负负载工况下打捆机举升机构的机液联合仿真
2022-09-16李文豪包家汉王智冲宗艺墨
李文豪,包家汉,王智冲,宗艺墨
(1.液压振动与控制教育部工程研究中心,安徽马鞍山 243032;2.安徽工业大学机械工程学院,安徽马鞍山 243032)
0 前言
高速线材打捆机是精整生产工序中的关键设备,其作用是将处于散卷状态的线材盘卷牢固地捆绑起来,以便于存储和运输。打捆机举升装置采用液压缸驱动平行四边形机构,托起盘卷,使线卷到达指定高度,进行打捆动作。
对于打捆机举升机构,以往的研究对其升起过程进行了运动学和动力学分析,从而得出举升机构的运动趋势和受力趋势,但举升机构是集机、电、液于一体的复杂系统,利用常规的简化解析方法或者传统的机械动力学分析软件无法获得系统的实际动态参数,需进行机械与液压系统联合仿真。同时,举升机构的液压缸回程是在重力和液压缸推力共同作用下完成的,如果设计的液压系统不能平衡负负载,则会由于返回速度加快,造成返回时驱动力大于驱动阶段驱动力,甚至超过所提供的最大驱动力。对于联合仿真方法的选择,大多数学者更倾向于多软件之间的协同仿真,该方法虽能很好地模拟真实负载,反映机液系统的动态性能,但是协同仿真接口难以创建,安装软件较多,占用系统资源较大,同时调用软件耗时长。
为验证设计的液压系统能否很好地平衡液压缸回程时产生的负负载,同时验证设计后的液压缸驱动力是否满足要求,本文作者以某高速线材打捆机举升机构为研究对象,在考虑负负载情况下,利用MATLAB/Simscape工具箱中的Multibody和Fluids模块,在统一的环境中完成举升机构的机液联合仿真,从而进一步研究液压系统对机械系统运动的控制。并与单独举升机构的机械系统动力学仿真结果对比,得出与动力学仿真相比,基于Simscape的机液联合仿真充分考虑了液压系统对机械系统运动的调节和控制作用,可很好地模拟液压缸回程时对负负载的平衡,且液压缸的驱动力满足设计要求。
1 联合仿真工具简介
Simscape作为MATLAB的扩展模块,可在Simulink环境下创建物理模型的工具和语言,Simscape扩展了Simulink的应用范围,实现了对多交叉物理建模系统的建模与仿真,通过Simscape,可以基于物理连接直接连接模块框图建立物理组件模型。Simscape由Simscape Electrical、Simscape Fluids、Simscape Multibody等模块组成,集成了机械、液压等多学科物理功能组件,提供了物理场模型与信号场之间的接口模块,可以将机械系统、液压系统、电气系统等集成到模型中,实现系统的联合仿真。本文作者利用它对机械系统和液压系统进行建模,然后通过接口模块实现数据的交互,完成联合仿真模型的创建。
2 举升机构机械系统建模
如图1所示,打捆机举升机构的主要部件包括底座、液压缸、主动曲柄、从动曲柄、连杆、支撑辊、C形挂钩、高线盘卷等,通过液压缸的伸缩来改变举升的高度。图1所示为托举盘卷到达最高位时的状态。
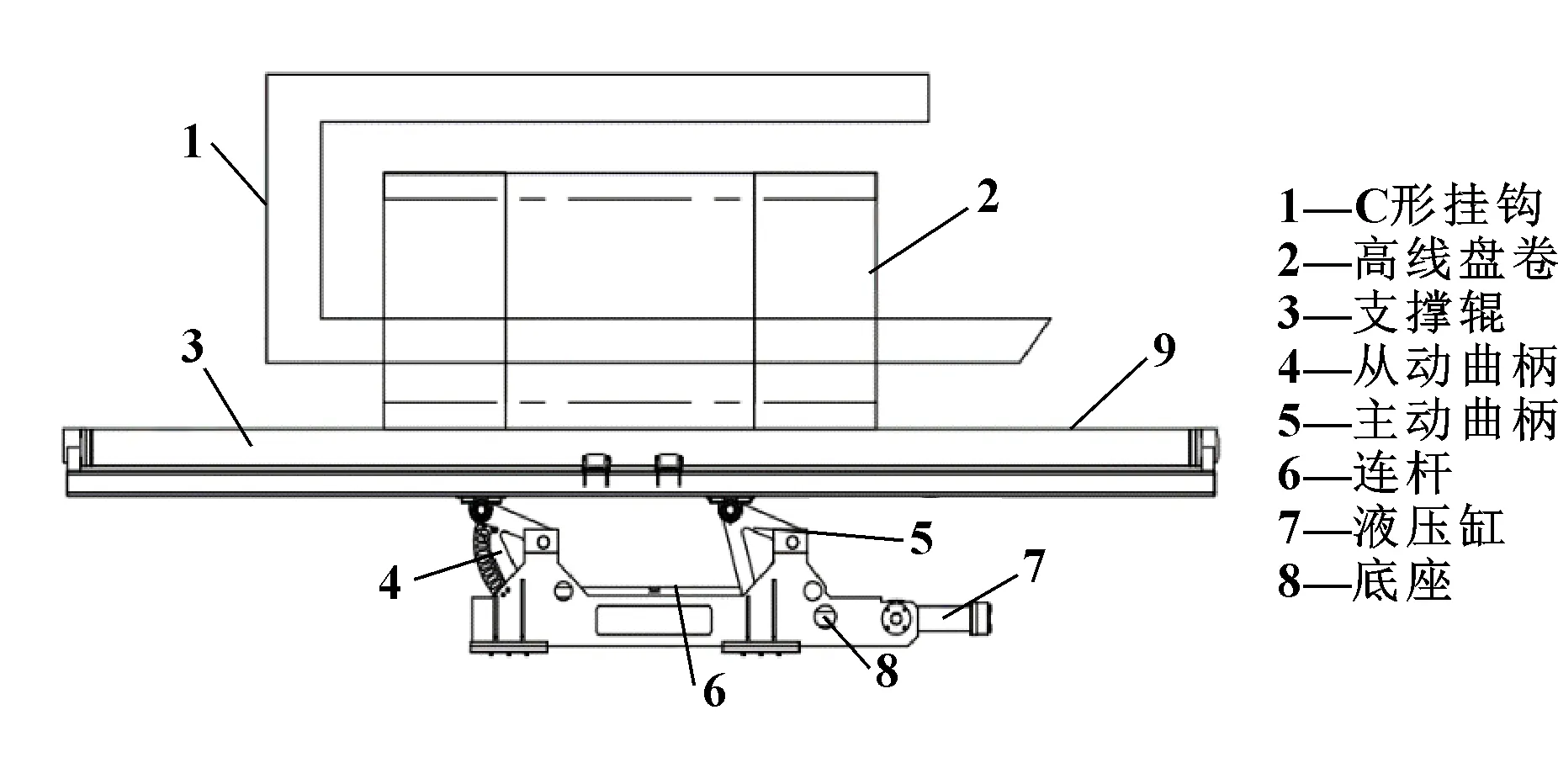
图1 打捆机举升机构示意
由于举升机构结构比较复杂,同时,在升降台底座装配的上部的托辊上还有高线盘卷。为简化计算,取消盘卷和托辊的模型,将其总质量(3 200 kg,其中托辊质量1 000 kg、盘卷质量2 200 kg)添加到支撑辊轴承上,从而满足负载的要求。在Simscape工具箱中的Multibody模块集里建模和装配比较麻烦,所以在SolidWorks中建立举升机构的模型,通过SolidWorks的Simscape Multibody插件导出成xml格式的模型文件。在MATLAB中,通过Simscape Multibody模块将导入的xml文件生成图像化的刚体结构关系图,如图2所示,然后对其自动生成的关节坐标进行适当修改,使其运动关节位于运动的中心节点上。设置其他零件材料为钢,密度为7.8×10kg/m,重力加速度为9 806.65 mm/s。
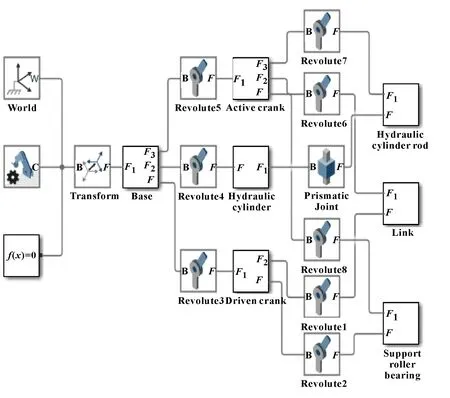
图2 举升机构刚体结构关系
3 举升机构液压系统建模
3.1 三位四通电磁换向阀子系统
由于Simscape Fluids工具包中的换向阀没有Y形的中位机能,因此采用6个可变节流阀和1个三位阀执行器进行搭建,其结构如图3所示。将不同初始开口和阀口方向的可变节流阀进行组合,以实现所需的中位机能;三位阀执行器通过调节可变节流阀的开口实现换向控制和流量控制。
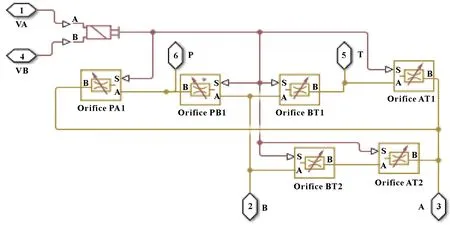
图3 三位四通电磁换向阀子系统
3.2 举升机构液压系统原理
根据举升机构的动作要求,三位四通电磁换向阀控制液压缸的伸缩(图4),在液压缸的进出油口增加单向节流阀,通过改变阀口开度来控制油液的流量。单向节流阀通过控制流量调节液压系统运行速度或者形成一定背压,使系统稳定运行,且在液压缸回程时能够调节流量控制系统运行速度,平衡负负载。由双液控单向阀和电磁换向阀组成的锁紧回路,在中位时不给液控单向阀提供控制油,使得双液控单向阀可靠地锁紧。
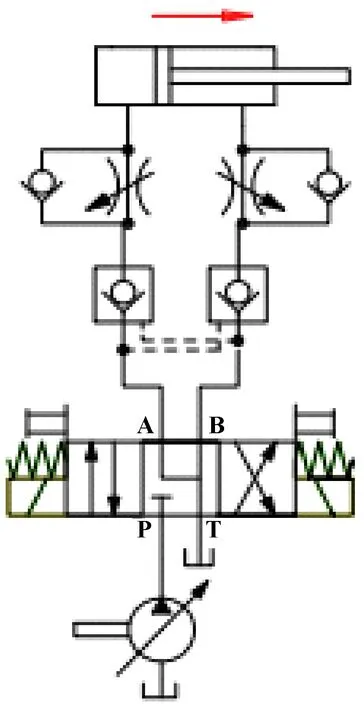
图4 举升机构液压系统原理
3.3 液压系统模型的建立
Simscape工具箱中的Fluids模块提供用于建模和模拟液压系统的组件库。图5所示为依据液压系统原理,在Simscape中建立的举升机构液压系统模型。
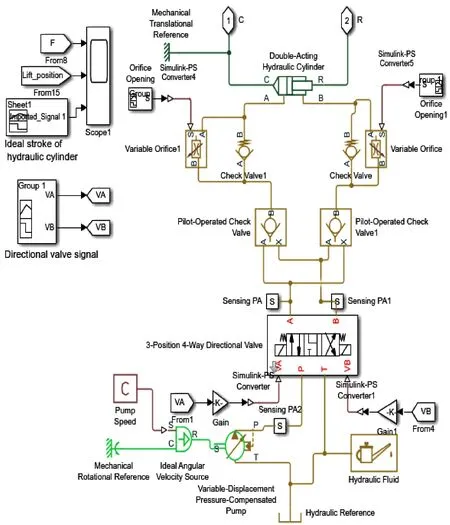
图5 举升机构液压系统模型
在Simscape中完成举升机构液压系统模型的搭建后,根据液压原理图明细表中标注的某品牌液压元件型号,确定各参数的数值,完成参数设置。
4 举升机构动力学仿真模型建立
使用Simscape Multibody工具箱对举升机构进行动力学仿真,只需要在生成的刚体结构关系图的基础上,添加力、力矩和运动输入来驱动模型,并使用传感器测量其动态响应。使用模型中的连接块来驱动这些关节,建立它们的内部力学模型,并感知特定关节的动态变量。图6中给定了移动关节块所需的运动输入信号,然后通过移动关节中的位移和速度传感器端口测量其系统响应。设置举升液压缸在初始2 s内的行程为180 mm,停3 s后再在2 s内运动180 mm,驱动速度均为85 mm/s;在第28 s(停止了21 s)后再在2 s内返回360 mm的行程。为节省时间在举升阶段按前面的描述,在第9 s开始返回,第11 s运动结束。
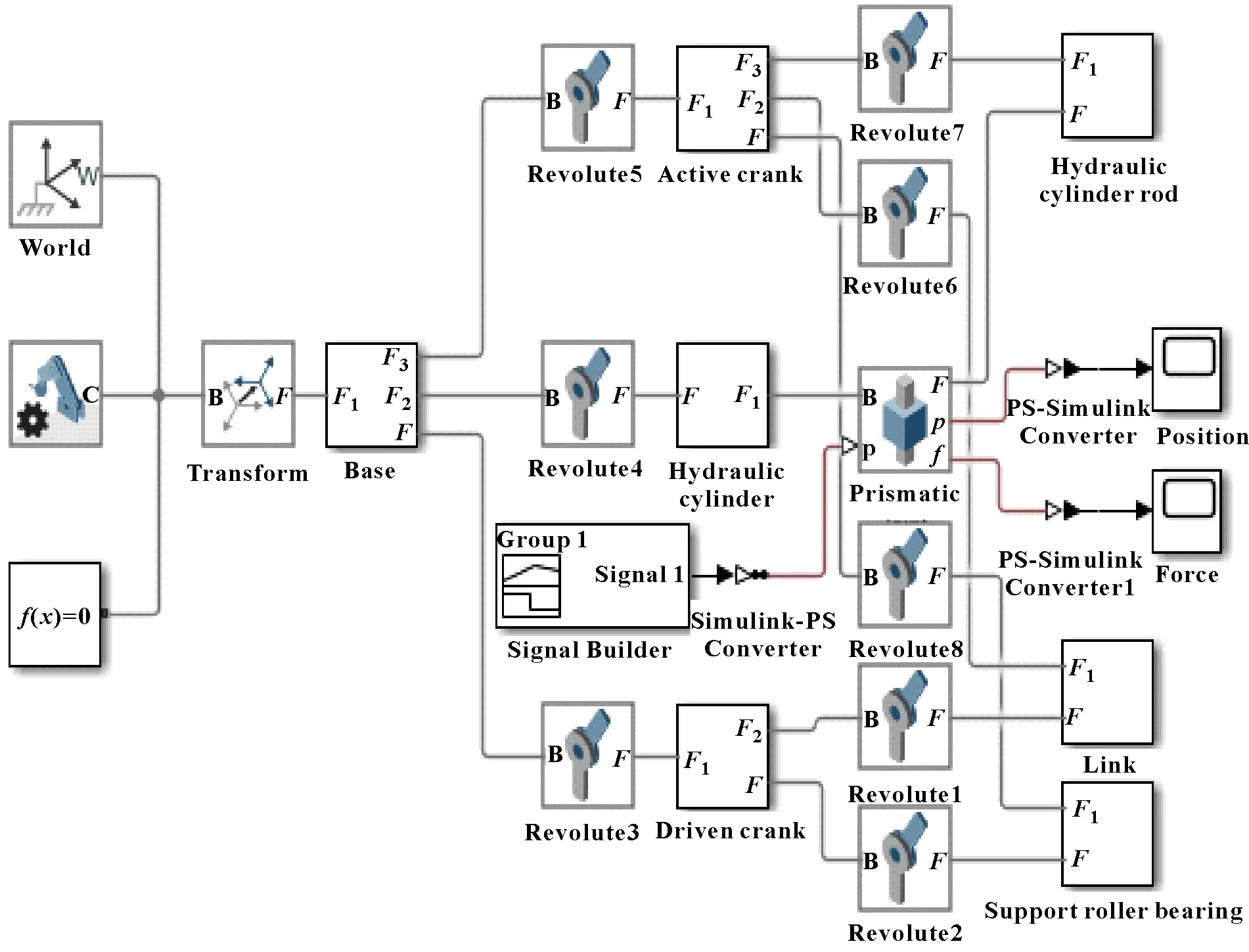
图6 举升机构动力学仿真模型
5 联合仿真模型建立
5.1 联合仿真转换模块的建立
在进行机液联合仿真的过程中,机械模块和液压模块之间的转换需要转换模块。转换模块是基于液压库里的基础元件搭接的,如图7所示。利用Prismatic Translational Interface 模块,将打捆机举升机构中驱动液压缸的流体压力能转化为机械系统中移动副的机械能,从而将液压和机械2个子系统连接成1个统一的多域物理仿真系统,最后只需对其创建子系统即可。
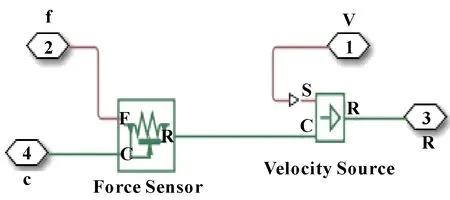
图7 联合仿真转换模块
5.2 机液联合仿真模型的建立
与动力学仿真模型的处理相似,在联合仿真的机械系统模型中需要对移动副进行设置,添加力来驱动模型,然后通过位移和力传感器测量其动态响应。输出的速度传递给液压系统,最后由液压系统计算得到力反馈给机械系统。
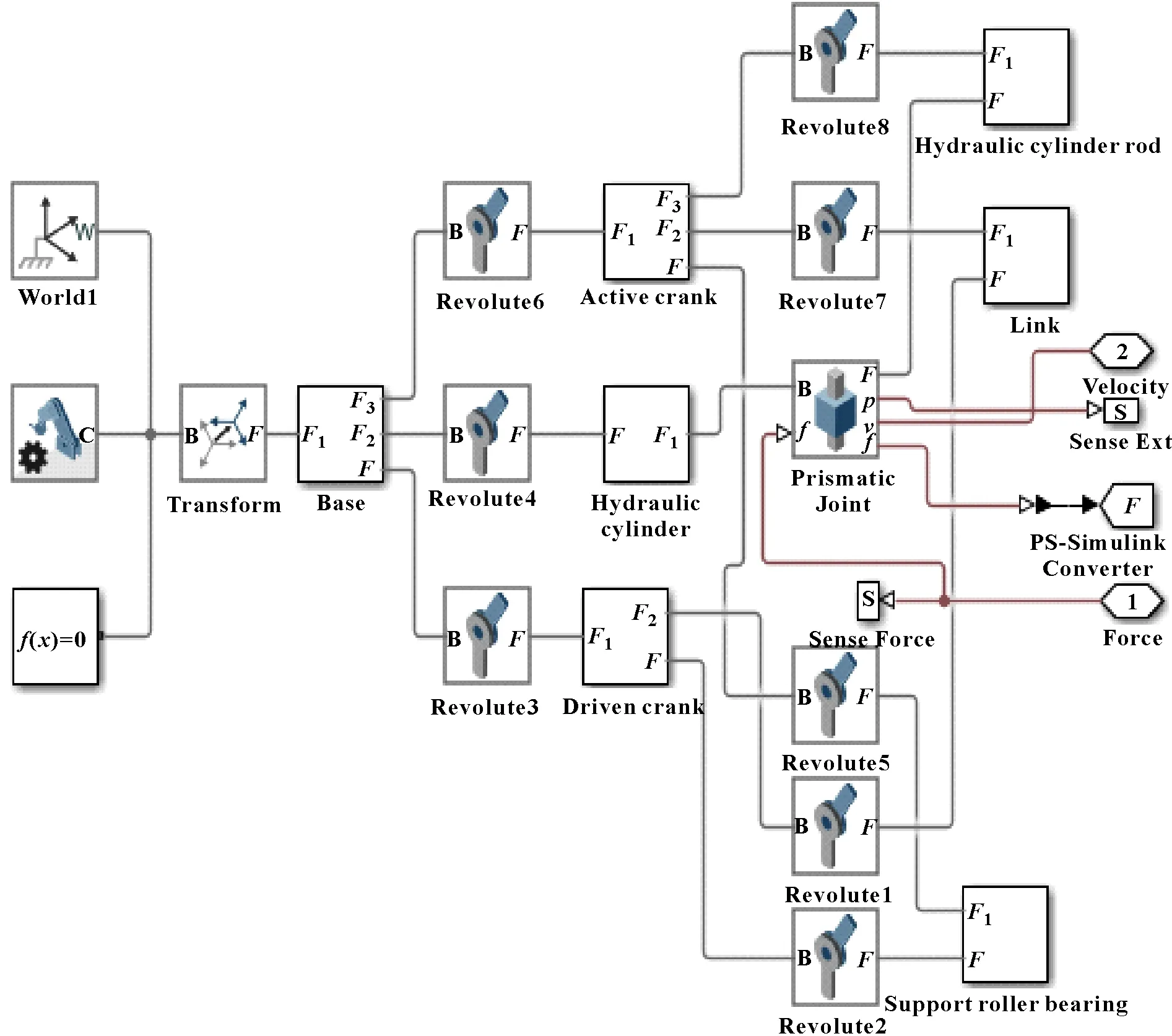
图8 联合仿真机械系统模型
在机械系统和液压系统模型建成后,对它们进行封装,最终的模型框架(见图9)由机械系统模块、转换模块和液压系统模块组成,直观地反映了模型之间变量的交换。图10所示为打捆机举升机构虚拟样机。
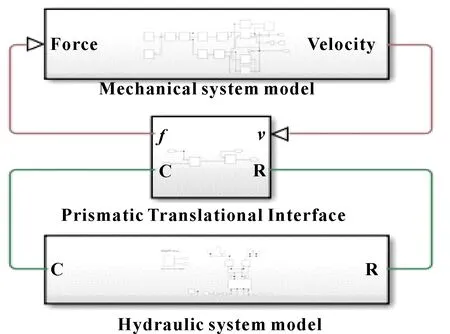
图9 基于Simscape的举升机构机液联合仿真模型
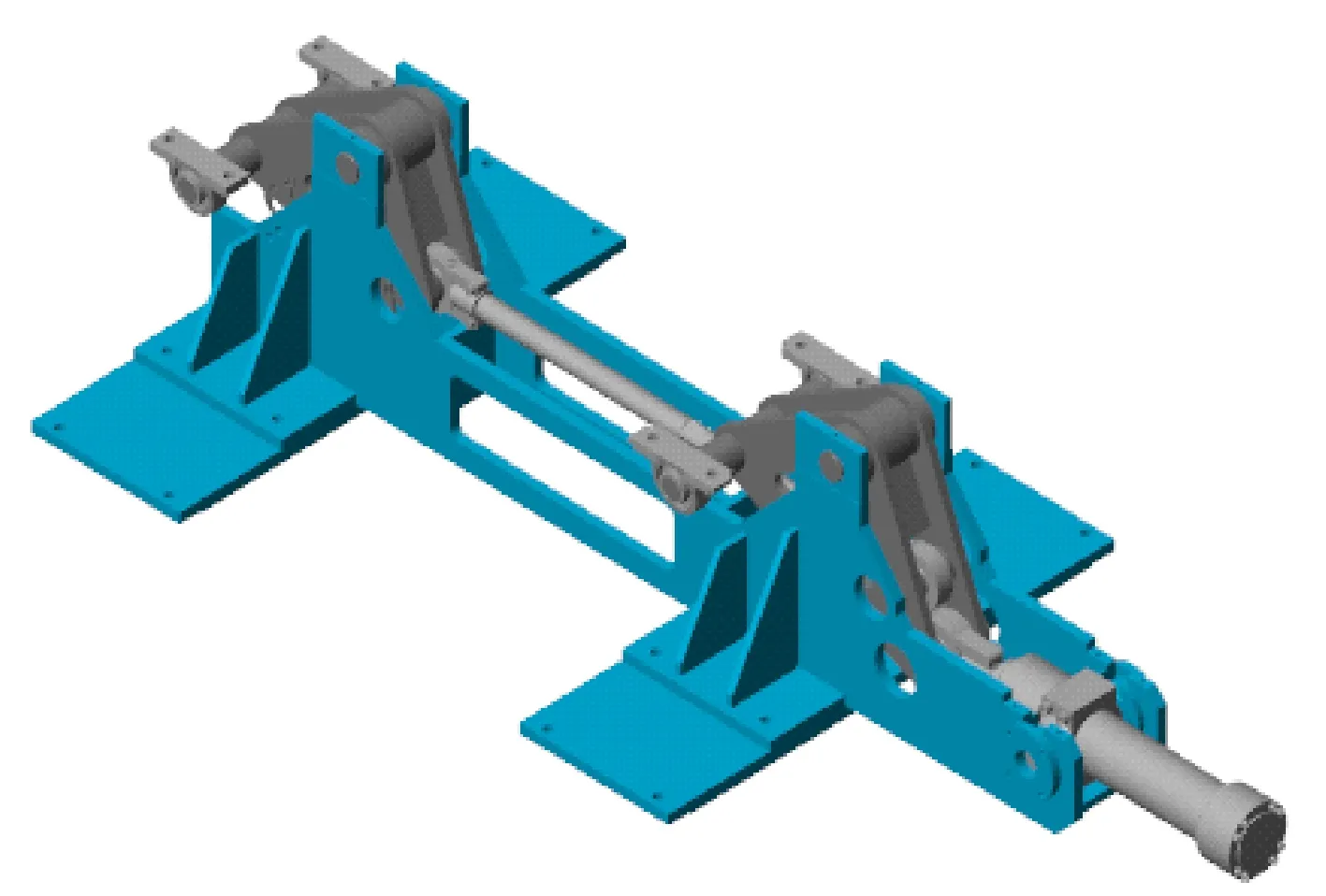
图10 打捆机举升机构虚拟样机
5.3 仿真结果与分析
图11所示为举升机构动力学仿真和机液联合仿真液压缸的实际位移对比。可知:2条曲线基本吻合,在C形吊钩将线圈运送到圆柱导轨上后,为0~2 s内运动位移为180 mm,停3 s后,在为5~7 s内运动位移为180 mm,再停2 s后,在为9~11 s内返回360 mm的行程,与设定的运动路径一致。
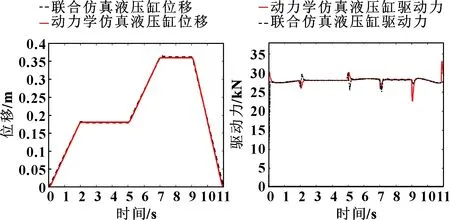
图11 液压缸运动行程对比 图12 液压缸驱动力对比
图12所示为举升机构动力学仿真和机液联合仿真液压缸驱动力对比。可知:动力学仿真驱动力在液压缸启动时刻驱动力直接达到2.9×10N;联合仿真驱动力由于有液压系统的控制作用,驱动力存在一个变化过程,在为3~5 s液压缸停止时,驱动力为2.802×10N,为托辊等重力(质量3.2×10kg)的87.5%,在整个驱动过程中,最大驱动力为3.01×10N,而CDM1MT4-100/70-400的液压缸能提供的最大推力为12.56×10N,超过了所需的最大驱动力3.01×10N(实际压差只需5.35 MPa),因此液压缸驱动力足够,能够满足使用需求。在液压缸回程时,由于动力学仿真中未考虑到负负载工况的影响,同时受到重力和液压缸推力的共同作用,造成返回时驱动力大于驱动阶段驱动力,但由于机液联合仿真实现了机械和液压系统间的耦合作用,可通过液压元件的调节作用平衡负负载,为系统的正常运行提供了保障。通过驱动力的对比,验证了机液联合仿真对于负负载工况的模拟是有效的、真实的。
6 结论
本文作者基于一种新型打捆机举升机构的设计,根据其系统结构的工作原理,运用MATLAB/Simscape工具箱成功实现了打捆机举升机构的动力学仿真和机液联合仿真。通过仿真结果的对比,得出以下结论:
(1)在举升机构的整个驱动过程中,尤其是在液压缸回程时,在考虑负负载情况下,液压缸能提供的最大推力远超所需的最大驱动力,液压缸驱动力足够,能够满足使用需求;
(2)基于Simscape的机液联合仿真技术可以更加精确地对打捆机举升机构的机械-液压系统进行仿真分析,真实地模拟出机构的运动情况,验证了该液压系统的设计对平衡负负载是有效的。联合仿真分析可以为打捆机举升机构的研发设计和改进提供参考。
