一种新型多功能智能鞋柜设计与实现
2022-09-06隋秀梅方振龙于济群王姗珊
刘 宁 隋秀梅 方振龙 于济群 王姗珊
(长春职业技术学院,吉林 长春 130022)
伴随社会进步和人们收入增加,传统鞋柜已经满足不了中高收入家庭对放鞋空间的需求。此外,根据艾瑞报告,一般三口家庭至少拥有30~50双鞋子的总量。鞋子存放和环保等问题越来越受到人们的关注。智能鞋柜是“自动智能健康式”的便利式家居产品,以原木材料为主,通过齿轮齿条、丝杠以及剪叉机构等多种传动装置来确保其功能的顺利实现,解决了拿放不方便、功能单一的问题。另外,添加清洁、保养的侧柜可实现对鞋子四周刷油等功能,大大提高了鞋柜的功能。薛兴虎等[1]基于空间利用低和除臭效率低等问题设计了一种插挂式智能鞋柜;卜许辉等[2]基于物联网技术快速发展设计了一种利用臭氧除臭、烘干除湿防霉、自动放鞋取鞋的智能鞋柜;李灿霞等[3]利用电子信息技术以及自适应控制技术设计了一种可实现自动识别烘干、自动传输的智能鞋柜。
目前市面上女士鞋柜存在功能单一、占用空间、使用体验效果不佳且易产生二次污染等问题,针对已有产品的缺陷进行改进,提出了一种新式多功能智能鞋柜,该产品主要由自动拿放主柜、侧柜和剪叉升降机构组成,传动方式采用齿轮齿条、液压杆和丝杠传动[4]。该产品以功能需求为导向,大大提高了空间的利用率,更方便了人们的居家生活,同时该设计为同类家具的研究提供了借鉴。
1 产品整体设计参数和原理
1.1 整体结构参数
该多功能智能鞋柜整体尺寸为(2.1×0.8×2.6)m,主柜尺寸为(1.5×0.8×2.6)m,如图1(a、b)所示,内设自动换层托盘,主要负责对鞋子进行换层与拿放。自动换层托盘上下连接丝杠,前后连接齿轮齿条,通过电机带动丝杠与齿轮齿条分别实现托板的竖直与水平运动,接着托板带动水平载鞋板进行竖直水平运动,以此来实现鞋子的换层与拿放[5]。右边侧柜的高为(0.6×0.6×0.8)m,其主要是用来对鞋子进行除尘、干燥、 刷油以及灭菌,内有剪叉机构对鞋子进行升降便于毛刷对鞋子进行护理刷油,剪叉机构底部连接液压杆。载鞋板的升降是利用光杠、丝杠和导轨配合完成,鞋子先由固定机构限位,经过侧柜处理后,再由自动换层机构对已经清洁的鞋子完成换层和拿放。光杠上有一条长槽,允许带有键的齿轮左右移动,并能由光杠的转动带动齿轮一起转动,光杠起导向作用,传动靠电机带动丝杠来完成。
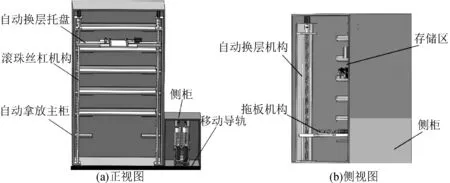
图1 多功能智能鞋柜示意图
1.2 工作原理
自动拿放主柜主要负责对鞋子进行自动存放,运用丝杠传动实现托板的上下移动;丝杠与托板相连接,经电机带动丝杠传动来实现托板的竖直方向运动,通过齿轮齿条传动实现托板的水平移动;齿轮齿条与托板固定,通过电机带动齿轮齿条来实现托板的前后运动,接着托板再托运载鞋板来实现鞋子的上下与前后运动[6]。两个运动机构相互配合实现多层柜的换层,方便鞋子的拿放;另外,在自动拿放主柜的内侧增加紫外线杀毒装置,可以对鞋子进行消菌杀毒;侧柜通过运用齿轮齿条传动对鞋子进行固定,通过运用电机来实现毛刷的运动对鞋子进行除尘与刷油,通过运用剪叉升降机构和液压杆传动机构来实现鞋子的升降。此外,清洁保养侧柜内侧增加干燥灯对鞋子进行干燥[7]。
2 核心部件设计
2.1 自主拿放主柜设计
自动拿放主柜由丝杠传动实现托板在竖直方向的移动,通过齿轮齿条传动实现托板在水平方向的移动,两个运动机构相互配合实现多层柜的换层,方便鞋子的拿放,如图2(a)所示。自动换层托盘上下连接丝杠,前后连接齿轮齿条,通过电机带动丝杠与齿轮齿条分别实现托板的竖直与水平运动,接着托板带动水平载鞋板进行竖直水平运动,以此来实现鞋子的换层与拿放,如图2(b)所示。
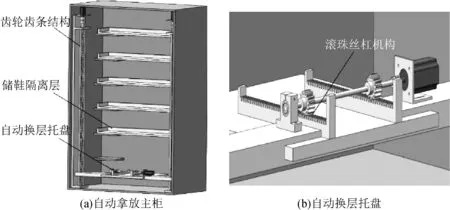
图2 载鞋板水平移动机构示意图
2.2 侧柜设计
侧柜主要有纵向清洁(上油)机构、水平清洁机构和剪叉式升降机构组成,侧柜结构如图3所示。
载鞋板链接纵向清洁机构和水平清洁机构,其中纵向清洁机构由刷鞋筒支撑装置、限位模块、上油毛刷组成,如图4(a、b)所示。鞋子通过固定机构和齿轮齿条传动机构,齿轮齿条起到限位作用,以防止鞋子在刷油过程中发生侧移动。通过滚珠丝杠结构实现纵向刷鞋筒的前后运动来对鞋子的前表面进行护理,经过剪叉、齿轮齿条和滚珠丝杠等结构实现自动刷油的功能。
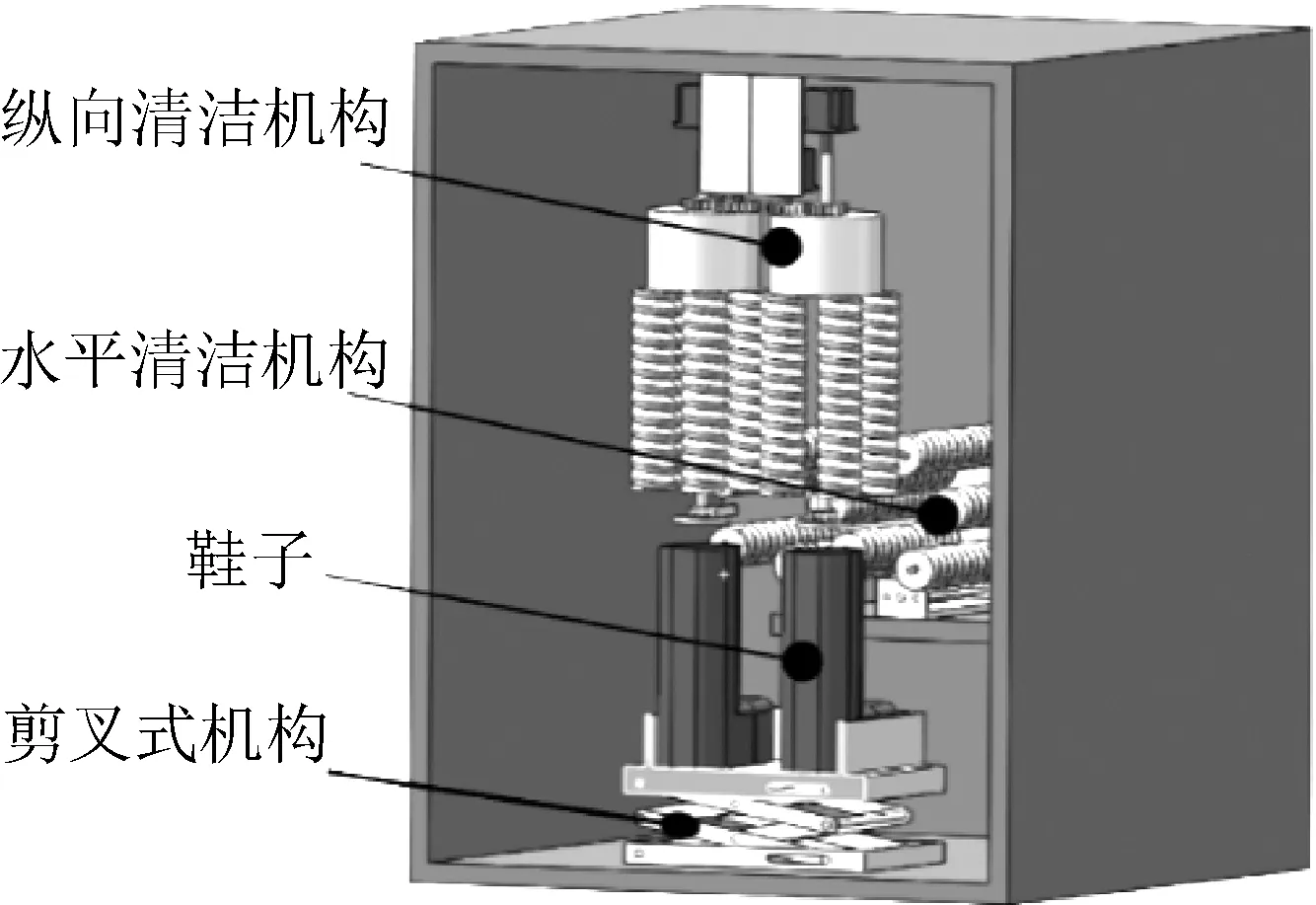
图3 侧柜示意图

图4 载鞋板纵向装置示意图
横向清洁机构主要由滚珠丝杠机构和刷鞋筒机构组成,载鞋板的水平移动由齿轮齿条传动机构来实现(如图5所示),齿条运用机械连接方法与托板连接在一起,与之配合的齿轮通过电机的驱动来带动板运动,托板再托运载鞋板运动,从而完成载鞋板水平移动,通过电机带动液压杆,液压杆再带动剪叉机构来实现剪叉机构的运动,使鞋子与毛刷相互接触并相互作用来实现对鞋子的清洁[8]。最后由齿轮齿条结构实现对鞋子的固定以及纵向刷鞋筒对鞋子进行清洁防护。
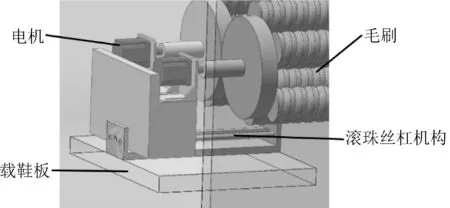
图5 载鞋板横向装置示意图
2.3 传动机构设计
剪叉式机构(又称剪式铰、剪刀撑)是一类具有鲜明特色的可伸展机构,具有良好的可折叠性和空间伸展性,还具有运动单元模块化、结构简单、成本低廉等特点[9]。因此,在侧柜使用剪叉机构(如图6)实现对鞋子的升降功能。
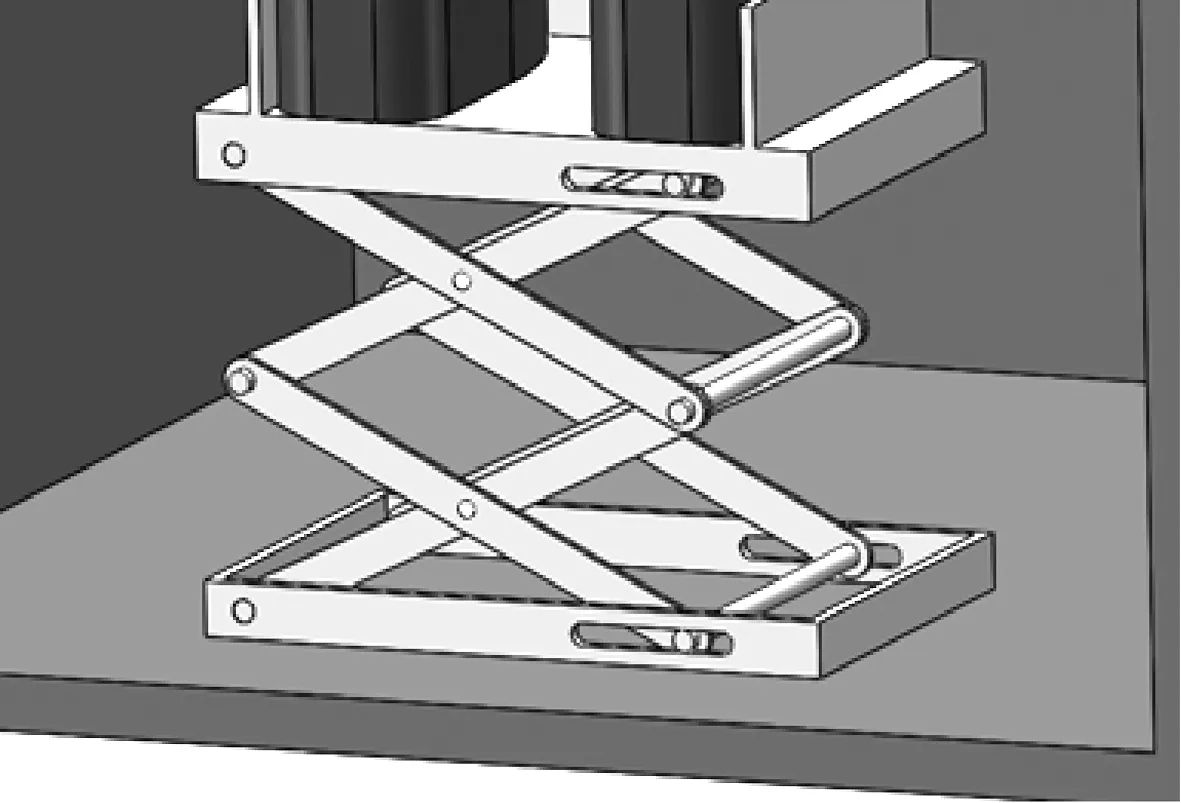
图6 剪叉机构示意图
2.4 液压杆传动设计
电动液压推杆适用于需要复推、拉直线(或往复旋转一定角度)的运动,并且具有超负荷保护能力,不会损坏电机和机件[10]。同一台电液推杆其推、拉力可无线调速,因而驱动力范围广。因此我们采用液压杆(如图7)传动来带动剪叉机构的运动。
3 电机选型
3.1 齿轮驱动电机
齿轮齿条驱动电机负责带动与托板相固定的齿轮齿条,齿轮齿条带动托板进行前后运动,托板再托起载鞋板。每个载鞋板的质量约为 5 kg,其所能容纳鞋子的数量在6双左右,其总质量大约为10 kg,托板质量1 kg ,运动速度为0.1 m/s,电机负载F=156.8 N,轴向负载为833 N,传动效率η=0.866。
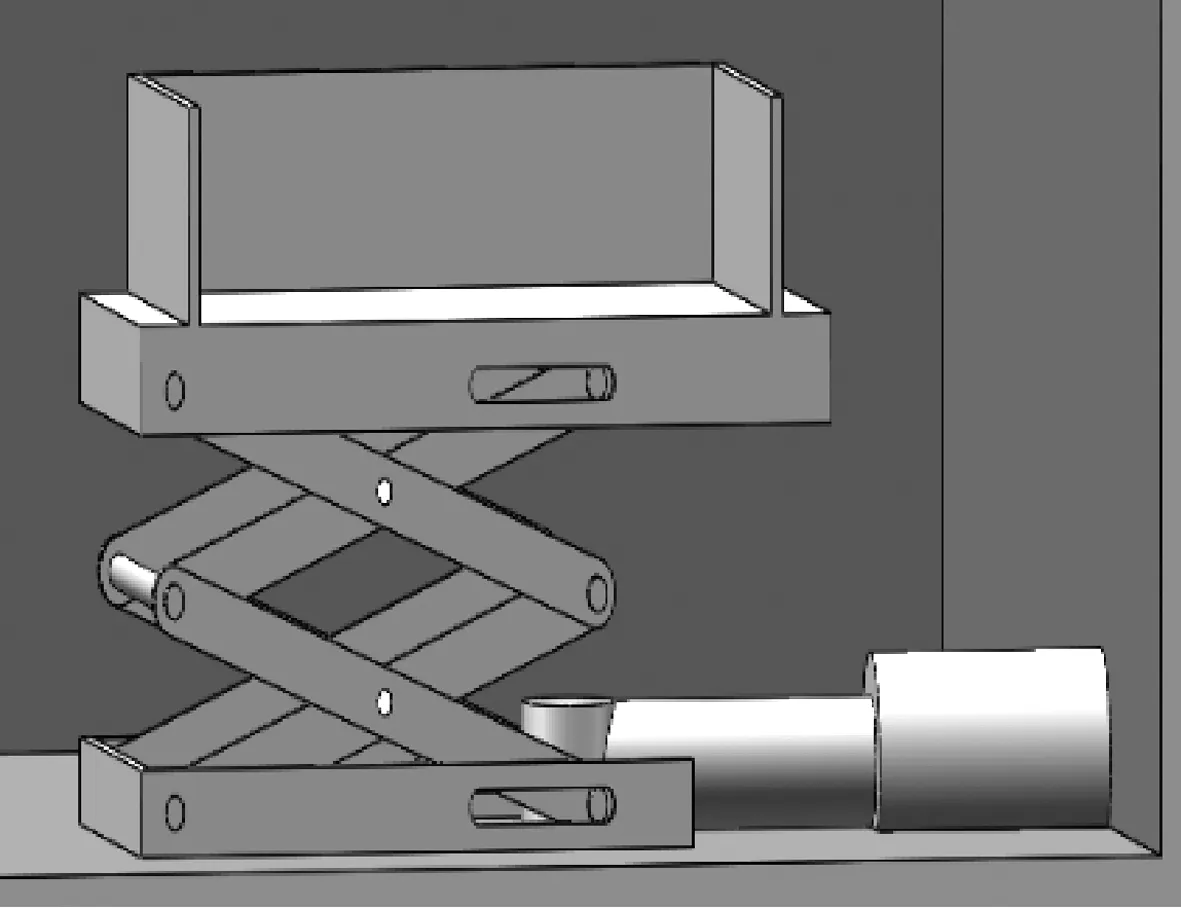
图7 液压杆示意图
电机输出功率:
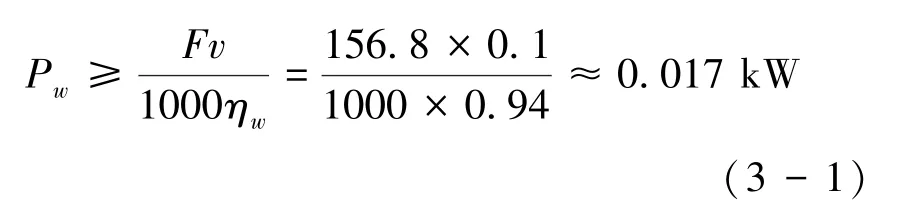
所需电机功率:

轴的扭矩:

电机转速的计算:

因此,齿轮驱动电机选型为HY-100a。
3.2 丝杠驱动电机
丝杠驱动电机负责带动与托板相连接的丝杠,丝杠带动托板进行竖直方向运动,托板再托运载鞋板进行竖直方向运动。取速度为0.1 m/s,考虑阻力使载荷阻力增大10%,传动效率η=0.877。
电机输出功率:

所需电机功率:

电机转速的计算:

因此,丝杠驱动电机选型为Y90S-6。
3.3 剪叉机构驱动电机
设剪叉机构以及鞋子的总质量为10 kg ,剪叉机构的移动速度v=0.1m/s,传动总效率η=0.877,考虑其所受运动阻力。
电机输出功率:
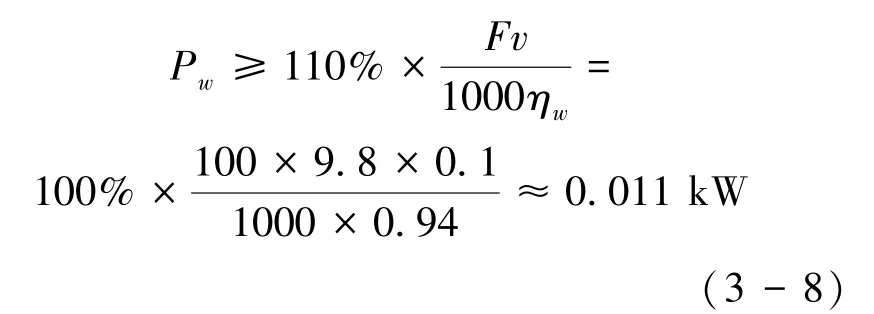
所需电机功率:

电机转速的计算:
因此,剪叉机构驱动电机选型为HY-100a。
4 关键部位有限元分析
4.1 托板应力分析
对托板进行有限元分析,其中托板总变形云图如图8(a)所示,最大变形量为0.020082 mm,如图8(b)所示,可知满足设计要求。
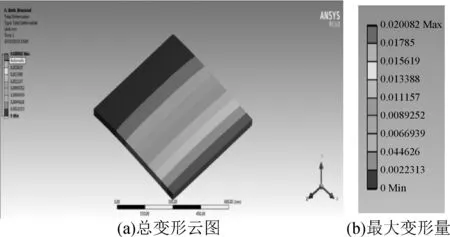
图8 托板水平移动处的支撑短轴有限元分析结果示意图
4.2 托板水平移动处的支撑短轴应力分析
对托板水平移动处的支撑短轴进行有限元分析,其中托板水平移动处的支撑短轴总变形云图如图9(a)所示,最大变形量为0.19503 mm,如图9(b)所示,故满足设计要求。

图9 托板水平移动处的支撑短轴有限元分析结果示意图
5 结论
综上所述,该智能鞋柜主要采用丝杠传动实现托板在竖直方向的移动,通过齿轮齿条传动实现托板在水平方向的移动,两个运动机构相互配合实现多层柜的换层,方便鞋子的拿放。另外在主柜的内侧增加紫外线杀毒装置,可以对鞋子进行消菌杀毒,此外清洁保养侧柜通过运用齿轮齿条传动、丝杠传动、剪叉升降机构来实现对鞋子四周灰尘的处理以及对鞋四周刷油、干燥等功能。仿真结果表明:所设计机构满足强度要求,满足以多功能需求为前提的同时,实现了空间利用率的最大化,同时该设计为同类家具的研究提供了借鉴。
