双绕组永磁同步电机的模块化对等控制
2022-09-07曾国宏董玉昆吴学智罗晓赵敏如
曾国宏,董玉昆,吴学智,罗晓,赵敏如
1. 北京交通大学 国家能源主动配电网技术研发中心,北京 100044 2. 北京航天万源科技有限公司,北京 100176 3. 北京电动车辆协同创新中心,北京 100044
在光伏电池和储能电池供电的无人飞行器电机驱动系统中,采用分布式光储供电系统,将光伏和储能电池小规模成组配置为低压供电单元,无需大量电压较低的单体电池串联,提高系统安全性。在驱动系统中采用多相电机,对电机绕组的耐压水平和逆变器开关器件的功率等级要求降低。
多相电机相比于三相电机,具有冗余容错结构,可以提高系统的可靠性,目前在船舰、航空和电动汽车领域得到了广泛应用。多相电机一般分为2种,一种是对称绕组多相电机,主要是五相电机;另一种是不对称绕组多三相电机,包括多盘式、多绕组电机等。
普通三相电机的驱动技术已经相对成熟,但是拓展到多相电机的应用时,这些方法的实现仍存在一定难度。文献[2]中,双三相电机的每套绕组在设计时相互独立,具有良好的磁隔离效果,因此可以等效为2台三相电机并联,无需多相逆变器和特殊矢量控制,使用2个三相逆变器,分别采用传统三相矢量控制方法进行驱动,控制简单易行。分组控制方法简化了参数调速过程,有利于实现电机和控制器的一体化应用,对推动多相电机的工业化发展起着重要作用。
文献[3]对模块化永磁轮毂电机进行分组控制,采用多台驱动器分别对单元电机独立控制,当一套单元电机发生故障时,其他单元电机不受影响。文献[4]提出一种整合模块化电动机驱动器(Integrated Modular Motor Drives,IMMD),并联的逆变器为单元电机供电,当一个控制模块发生故障时,其他模块仍可以正常运行,提高了容错能力和可靠性。
针对多台单元电机的协同工作问题,文献[5]采用主从控制结构,主驱动器在速度调节模式下运行,从动器在转矩调节模式下运行,可以实现各个电机的速度协同控制和负载分配。文献[6]提出一种基于模糊控制的双盘电机转矩协同控制策略,实现单绕组运行和双绕组运行2种工作模式,控制模块间采用主从控制,整车控制器通过控制器局域网络(Controller Area Network,CAN)总线,将转矩指令下发到其他控制模块,共同承担电磁转矩,使系统协同运行。这种控制结构要求主从驱动器之间进行高速通讯互联,一旦主控制器发生故障,从控制器将会失控,对通讯系统和主控制器的可靠性要求较高。
为了解决上述问题,本文提出了采用对等控制的双绕组永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)模块化驱动技术,为每套三相电机绕组配备独立的控制器,采用下垂控制方法实现各模块对等控制,无需通讯互连线,完成单元电机的协同控制,实现各绕组输出功率的分配。为了进一步提高转速控制精度,并且提高各单元电机间的功率分配精度,加入二次调节,采用平均转速调节器和平均电流调节器对控制策略进行优化。在对系统结构及控制策略研究的基础上,通过仿真验证了方法的可行性。
1 双绕组电机的矢量控制
1.1 电机控制结构
双绕组永磁同步电机的模块化对等控制系统的结构如图1所示,主要由光伏电池PV、储能电池BAT、逆变器VSI和双绕组电机组成。光伏电池作为发电单元,输出直流电压,经过DC-DC变换器连接到储能单元,共同为子系统的驱动器提供直流电源。双绕组永磁同步电机的定子由2套Y型连接的三相绕组组成,两者在空间上相差一定的电角度,通常,可以是0°或30°或60°,本文所用电机为0°。双绕组电机的2套绕组在设计时相互独立,具有良好的磁隔离效果,每个定子模块都可以看作一套独立的三相绕组,并且各模块共用一套转子,正常工作时,每套电机绕组都可视为一台三相单元电机,采用2台驱动器独立控制,能够单独控制产生恒定转矩。

图1 双绕组电机的模块化对等控制结构Fig.1 Modular peer-to-peer control structure of dual-winding motor
为了实现2台单元电机共同承担功率的目的,两个驱动模块需要并联协同运行。采用对等控制方式,不设置主控制器,2台控制器无主次之分,并且彼此之间无通讯互连线。每台驱动器均工作在转速控制模式,电机侧和驱动器侧为双冗余结构。将主控制器的功能转移到各驱动模块的本地控制器中执行,可以有效避免因单套电机绕组或者单个驱动器故障造成整个系统的失控。为了实现对整个系统的控制,完成三相单元电机的独立控制,如图2所示,解决2台单元电机的并联协同运行问题是研究的关键。

图2 两台驱动器独立控制的双绕组PMSMFig.2 Dual-winding PMSM controlled independently by two drivers
1.2 单元电机的矢量控制

双绕组电机的转矩方程为


(1)
式中:(=1,2)为第台单元电机的电磁转矩;为极对数;和分别为第台单元电机的轴和轴磁链;和分别为第台单元电机的轴和轴电感;为永磁体磁链。
对于隐极电机,存在d、q轴电感值相同的特性,因此可以对转矩方程进行进一步化简,可得
(2)
因此双绕组PMSM的总电磁转矩可以表示为2台单元电机的转矩之和。

(3)
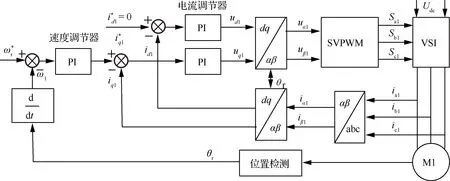
图3 基于id=0 A的单元电机矢量控制框图Fig.3 Block diagram of vector control for a motor unit for id=0 A
2 模块化驱动器的对等控制
2.1 基于下垂控制的对等控制方法
下垂控制常用于交直流微网供电系统中,为保证微网系统稳定运行,内部多种电源共同承担系统功率,各逆变器并联连接对电源进行控制,为了实现即插即用,并联系统采取对等控制方式。当负荷发生变化时,各个电源根据下垂系数不同对功率进行成比例分配,实现对输出功率的准确控制。
在双绕组电机的驱动系统中,采用2个控制器并联的对等控制方式,通过转速下垂控制可以实现各个控制器的协同控制,下垂控制框图如图4所示。
-下垂曲线表达式可以表示为

(4)

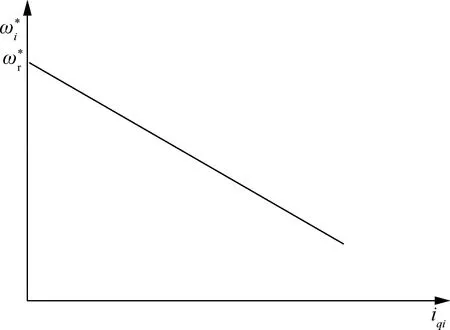
图4 基于下垂控制的功率分配控制框图Fig.4 Block diagram of power sharing control based on droop control scheme
双绕组电机的控制框图如图5所示,采用2个三相控制器分别控制2台单元电机,控制系统包含2个转速外环和4个电流内环,并采用1=2= 0的控制策略。将下垂曲线分别加在本地控制器的转速闭环中,由转速初始指令值减去下垂系数与q轴电流反馈值的乘积,得到新的转速参考值。
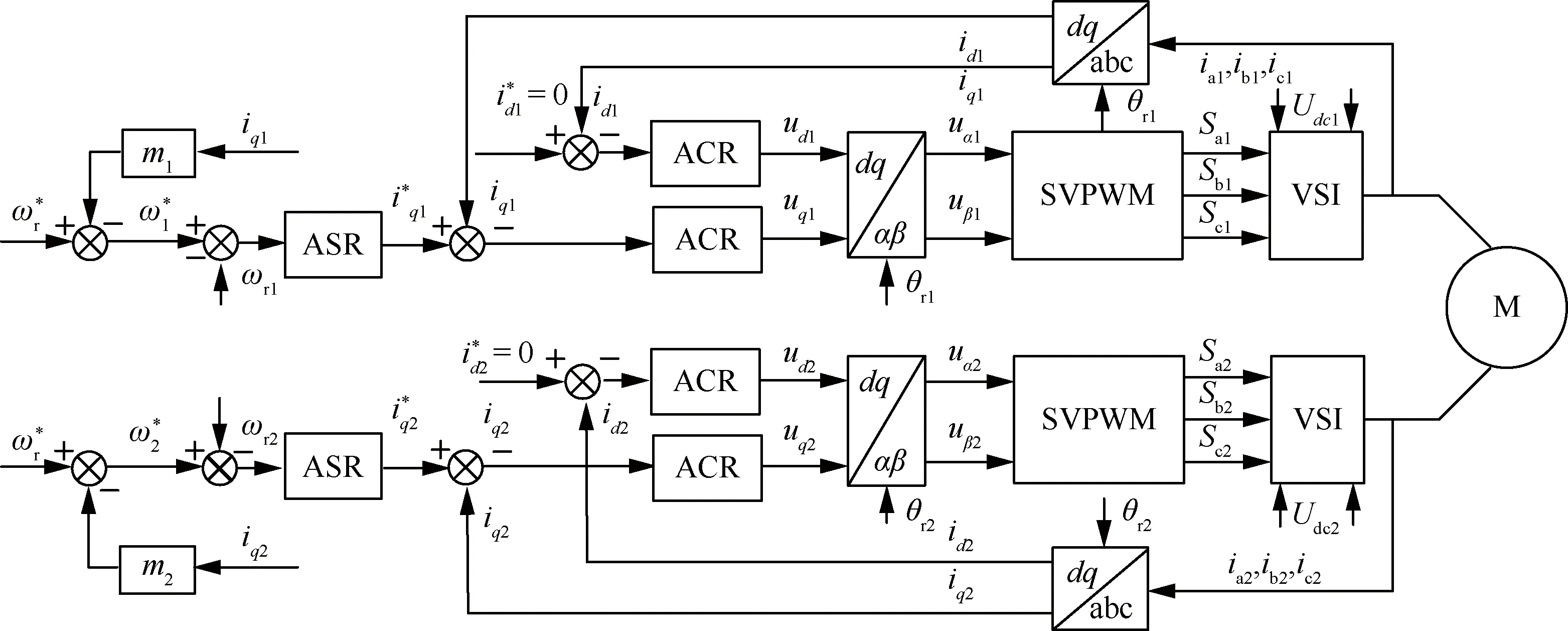
图5 双绕组电机的模块化对等控制框图Fig.5 Block diagram of modular peer control for dual-winding motor
当电机负载发生变化时,电流会相应改变,此时转速参考值变化,经过转速调节器得到的电流指令变化,进入电流调节器重新调节,从而实现2台单元电机输出电流的均等分配,进而实现共同承担负载转矩。
2.2 功率分配原则
在发电、储能和负载电机的一体化系统中,储能电池的能量由光伏和电机的功率差值决定。在实际运行中,很难保证各个光伏组串的光照条件一致,因此光伏发电能力出现差异,会造成某个光伏模块能量不足,而其他模块尚有余力甚至需要弃光,导致子系统能量不均衡,影响储能电池的充放电状态。为了避免这种光伏利用率低的情况,在满足电机正常工作所需的功率后,利用双绕组电机作为功率网关,对于光伏能量吃紧的子系统,减少单元电机的功率消耗,使储能电池有足够的充电能力,相应地增加光伏过剩子系统中单元电机的功率消耗,满足储能电池充电的同时避免了光伏浪费。因此通过对单元电机的功率进行控制,可以实现子系统间功率分配,进而间接实现对储能单元的能量控制。2个子系统之间不是采用电缆的硬性连接,而是通过电机功率网关实现的能量大小和方向均可控的柔性互联。
整个系统的稳定是依靠每个子系统协调配合来完成的,因此可以通过设置每台单元电机承担不同的功率,来实现总功率的分配。第台单元电机的输出功率为
(5)
式中:(=1,2)为第台单元电机的出力比例;为电机总输出功率。
由于双绕组PMSM共用一个转子,因此每个电机绕组的转速相同,功率为
=
(6)
电机输出功率不同体现在电磁转矩不同上。
在基于=0的矢量控制方法中,转矩与q轴电流成正比,因此对每台单元电机的q轴电流进行分配,就可以实现对总功率的分配。则第台单元电机的输出转矩可以表示为
(7)
式中:为转矩系数。
2.3 下垂系数的选取
为了实现双绕组电机稳定运行并且在必要时进行功率分配,下面对下垂系数的取值进行分析,由于2套电机绕组转速相同,因此有
1=2
(8)
定义2台逆变器的功率分配比例为、,有
1∶2=∶
(9)
按照前级光储系统的功率分配要求,由于功率分配比例不同,下垂系数发生改变,此时转速参考值不相等,得到的2台单元电机的电流指令不相等,进而经过电流调节器产生不同的PWM信号,得到不同的电流值。由于轴电流与功率成正比,因此可以改变2台单元电机承担功率的比例,系统达到新的稳定状态。
随着轴电流的增加,会使实际转速与指令值间产生偏差,且差值与下垂系数成线性关系。为了使转速差值不超过系统允许的范围,下垂系数的选取应该满足在转速跌落不超过其允许的最大值Δ,其中max为最大交轴电流。
(10)
下垂系数可以表示为
(11)
由于功率分配比例不是快速变化的,因此无需高速通讯。由负责数据采集、数据管理和系统调度任务的上位机计算每台单元电机的功率分配比例,定时下发给每个控制器,在本地控制器计算自身的电流指令,经过调节,实现系统内的功率分配。表1是功率分配比例变化时子系统的各部分参数,当分配比例为0.5∶0.5时,子系统1的输出功率等于光伏功率,储能电池1的电池功率为0 W,子系统2的输出功率小于光伏功率,储能电池2的充电功率为20 W,储能电池1和2充放电不均衡。当分配比例为0.4∶0.6时,子系统1的输出功率小于光伏功率,储能电池1的充电功率为10 W, 子系统2的输出功率小于光伏功率,储能电池2的充电功率为10 W,储能电池1和2同时充电,光伏利用率较高。当分配比例为0.3∶0.7时,子系统1的输出功率小于光伏功率,储能电池1的充电功率为20 W,子系统2的输出功率等于光伏功率,储能电池2的充电功率为0 W,储能电池1和2充放电不均衡。因此由上位机根据光伏和电池的功率情况,计算功率分配比例,由电机实现不同的功率消耗,光伏功率不仅可以满足输出功率要求,同时为储能电池充电,提高了光伏利用率。

表1 功率分配比例改变时光伏和电池的参数
3 二次调节控制策略
3.1 转速下垂控制的局限性


(12)
根据下垂控制的原理,会引起实际转速低于转速指令值,并且随着负载转矩的增加,转速偏差进一步增加。若下垂系数设置为较小的数值,虽然可以降低转速偏差,但是可能会导致并联逆变器的功率分配响应变慢,精度降低。
为了方便分析,以功率均等分配情况为例,由于2台单元电机的电流可能不完全相同,两者的的转速下垂曲线并不完全重合,如图6所示。当两者均分负载的情况下,如果下垂系数的选取值较小,则实际转速和转速初始指令的偏差越小,但是电流分配的误差越大。如果下垂系数的选取值较大,电流分配的误差越小,但是转速偏差进一步增大。因此仅通过下垂系数的选取无法调和转速偏差和功率分配精度的矛盾,需要做进一步研究。
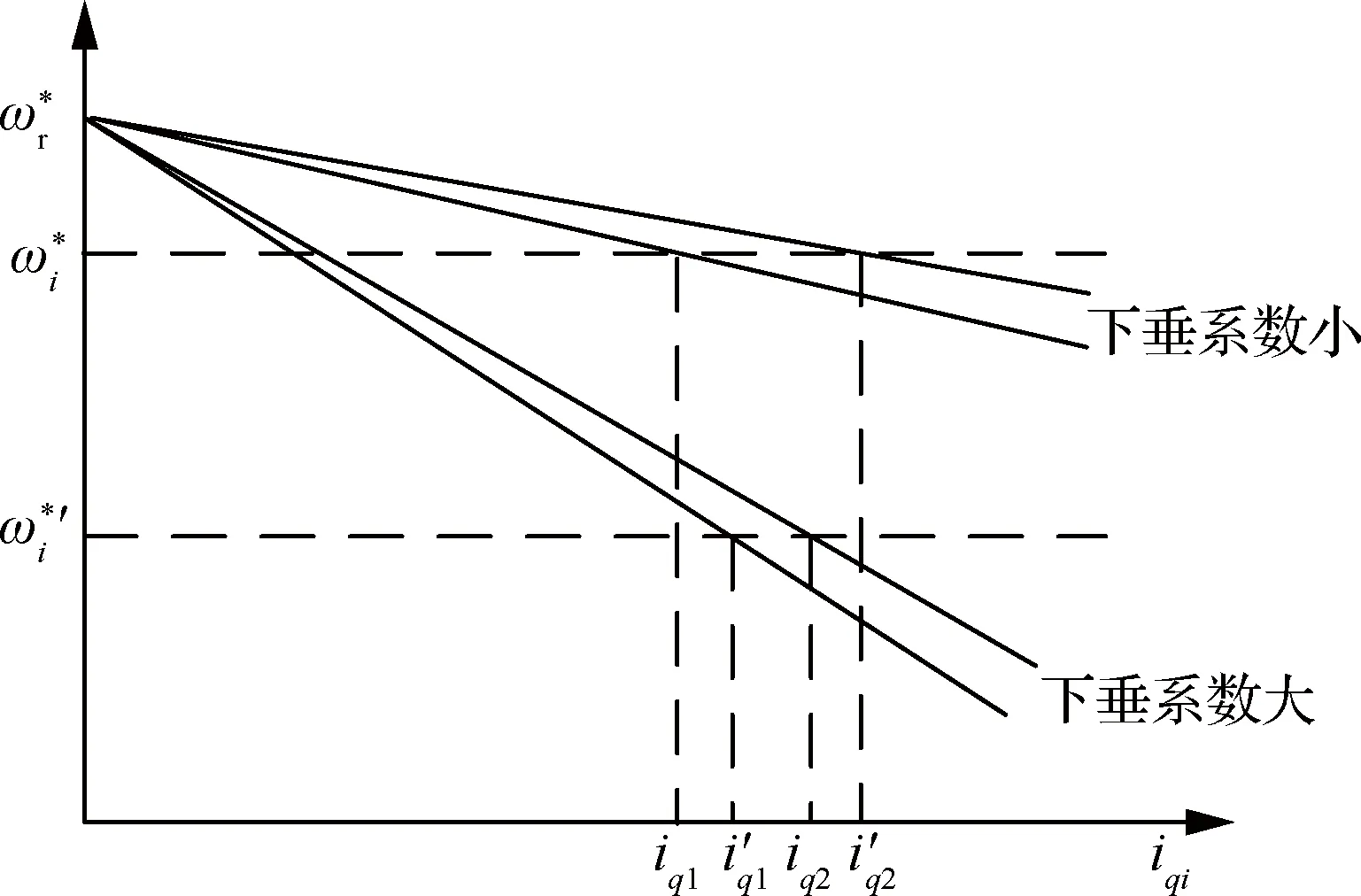
图6 下垂系数对功率分配的影响Fig.6 Impact of droop coefficient on power sharing performance
同时2个控制器均工作在转速控制状态,双转速环需要协同控制,但是分别采用无位置方法辨识的转子位置和转速可能不会完全一致,一旦转速反馈值相差太大,导致功率分配精度下降。
同样以功率均等分配情况为例,在同样的下垂曲线下,2台单元电机的电流应该接近相等的情况。如果转速反馈值1与2相差很大,会导致电机1的电流和电机2的电流出现较大偏差,如图7所示,影响控制结果。

图7 转速反馈值差异对功率分配的影响Fig.7 Impact of speed feedback value difference on power sharing performance
3.2 二次调节控制策略
加入二次调节的系统控制框图如图8所示,每个控制器模块都采用转速下垂控制作为一次控制,实现2台单元电机的功率分配。由上位机采集实际转速值和电流值,再通过低速通讯网络发送给各个控制器,进行平均转速和平均电流的计算,用来执行二次控制。平均转速调节器和平均电流调节器分别在本地控制器中实现,均采用PI调节器,经过闭环控制产生二次调节信号,送给下垂控制曲线进行补偿。低速的通讯方式降低了通讯网络中数据传输的数量,假设采样频率为,如果每个控制周期都需要数据传输,则需要高速通讯的频率为。而低速通讯频率可以为/,即每个控制周期进行一次数据传输,降低通讯网络中数据传输的压力。
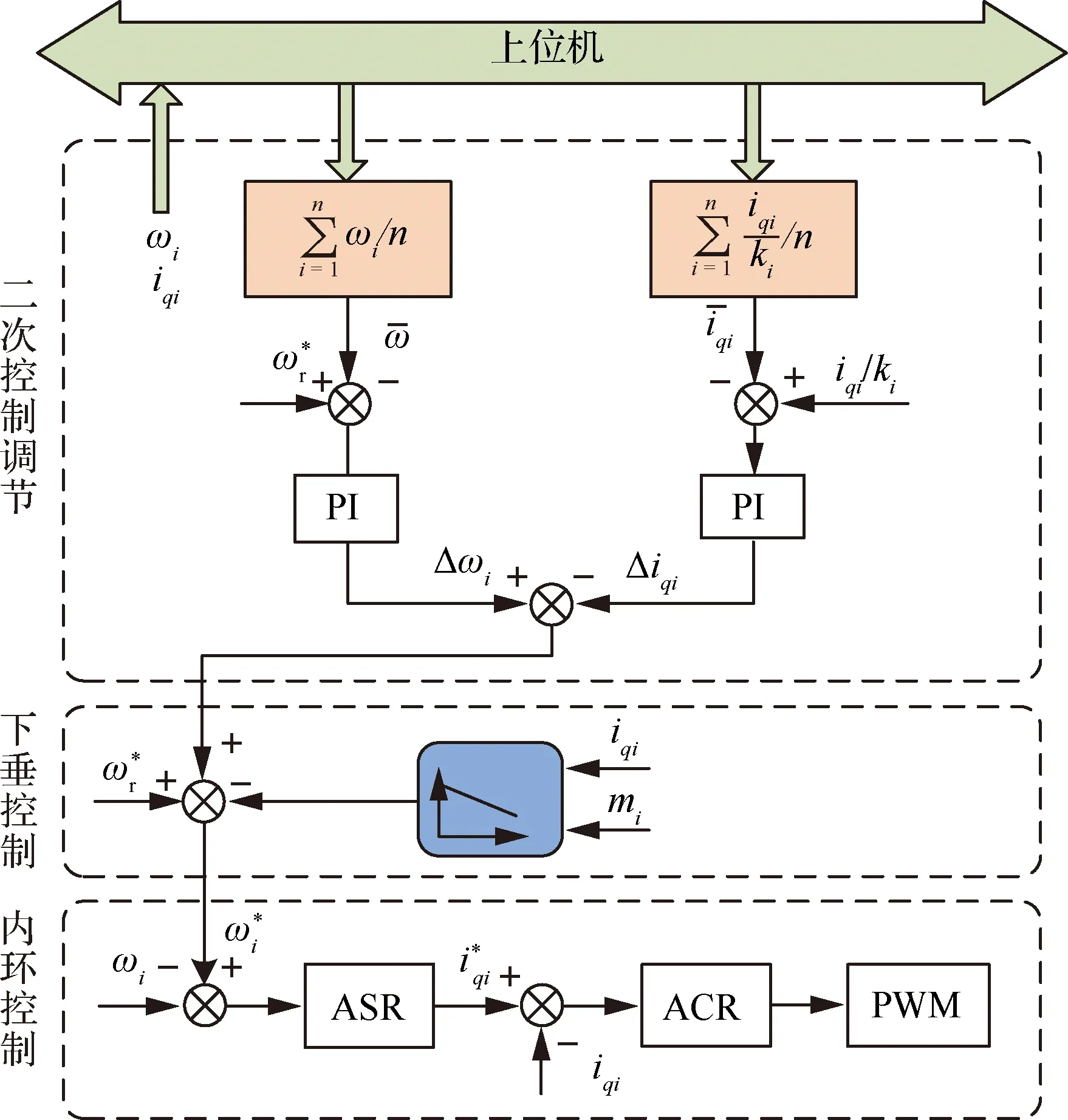
图8 加入二次调节的控制框图Fig.8 Control block diagram of secondary regulation
经过下垂控制和二次调节后,新的转速指令的表达式为

(13)


(14)
其中:为通讯延迟。
上述二次调节方法,相当于在下垂控制的基础上对转速和电流进行补偿,效果对比如图9所示,可以看出,加入补偿项后的下垂曲线和之前相比进行了平移操作,转速跌落值减小,功率分配精度也相应提高。
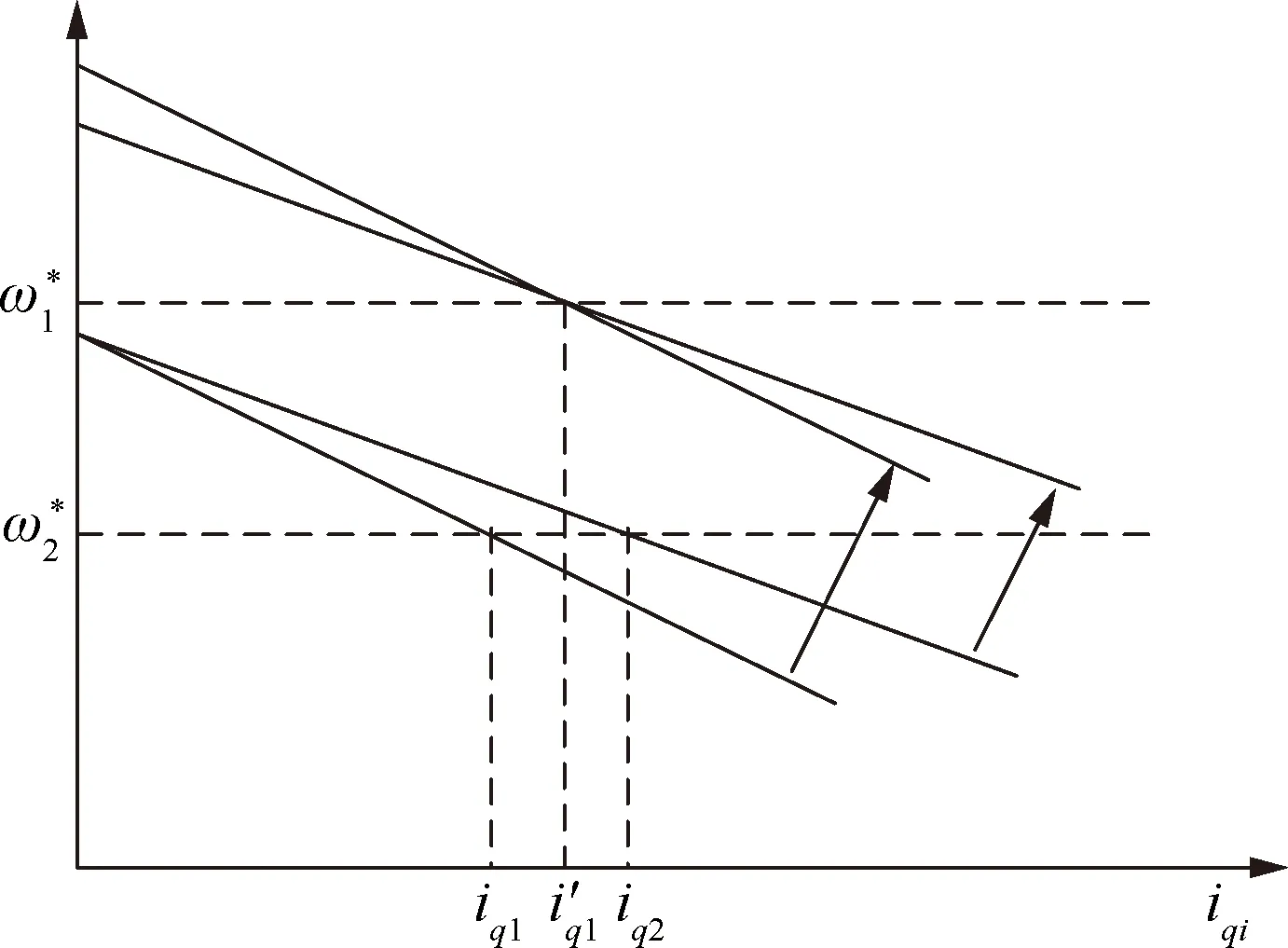
图9 加入二次调节对转速和功率分配的影响Fig.9 Effect of secondary regulation on speed and power sharing performance
3.3 系统稳定性分析
二次调节方法对下垂控制进行了补偿,为了分析所提方法对控制系统稳定性的影响,下面对下垂控制和二次调节进行数学建模,并进行稳定性分析,控制框图如图10所示。
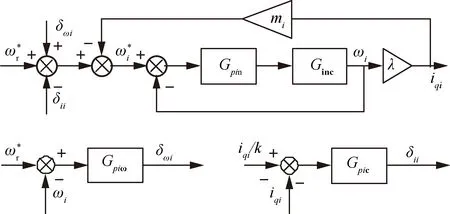
图10 用于系统稳定性分析的控制框图Fig.10 Control diagram for stability analysis
由电机机械方程和电机的速度关系可归纳出
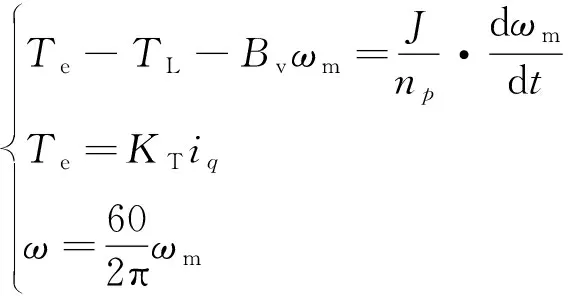
(15)
式中:为电磁转矩;负载转矩;为阻尼系数;为机械角速度;为转动惯量;为极对数;为转矩系数。
当下垂调节比较慢时,可以忽略微分环节的影响,因此可得
(16)
(17)

本地转速环和电流环可表示为

(18)

(19)


(20)
通过式(17)~式(19)计算,得到
(21)
式中:




根据式(21)所示的模型,利用MATLAB进行求解。以控制器1为例,闭环系统的稳定性可以通过对系统主导极点的位置来进行分析。
图11显示了下垂系数的变化对系统稳定性的影响,可以看到在下垂系数的变化范围内,所有主导极点位于左半平面,系统保持稳定。随着下垂系数的增大,主导极点逐渐向虚轴靠近,系统的稳定性降低。
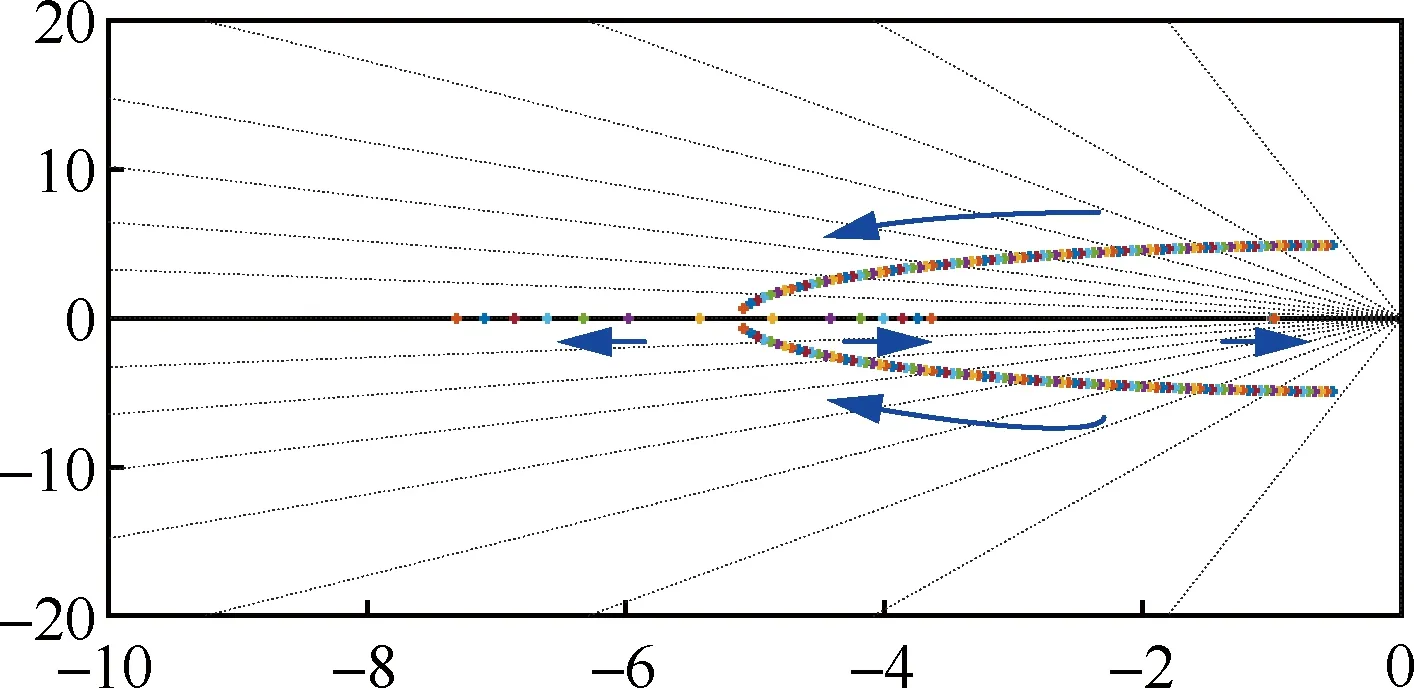
图11 不同下垂系数时系统主导极点的分布Fig.11 System’s dominant poles for different droop proportion
4 仿真验证
为了验证对等控制策略的可行性,利用MATLAB/Simulink对双绕组电机进行了仿真。系统参数如表2所示。
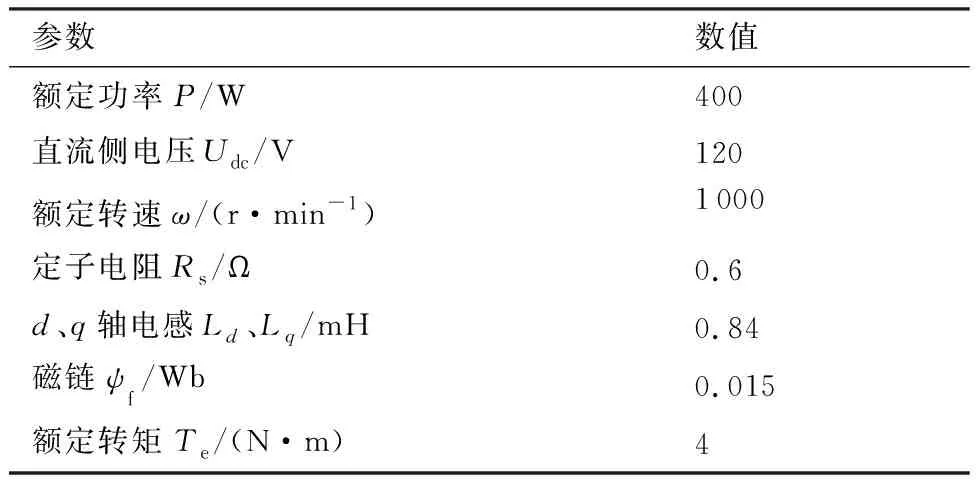
表2 电机参数Table 2 Motor parameters
图12(a)和图12(b)分别显示了下垂系数=取50,10,1,0.1时的转矩和转速波形,可以看出,在一定范围内,随着下垂系数增大,转矩波形超调减小,系统控制性能较好。但是下垂系数过大时,转矩波动幅度较大,并且转速跌落过大,严重偏离转速初始指令值。因此,综合考虑下垂系数取1。
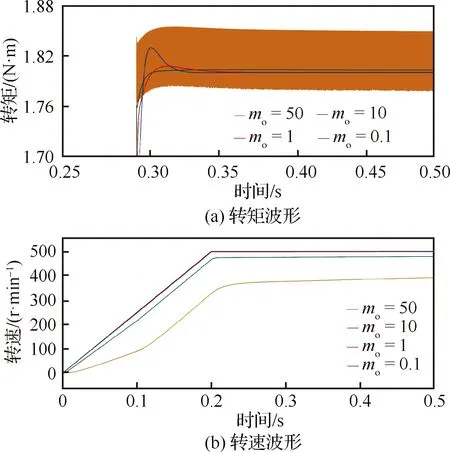
图12 不同下垂系数下的系统控制性能Fig.12 System control performance for different droop coefficients
利用单元电机进行系统间功率分配的前提是保证双绕组电机稳定运行,因此当负载为额定值时,采用0.5∶0.5的分配比例,2台单元电机均分负载,工作在相同工况。当双绕组电机稳定运行且带载较小时,才考虑利用单元电机进行系统间功率分配。
为了验证2台单元电机的功率分配协同控制作用,在不同的时间段设置不同的功率分配比例,仿真设置参数如表3所示。
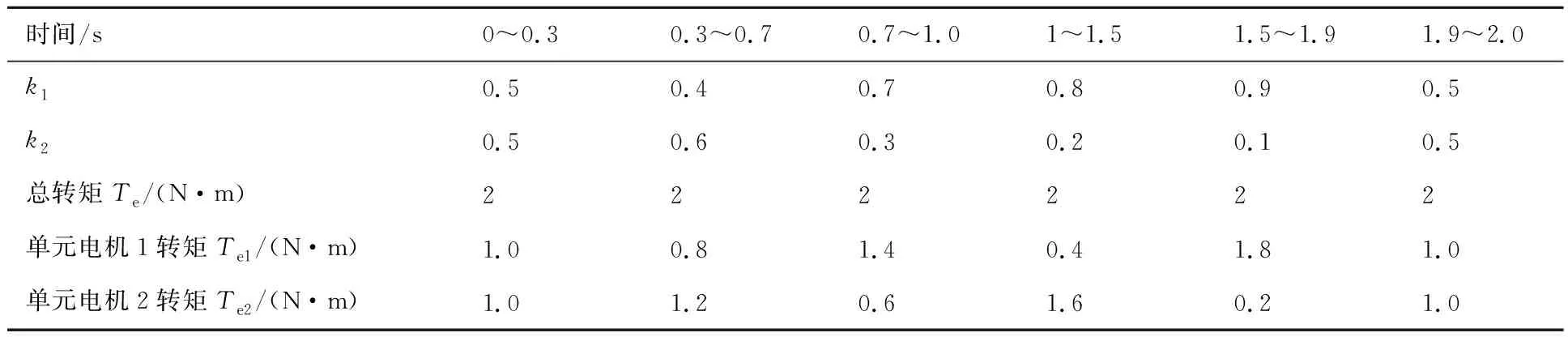
表3 仿真设置参数Table 3 Simulation setting parameters
图13(a)分别为双绕组PMSM总转矩和每台单元电机转矩的波形,可以看出单元电机1和2分别按照功率分配比例对总转矩进行分配。图13(b)为电流瞬间变化波形,2台单元电机从均分功率到按0.4∶0.6的比例分配,可以看出,当功率分配比例增加或者减少时,每台单元电机均能较快跟随指令进行调节,并且稳态精度较高。

图13 功率分配状态下的转矩波形Fig.13 Torque waveform in power sharing state
图14(a)表示的是双绕组电机从起动到额定转速的转速波形,仿真条件设置为转速指令为1 000 r/min, 总转矩指令为4 N·m, 可以看到两台单元电机的实际转速值均能跟随转速下垂后的指令值,控制精度较高。图14(b)为经过放大的波形,可以看到经过下垂曲线的转速指令与转速初始指令值之间存在9 r/min的转速偏差,与理论分析一致。
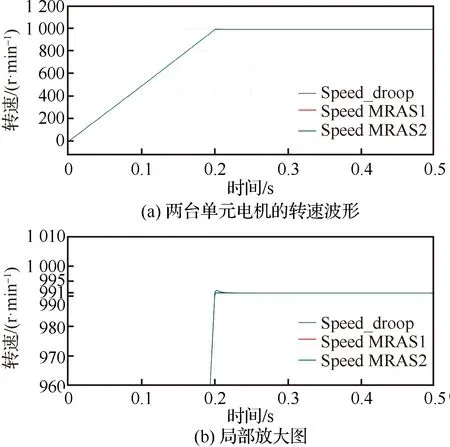
图14 加入下垂控制的转速波形Fig.14 Speed waveform after adding droop control
加入二次调节后进行仿真验证,图15(a)和图15(b)分别为双绕组PMSM在加入平均转速调节器前后的仿真结果对比,仿真条件设置为转速指令为500 r/min,总转矩指令为4 N·m, 平均转速调节器的采样频率为/10。可以看出,加入平均转速调节器后,实际转速与转速初始指令的偏差相对减小,降低了由下垂控制造成的转速偏差的影响。
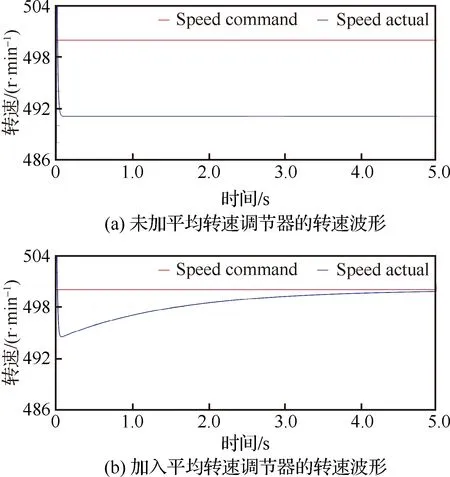
图15 平均转速调节器作用的对比结果Fig.15 Comparison of effects of average speed regulator
为了验证平均电流调节器的作用,仿真设置条件为2套控制器分别估算的转速反馈值存在10 r/min的差值,功率分配比例设置见表4。
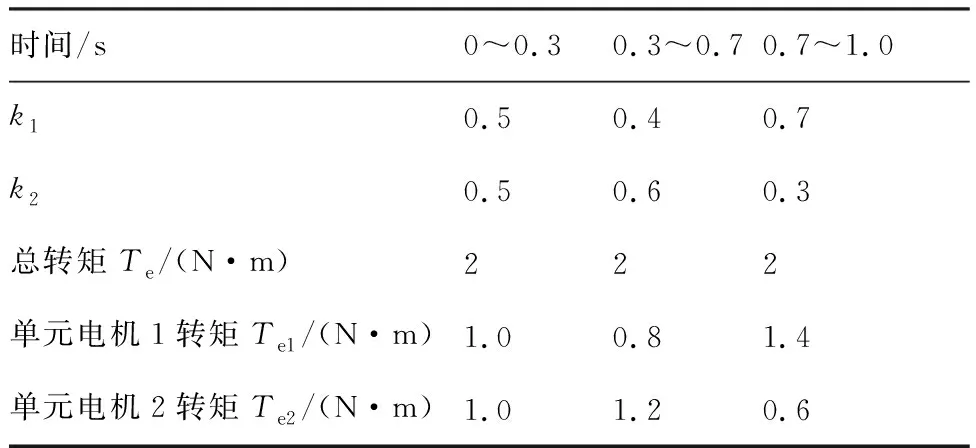
表4 功率分配比例设置条件Table 4 Output power proportion setting conditions
图16分别为双绕组PMSM在加入平均电流调节器前后的仿真结果对比,可以看到,当转速反馈值存在较大差异时,在未加平均电流调节器的控制结果中,2台单元电机的转矩已经不能按照功率分配比例进行分配。加入平均电流调节器后,分配精度大大提高,解决了由转速反馈值差异造成的转矩分配精度降低的问题。
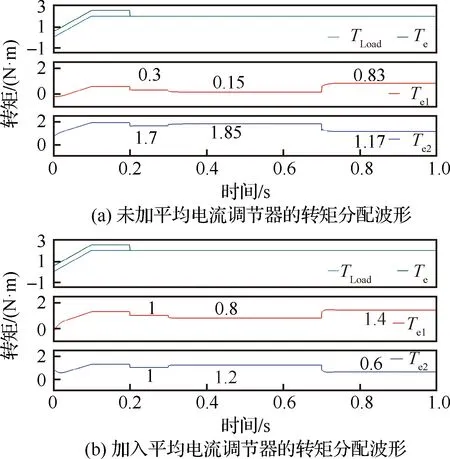
图16 平均电流调节器作用的对比结果Fig.16 Comparison of effects of average current regulator
为了验证负载变化时2台单元电机的功率分配协同控制作用,在不同的时间段设置不同负载和功率分配比例,仿真设置参数如表5所示。

表5 仿真设置参数Table 5 Simulation setting parameters
图17为双绕组PMSM在负载变化时的仿真波形,当负载转矩发生变化时,2台单元电机仍可快速按照功率分配比例对总转矩进行分配,动态和稳态性能良好。
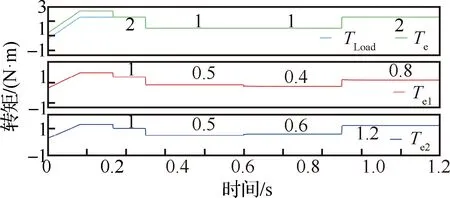
图17 负载变化时的转矩波形Fig.17 Torque waveform when the load changes
5 实验验证
用于验证控制方法有效性的实验平台如图18所示,系统的基本结构主要包括:dSPACE DS1103半实物仿真控制器的软件和硬件部分,主电路,由驱动电路、采样电路和保护电路组成的控制电路,以及由双绕组PMSM和三相PMSM组成的电机对拖装置,双绕组PMSM的参数如表2所示。平台实物图如图19所示。
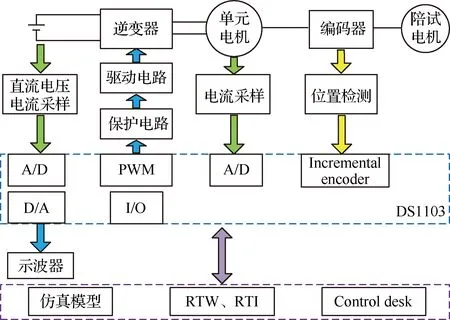
图18 基于dSPACE的实验平台硬件结构图Fig.18 Diagram of experimental platform hardware structure based on dSPACE
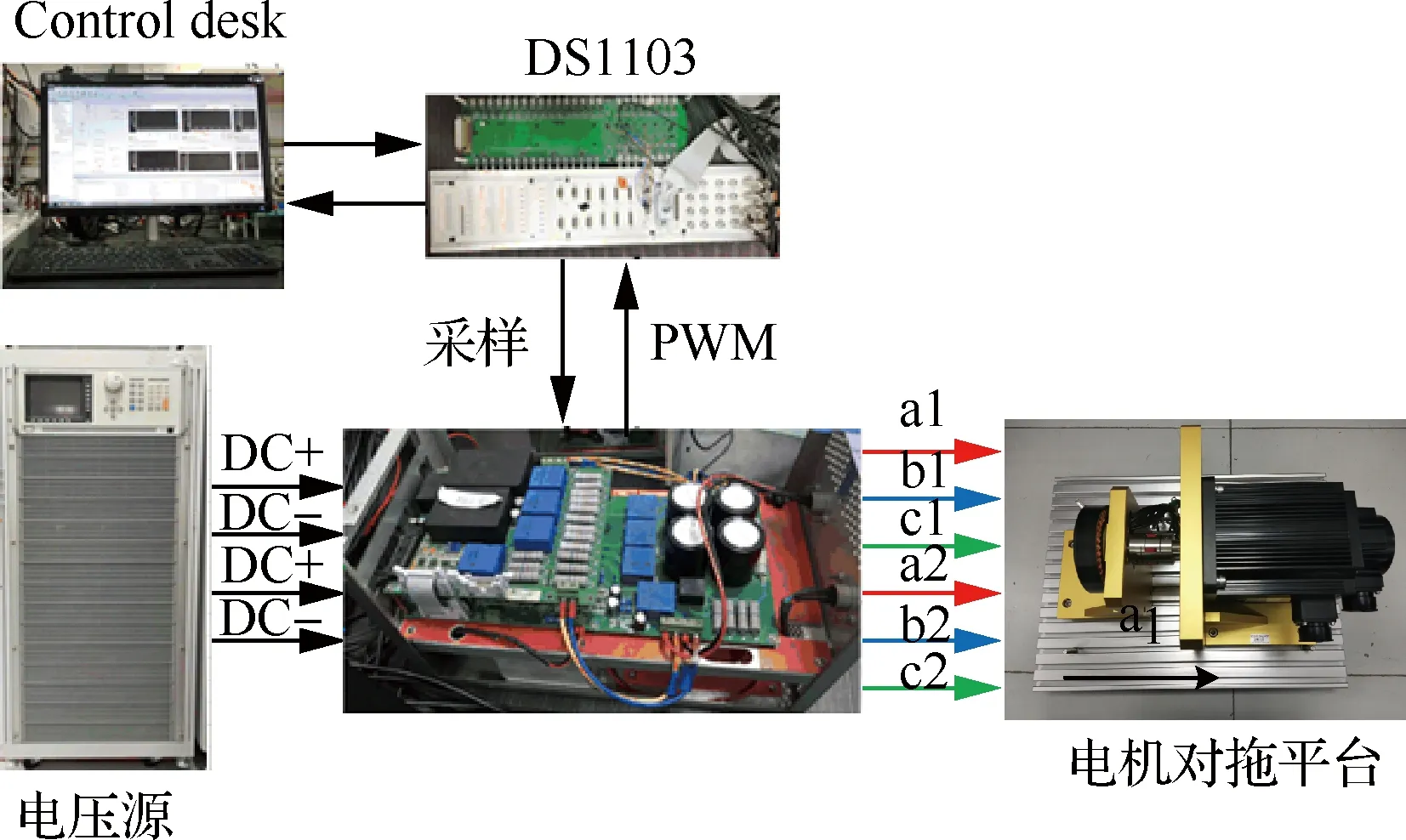
图19 电机实验平台Fig.19 Motor experiment platform
dSPACE的软件环境包括实时接口RTI(Real-Time Interface)和上位机Control Desk两部分,RTI用来连接dSPACE硬件和MATLAB/Simulink软件,通过RTW(Real-Time Workshop)将仿真程序转换为实时代码,并自动下载到硬件系统中,控制流程如图20所示。ControlDesk提供实验和测试环境,用于指令的下发、在线参数调整和对变量进行实时监控。由于dSPACE可以方便的将仿真模型转换为控制程序,无需编写代码,有利于控制策略的验证,以及方案优化。

图20 dSPACE与MATLAB/Similink连接流程图Fig.20 Connection flowchart of dSPACE and MATLAB/Similink
DS1103使用PPC(Power PC)控制器板,浮点运算模式,速度为400 MHz;包含20路A/D通道,采样时间为2 μs,可输入-10~+10V的电压;8路D/A通道,可输出-10~+10V的电压;数字I/O模块,输入输出电压为TTL电平,最大输出电流为5 mA;6路增量编码器接口,用于接收脉冲信号,最大输入频率为1.65 MHz;配备三相PWM输出,外加4路单PWM输出,满足两台驱动器的控制需求。
控制电路与DS1103控制器的输入输出接口的关系如图21所示,采样电路对每台单元电机的相电流,直流侧电压、电流进行采样,输入DS1103的ADC端口之后,经过放大和直流偏置修正,得到实际的电压、电流信号值。对于2台驱动器,DS1103通过2组控制程序分别产生三路PWM信号,设置起动和故障信号产生软件保护信号,通过I/O端口输出,与PWM信号一起经过逻辑和驱动电路生成PWM驱动信号,驱动智能功率模块IPM,进而控制逆变器的输出电流,实现两台单元电机的控制。

图21 DS1103的接口配置Fig.21 Interface configuration of DS1103
在实验平台上进行双绕组电机的模块化对等控制实验,图22为双绕组电机带额定负载4 N·m时的实验结果,图中分别表示两台单元电机的轴电流、,和A相电流、。可以看出,2台单元电机均分负载转矩,q轴电流相同,定子电流的幅值相同,相位差为0。
为了验证双绕组电机的功率分配控制策略,设置不同的出力指数。利用各单元电机进行系统间功率分配的前提是保证双绕组电机正常工作,只有当双绕组电机稳定运行且带载较小时,才考虑利用各单元电机进行功率分配。因此进行功率分配实验验证时,转速指令值设置为500 r/min,转矩为2.2 N·m,2台单元电机的q轴电流预期值如表6所示。
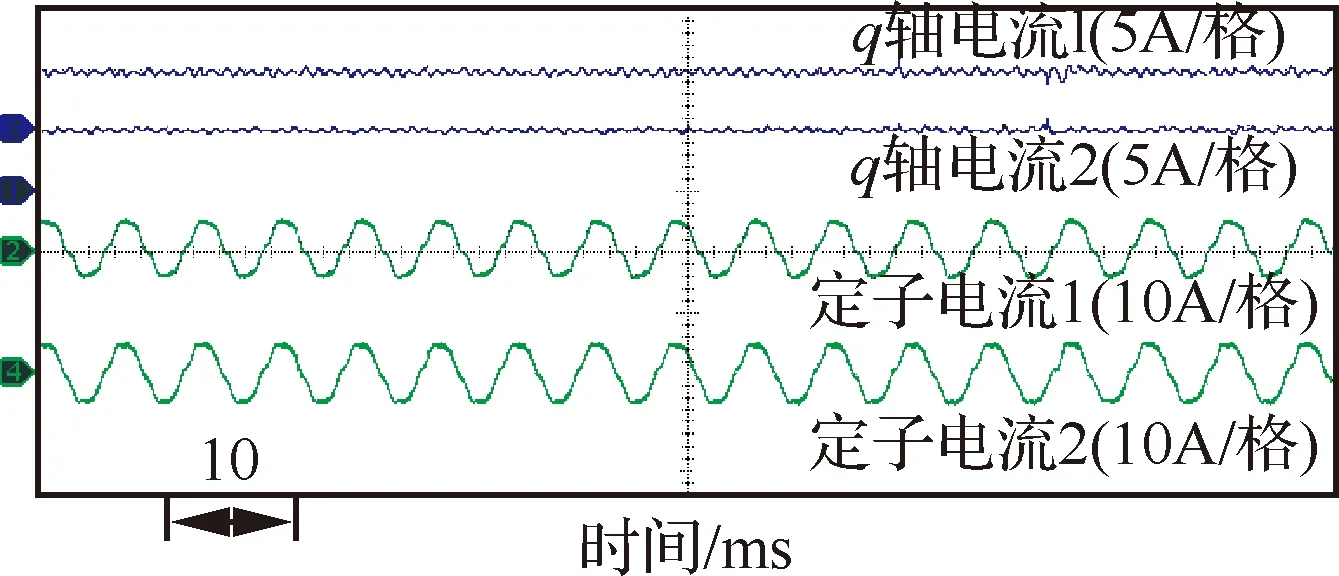
图22 双绕组电机带额定负载实验波形Fig.22 Experimental waveform of dual-winding motor with rated load
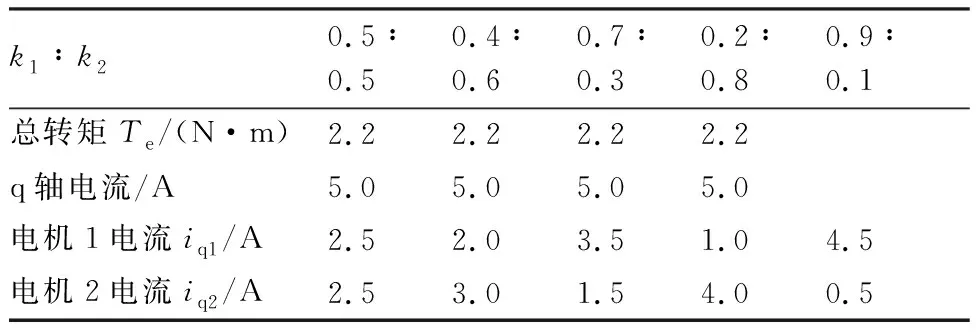
表6 实验设置条件Table 6 Experimental setting conditions
图23(a)~图23(e)分别为双绕组电机在不同出力指数下得到的实验结果,图中波形分别为两台单元电机的q轴电流、,和A相电流、。可以看出单元电机1和电机2分别按照出力指数对轴总电流进行分配,与预期值相符。定子电流的变化与轴电流分配情况一致,验证了控制策略的正确性。

图23 功率分配状态下的电流实验波形Fig.23 Current experiment waveform in the case of power sharing
6 结 论
通过对双绕组永磁同步电机的模块化对等控制策略进行详细研究,实现了电机的转速调节和功率分配。
1) 对于安全可靠性要求较高的场合,具有冗余容错结构的双绕组电机是必要而且是可行的。采用对等控制的模块化驱动器进行多相电机调速可以进一步提高可靠性。
2) 采用转速下垂控制实现2个单元电机的并联协同运行,同时实现不同电机绕组的功率调节,对于光伏系统或电池系统供电而言,可以实现均衡控制。
3) 利用转速二次调节可以补偿下垂控制造成的转速偏差,提高系统的功率分配精度。
