3D SLAM背包式扫描仪在旧建筑改造辅助测量中的应用
2022-09-06吴凯华
彭 浩 吴凯华
1广州市城市规划勘测设计研究院,广东 广州,510060
城市化的加速发展阶段,存在着大量的旧建筑亟需测量改造。传统的测量模式,受限于旧建筑及其地下室狭小的空间,对向通视难,GPS信号弱,目标点复杂繁多、光线昏暗全站仪无法对准等特殊情形,造成采集数据效率差,容易出现错漏等劣势[1]。
目前,地面场景的三维点云数据获取一般分为两种,移动式激光扫描和固定式激光扫描[2]。现有的地面移动测量系统通常是基于车载的移动测量系统的[3],但地面移动测量系统均需要依赖于全球卫星导航系统和惯性导航系统,只能用于室外环境。固定式激光扫描虽然可以用于室内室外环境,但是复杂场景需要大量换站测量,然后再进行点云拼接[3-5],数据获取的效率十分低下。
3D同步定位与建图(3D simultaneous localization and mapping,3D SLAM)技术在移动测绘方面具有较好的应用,能够对室内和室外的地面水平环境进行地图构建和环境建模,降低了测量复杂性,无需大量标记地物特征点[6-8],能在GPS信号中断的情况下正常作业,适用于在室内室外场景,能够解决传统测绘中的定位及场景重建问题,且数据采集方式简单,无需外业人员具备较丰富经验即可完成工作,降低作业门槛。本文利用3D SLAM背包测量机器人在广州市越秀区采集旧建筑及其地下室数据点云,利用三维点云数据制作立面图、平面图等信息,并根据人工量尺方式对点云量测结果进行精度评定。
1 旧建筑改造辅助测量方案
本次旧建筑辅助改造测量采集的数据范围为广州市越秀区某旧建筑地下室3层以及地上主体2层。由于3D SLAM技术可脱离GNSS信号作业,对工作环境又有极强的适应性[6,8],具体表现为:①外业数据采集速度极快,可快速获得所需点云数据,数据精度高;②内业点云预处理时间短,自动化程度高,基本不需要人工干预,短时间便能获得配准好的点云数据;③操作简单方便,无需换站,连续采集,具有连贯性,可实现室内外一体化扫描作业。而该地下室常年未经使用,光线昏暗并存在积水,是3D SLAM背包式扫描仪比较合适的作业场景。因此,采用3D SLAM技术的背包式扫描仪对该旧建筑进行数据采集,其结构图如图1所示。

图1 3D SLAM技术的背包式扫描仪Fig.1 Backpack Scanner Based on3D Slam Technology
通过点云数据采集,获取建筑结构尺寸信息,具体包括柱、梁、墙体;项目需提供上述细部具体尺寸、位置信息,辅助制作建筑平面、立面图纸,从而设计建筑改造方案。其项目技术流程如图2所示。
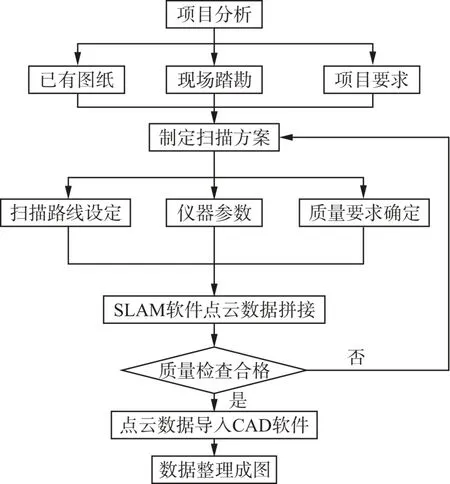
图2 项目技术方案流程Fig.2 Project T echnical Proposal Process
2 数据处理及制图
2.1 数据采集及预处理
在数据采集之前需搜集项目工地信息,包括但不限于已有图纸、现场照片,需提前踏勘现场规划数据采集路线,避免出现重复采集和数据漏采,出于3D SLAM背包扫描机器人采集数据原理的特殊性,采集数据移动路线需设计成闭合环路,结合设备特性和经验判断,环路边长适宜控制在200 m以内。点云数据的预处理(主要包括点云配准、去噪、拼接等)均内置在随机软件中完成。
设备采集完数据并预处理之后,成果为具有位置信息的点云数据。一般情况下,用户的需求并不是直接的点云数据,而是在数据基础上二次加工,生成的满足用户特定需求的产品[9-13],本项目需要在三维点云数据基础上生成建筑平面、立面、剖面图纸。
2.2 平面图制作
初期考虑到图纸格式的通用性,本项目主要在AutoCAD平台上进行,首先将点云数据导入Auto-CAD中,显示效果如图3所示。

图3 点云在CAD中的显示Fig.3 Display of Point Cloud in CAD
为获取建筑目标信息、需采用切片方式,显示建筑物内部间隔形状、走向、宽度等信息,并在点云数据中勾勒出内部间隔线,其具体步骤如下。
1)确定切片的位置:某一层平面图可以理解为三维物体在某个平面上的投影,首先要确定这个投影面的位置,可以采用旋转点云的方式选择投影面,也可通过自定义坐标系方式选择,前者变动了点云的绝对位置,后者在原坐标系下点云坐标位置不变。对于建筑物平立剖面制图,变动点云绝对坐标位置并不影响成果。
2)在自定义坐标系下,选择合适的视图(正视、俯视等),并在视图下勾勒出建筑物立面轮廓。
3)轮廓勾勒完成之后,旋转点云数据检查轮廓。
AutoCAD切片操作中需注意切片厚度,过厚容易造成点云数据密集,导致视觉判断复杂而引发错漏。部分点云制图效果如图4所示。
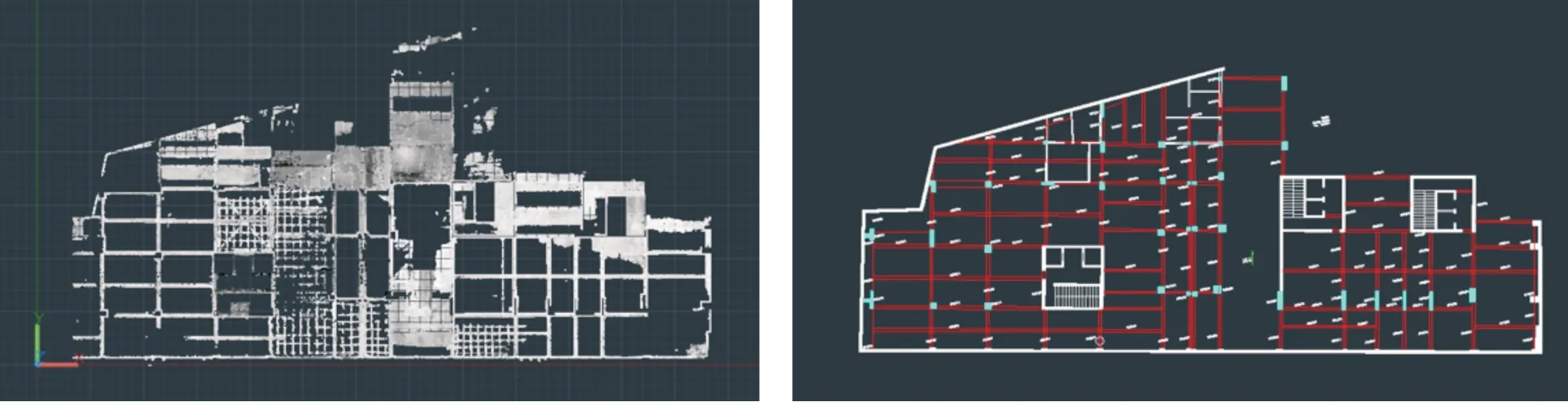
图4 部分点云制图成果Fig.4 Some Point Cloud Mapping Results
剖面图的制作方法与平面图基本一致,区别在于切片的角度不一样,这里不再重复。
2.3 立面图的制作
对于建筑物的立面图制作,主要分为以下两个步骤。
1)剔除立面非建筑物点云。在点云采集过程中,目标建筑周边存在树木、杂物等干扰点云数据,需在绘制立面图之前予以剔除,以免影响立面图绘制时的判断。
2)选择合适的视图(正视、东至北等视图),并在视图下勾勒出建筑物立面轮廓。
3 成果精度分析
通过点云的配准拼接处理得到地下室和地上建筑物的内外部的点云数据。在获得的点云中选取充分的特征物,例如柱子、横梁、房角等规则物体。然后利用GPS、全站仪、卷尺等常规测量手段测量,检核这些特征物体的特征点和特征线。利用量取间距等空间工具量取点云特征物的长宽高等数据作为观测值。计算差值Δ=观测值-检核值。
由于点云数据的密集性,观测值需要依靠人工判别去获取,存在偶然误差的影响。采用多次量测取平均值方式,尽量降低人工判读误差的影响。本文区分地上、地下建筑物特征值,分别统计观测值和检核值。
根据式(1)计算得到中误差RMSE(root mean square error)并最终以中误差作为本次试验评价精度的标准。

表1给出了地下室平面精度结果,表2给出了地上主体建筑平面精度结果,图5给出了地下室及地上建筑物差值误差分布图。
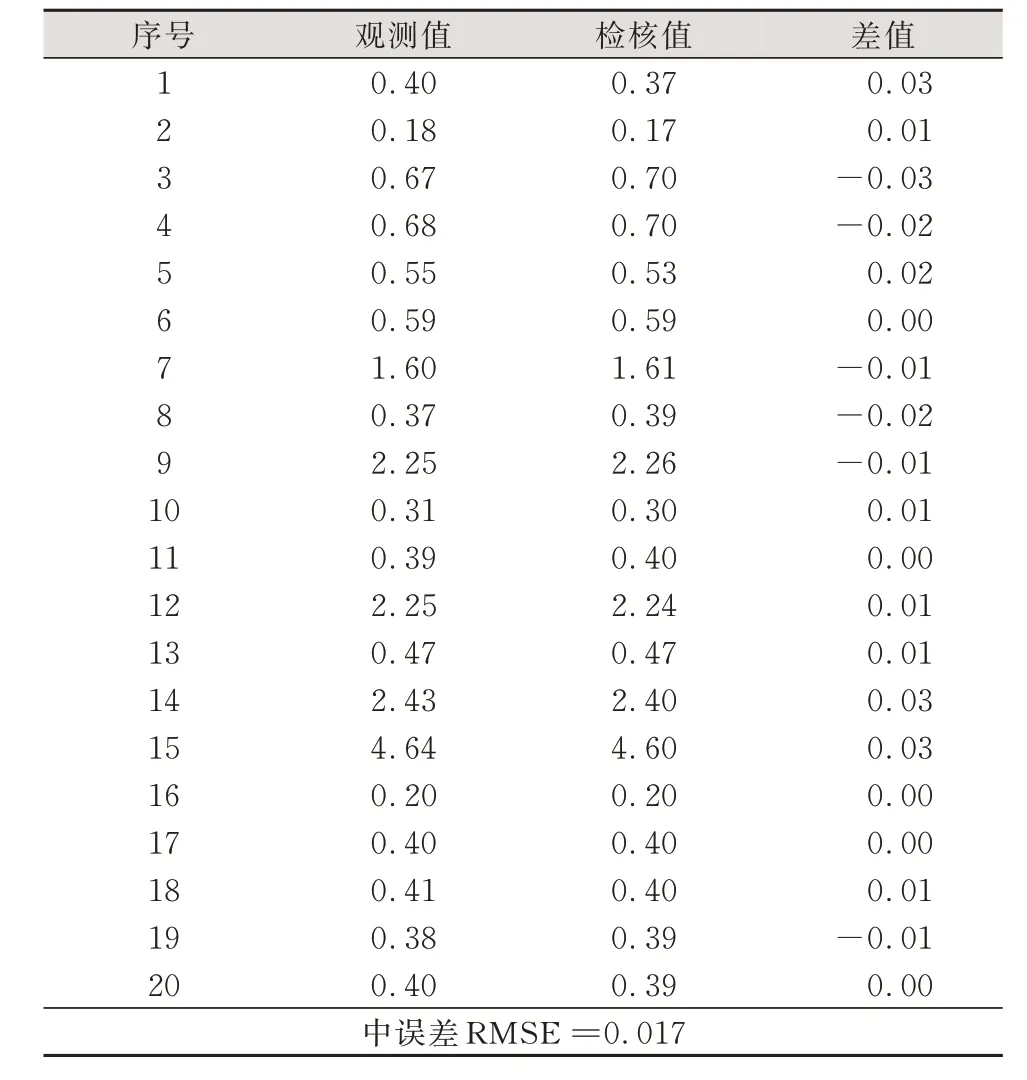
表1 地下室平面精度结果/mTab.1 Basement Plane Accuracy Results/m
由表1、表2及图5可以看出:
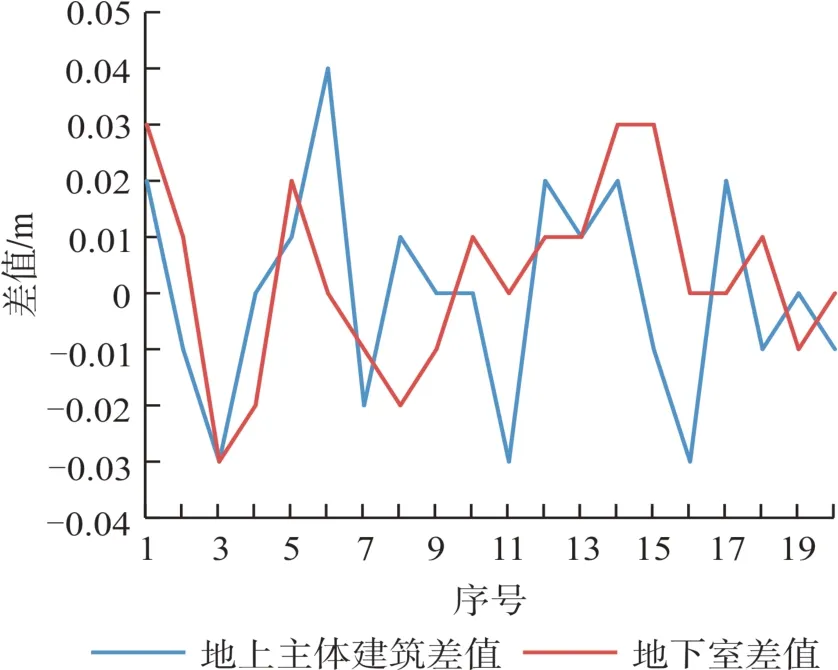
图5 地下室及地上建筑物差值误差分布图Fig.5 Difference Error Distribution of Basement and Aboveground Buildings
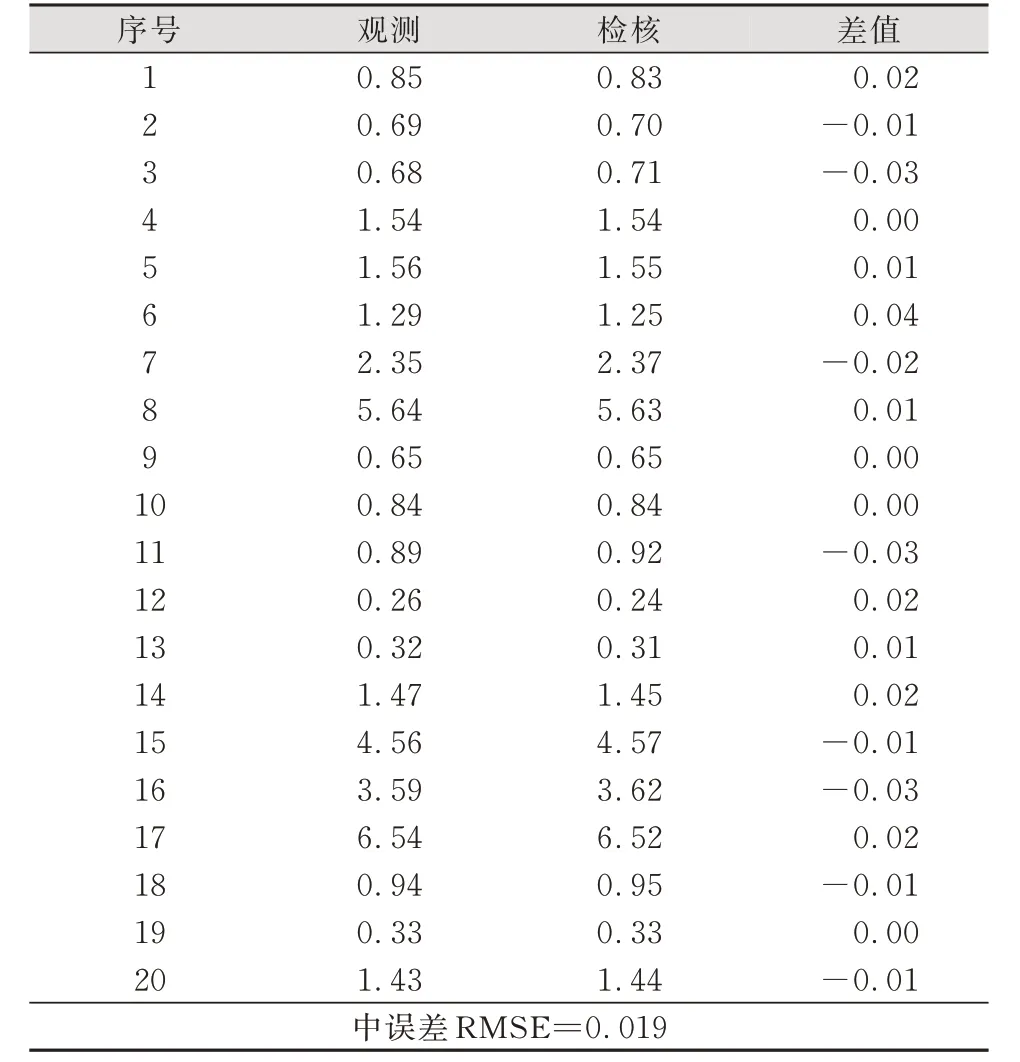
表2 地上主体建筑平面精度结果/mTab.2 Plane Accuracy Results of Main Buildings on the Ground/m
1)三维点云数据测量出的建筑物尺寸与以人工量尺方式的检核值,误差最大绝对值为4 cm,最小值为0,误差有正有负,不存在统一的偏大或者偏小,说明并无系统性偏差;
2)较差统计值中误差小于2 cm,基本满足旧建筑改造等一般工程测量精度要求;
3)地面及地下较差统计值中误差基本一致,3D SLAM背包式测量机器人在室外无遮挡情况下可获取GNSS信号获取绝对坐标,在室内GNSS信号缺失的情况下则需要依靠SLAM算法自动捕捉相邻时刻的同名特征点并同步配准,且本次旧建筑辅助测量成果为平面、立面、剖面建筑布局、尺寸,对建筑绝对坐标精度无要求,相对精度依靠的是同样的SLAM算法,故两者中误差统计值基本一致。
4 结束语
本文利用3D SLAM技术的背包式测量机器人,以广州市越秀区某旧建筑物的地下室3层以及地上主体2层辅助改造测量的具体应用为例,设计了该项目的作业流程和技术方案,实验结果较好地证实了该种新型技术在旧建筑等室内狭小空间测量中的适用性与优越性,并通过人工量尺方式验证成果误差约0.02 m,基本上能满足一般工程测量的精度需求。
