HPM对无人机数据链干扰效应研究
2022-09-09任远桢张厚强
高 畅,任远桢,张厚强,蔡 强
(1.中国人民解放军91550部队,辽宁 大连116023;2.北京无线电测量研究所,北京100854)
0 引言
无人机由于良好的隐身性和出色的机动性,在现代战场上起着重要作用。它具有规避雷达探测和稳定跟踪的能力,从而缩短了反应时间,大大降低了被防空系统拦截的可能性。因此,更合适拦截无人机的方法正在进一步研究[1]。高功率微波(High Power Microwave,HPM)指频率在100 MHz~30 GHz范围内,脉冲峰值功率在100 MW以上的高电磁能量[2],具有光速传播、全天候工作、命中率高、发射成本低和多目标攻击等特点,较传统空防装备有着不可比拟的优越性,主要用作超级干扰和近程防御等应用,是保证防空能力的重要环节[3-5]。
HPM的损伤威力和目标的易损性是判断电磁干扰是否有效的2个重要指标,对无人机的影响主要表现为干扰、降级和损坏。干扰是指电磁辐射使电子系统工作发生异常;降级是指关键器件性能下降或非关键器件损坏;损伤是指系统内部发生烧毁或致命损坏。
研究者们对高能量电磁脉冲作用于无人机进行了数值计算及测试实验的研究,文献[6]通过UWB电磁脉冲辐照效应实验,分析了无人机数据链失锁效应的机理及防护方法;文献[7]利用SIMULINK构建无人机通信系统模型,对电子系统的易损性进行论证分析;文献[8]提出了差模定向注入等效替代强电磁脉冲辐射效应的实验方法,对比实验验证了实验室环境下差模定向注入替代HPM辐射的有效性,但由于辐射波形是无规律波形,难以准确实现用注入试验的方法进行等效研究;文献[9-11]在电波暗室中对无人机机载数据链展开L,S,C波段的HPM辐射效应实验,但实验室环境下多为理想情况,未考虑实际应用中复杂电磁环境等多种随机因素。为进一步探索HPM对无人机干扰效应行为的变化规律,本文构建某型无人机数据链系统行为级仿真模型,研究其敏感部位的电磁干扰效应,加入能量衰落及多种损耗影响,并开展HPM对抗无人机外场试验,分析HPM对无人机数据链的干扰效应机理和行为变化规律。
本文讨论了HPM对无人机电磁干扰机理分析;利用SIMULINK构建HPM对无人机数据链行为级模型;对仿真结果的数据链性能进行分析;对方法有效性进行试验验证,并提出了本文工作对工程应用的意义;最后给出了结论与展望。
1 无人机电磁干扰机理分析
HPM辐射经大气传输至目标,一般要经历“前门”或“后门”的耦合传输到达目标无人机内部器件上。“前门耦合”是指HPM通过天线和传感器等与外界连通通道进入系统的耦合过程。“后门耦合”是指辐射通过无人机上的孔缝、焊缝和电缆接头进入系统。无人机天线作为接收和发送信息的主要载体,在对抗过程中直接暴露于强电磁干扰环境中,它是干扰信号的入口,也最易受到干扰或破坏[12-13]。前门耦合干扰效应大多发生在射频前端电路中,HPM进入天线后转换成瞬态电流和瞬态电压,沿射频电缆注入无人机内部各系统电路,这种耦合方式直接作用于较为脆弱的部分,对设备产生巨大威胁并直接影响系统的易损部件。HPM进入无人机电子系统的耦合过程如图1所示。

图1 HPM耦合至无人机过程Fig.1 Process of HPM coupling to UAV
当确定HPM源的发射功率和天线增益时,到达无人机天线端的电磁能功率可由Friis传输方程得到,到达接收天线输入端的干扰功率为[14]:
(1)
式中,Pt为微波源的发射功率;Pr为耦合到目标无人机天线内的功率;Gr为目标无人机天线的增益;Gt为HPM发射天线的增益;Le为传输损耗;λ为波长;R为目标天线距发射点的距离。
HPM在传播过程中通常按照球面波的传输损耗。由于空气中各种因素的影响,考虑空气颗粒、温度和湿度等各种因素,需要在传播损耗中加入修正值。本文假设电磁波在传播过程中仅考虑自由空间损耗,可得到达无人机接收天线输入端的实际干扰功率。HPM耦合到某型无人机天线端功率如图2所示,k为某具体数值。
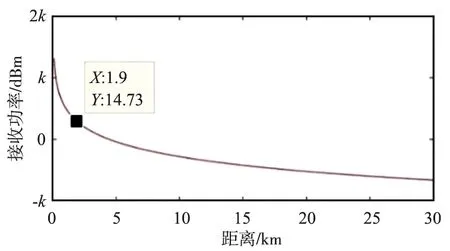
图2 HPM耦合到某型无人机天线端功率Fig.2 Power of HPM coupled to antenna end of a certain UAV
对于常用C/A码接收机,最大输入功率不能超过15 dBm,否则接收设备系统会饱和,无法提取有用信息[15]。由图2可以看出,若HPM耦合到某型无人机的干扰信号功率达到15 dBm,则距离为1.9 km,因此对于该型无人机,可简单估算其在1.9 km的距离内受到HPM电磁干扰。
不同型号的无人机内部电子系统结构有所差异,不同的制作工艺、条件和指标均会影响无人机的抗干扰能力。通常,军用无人机还会增加电磁防护措施,比如抗干扰模块和屏蔽电磁波技术,因此要给出某具体型号无人机的抗干扰阈值难度很大。根据多种电磁环境下无人机受到电磁干扰的概率统计,指出数据链系统[16-17]和GPS导航系统[18]是抗干扰能力较弱的2个部分,下文针对某侦查型无人机的数据链系统进行行为仿真分析。
2 数据链系统行为模型设计
行为仿真是把系统功能分为子模块,考虑各模块间输入与输出的对应关系即可,不需要获取电路具体信息。无人机中数据链系统、GPS和指控系统等绝大多数设计都基于典型电路,但是内部的诸多模块指标涉及商业及军事信息,因此本文采用行为级电路仿真方法,将各功能模块视为“封装”数字模块,从而构建数据链行为模型,有效地描述无人机数据传输系统运行情况和变化特征。误码率是数据传输准确性最直观的指标,因此,该模型通过误码率衡量无人机受电磁干扰后的行为状态,仿真过程如图3所示。

图3 数据链系统行为模型仿真过程Fig.3 Simulation process of data link system behavior model
无人机地面基站发射数据传输信号经由信道到达机载数据接收端,HPM从天线波束的主瓣或副瓣耦合至无人机数据链系统中,对其性能产生干扰影响。以发射频率2 GHz、半径0.8 m的圆口径天线为发射装置的HPM源为例,在波束指向不偏转情况下,其方向图如图4所示。

图4 HPM源发射天线方向图Fig.4 HPM transmitting antenna pattern
为了尽可能地接近实际情况,在信道中引入噪声源及传输损耗。式(2)标记HPM波束进入无人机接收天线的增益:
(2)
由于接收天线与电磁波之间的极化关系,引入了极化损耗ρ,则进入射频前端的电磁能量为:
(3)
对于采用自适应抗干扰技术的无人机,还需引入外界干扰抑制系数ρj,HPM带宽与接收天线带宽的重合因子f(Br,Bj):
二是据以定案的证据都已经经过法定程序查证属实,这突出的是证据本身的要求。该条件关注的是证据能力问题,配套的是我国刑事诉讼法“非法证据排除”规则。
(4)
(5)
无人机在无干扰情况下,耦合到机载数据接收端的信号功率Pj为:
(6)
式中,Pe为地面基站发射功率;Ge为基站天线的增益;λj为无人机数据链上行传输波长;Rj为无人机距地面基站的距离。由式(4)和式(6)可得到无人机受到电磁干扰影响的信干比:
(7)
式中,数据链自身噪声系数为F。由于HPM是有一定占空比的脉冲式电磁干扰信号,在不产生脉冲期间,无人机数据解调器的信噪比为:
(8)
若脉冲的占空比为ρt=τ/T,T为脉冲周期,τ为脉冲宽度,则在HPM电磁干扰效应下的无人机数据链系统平均误码率为:
BER=(1-ρt)BERSNR+ρtBERSJR。
(9)
以某小型无人机为例构建其受HPM电磁干扰的行为仿真模型。机载天线为等效面积0.003 m2的全向天线,系统性能参数及指标如表1所示。
基于SIMULINK软件构建的无人机数据链受HPM电磁干扰的行为仿真模型如图5所示,主要由数据信息源、数据链发射系统、信道、数据链接收系统和HPM源5个部分组成。

表1 某型无人机数据链参数指标表
数据源采用多媒体音频信号。数据链发射、接收系统可看作互为逆过程,采用抗干扰无线数据链路,将编解码、调制解调和扩频解扩等功能以模块化形式构成。信道主要由路径损耗、信道衰落和噪声等模块组成,由于仿真路径较长且HPM沿多路径传播,引入自由空间传输损耗和信道衰落计算模型。HPM源模块实现了微波能量以电信号形式进入无人机数据接收系统,产生电磁干扰效应,该模块构建了可调节工作频率、占空比等参数的HPM信号,并增加了远距离能量衰落及多种损耗,以更贴近实际情况。HPM源模块所产生的时域、频域波形如图6和图7所示,脉宽为100 ns,工作频率为1.9 GHz的HPM脉冲,其幅度可由功率放大器根据实际发射源等效辐射功率调节。
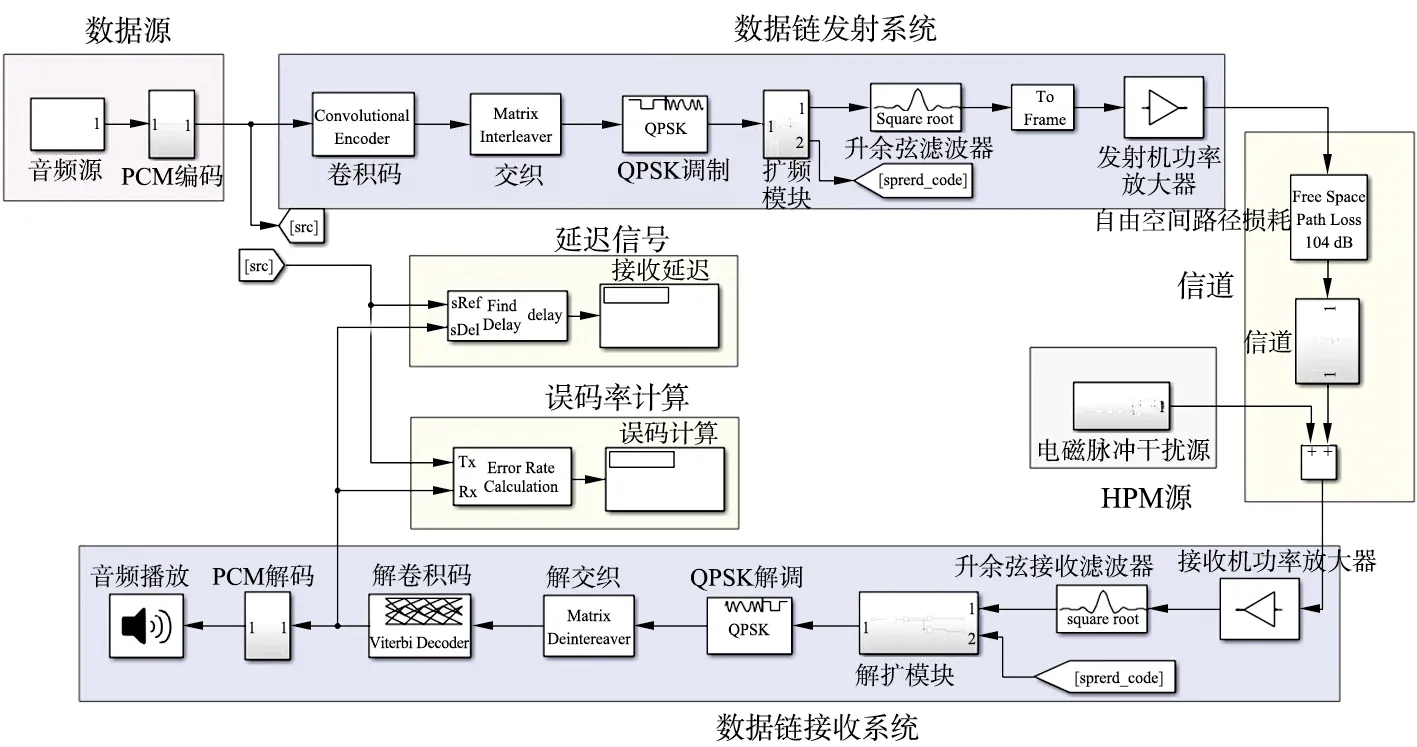
图5 HPM对无人机数据链电磁干扰行为仿真模型Fig.5 Electromagnetic interference behavior simulation model of HPM to UAV data link

图6 HPM模块产生的时域波形图Fig.6 Time domain waveform generated by HPM module
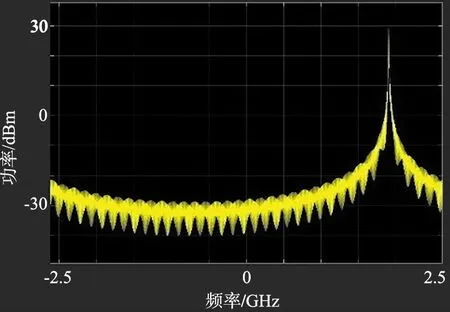
图7 HPM模块产生的频谱图Fig.7 Spectrum generated by HPM module
3 结果分析
HPM源产生的电磁信号是时域上的窄脉冲干扰信号,对无人机数据链干扰的影响作用方式主要为功率压制和数据阻塞,其干扰效果主要表现在飞行控制系统发生故障时,这时电磁能量是数据信号出现突发性错误或发送虚假控制命令所导致。发生干扰效应后,系统信噪比降低,导致数据链无法捕获基站信号,同时正确解码率降低,电子系统受到冲击产生瞬态电流,影响无人机数据链的正常工作。
原始信号和误码率为1%的受干扰信号波形如图8所示。此时,误差矢量幅度(EVM)达到50%,通常EVM的最低要求为不超过17.5%,显然此时不可能对原始信号进行正确解调。受到HPM辐照后,放大器或混频器出现饱和现象,数据解调输出噪声增大,传输误码率增高,灵敏度下降,指控传输信息失真,进而发生数据链路中断等效应。

(a) 原始信号

(b) 误码率为1%的干扰波形图8 原始信号和误码率为1%的受干扰信号波形Fig.8 Waveform of original signal and interfered signal with bit error rate of 1%
设定HPM工作的重复频率为100 Hz,脉冲宽度为100 ns,工作频率为1.9 GHz,HPM源距离目标无人机5 km,保持各参数条件不变,通过调节干扰功率参数,可得到等效发射功率对数据链路性能的影响,如图9所示,p为某数值。

图9 HPM发射功率对无人机数据链性能影响Fig.9 Effect of HPM transmit power on UAV data link performance
在保持HPM等效发射功率、工作频率和脉冲宽度等条件不变的情况下,通过改变HPM的重复频率,可得到重复频率对数据链性能影响,如图10所示,重复频率达到1 000 Hz时,误码率为0.078,此时数据传输受到严重影响。由此可见,提高HPM源发射功率和重复频率,可加大对无人机的干扰效应。

图10 HPM重频对无人机数据链性能影响Fig.10 Effect of HPM PRF on UAV data link performance
误码率随干信比变化的趋势如图11所示。从图中可以看出,随着干信比的增加,无人机数据链误码率开始缓慢增加,到达拐点后误码率迅速增加。这反映了该型号无人机具有一定的抗干扰能力,但外界HPM干扰强度超过某一临界值时,无人机的性能会发生断崖式下降。
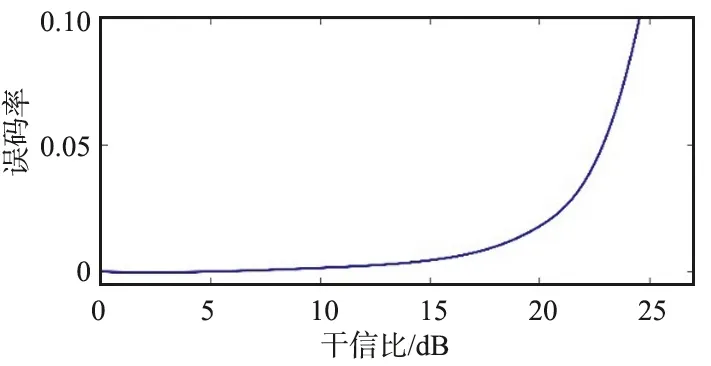
图11 误码率随干信比变化的趋势Fig.11 Variation of bit error rate with interference-to-signal ratio
4 方法有效性试验验证
HPM往往协同多种设备联合运用,存在复杂电磁空间环境等随机因素。电磁能量由前门、后门同时进入无人机内部各系统,实验室中常进行的注入等效实验和辐射等效实验通常是对无人机电子器件或分系统进行测试,可分析研究部分电子系统性能的变化规律,不能代替HPM实际场景下的无人机干扰效应。因此,为验证HPM实况下的干扰效能,还需进行HPM对抗无人机的外场辐射试验,并将试验结果与仿真结果比对,校正完善后形成固化模型,得到符合复杂电磁环境下的最佳干扰效应方法。
将HPM对抗无人机外场试验中的指标参数输入至图5的干扰效应行为仿真模型中。HPM对抗某小型无人机辐照试验结果与行为模型仿真对照表如表2所示(E1为某具体数值)。

表2 某型无人机模型仿真与实验结果对照表
由表2可以看出,仿真误码率小于0.001时,辐照试验中无人机飞行姿态无异常;误码率达到0.01时,试验中地面站可正常接收无人机飞行信息,但机载端无法执行地面站指令;当试验中地面站无法接收飞行信息,无人机发生偏航且无法执行地面站指令时,此时HPM源各参数得到的仿真误码率为0.018;继续增大HPM辐射功率至无人机坠毁,各参数得到的模型误码率为0.1。辐射试验中行为仿真模型计算的误码率与辐照试验中无人机受干扰影响的行为结果有一定相关性,该模型可较好地描述无人机受干扰效应的行为变化规律。
由于HPM辐射试验本身费用很高,且无人机干扰测试需要大量效应物,减少实验样本可大幅提升效费比。HPM对无人机数据链行为级模型通过调节软件模块,可对HPM源的等效发射功率、发射频率、脉冲宽度、占空比、作用距离、目标天线接收增益和抗干扰阈值等多种参数进行设置。在工程应用中可利用该模型预估指标要素,达到精准设计参数、提高决策效率的目的。该方法实施简单、数据获取方便,可根据仿真计算,确定能量参数、作用距离等关键要素,制定试验设计方案,从而达到降低试验样本、减少无人机飞行航次及效应物的目的。
5 结束语
随着无人机技术的应用普及,利用无人机对重要设施、场所实施侦查窃密、干扰袭击的风险也与日俱增。HPM拥有传统防空装置不具有的优势,是对抗来袭无人机的“杀手锏”。本文以某小型无人机为具体研究对象,对其数据链系统进行HPM干扰效应分析及仿真计算,论证了HPM对抗无人机的可行性和有效性。该方法具有一定的普遍性,可针对其他型号无人机改变各模块参数进行研究,还可推广应用于其他电子设备的电磁干扰研究。后续可将仿真模型与辐照试验进一步校正完善,形成固化模型,为HPM对无人机干扰效能评估的现实需求提供关键技术支撑,同时为提高能量效益提供重要依据。
