上肢外骨骼康复训练装置设计及分析
2022-09-13阚延鹏张师榕
张 振,阚延鹏,陈 玉,葛 攀,张师榕,付 磊
(1.安徽工程大学 机械工程学院,安徽 芜湖 2410002.安徽工程大学 电气传动与控制安徽省重点实验室,安徽 芜湖 241000)
王隆德院士在《中国中风防治报告(2016)》中指出“40岁以上的人中,约有15%是中风的高危人群,患者的年龄呈年轻化趋势,全国每年因中风死亡病例达188万例,已成为中国第一大致死原因”[1]。由于“脑卒中”患者的大脑神经无法对其肢体的运动进行控制,因此需要通过进行重复性的肢体运动姿态训练来帮助患者对其神经产生刺激,重新建立脑部损伤神经与肢体之间的联系[2]。
康复训练系统是一种全新的、高自动化的辅助治疗系统,是机器人技术高速发展和康复工程学相结合的成果,其存在的主要价值是通过自动化设备的牵引完成特定的康复运动姿态,恢复患肢的运动功能。与传统医治方法相比,康复训练机器人的产生代替了传统医治方法,开创了一条新的治疗途径,在临床应用中有较大的优势。使用康复机器人较早地介入康复姿态训练,能够有效地保持各个关节的活跃度,改善患者运动功能的最终康复状态。
人体上肢是一个空间内多自由度的结构,在生活中极具重要性,而上肢外骨骼具备耐久性、低劳动强度和高重复性等优点,患者穿戴上肢外骨骼能有效地帮助脑卒中患者康复,维持关节活动度[3]。吴常铖等[4]设计了一种具有5自由度的康复训练机器人,其中3个自由度可以调整机器人姿态以适应不同体格患者的需求,两个自由度用于患者肢体训练,驱动部件是步进电机和直流电机。鲁守银等[5]为脑中卒引起的偏瘫患者设计了一款主从式上肢外骨骼康复装置,采用符合人体上肢运动规律的主从式结构作为设计基础,利用患者健康侧上肢的运动功能作为控制输入信号。徐晨阳等[6]为了降低绳驱动并联外骨骼的结构不稳定性所带来的运动学建模误差,改善外骨骼对不同穿戴者的适应能力,提升外骨骼的穿戴舒适度,提出了一种7自由度的可穿戴上肢外骨骼康复装置。翟宇毅等[7]针对传统康复机器人重量重、穿戴不便等不足,基于轻量化、易穿戴和人体工学等设计原则,设计了一种3自由度的穿戴式上肢康复训练装置,可以实现肘关节屈/伸及旋前/旋后的运动。许祥等[8]为辅助患者进行后期的高强度康复训练,提出了一种具有4自由度的上肢康复训练装置,可以实现肩关节和肘关节的康复训练。Li等[9]提出一种3自由度的上肢康复训练装置,其串联结构带有一个末端执行器,在水平旋转时具有2个自由度,在垂直运动时具有1个自由度,主要用于上肢肩关节和肘关节的康复训练,由电机和气缸驱动,其结构紧凑,节省空间,易于移动。Duan等[10]为了实现上肢康复机械手各关节轨迹的精确控制,利用SolidWorks建立了6自由度上肢康复机械手的简化模型。Pang等[11]根据“绳齿带”广义绳传动设计方案,设计了一种带张紧机构的6自由度上肢康复训练,并对其进行分析证明合理性。
尽管现有的上肢康复训练装置能提供多样的训练姿态,但是仍存在用于患者训练的自由度数目较少、驱动部件耗能较大、机械结构复杂、适用率低及使用效果不明显等不足。训练姿态的动作幅度过大、运动角度不够以及不安全等因素也可能会造成患者在使用过程中产生不必要的二次损伤。针对上述问题,本研究以人体运动功能和程度为依据,结合上肢在日常生活中常用的5个自由度,设计了一种简易的可穿戴外骨骼康复训练装置,实现了肩关节的前屈/后伸、外摆/内收,肘关节的屈曲/伸展,腕关节的尺屈/桡屈和掌屈/背屈5个康复训练姿态,辅助患者获得有效的日常康复训练。
1 上肢外骨骼康复训练装置的设计
装置的结构设计要依据人体上肢结构的运动特点进行分析,需对其运动自由度、康复姿态等进行确定,进而对外骨骼康复训练装置进行结构设计。
1.1 康复姿态及装置自由度的选定
上肢是人体运动最灵活的部位,肩、肘、腕、前臂和手掌等部位在关节的配合下,完成日常生活中的多种运动。上肢主要依赖肩关节、肘关节和腕关节运动,是人们日常生活中运用频率最高的关节。其中,肩关节的前屈/后伸、外摆/内敛和旋内/旋外,肘关节的屈/伸与前臂的旋转,腕关节的尺屈/桡屈和掌屈/背屈是人体上肢的主要运动自由度,运动示意图如图1所示[12]。因关节及所处位置的不同,其需要完成的动作和功能也不同,因此每个关节所需自由度的运动范围也不同,手臂主要关节活动范围表如表1所示。结合人体上肢运动特点,本文确定了上肢康复训练装置以肩部的前屈/后伸和外旋/内旋、肘部的屈曲/伸展以及腕部的尺屈/桡屈和掌屈/背屈进行运动。
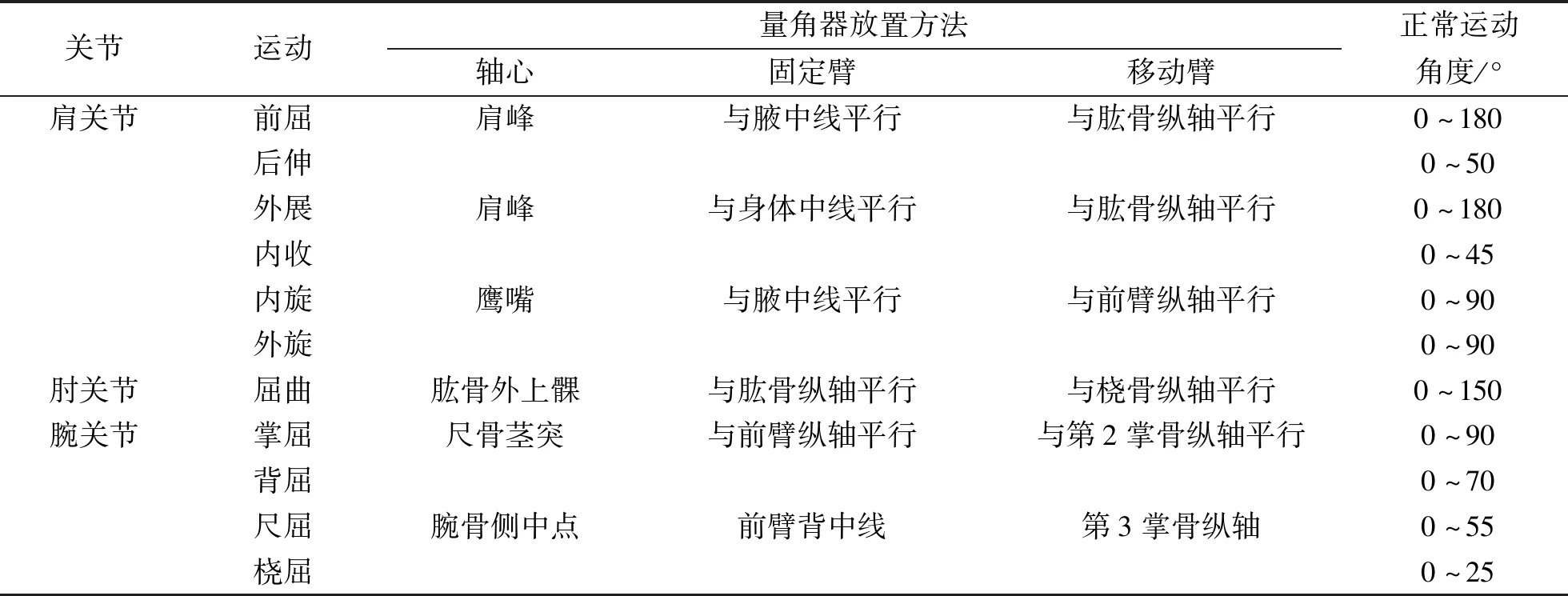
表1 手臂主要关节活动范围表
1.2 康复训练装置的机械结构设计
结合人体结构特征、选定的自由度及确定的康复姿态,以人体右上肢为例,其各个关节的运动自由度简图如图2所示。依次是肩关节的前屈/后伸(J1)、外展/内收(J2)、肘关节的屈曲/伸展(J3)、腕关节的掌屈/背屈(J4)、尺屈/桡屈(J5)。此外,为了满足不同患者的需求以及不同的臂长和手掌尺寸,在康复训练装置的上臂(l2)、前臂(l3)两个位置可以对尺寸进行调节。结合自由度简图使用SolidWorks设计了外骨骼康复训练装置的三维模型,如图3所示。各动作的执行依靠设置在各自由度处的舵机驱动,可以在固定的角度内往复循环,也可以通过延时控制速度变化。舵机电路简单、结构简单、质量轻,具有轻便性,可以在固定的角度内往复循环,也可以通过延时控制运动速度,用于康复训练装置。
依据设计要求,肩关节处承载了人体整个上肢的重量,所需的扭矩也最大。现以身高175 cm、体重60 kg的男性成年人为研究对象,根据GB10000-88成年人人体尺寸国家标准(如表2所示),肩关节、肘关节和腕关节处的最大驱动力矩如表3所示。根据力矩数值要求,各关节分别选用SM-120B-C003、DS5160和MG995型舵机。

表2 身体各部分占体重比例

表3 各关节处的最大驱动力矩
1.3 外骨骼装置的正运动学分析
正运动学分析是指对于特定的机械手,根据连杆参数和各关节变量计算末端执行器相对于选定坐标系的位置和姿态,从而判断各关节的运动状态是否正常。基于D-H坐标系一般原则建立D-H坐标系如图4所示,根据连杆之间的结构参数列出各关节的参数如表4所示。

表4 各连杆之间D-H参数表
(1)

使用Matlab建立外骨骼装置的运动学模型,其可视化仿真及关节曲线如图5、6所示。由图6可知,上肢康复训练装置的5个自由度能在设定的空间范围内运动,运行平稳,末端轨迹运动趋势没有干涉。验证了运动学方程的正确性,以及外骨骼装置设计的可行性和合理性。
1.4 控制方案的设计
为了实现上肢外骨骼康复训练装置进行关节运动角度范围、训练速度和康复模式的主动控制,通过按键和电位计调节的方式对特定的功能进行控制,控制关节的运动幅度在正常活动范围内,可以有效地避免对患者的肢体造成二次损伤。其运动控制流程图和各控制器执行方案如图7和表5所示。

表5 控制方案简述
1.5 实物制作及空载角度验证
整体实物通过ABS耗材经过3D打印制作而成,经组装得到如图8所示的实物。为了验证实物运动姿态的准确性以及使用的安全性,在空载时对各项功能进行了测试,其测试结果如表6所示。由表6可知,该上肢康复装置能实现肩部的前屈/后伸和外旋/内旋、肘部的屈曲/伸展、腕部的尺屈/桡屈和掌屈/背屈。所测的数据均低于预计角度,且误差均在5°之内,没有超过极限角度,空载时的关节活动度均在人体正常活动范围内,可以保证其安全性。
2 实验测试及分析
根据人体体质量标准,实验测试邀请了10名成年人(5男5女)参加,分别是3位偏瘦者(1、2、3)、3位正常体型(4、5、6)、4位偏胖者(7、8、9、10)。实验过程中参与者将康复装置穿戴于右臂之上,并对表6中的各项功能进行往复10次体验。对不同姿态运动时的舒适、难易和过程进行综合评分,每种姿态对应10分,分值越高表明装置的姿态灵活性、舒适性及自主操作能力越好,实验结果如表8所示。

表6 空载时各关节运动数据分析
在体验过程中,通过JY61P角度传感器记录每种姿态下机械臂的实际活动范围,如表7所示。由表7可知,随着上肢重量的加重,上肢康复训练装置在每种姿态下的活动范围逐渐减小,均在正常范围内。在体验结束时,根据参与者的体验状态对上肢康复训练装置所提问题进行客观评分,评分指标及结果如表9所示。

表7 参与者进行实验时各关节运动数据分析

表8 实验评价结果

表9 问题评价指标及结果
表8的实验结果表明,各项姿态在执行过程中其评分均达到8分以上,表明本研究所设计的上肢外骨骼康复训练装置有较好的适应性,具有舒适、高灵活性以及自主操作能力好等优点,较好地完成了预期规定姿态的控制,能实现用户的被动训练。通过问题评价指标及其结果也可以看出,装置在可穿戴性、自主操控以及姿态的短暂记忆方面有一定效果。而对于使用过程中的发力以及使用后实验者较为疲惫的问题,通过询问得知可能是实验者在使用过程中有些许紧张导致,并非装置的原因。
3 结论
本文针对“脑卒中”患者肌无力、无法自主康复训练等问题,设计一种5自由度的可穿戴上肢外骨骼康复训练装置。
(1)通过对上肢外骨骼装置结构进行运动学分析及仿真,表明各关节自由度能较好地在设定角度范围内进行运动,验证了模型的合理性和可行性。
(2)利用按键和电位计调节的方式可对特定的康复姿态进行控制,能实现对上肢外骨骼康复训练装置进行康复模式、运动角度以及训练速度的主动控制。
(3)选取3类不同体型的参与者佩戴上肢康复训练装置进行实验,实验结果表明,随着体质量的增加,关节运动范围逐渐减小,但仍在正常活动范围内。通过建立评价实验对上肢外骨骼康复训练装置进行测试,结果显示各项康复姿态在执行过程中其评分均达到8分以上,表明本研究所设计的上肢外骨骼康复训练装置能较好地完成预期规定姿态的控制,参与者客观的体验评价也表明该装置具有较好的适用性效果。
