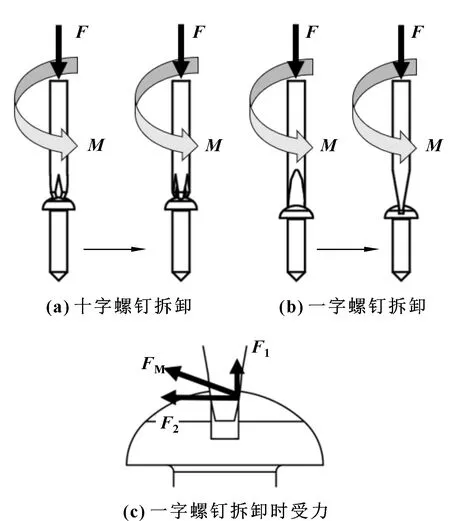
图2 十字和一字螺钉拆卸方式以及受力方式
新型螺丝刀是一种可以拆卸十字或者一字螺钉的工具。对同一螺丝刀在不同的工作情况下,提出了需要面对不同螺钉开槽形状而改变花纹的要求。根据TRIZ理论和已有螺丝刀的结构特征,上述新型螺丝刀的设计以及现有的设计存在着物理矛盾,即同一系统同一参数内的矛盾。
2 基于物理矛盾的新型螺丝刀设计
新型螺丝刀应具备使螺丝刀的花纹在面对不同开槽形状的螺钉时自动匹配,实现一种工具可同时拆卸十字和一字螺钉的功能。
由于矛盾双方在拆卸一个螺钉的这个时间段内只会出现一方,这符合时间分离的要求,所以采用时间分离原理解决该物理矛盾。在时间分离原理中,有12个发明原理可以解决与时间分离有关的物理矛盾,经过分析比较,采用发明原理15——动态化原理。动态化原理包含3个含义:(1)通过调整物体或外部环境的特性,使它在各个工作阶段都能呈现出最佳的特征;(2)将物体分成互相可以相对移动的几部分;(3)将物体原来不动的部分变成可以动的,增加其运动性或柔性。
具体设计步骤如下:
(1)将原来无法运动的螺丝刀刀杆工作部分,即刀头,从原来的刀杆中分离出来,使它可动;
(2)按照和不同螺钉相嵌合的要求,把分离出来的刀头部分按照十字和一字花纹的拆卸需求分离成几个部分;
(3)把分离出来的新十字刀杆和新一字刀杆嵌套于开槽刀杆,新十字刀杆和新一字刀杆可以在新刀杆内部沿轴向自由移动,使其面对不同的拆卸需求时,都能够呈现出最佳特征。
得到的新型螺丝刀设计初始方案如图3所示。图3(a)为分离状态,这些分离出来的新刀杆就是十字和一字螺丝刀的不同特征。在新一字刀杆和新十字刀杆顶端处保留有凸台的设计以防止它们从新刀杆内滑落。配合方式如图3(b)所示。根据新一字刀杆或者新十字刀杆的相互配合作用,可以实现不同螺丝刀的形状,如图3(c)、3(d)所示。
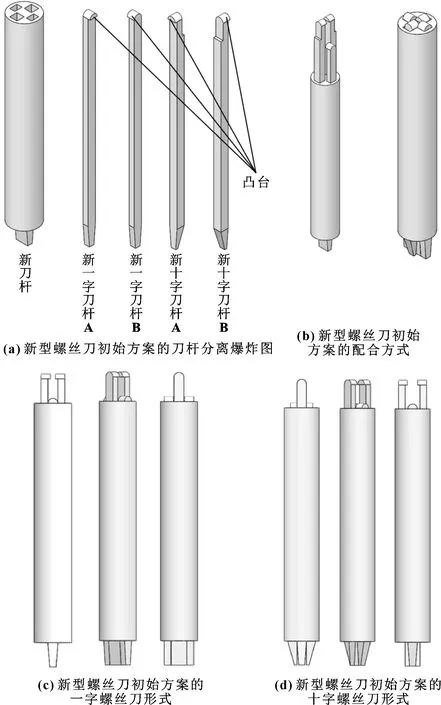
图3 新型螺丝刀设计初始方案
上述设计可以让螺丝刀匹配不同开槽形状的螺钉,但是仍然没有解决如何实现螺丝刀自动根据待拆卸螺钉的形状做出改变这一矛盾。
3 基于物-场模型的新型螺丝刀优化
物-场模型适用于解决关键子系统中的矛盾问题,常见的物-场模型如表1所示。其中,有害效应的完整模型需要消除;不完整模型、效应不足的完整模型需要重点解决。在分析出当前模型属于以上3种需要解决的非正常模型中的哪一个问题模型后,再使用TRIZ理论给出的解决方法完善这个模型。
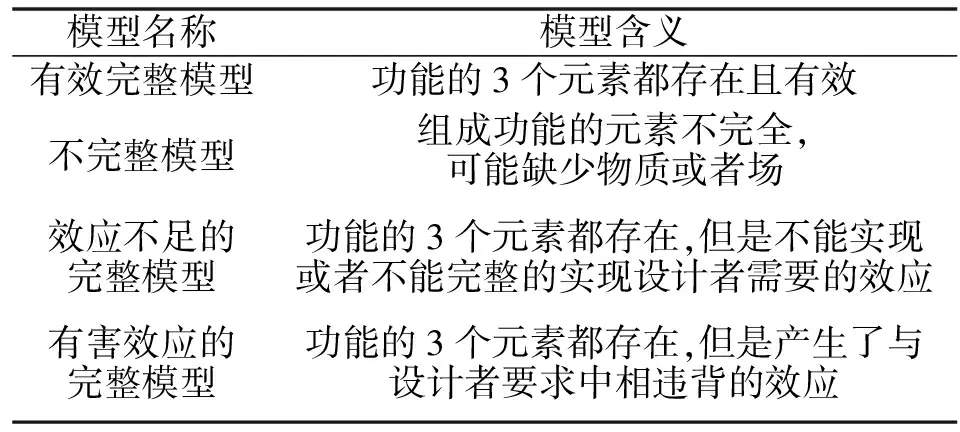
表1 常见的物-场模型
对上述设计的新型螺丝刀进行物-场模型分析,结果如图4所示。由于新一字刀杆和新十字刀杆具备了运动性,它们在新刀杆内沿轴向具有较高的灵活性,导致新的螺丝刀无法像原来一样只依靠外部给予一个沿刀杆轴向的力和一个扭矩就能够工作,而是缺少一个新的场使螺丝刀完成螺钉拆卸任务。因此,这是一个不完整模型,缺少一个场。
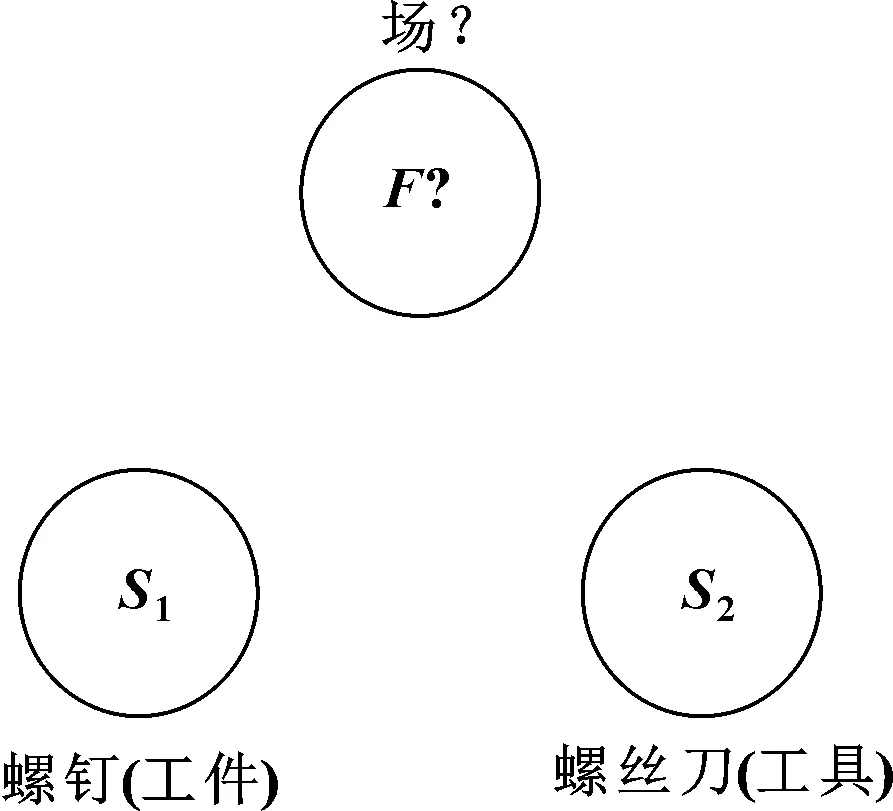
图4 新型螺丝刀初始方案的物-场模型
对于3种非正常模型,TRIZ理论给出了6种一般解法和76种标准解法。实际应用中,常采用6种一般解法来处理不完整模型、效应不足的完整模型以及有害效应的完整模型。本文作者采用一般解法1中的补齐所缺失的元素、增加场或工具以及系统地研究各种能量场这3种解决方式。由于图4的模型中缺少场,需要加入一个合适的场来完善这个不完整的物-场模型,并且尽量使加入的这个场为物-场模型完善的最优解。
扭矩是由新一字刀杆和新十字刀杆与新刀杆空槽之间挤压产生的,新增的场只要能够传递沿刀杆轴向的力,就可以使新型螺丝刀完成拆卸任务。
当新一字刀杆和新十字刀杆收回到新刀杆内部时,会分别占据原有的新刀杆内部的空间。因此,以这个新刀杆内部的完整空间为研究对象,假设这个完整空间内部用来收纳新一字刀杆或新十字刀杆收回部分的空间是有限的,且占据的空间大小相同,只是当新一字刀杆或新十字刀杆分别收回时,这部分空间在原有的完整空间内部改变了位置。以往的刚性物质不具备这种灵活性,所以采用柔性物质去占据这部分空间,并且留有一部分剩余空间,使这部分剩余空间的大小仅能容纳新一字刀杆或新十字刀杆收回的部分,不能同时容纳它们共同收回的部分。这个柔性物质可以采用液体胶囊,液体具有不可压缩的性质。这样就可以使每拆卸一种螺钉时,只有新一字刀杆或新十字刀杆中的一种在工作,以保证螺丝刀拆卸不同花纹的螺钉都可以工作。同时,由于收回的新一字刀杆或新十字刀杆部分占据了原来新刀杆内部的剩余空间,导致这个被填充满的空间可以给正在工作的新一字刀杆或新十字刀杆一个沿刀杆轴向的力,使螺丝刀可以完成拆卸任务。完善后的物-场模型如图5所示。
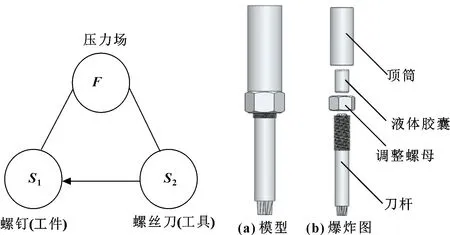
图5 新型螺丝刀的物-场模型 图6 设计得到的自动化拆卸螺丝刀
优化后的新型螺丝刀如图6所示。将液体胶囊放置在顶筒内,通过螺纹配合安装在刀杆上方。顶筒内为空腔结构,可以通过螺纹配合和调整螺母来改变顶筒内剩余空间的大小。
其工作过程如下:
假设当前拆卸任务同时包含十字槽和一字槽螺钉且它们轮替存在,先拆卸十字螺钉:螺丝刀沿着平面移动到合适的定位位置下降,刀头与螺钉帽相接触;随着沿刀杆轴向力的作用,刀头继续下降,螺钉帽未开槽的部分会对螺丝刀的新一字刀杆产生压力,迫使它收回新刀杆中。收回刀杆内部的新一字刀杆部分占据了原来在新刀杆中的剩余空间,由于液体胶囊的存在,空间不可被压缩,新十字刀杆无法收回,并且嵌入在了螺钉帽开槽的部分,此时,十字螺丝刀形成。一字螺丝刀的工作方式和十字螺丝刀一致,二者可以随时交替进行工作,以满足不同的拆卸需求。
4 结论
为克服同一类型传统螺丝刀无法对一字和十字螺钉共同拆卸的不足,基于TRIZ理论设计了一种新型螺丝刀,具体结论如下:
(1)通过分析已有螺丝刀拆卸原理和结构特征,基于时间分离原理,设计了一款新型螺丝刀,并对它进行物-场分析。通过加入液体胶囊对该设计进行了优化,实现了十字和一字螺丝刀互锁的功能。基于TRIZ的螺丝刀设计可为同类产品的设计提供参考。
(2)所设计的自动化拆卸螺丝刀结构简单、制造成本低、通用性强,可以广泛地应用于自动化拆卸中,从而节省拆卸时间,提升拆卸效率。
