能量受限无人机与移动舰船通信中的轨迹优化
2022-09-06张艺严马巍李彬
张艺严,马巍,李彬*
1 四川大学 空天科学与工程学院,四川 成都 610065
2 航天神舟生物科技集团有限公司,北京 100086
0 引 言
无人机(unmanned aerial vehicle,UAV)具有高机动性、强视距(LoS)链路等优点,同时不受地理环境限制,在海上通信中拥有极大的性能优势,可以执行海上绘测、资源勘探、海难现场搜救、远距离视频传输等任务[1]。然而,由于无人机携带的能量有限,且传递的信息具有时效性,如何在无人机能量受限的情况下,将信息快速卸载到舰船成为当前研究的一大挑战。
目前采用无人机进行海上辅助通信已经得到了广泛的应用[2]。蒋冰等[3]总结了海上应急通信的特点,调研了国内外现有海上应急通信手段及其发展历程,分析了中国在海上应急通信方面的不足,分别从卫星、无人机、舰船等方面讨论了海上应急通信系统的建设思路。芒戈等[4]提出了5G 场景下以舰船编队为中心的无人机基站群组网的接入方案。随着无人智能体研究的逐渐深入,无人机通信中轨迹规划研究也成为一大热点。对于无人机通信中的轨迹优化,Zeng 等[5]研究了旋翼节能型无人机通信,考虑无人机的总能量消耗最小,为满足多个地面用户的通信吞吐量需求,利用凸优化技术寻求最优的悬停位置、持续时间、位置之间的访问顺序和速度。Huang 等[6]提出了一种无人机信息采集与传输的轨迹优化设计方案,在路径增益、信道容量和小区覆盖性能构成的指标集下使用凸优化方法确定最优路径点。随后根据生成的最优路径点,使用运动规划算法有效缩短了无人机执行不同任务时的飞行时间。Wu 等[7]研究了多UAV 的无线通信系统,采用多UAV 空中基站为地面用户提供服务,通过优化多用户通信的调度,将无人机轨迹和功率控制关联,最大化所有地面用户的最小吞吐量。然而上述文献只考虑了无人机平飞情况下的通信问题,并没有对无人机的动力学性能进行深入分析研究。
近年来学者们开始关注舰船与无人机之间的通信问题。Ji 等[8]分析了舰对空数据链路通信模型和无人机对空干扰模型,提出了一种基于S-TK仿真软件的通信对抗仿真方法,为无人机指挥员提供通信对抗决策依据。Tang 等[9]使用旋翼无人机进行海上覆盖增强,采用非正交多址接入技术,讨论了联合功率和传输持续时间分配问题,在考虑了船上通信能量限制的情况下,最大限度地提高船舶吞吐量。
现有文献中的无人机通信场景通常采用旋翼无人机,其特点是在固定位置上空悬停,可以进行更灵活的轨迹设计,但能量消耗更多。而固定翼无人机有更强的负载能力、更高的速度和更长的续航时间,但无法像旋翼无人机一样悬停在空中。因此,旋翼无人机使用更灵活,固定翼无人机则更适用于长期通信或环境监测。此外,固定翼无人机的飞行控制总体上更复杂,学者们普遍认为固定翼无人机的轨迹规划比旋翼无人机更具挑战性[10]。在对无人机航迹建模时,通常将无人机设定为固定高度,未考虑其完整的动力学性能,在二维平面上进行轨迹优化,建立通用的位置、速度、加速度运动学模型。
针对无人机与舰船通信的场景,舰船在海面航行时,受海浪和雷达等因素影响,舰船位置获取精度偏低。因此在舰船位置信息存在误差的条件下对无人机轨迹进行优化更贴合实际场景。为此,本文将采用固定翼无人机的三维动力学模型,对无人机与存在位置信息误差的舰船辅助通信过程中的无人机轨迹进行优化。将无人机的实际操纵力视为无人机动力学模型的输入。利用现代控制理论中的状态空间模型概念,将无人机耗时最小化问题表述为受状态约束的最优控制问题,同时受到飞行速度、高度和飞行路径角的实际约束。由于优化变量和状态约束本质上都是无限维的,因此将提出基于hp 自适应Radau 伪谱法的轨迹优化方法,并通过仿真验证该方法的有效性。
1 系统模型
研究场景如图1 所示,无人机在目标点进行数据采集后,返回舰船进行数据卸载。舰船在海面航行时,在海浪、雷达等因素影响下,其位置信息可能存在误差。本文主要设计目标是通过优化能量受限无人机的轨迹来最小化无人机的任务时间,同时满足无人机与舰船卸载的最小信息量,使无人机在能量消耗殆尽之前以最短时间前往岸边充电桩进行充电。

图1 无人机与舰船通信场景Fig. 1 Communication scene between UAV and ship
1.1 固定翼无人机数学模型
忽略迎角、发动机安装角以及侧滑力,将无人机速度、角速度和各外力的投影式通过坐标系转换,得到航迹坐标系下的动力学方程组[11]:
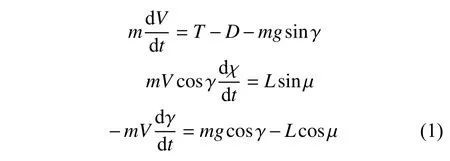
式中:V为无人机飞行速度; χ,γ分别为无人机飞行的偏航角和爬升角;T,D分别为无人机的推力与阻力;L为无人机升力; μ为滚转角;m为无人机质量;g为重力加速度常数。根据无人机空气动力学[10],考虑无人机低速飞行,阻力D=ρV2SCD0,其中 ρ为空气密度,S为机翼面积,CD0为无人机零升阻力系数。
将飞行速度投影到地面坐标系,通过坐标系转换,得到无人机空间位置随时间的变换规律:
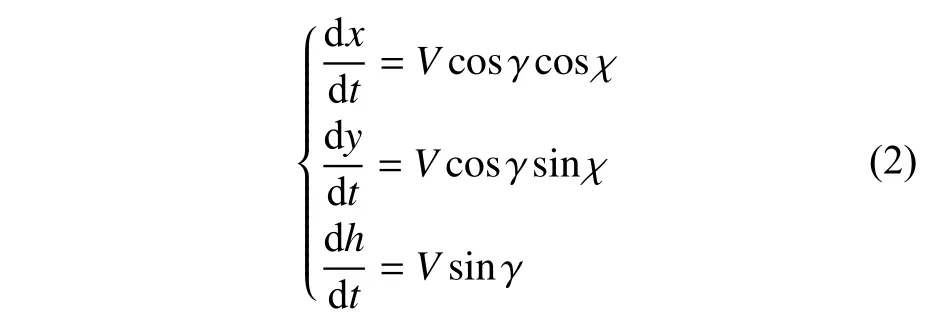
式中:q=[x,y]T,为无人机水平坐标;h为无人机飞行高度。
根据式(1)和式(2),建立如式(3)所示的固定翼无人机三维模型[12]。

式中,n=L/mg,为无人机过载系数。
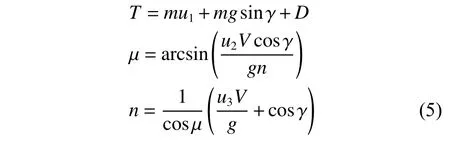
通过式(3)可以看出,固定翼无人机模型中存在很多分式,这使得其在求解问题中难以处理,为此做如下转换,令


式中,u1,u2,u3分别为飞行加速度、偏航角变化率和爬升角变化率。这样,系统实际控制量可以由u=[u1,u2,u3]T反推得到
通过式(3)和式(4),无人机飞行状态和虚拟控制量x=[x,y,h,V,χ,γ]T,u=[u1,u2,u3]T,得到无人机的状态空间表达式为

1.2 舰船运动模型和信道模型
实际情况下,舰船受到海浪等因素影响,难以得到舰船的准确位置信息。为此,需要建立带有坐标估计误差的信道模型。
为简化处理,将舰船视为质点,通过运动学方程得到如式(7)所示的舰船运动模型[13]。

其中, ηp为误差容限。这样,可以得到

式中, ℑ为所有可能的G的集合,即半径为 ηp的圆域。
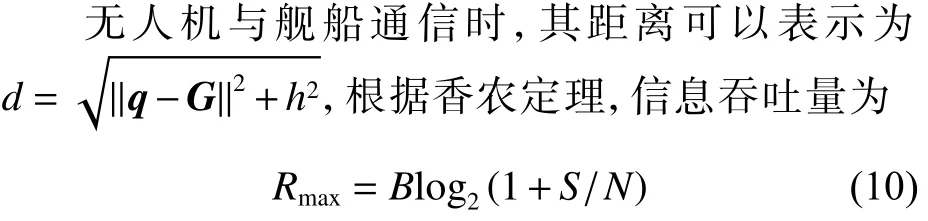
式中:B为信道带宽;S为平均信号功率;N为平均噪声功率;S/N为信噪比(SNR),通常以分贝表示,分贝数转换为1 0lg(S/N) dB。
假设时变信道遵循自由空间路径损耗模型,无人机与舰船信道系数可以表示为

式中, β0为 参考距离d0=1 m处的信道功率。假设Pmax为无人机的最大传输功率,可得

结合无人机坐标误差,可以将无人机飞行过程中与舰船之间最差情况的总通信量表示为

式中,tf为无人机执行任务的总时间。
1.3 能量模型
在与舰船进行通信过程中,无人机应在能量消耗殆尽前以最短时间前往岸上充电桩充电,因此需要建立无人机能量模型,确定无人机所能携带的最大能量。
无人机在飞行过程中主要受到4 个力的影响,即无人机发动机所产生的推力T,受到空气动力与力矩影响产生的升力L与 阻力D,以及无人机包括机身以及所有负载在内的重力mg。
由于固定翼无人机发动机能耗远远大于通信所损失能量,因此,可以将能量模型表示为[15]
式中:x4为 无人机速度;x6为无人机爬升角。
2 问题建立
根据建立的固定翼无人机动力学模型、信道模型、能量模型,进一步考虑无人机的实际性能等约束条件,将无人机与移动舰船通信中的轨迹优化问题建模为一个带有状态约束的最优控制问题。
2.1 问题约束
2.1.1 等式约束
考虑到无人机能量受限,需要前往岸边充电桩进行充电,因此为无人机添加如下终端等式约束:

式中: (xt f,yt f,ht f)为岸边充电桩位置上空坐标,即
x(tf)y(tf)z(tf)无人机任务终点; , , 为位置信息终端项。
2.1.2 不等式约束
考虑到无人机自身的性能问题以及安全问题,需要添加如式(16)所示的不等式约束。

根据无人机自身机动性能的影响,需满足最小速度Vmin以及最大速度Vmax,为保证无人机的安全,设置无人机最低安全高度为hmin, γmin和 γmax分别为无人机的最小爬升角和最大爬升角。无人机需要满足的总通信量约束和自身最大可消耗能量约束可以写为

为方便后续问题的建立,将式(16)和式(17)不等式约束统一表示为

2.1.3 控制量约束
对于无人机模型中的控制量,即无人机的加速度、偏航角变化率以及爬升角变化率,设置如式(19)所示的约束。

式中, [u1min,u2min,u3min]和 [u1max,u2max,u3max]分别为在飞行过程中无人机的加速度、偏航角变化率以及爬升角变化率的最小值和最大值。
2.2 问题描述
海域面积辽阔,无人机与舰船通信时需要对能量、时间等指标进行优化,本文将能量作为约束,以最小化通信任务时间为目标,提出轨迹优化方法。根据推导的无人机动力学模型式(6)、信道模型式(13)、能量模型式(14)和2.1 节建立的约束,将所要解决的时间最小化轨迹规划问题转换为一个带有等式约束和不等式约束的最优控制问题P1。

式中:(x0,y0,h0) 为无人机的初始位置坐标;v0, χ0,γ0为无人机速度、航向角、爬升角的初始值。
3 hp 自适应Radau 伪谱法
根据离散变量的不同,可以将直接求解最优控制问题的方法分为3 类。第1 类方法只对控制量进行离散,而状态是连续的,将每步求得的控制变量对动力学系统进行积分来更新状态和约束,如同控制参数化的方法一样[13]。第2 类方法则同时离散状态变量和控制变量,如配点法,将动力学约束在一系列配点上进行配置,用代数约束取代微分约束[16]。第3 类方法是只离散状态变量的微分包含法,通过求解部分状态方程消除控制变量,并将剩余的状态方程进行离散,优化变量则只剩下状态变量序列。伪谱法是配点法中的一种,通过使用数值微分来近似导数项,并基于Lagrange 插值全局近似或者局部近似[17];而普通配点法采用数值积分或有限差分法得到微分方程。本文采用基于hp 自适应Radau 伪谱法的求解方法,该方法具有收敛域宽、求解速度快,且不会对初值估计过度依赖等优点[18]。
3.1 Radau 伪谱法
Radau 伪谱法是一种正交配置方法,与Gauss伪谱法或Lobatto 伪谱法相比,其在区间切换点的状态变量连续性条件x()=x()的实现上更具优势[19]。Radau 伪谱法在Legendre-Gauss-Radau(LGR)配置点上的每个网格区间中离散状态和控制变量,从而将动态方程转换为代数约束,将原始问题转化为非线性规划问题(NLP)。具体步骤如下:
1)时间区间转换。通过将无人机飞行任务中所需要的通信时间t∈[t0,tf],分为N份网格区间 [tn-1,tn),n=1,2,···,N,其中tN=tf。那么,在每个网格区间内,时间都可以由 ζ ∈[-1,1)表示:

2) LGR 配点选择。在每个网格区间内选,通过求解下列Kn阶勒让德方程得到配点

其中,

3) 状态和控制变量离散化。额外增加ζ=1的配点,代表每个网格区间的状态终端值。通过Lagrange 多项式对连续的状态和控制量进行插值近似离散化,可得
式中:xn(ζ),un(ζ)为 连续的状态和控制量;Xn(ζ)和Un(ζ)为 离散后的状态和控制量;Li(ζ)为Lagrange多项式基式。
4) 动态方程转换。由式(24),状态变量对 ζ的导数为

进而,式(6)的状态空间表达式可以转化为如式(26)所示的代数约束。

5) 约束近似化。首先将问题P1中的等式约束W以及不等式约束ga表示为

代入近似后的状态以及控制量,约束可以近似为
经过上述步骤,将无人机执行任务时间最小化的轨迹优化问题转化为一个非线性规划问题,从而可以通过基于梯度的非线性规划求解器来提高计算效率。
3.2 hp 网络更新策略
基于上述步骤,对连续时间变量进行插值离散近似,还需评估离散化后的误差。在第n个时间区间内选取每2 个配点的中心位置,即

3) 继续细分网格区间,其子区间个数为Ir:

式中:ceil(α)为 在 α增 大的方向取整; τ为定义的误差阈值。令r=r+1,返回第1)步。
4) 增大网格区间内的配点个数Kn,新的配点个数为

令n=n+1,返回第1)步。
将基于hp 自适应Radau 伪谱法的算法流程总结如下:
步骤1) 初始化配点个数及网格区间数为K0。
步骤2) 应用SQP 算法求解Radau 伪谱法转化后的非线性规划问题。
步骤3) 计算每个网格区间的误差矩阵 ε,判断其是否超过阈值 σmax, 如果超过 σmax,则转至步骤 4);如果每个网格区间误差 ε都小于阈值,则结束求解,输出最优解,算法流程结束。
步骤4) 计算当前网格区间平均曲率c¯n,与最大曲率偏差值比较,若cn≥C*,则根据式(32) 继续细分该网格,否则按照式(33) 增加该区间配点数;所有网格更新后返回步骤2)。
4 数值仿真
本文采用的是固定翼无人机,其相关参数如表1 所示[20]。
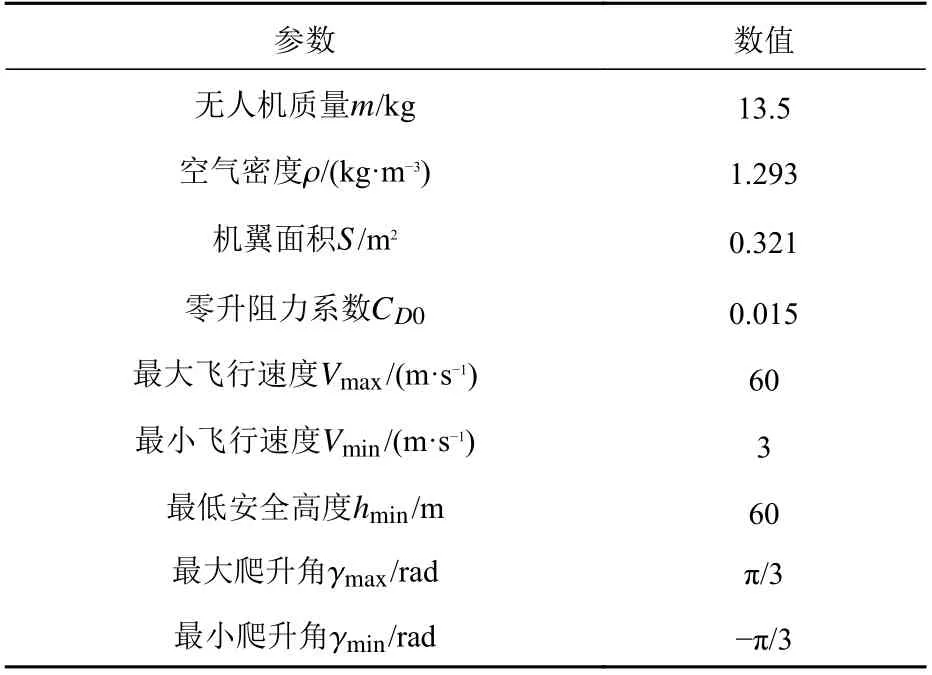
表1 固定翼无人机参数Table 1 Parameters of fixed-wing UAV
设置通信带宽B=1 MHz,对应的噪声功率σ2=N0B=-110 dBm,假设无人机的传输功率P=10 dBm, 并且参考信道功率 β0=-50 dB,因此可以得到无人机信噪比 为30 dB,假设坐标误差为η=40。
假设无人机初始位置为(0 m,0 m,100 m),终点岸上充电桩位置为(1 000 m,1 000 m,100 m)。舰船初始位置为(0 m,1 000 m,0 m),速度Vp=6 m/s, 航向角 θ=0,即考虑其匀速直线运动。本文考虑5 个场景:无能量约束的时间最小化场景(图2),带能量约束的时间最小化场景(图3),考虑更多通信吞吐量的带能量约束时间最小化场景(图4~图6),二维与三维优化对比场景(图7 和表2),hp 自适应Radau 伪谱法与p 伪谱法效果对比场景(表3)。
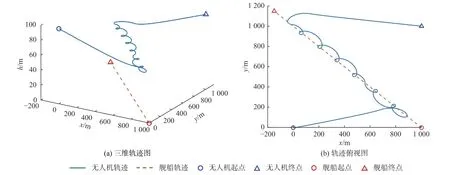
图2 场景1:无能量约束最小吞吐量800 Mbit 时无人机与舰船轨迹Fig. 2 Scene one: UAV and ship trajectory with a minimum throughput of 800 Mbit without energy constraints

图3 场景2:带能量约束最小吞吐量800 Mbit 时无人机与舰船轨迹Fig. 3 Scene two: UAV and ship trajectory with a minimum throughput of 800 Mbit and energy constraints

图4 场景3:带能量约束最小吞吐量1 000 Mbit 时无人机与舰船轨迹Fig. 4 Scene three: UAV and ship trajectory with a minimum throughput of 1 000 Mbit and energy constraints
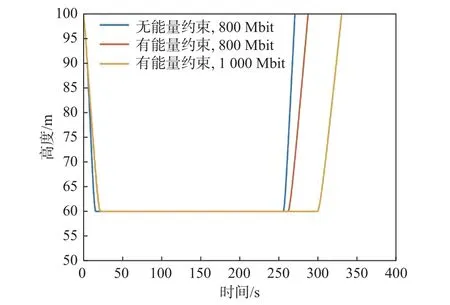
图5 无人机飞行高度变化曲线Fig. 5 Flying height variation curve of UAV
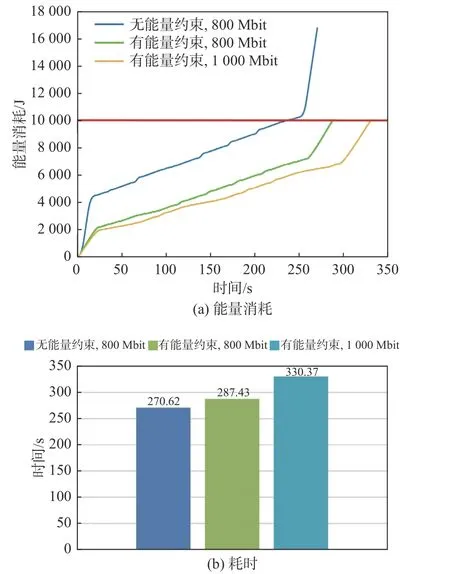
图6 无人机与舰船通信的能量消耗与耗时Fig. 6 Energy and time consumption for communication between UAV and ship

图7 场景4:带能量约束最小吞吐量800 Mbit 无人机二维飞行与舰船轨迹Fig. 7 Scene four: UAV 2D flight and ship trajectory with a minimum throughput of 800 Mbit and energy constraints
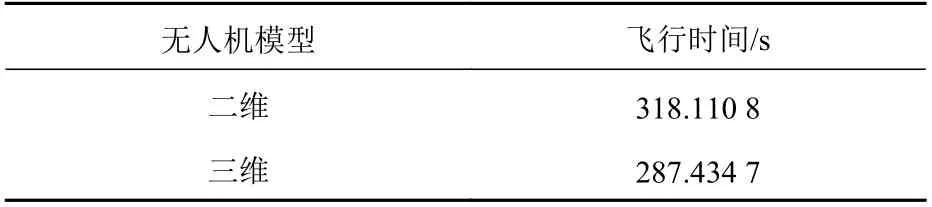
表2 无人机二维飞行与三维飞行时间对比Table 2 Comparison of 2D and 3D flight time of UAV
场景1:不考虑无人机的能量限制,假设无人机与舰船之间的最小总吞吐量为800 Mbit,无人机与舰船轨迹如图2 所示。无人机可以从起点飞往终点,在通信过程中可以很好地跟随移动舰船的轨迹进行通信。不难看出,为了在优化的同时满足与舰船之间的最小通信吞吐量,无人机从起点出发,首先快速接近目标点,随后沿着舰船行驶轨迹进行通信。由于无人机速度比舰船速度快,无人机会在移动舰船的上空进行盘旋通信,在完成通信任务量的同时快速前往岸上充电桩。通过无人机信道模型式(13)可以发现,无人机与舰船之间的距离越近,通信速率越大。与旋翼无人机不同,固定翼无人机无法悬停,所以采用盘旋方式与舰船进行通信。
场景2:考虑无人机的能量限制,假设无人机所能携带的最大能量为10 000 J,无人机与舰船之间的最小总吞吐量仍为800 Mbit,无人机与舰船轨迹如图3 所示。无人机仍旧可以从起点飞往终点,但为了节省能量消耗,轨迹与场景1 有所不同。通过对比图2(b)与图3(b)可以发现,当限制无人机的能量消耗后,无人机的轨迹盘旋曲线更加平稳,不会出现急转弯的情况,角度也不会短时间内发生剧烈变化,这样的飞行方式使无人机在与舰船通信的过程中更加节省能量。
场景3:无人机与舰船之间通信的最小吞吐量增加至1 000 Mbit,两者的通信轨迹如图4 所示。无人机仍可以从起点飞往终点,但是其轨迹与场景1 和场景2 有显著不同。可以看到,无人机与舰船的轨迹有一段重合。这是因为虽然相比场景2 仅仅增加了最小吞吐量,但是无人机最大能耗没有改变;为了保证无人机自身的能量消耗,其会以一个较低的速度跟随舰船通信,并减少盘旋所带来的能量消耗;与场景2 相比,其代价是增加了与舰船通信任务的耗时。
场景1~场景3 的无人机在与舰船通信过程中的高度变化如图5 所示,可以发现,无人机在任务开始时都会快速下降到最低高度。这与所建立的信道模型相符,因为舰船位于海面,高度越低,距离舰船越近,通信效率也会越高,可以大幅度减少通信耗时。
图6 为场景1~场景3 的无人机与舰船通信过程中的能耗与时间对比图,图中红色横线为设置的约束条件。在无能量约束情况下,无人机的能耗最高,但耗时最短。在增加能量约束后,随着与舰船之间最小吞吐量的增加,无人机与舰船通信的耗时会随之增多,这是因为无人机需要耗费更多时间在舰船上方进行通信。而在增大最小吞吐量后,为同时考虑能量限制,任务耗时会明显增加。通过上述3 个场景的研究,本文方法为有能量限制的无人机与舰船通信任务时间最小化轨迹优化问题提供了一个有效的解决方案。
场景4:研究无人机的三维运动轨迹,将无人机二维模型与三维模型的飞行轨迹进行对比。图7 所示为无人机高度固定在100 m 与海上移动舰船通信时的飞行轨迹,表2 给出了在最小通信总吞吐量800 Mbit,能量限制为10 000 J 情况下无人机通信任务的耗时。可以看到,无人机三维飞行耗时更短。这一实验结果表明,固定翼无人机的时间最小化轨迹通常是三维的。
场景5:采用hp 自适应Radau 伪谱法进行求解,并与p 伪谱法结果对比。相比于本文方法的更新策略,p 伪谱法不会根据每次求得的状态变量轨迹曲线的最大曲率比选择不同策略,而是在每次误差不满足要求时,直接选择细分网格区间,通过不断增加区间个数,将问题最终收敛到一个局部最优解。假设无人机与舰船之间的最小总吞吐量为800 Mbit,且最大携带能量为10 000 J,表3 给出了2 种方法优化得到的飞行时间和迭代次数。可以发现,本文方法得到的飞行时间仅略高于p 伪谱法几秒,但在迭代次数上远远小于p 伪谱法,大大节省了求解时间。
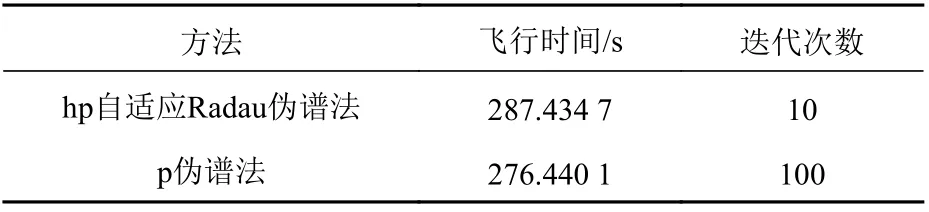
表3 不同方法飞行时间与迭代次数对比Table 3 Comparison of flight time and iteration times of different methods
5 结 语
本文研究了具有能量限制的固定翼无人机与舰船三维通信场景,考虑到海面众多因素导致舰船坐标的不确定性,讨论了无人机与存在坐标估计误差的移动舰船的通信问题,并选取无人机通信任务时间作为优化目标,优化无人机与移动舰船通信中的三维轨迹。与大多数现有设计不同之处在于,由于引入了无人机的动力学性能,本文方法同时优化了无人机的轨迹和控制输入。因此,采用本文方法优化的轨迹在实际应用中更易跟踪。但要解决该最优控制问题,仍存在许多挑战,为此采用hp 自适应伪谱法将无人机通信中的轨迹优化问题转换为非线性规划问题。通过仿真实验验证,无人机在满足自身能量约束与飞行性能约束的情况下,可以满足海上移动舰船与无人机之间的最小通信总吞吐量,说明本文方法可以有效解决有能量限制的无人机与舰船通信任务时间最小化轨迹优化问题,为海上通信系统提供有效的解决方案。
现有固定翼无人机动力学数学模型的研究主要集中在三自由度质点模型方面,这对于实际无人机来说不够精确。在后续研究中,可以对六自由度刚体模型进行深入研究。此外,本文考虑的场景为单无人机与单舰通信场景,未来可以对多无人机群或舰队通信场景作进一步研究。
