基于卡口图片数据的城市地块停车需求特征分析
——以常州市政府片区为例
2022-09-07龚大鹏李兴东程晓明
龚大鹏,侯 佳,李兴东,程晓明
南京市城市与交通规划设计研究院股份有限公司
0 引 言
1 卡口图片数据预处理
1.1 卡口图片识别
本研究以2019年江苏省工信厅——工业和信息产业转型升级专项资金课题《城市级停车管理云平台》为基础,选择常州市政府片区为研究实例,如图1所示,蓝色虚线部分为研究片区,片区内有市政府、奥体中心、河海大学、万达广场等多种性质建筑设施,具有通用性及代表性。为增加片区研究的准确性和科学性,采集卡口数据的点位不仅包含片区内部,而且使普通道路延伸至片区外一个交叉口,高架及快速路延伸到西侧龙江立交和东侧青洋路立交。获取的卡口点位根据卡口的位置及图片内容,分别与路网的道路或交叉口匹配,卡口点位分布及卡口图片示意图如图1所示。

图1 研究实例片区范围、卡口图片及点位分布示意图
基于车辆及车牌的形态学特征,本研究使用深度学习的重新训练和参数优化,得到车辆车型和车牌的图像识别算法模型,具体图像识别算法本文不做深入阐述[13]。本研究获取高架及地面道路共92个卡口点位(包含交叉口、高架、匝道等),每个点位包含道路不同方向、不同车道信息,总计获取851个路段车道点位。时间维度获取的数据为2020年10月12日至2020年11月08日共计4周(28天),卡口图片总量超过1亿张。考虑到卡口图片数据的保密性及图像识别所需要的巨大计算机算力,本次图片识别环境布设在公安内部机房,基于多块深度学习计算GPU卡共耗时30 d×24 h计算完成。算法识别过程如图2所示,最终得到卡口数据包括:卡口编号、卡口所在的道路link编号、所在车道编号、过车时间、车牌号码、车辆车型、车牌颜色等信息。
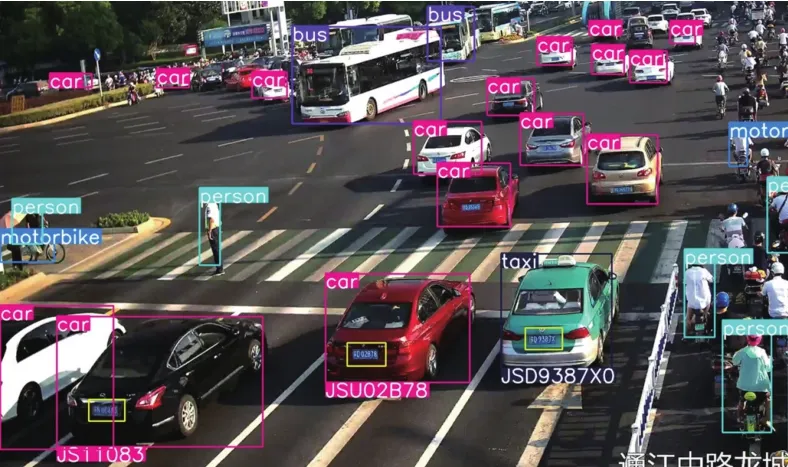
图2 卡口图片识别过程示意图
1.2 车辆出行提取
停车的静态特征与出行的动态特征是相互联系的,只有准确把握车辆出行,才能有效分析车辆停车特征。在上述识别卡口图片得到的信息中,通过以下步骤得到车辆的出行时间、出行起终点、出行轨迹等信息。
(1)卡口点位与GIS道路网匹配,包括复杂高架、地面道路、匝道等点位的匹配;
(2)基于时间序列判断每个车牌号对应车辆的行驶时间、所在卡口路段;
(3)基于道路等级等限速特征计算各路段的行程时间;
(4)基于同一车辆先后经过相邻两卡口之间的所有路径设计时间最短路算法,计算相邻两卡口的最短行程时间,判断两卡口真实行程时间是否满足行程时间阈值(本次阈值使用绝对值2 000 s、最短路时间4倍、最短路时间1/2倍等特征判别),若满足则为连续的出行,若不满足则为两次出行的中断点;
(5)基于每个车辆(4)步骤中的连续和中断的出行判别,切分和合并车辆出行链,得到车辆出行链数据如表1所示(仅展示部分字段)。每一行为车辆行驶的一次出行,卡口点位列表为该次出行经过的所有卡口路段编号,完整路径为该次出行经过的所有路段编号(由于一次出行经过的路段较多及表格篇幅限制,只展示表格第一行出行完整路径为['L174235','L67319',L24728','L24729','L24731','L431566','L434072','L724','L1854','L1855','L736','L706','L707','L1859','L29454','L29455','L433971','L29456','L20419','L20420','L28942','L29413','L29414','L130287','L130288','L72813','L29463','L434104'],其他完整路径不做展示)。
美通社(美国企业新闻通讯公司)全球副总裁柯佳时畅想:将来的人类生活,屏幕会无处不在,甚至,“你可以一边刮胡子,一边在镜子里看新闻” 。回归当下,人们猛然间发现,所有新闻都在以讨论的方式展开,所有的信息都在议论中传递,所有的媒体人都处在一个巨大的变化中,无论现在还是未来,人们不再缺少信息,而无处不在的、冗余繁杂的信息端口,会让所有媒体人看到,“准确”比“第一”更重要。
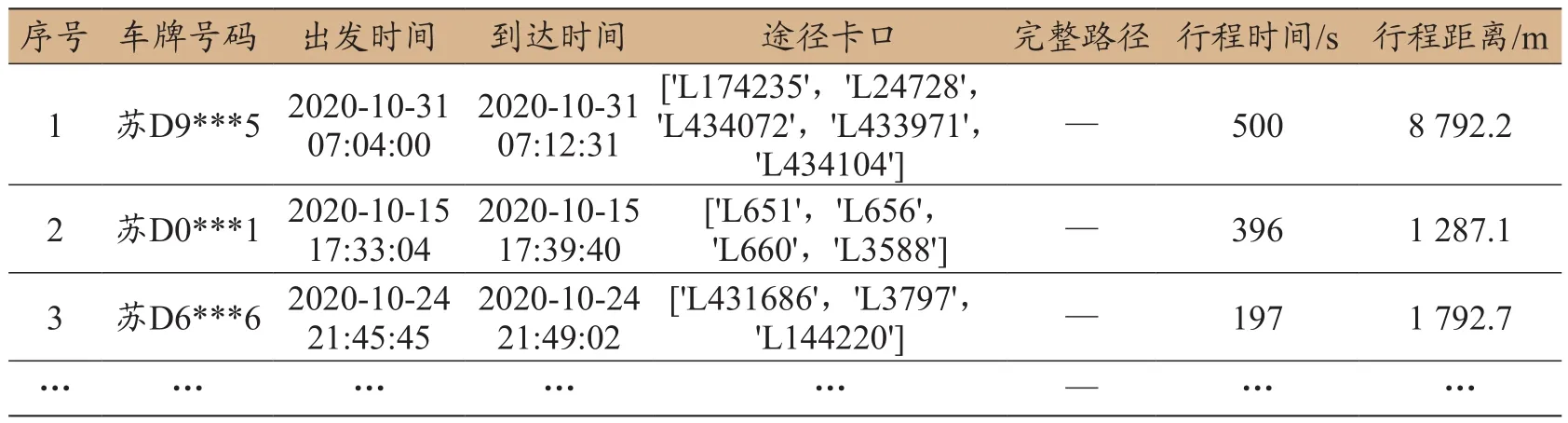
表1 车辆出行提取后的数据示例
(6)本研究共得到所有车辆出行13 564 265次,日均出行约48万次,每车日均出行2.03次。
1.3 关联地块生成
计算得到的车辆出行起终点为卡口点位所在的点或者道路线上,然而车辆的最初出发点和最终到达点都不仅仅是道路上的点或者线,应该是道路围合成的地块(面)区域。本研究基于车辆起终点所在的道路、车道及路网拓扑关系,判断所有卡口点位的来源和可能去向地块,并基于计算机算法直接以路网GIS文件为基础生成各卡口点位对应的来源和去向所在地块。在卡口点位与地块关联过程中,重点考虑以下因素:①地块仅统计城市干线道路围合区域,支路不考虑;②地块之间不重叠;③高架及匝道卡口点位对应的地块应为与其拓扑相连的最近的地面干线道路围合区域。通过以上算法得到本研究92个卡口点位、851个路段车道所一一对应的共计101个地块,与卡口点位不相关、且不在研究片区内的地块不做研究。
2 基于职住的缺失出行恢复
2.1 车辆职住判断
为深入分析地块停车需求特征,需要掌握车辆停车性质(例如居住停车、岗位停车、弹性出行停车等),因此需要对每个车辆的居住岗位、出行目的等特征做进一步的判断。每个车辆的职住规律通过以下算法计算得到:
(1)提取某一车辆单次出行的出发、到达时间点st1、et1,到达点地块编号z1,时间相邻的下一次出行出发、到达时间点st2、et2;
(2)判断是否满足et1<23:59(当日)、st2>04:00(次日)、st2-et1>6 h,满足条件则判断到达点z1为夜间居住停车点;
(3)判断第一次出行到达时间et1至第二次出行出发时间st2的时间区间是否满足在周一—周五09:00—12:00、14:00—17:00区间内停留超过3.5 h,若满足条件则判断到达点z1为岗位停车点;
(4)基于该车辆28天数据分别计算(1)~(3)步骤,提取居住和岗位频率在10天以上的停车点地块编号,则为该车的职住地块。例如苏D1***3的居住、岗位地块分别为83、101;而有些车辆可能会有多个居住岗位地块,例如苏DZ***R居住、岗位地块分别为[73,96]、[27,43]。
2.2 缺失出行恢复
在所有车辆的28天出行中,存在一部分车辆有去无回的出行记录,例如某一车08:00从地块z1出发、08:30到达地块z2,而相邻下一次出行是第二天08:10从地块z1出发、08:40到达地块z2,因此可以看出第一天08:30—第二天08:10之间缺少了从地块z2回地块z1的出行。本研究基于上述得到的车辆规律性出行的居住岗位地块,以及同时得到的居住岗位出行相对规律的时间点,判断车辆出行是否发生缺失。把已有出行数据划分为训练集和测试集,使用机器学习中的有监督学习KNN算法(最近邻算法),KNN算法的距离使用欧氏距离,见公式(1),分别恢复缺失出行的出发、到达时间和出发、到达地块编号4个变量。通过对28天出行数据进行处理,共恢复缺失的出行次数为48.8万次,约为原始出行一天的出行量。

式中:d(x,y)为样本点之间的欧氏距离;xi,yi为用于计算欧氏距离的变量坐标,在本研究中主要为出发、到达时间和出发、到达地块编号4个变量。
3 地块停车需求特征分析
3.1 片区每日停车特征分析
基于2.1节和2.2节得到的车辆职住特征和补全后的出行数据,按照职住特征、地块聚合28天数据进行计算,筛选片区内所有地块得到片区内停车需求总量日均约9.2万辆,其中居住停车需求量日均约4.0万辆、岗位停车需求量日均约2.1万辆、其他弹性出行停车需求量日均约3.1万辆。如图3所示,28天数据分成四周展示,每周同一天的停车需求量波动性非常稳定,根据标准差计算波动百分比的平均值约为1.5%。其中居住停车需求量和片区内车辆出行次数相关,且每日居住停车需求量约占总出行次数的40%;岗位停车需求量在周末有明显的下降趋势;其他弹性出行停车需求量在周末有上升的趋势,且弹性出行每周同一天相较于居住和岗位波动性较大,主要是因为弹性出行受到的影响因素较多,与刚性出行相比,出行随机性较大。
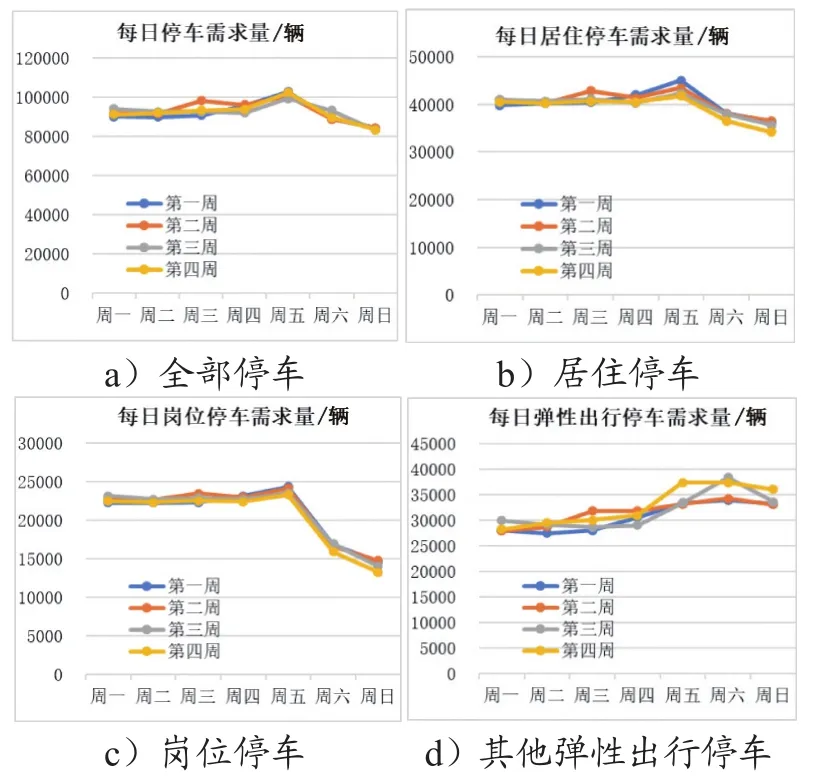
图3 每日停车需求量变化(按周分布)
3.2 片区小时平均停车特征分析
如图4所示,按照24 h对片区内各种性质停车需求量进行平均聚合计算,从图中可以看出居住停车需求量由于夜间休息停车的原因,14:00之后需求量逐渐增加,晚高峰17:00—19:00期间多数车辆到达家中,因此居住停车需求量最大;岗位停车需求量的增加主要集中在早高峰07:00—09:00期间;弹性出行全天停车需求量较为平均。
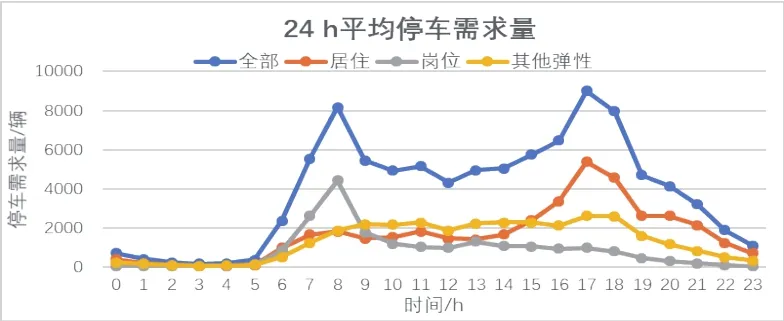
图4 研究片区内24 h平均停车需求量变化
3.3 片区地块停车需求量分布
基于各地块每日平均停车需求量,按照停车需求量数值大小在GIS中展示各地块的分布,如图5所示。工作日居住停车需求量主要集中在居住小区较为密集的地块,工作日岗位停车需求量则主要集中在市政府、密集写字楼等地块,周末弹性出行停车需求量主要集中在万达广场、奥体中心等商业娱乐地块。

图5 片区居住岗位弹性停车需求量分布
3.4 地块停车结果验证
基于上述得到的地块停车数据,选择大型居住地块(编号为46,地块内有多个大型居住小区)、市政府地块(编号为93,主要为政府办公)、万达广场地块(编号为56,主要为商业娱乐)三个属性地块的停车场入场闸机车牌数据对结果进行验证。算法计算得到的地块停车需求量与真实停车量进行比较,如图6所示为地块46在2020年10月14日的24 h停车需求量计算结果与真实值对比。为了定量描述算法结果的精度,提出如公式(2)所示平均相对误差表示方法,地块46、93、56的算法平均相对误差分别为7.56%、3.23%、5.05%。
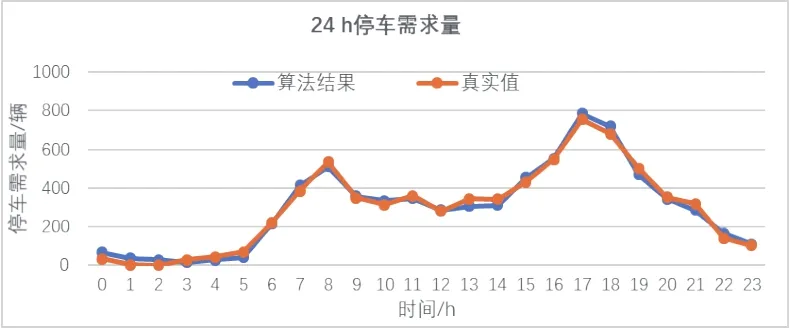
图6 地块46在2020年10月14日的24 h停车需求量计算结果与真实值对比
式中:Pai为第i时段停车场入场闸机实际检测停车量;Pci为第i时段算法计算得到的停车辆;n为验证数据集的所有时段第i时段的总数量;MRE为平均相对误差。
4 结 语
本文基于卡口图片数据通过图像识别算法识别卡口图片中的车牌号等信息,基于卡口位置及车牌号信息获取车辆出行,并基于此判断车辆职住、恢复缺失出行,分别对片区停车需求量的每日特征、小时特征、通勤特征进行分析,最后选择部分地块停车场入场闸机车牌数据对算法结果进行验证。由于卡口点位分布密度不均匀,后期可通过增加出行末端的小区、商场等其他建筑设备内部停车场闸机车牌数据的匹配,完善车辆地块停车需求特征;未来也可以与地块用地性质相结合,进一步分析城市居民出行特征[14]。