箱柜车箱式货物自动装卸机器人设计
2022-09-15顾绮芳
顾绮芳
(无锡城市职业技术学院,江苏 无锡 214000)
0 引言
装卸机器人作为工业机器人的一个重要分支,有着广泛的市场需求前景,随着现代仓储物流业的快速发展,机器人在货物搬运、分拣等作业环节得到广泛应用,但在货物装卸自动化流程前端仍缺少自动化装卸设备。目前,一些工业发达国家已经研发出该类自动化装卸设备,并在港口和仓储的装卸、物料搬运等方面开始应用,包括叉车桁架式装卸机器人、悬臂式装卸机器人、多节装卸机器人等[1]。这些装卸机器人大多体积较大且只针对开放式空间内的货物装卸,对于封闭空间内的货物装卸并不适用,如港口集装箱作为货物运输存储的主要手段,主要还是靠叉车、输送皮带机配备人工作业来实现货箱装卸。基于市场需求,本文研究了一种箱柜车箱式货物自动装卸机器人以满足封闭空间内的货物装卸要求,提高了物流储运效率,降低人工成本,解决物流末端装卸货无法取代人工这一“卡脖子”难题[2]。
1 研究背景和意义
现代物流业发展迅速,已成为国民经济的支柱产业。随着科学技术的发展,现代物流系统和装备自动化程度不断提高,有效提高了物流系统的储运效率,但在仓储物流中的箱式货物—货箱装卸环节的作业自动化程度仍不高,特别是大批量仓储物流配送中的货箱还多为人工装卸,既降低了物流环节的效率,又增加了人力成本,还造成整个仓储物流自动化流程中出现作业不连续的环节。因此,研发仓储物流中货箱的自动化、智能化装卸技术和装备具有广泛的应用前景,对加快现代仓储物流自动化程度的提高具有重要意义[3]。
近来,国外已成功研发并投入使用货箱装卸的自动化、智能化装备,核心技术主要是机器人、自动化控制、机器视觉与智能识别等,主要针对集装箱、箱式货车及货仓进行高效无人化装卸作业,可用于小家电、食品、烟酒、乳制品等箱装货物。目前,国内还没有研发和使用该类自动化、智能化装卸设备,由于国内现代化仓储物流配送产业发展迅猛,该类装备研发成功将有广泛的市场需求,能填补国内在该领域的技术和产品空白。
2 箱式货物自动装卸机器人结构设计
箱式自动装卸机器人结构如图1所示共由4部分组成,分别是转运车、随动输送机构、大臂机构和小臂机构。小臂机构包括小臂侧板、抓手导向板、输送带安装板、后输送带机构、前输送带机构和抓手机构;抓手机构包括四连杆机构、吸盘支架以及吸盘;前输送带机构和后输送带机构之间具有使吸盘能够落下的吸盘避让间隙。装备通过吸盘抓取箱装货物的货箱,利用吸盘移动驱动同步带带动货箱沿抓手导向板的上表面向后运动,吸盘运动至吸盘避让间隙内货箱的下方,以避让货箱[4]。本文装备结构设计合理,占用空间小,承载能力强,能够实现货箱的自动连续抓取。

图1 箱式自动装卸机器人结构
3 箱式货物自动装卸机器人工艺流程、技术路线
3.1 工艺流程
箱式自动装卸机器人工艺流程如图2所示,其工艺部分不属于本文设计的主要部分,只做简单说明。
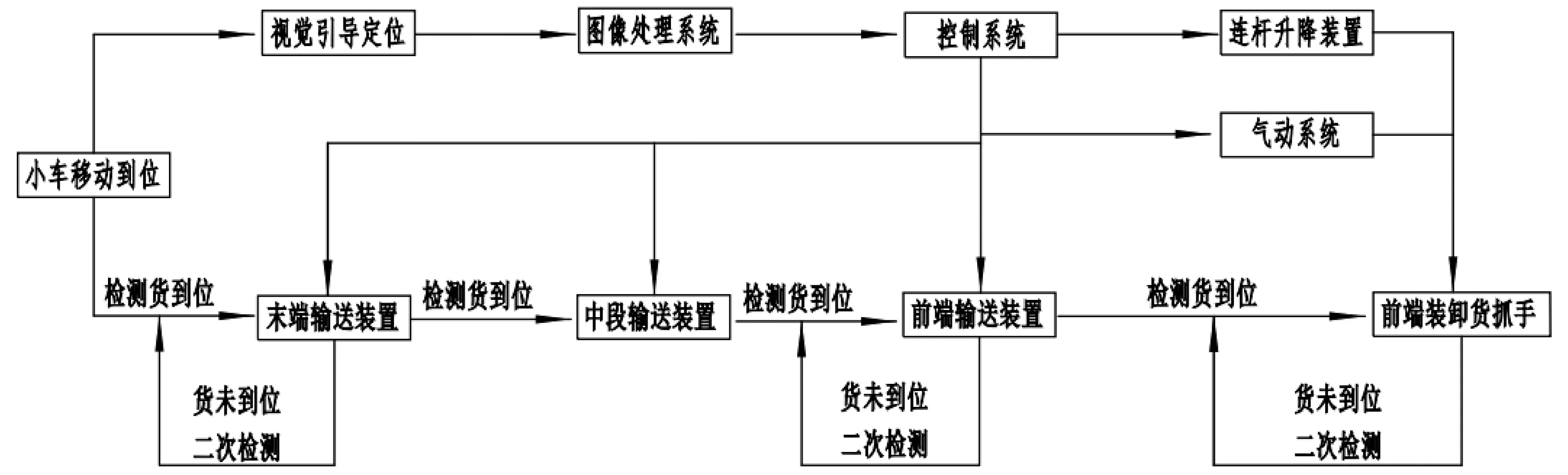
图2 箱式自动装卸机器人工艺流程
以集装箱为例的箱式货物卸车工艺流程主要包括:首先装卸小车通过视觉引导定位移动到密闭集装箱合理空间位置;然后通过图像处理系统获取集装箱内部货物码放的长宽高等空间布局信息;运用卷积神经网络算法进行重新架构分析,获得实际准确的三维图形位置数据信息,并将处理好货物位置数据信息传输到PLC控制系统;控制系统得到相应位置信息数据后,下达运动指令给连杆运动机构,同时控制联合气动系统,实现前端装卸货抓手对不同位置货物的抓取;最后控制系统通过控制前端、中段、末端输送机构完成货物的卸货输送,并通过各输送位置的检测货物装置进行货物流程信息反馈,使该过程与小车定位、装卸货抓手动作等形成完整的闭环箱式货物卸车系统,从而实现箱式货物卸车功能[5]。
3.2 箱式货物自动装卸机器人的技术途径
(1)上下料机构设计。通过四连杆机构运动原理及轨迹分析,建立运动模型,分析吸盘夹具整体上下料的运动曲线;通过同步带将单轴转为双轴输出,满足双输送机构的同步传输。
(2)轮系结构设计。采用双边张紧调节方式实现输送带张紧,提高货箱输送速度。
(3)二转动自由度差动机构设计。采用螺旋锥齿轮提高齿轮啮合精度;实现抓取小臂的上下左右转动。
(4)九辊辊系全新设计伸缩传送。使皮带沿固定方向自由伸缩,通过轮系结构原理保持伸缩后的皮带长度不变。
(5)空间多连杆机构实现多个方向的自由度。通过Motion运行学分析,对整个机械臂的运动轨迹进行分析,确定能达到行程范围内空间上的任意一点;通过最终的回归分析方法,得出整理轨迹的运动方程式。
(6)车辆及底盘结构方面。通过减震弹簧加阻尼器减震缓冲;通过麦格纳母轮控制原理及特定的轮型结构,实现对车辆全方位的位移。
(7)视觉及软件方面。用工业3D相机采集图像,通过卷积视觉神经网络算法对图像重新架构分析,获得准确的三维立体图形,经过自研算法推算,实现对装卸机器人运动轨迹的准确指引以及目标点的准确定位引导。
4 技术关键
装卸机器人的关键技术是设计空间七连杆机构,通过输送长臂和连接前端的伸缩摆动小臂的多自由度结构,在有效行程范围内使小臂前端能够到达装卸作业空间上的任意位置;研发机器视觉系统和空间轨迹控制算法,实现货位连续智能识别和规划,智能控制输送长臂和伸缩摆动小臂快速精确移动定位,完成货箱装卸的自动化、智能化作业[6-7]。
5 箱装货物自动装卸机器人的卸货过程
箱装货物自动装卸机器人为适应集装箱或仓库内货物的位置变化,宏观的整体运动通过麦克纳姆轮实现。
位于前端的小臂机构为适应箱装货物左右方向的位置以及上下方向的位置变化提供过二自由度关节、角度调节机构以及随动输送机构协同动作实现。以卸货为例,当需要装卸仓库或者集装箱内堆叠的箱装货物时,转运车先运动到一个合适的位置,保证小臂机构前端的铲起斜坡可以运动到箱装货物的货箱下方,通过第一电动气缸使大臂机构左右摆动,通过第二电动气缸和第三电动气缸的协同动作调整大臂机构的俯仰运动,随动输送机构的活动架跟随大臂机构沿第一滑块滑动。同时可以根据需要调节的大臂机构的整体长度以补偿小臂机构三自由度运动的需求。箱装货物被小臂机构最前端的吸盘吸起后依次通过前输送带、后输送带、双窄带、第二输送带和第三输送带将箱装货物运出。大臂、小臂机构如图3、图4所示。
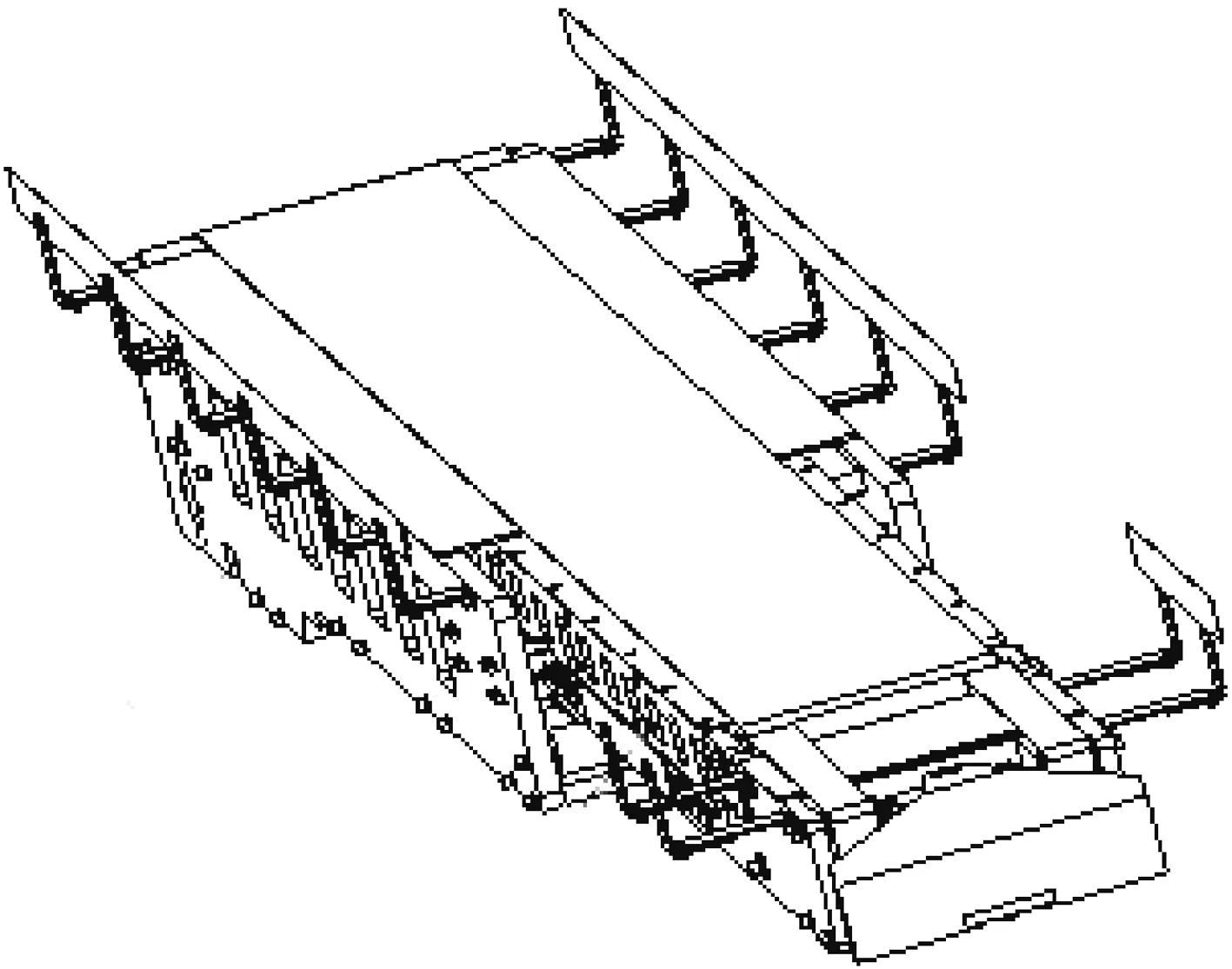
图3 大臂机构
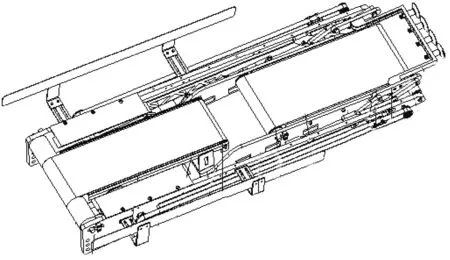
图4 小臂机构
6 结语
(1)全新设计的样条曲线导轨式上下料机构,自动提升货物到一定高度,采取多个小口径吸盘提升带载能力,采用双输送设计提高输送能力,从而满足20 kg及以下箱式货物的抓取和输送。
(2)设计七连杆输送机构、二转动自由度差动机构及多个摆动关节。七连杆机构连接前端机械臂输送机构,实现机械臂在行程范围内能够到达空间上的任意位置,实现前端机械臂连接处关节能够同时进行俯仰及左右转动,扩大货箱抓取作业范围。同时可配套多种型号的前端机械臂上下料机构。
(3)研发应用3D视觉系统、激光测距技术和软件算法,联动控制装卸机器人机械臂运动轨迹并进行实时定位引导,保证货箱装卸定位精度,确保货物精准运送到指定货位。
