不同渗透率下非信控交叉路口混合预约多车协同控制*
2022-09-05钟文沁孔伟伟李志恒罗禹贡
钟文沁,孔伟伟,李志恒,于 杰,罗禹贡
(1. 清华大学深圳国际研究生院,深圳 518055;2. 清华大学车辆与运载学院,北京 100084;3. 中国农业大学工学院,北京 100083)
前言
智能网联汽车(intelligent and connected vehicle,ICV)和车联网的应用可以有效提高交叉路口通行效率、减少交通排放。非信控交叉路口是研究ICV 多车协同控制方法的重要场景。非信控交叉路口多车协同控制方法旨在实现车辆在无信号灯调度的情况下有序高效地通过交叉路口。相比起依靠信号灯调度,非信控方法有消除车辆起步延迟、缩短车辆通过路口时间等优点。现有非信控交叉路口多车协同控制研究多针对全ICV 环境。目前各国智能网联汽车产业不断发展,但ICV 的全面普及仍需要时间,短期内实现道路上所有车辆均可网联通讯的情景过于理想。因此,充分考虑人类驾驶车辆(human-driven vehicle,HDV)行为特性,研究非信控交叉路口HDV 和ICV 并存的混合多车协同控制方法,并探讨不同ICV 渗透率对控制效果的影响,具有重要的科学价值和现实意义。
现有的全ICV 环境下非信控交叉路口多车协同控制可分为分布式控制和集中式控制。分布式控制的实现一般依靠ICV 的自身决策,即车辆在路口利用自身搭载的算法、模型、通讯系统等进行路径规划和行动决策。集中式控制一般依靠一个集中控制器对需要通过交叉路口的ICV 进行多车协同控制。Lee 和Park提 出 了 一 种CVIC(cooperative vehicle intersection control)算法,以消除轨迹重叠的方式实现多ICV 无碰撞通过交叉路口。孙宁等基于增强型Dijkstra 算法提出了一种交叉路口空间分配的方法,以实现ICV 在非信控交叉路口的高效通行。张文亮等提出了一种基于区块链技术的多车位置信息共享技术,以实现ICV 在非信控交叉路口的协作通行。Chai等将冲突方向来车的车间时隙进行分类和分配,以实现多车无碰撞通过交叉路口;同样从时间分配角度进行多车协同控制的还有预约式方法,它是一种基础而经典的非信控交叉路口多车协同控制方法。Fortelle是最早研究预约式方法的学者之一。他认为预约式方法应该优先保证避撞,其次考虑效率。在预约式方法中,路口通常被划分为若干单元格,ICV 将对其路线上要占用的单元格进行预约。最早提出这种单元格划分预约方法的是Dresner 和Stone。这种“单元格预约”思想成为了后来学者们设计预约式控制策略的基础。
然而,现有预约式方法多假设所有车辆为ICV,未考虑存在无法通信的HDV 的混合交通流情况。一般将ICV 占道路车辆的比例称为渗透率。现有对渗透率变化对交叉路口通行效率影响的研究多针对有信号灯的信控路口。Cui 等对混合交通流在信控路口的特性(包括交叉路口交通流、平均队伍长度、平均速度等)随渗透率的变化进行了仿真研究,发现在渗透率高于50%时,路口通行能力随ICV 占比增高而提高;Delis等通过仿真探究了渗透率变化对信控路口通行效率的影响,结果显示ICV 渗透率越大,道路车辆密度越小,车辆平均速度越大、停车延迟时间或空转时间越少,燃油经济性改善,CO排放量减少。
综上所述,预约式方法是非信控交叉路口多车协同控制的典型方法,但少有在策略设计中考虑HDV 行为特性的相关研究,更未在非信控交叉路口的场景下探究ICV 渗透率变化对交通效率的影响。因此,本文旨在基于预约式方法,面向非信控路口提出一种考虑HDV 行为特性的多车协同控制方法(以下简称混合预约多车协同控制方法),并探讨渗透率变化对非信控路口通行效率的影响。首先,建立非信控交叉路口混合预约多车协同控制架构。其次,制定混合预约多车协同控制策略,具体包括考虑HDV 行为特性的ICV 单元格预约策略和ICV 速度控制策略。最后,基于SUMO 和Python 搭建非信控交叉路口混合交通联合仿真平台,验证所提出混合预约多车协同控制方法的有效性;并以交叉路口通过率和路段平均速度为评价指标,分析渗透率变化对非信控交叉路口通行效率的影响。
1 非信控交叉路口混合预约多车协同控制架构
本文的研究场景为一个4 向3 车道的非信控交叉路口,如图1 所示,交叉路口区域被划分为两个功能区:通过区和准备区。针对通过区,将其划分为若干单元格,ICV 通过预约单元格来占用通过区空间;为保证车辆严格在规定时间段占用相应单元格,规定所有车辆进入通过区后以恒定速度行驶。针对准备区,其路段长约50 m,是车辆的监管区域,ICV在其中接受集中控制器的调速命令,HDV 在其中受路侧单元的监测;准备区被划分为预约区和加速区两个子区域,子区域的进入线分别为预约线和等待线,分别为ICV 发出预约申请的基准线和停车等待的分隔线。

图1 混合交通流下非信控交叉路口场景
本文中的HDV 是无法通讯的理性驾驶个体,即其能够遵循交通规则、与前车保持安全距离,但无法通过电子通讯设备获取或发送信息。因此,本研究建立了考虑HDV 行为特性的混合预约多车协同控制架构,如图2所示。

图2 混合预约多车协同控制架构
如图2所示,ICV到达预约线后向集中控制器发送预约申请(申请信息包括自车尺寸、行进路线等),以便集中控制器为其分配占用的单元格序列;路侧单元为集中控制器提供交叉路口路面信息(例如HDV 数量、位置等);集中控制器根据ICV 和路侧单元提供的信息,运行混合预约多车协同控制策略。该策略的输出为满足预约结果和行驶约束条件的ICV 准备区速度变化曲线,集中控制器将据此向准备区内的ICV 发送实时的速度控制指令。本研究假设车辆在路口拥有理想通信环境,即不考虑ICV 与集中控制器的通信延迟。
2 混合预约多车协同控制策略
在考虑HDV 行为特性的基础上,基于预约式方法设计混合预约多车协同控制策略,其逻辑图如图3 所示。该策略包含两个子策略:考虑HDV 行为特性的ICV 单元格预约策略和ICV 速度控制策略。前者的决策目标是根据“先到先得”原则分配通过区单元格的可占用时间,并据此得到ICV 需要在准备区内行驶的总时长,s;后者则根据预约结果,求出ICV在准备区的速度变化曲线(),以保证ICV在规定时刻到达路口,使预约成立。本小节将对这两个子策略进行详细阐述。

图3 混合预约多车协同控制策略逻辑图
2.1 考虑HDV行为特性的ICV单元格预约策略
2.1.1 无HDV 进入准备区时ICV 对交叉路口单元格的预约规则
若准备区内仅有ICV,其预约流程包括两个步骤:(1)获得ICV 将占用的单元格序列和相应单元格的可占用时段;(2)更新被预约单元格的占用情况,计算ICV准备区通行时长。
(1)获得ICV 将占用的单元格序列和相应单元格的可占用时段
将通过区的单元格进行编号(、、……),示意图如图4 所示,其中双下标代表单元格在通过区空间中所处的行列。对于不同行进路线的ICV,其将占用的单元格序列不同。ICV 将占用的单元格序列表示为=[c,= 1,2,……],其中c表示中的第个单元格。比如,针对route1(由西向东直行)上的ICV,=[,,,,,]。

图4 单元格编号示意图
定义单元格被占用时段列表(occupied period list,OP list)形式为

式中(τ,τ)为某ICV 对该单元格的既有预约时段,角标,越大,时刻的数值越大(,= 1,2,3……),式(1)中的角标均为随机取值,仅为示例。
设单元格边长为,ICV 到达预约线的时刻为,到达通过区的时刻为。对于=[c,= 1,2,……],分别以和表示到达和离开序列中第个单元格的时刻,即ICV 对第个单元格的占用时间段为(,)。则

即到达通过区的时刻即为占领第1 个单元格的时刻。检索本车中所有单元格的最末占用时间点,相应单元格为C,则本车最早可以占用C的时刻为,即

式中v为车辆在通过区内的规定行驶速度。则对于中其他单元格,有

由此便得到了本ICV 将占用的单元格序列和相应单元格的可占用时段。
(2)更新被预约单元格的占用情况计算ICV 准备区通行时长
将ICV 对单元格的占用信息更新到OP list 中,以便后车访问单元格的占用情况。假设=[C,= 1,2,……],且= 2,则式(1)更新为

规定道路限速。以表示准备区长度,则在不超过限速的情况下,ICV 在准备区内的通行时间为

由此便完成了被预约单元格占用情况的更新,并得到了ICV在准备区内的行驶总时间=。
2.1.2 考虑HDV 行为特性的ICV 交叉路口单元格预约策略
规定HDV 在路口的行驶规则为HDV 到达预约线时:(1)若预约区内有他车,则跟车通过,称其为跟车HDV,被跟车的ICV 称为领队ICV;(2)若预约区内无他车,则在遵循基本交规的前提下自行通过路口,称其为自由HDV。对于自由HDV,若其接近路口时冲突方向上也有自由HDV 驶来,则本车遵循右手规则进行避让。
当HDV 到达预约线,由于其没有通信功能,无法接受集中控制器根据“先到先得”排序生成的控制命令进行行驶,故可能与遵循既定预约方案行驶的ICV 相冲突。因此,需要制定一套策略来修正既有预约,令ICV 避让HDV。出现需要预约修正的情况有两种:(1)ICV 预约时身后有跟随的HDV;(2)ICV冲突方向上有自由HDV。
(1)ICV预约时身后有跟随的HDV
该情况下的预约修正方法为领队ICV 的不变,延长其对单元格的占用时长,覆盖跟车HDV 的通过时间。在领队ICV 离开准备区前,跟车HDV 完全跟随ICV 速度进行变速;领队ICV 离开后,跟车HDV 前方视为无其他车辆,以最大限速进行行驶。故取跟车HDV产生的单元格附加占用时间为

因此,领队ICV 对单元格的占用时段将由(,)变为(,+),即式(5)可修正为

(2)冲突方向上有自由HDV
该情况下的预约修正方法为集中控制器根据路况和HDV 行驶规则,预测一段自由HDV 将占用单元格的“等效占用时段”,并检索已有预约时段中与之冲突的时段,将冲突ICV 的可占用时间后延避让自由HDV,单元格预约修正流程图见图5。
如图5 所示,设车辆通过一个单元格的时间为,则对所有单元格,有

图5 避让自由HDV的单元格预约修正流程图

将HDV 将占用的单元格序列表示为=[c′,= 1,2,……],对 ICV 有=[c,=1,2,……],则有

式中{b}为HDV 与冲突ICV 将占用的单元格交集。设HDV 对b的占用时段为(′,′),ICV 对b的占用时段为(,)。在所有的潜在冲突ICV 中检索出将最先与HDV冲突的ICV,判断条件为

称该ICV 为首辆冲突ICV,修正后其能进入b单元 格 的 时 刻 即 为HDV 离 开b单 元 格 的 时 刻′。以( , )表示HDV 影响的第辆ICV 的占用时段(=1,2,3……),则 对 首 辆 冲 突ICV 有(,)=(,+ τ)。接 下来 检查首 辆冲突ICV 后的ICV是否会被(,)的变更所影响,受影响条件为

若影响,则( , )变更为( , +),以此类推,直至出现不再受影响的ICV,检查结束。将HDV 的“等效占用时段”(′,′)和受影响的ICV经过修正后的单元格占用时段更新到OP list 中,即完成了本情况下的单元格预约修正。
对于受影响的ICV,其到达通过区的规定时刻发生了改变,故产生了一个新的准备区剩余通行时间。设HDV 到达预约线使受影响ICV 进行预约修正的时刻为,则对第辆受影响ICV,有

集中控制器将根据和ICV 剩余准备区行驶距离等条件,重新求解ICV速度变化曲线。
2.2 考虑HDV行为特性的ICV速度控制策略
以表示准备区总长度。ICV 在准备区内的速度控制问题可视为一个总行程时间确定(=或)、总行程确定(=或)的速度函数求解问题。求解速度变化曲线()时遵循的约束条件为

对于有自由HDV 进入交叉路口且“插队”了既有预约的情况,由于生成时受影响ICV可能在准备区内的任何位置,剩余行驶距离、与前车距离、自车速度等情况都不确定,需要单独考虑。因此,将速度曲线求解情景分类为:(1)ICV 在准备区行驶过程中未受HDV影响,即总行程时间=,总行程=;(2)ICV 行驶到准备区某位置时,因避让冲突方向上的HDV 而进行了预约修正,即总行程时间=,总行程=。
(1)=,=
为简化计算,认为ICV 在准备区内做匀速或匀变速运动。若ICV 预约时准备区内无他车,则无需考虑避撞问题,在式(14)约束条件下求解匀变速运动方程组,即可得到速度变化曲线()。
若ICV 预约时准备区内有他车,则确定准备区行驶方案时还需要考虑对前车的避撞问题。该情况下ICV速度控制策略见图6。
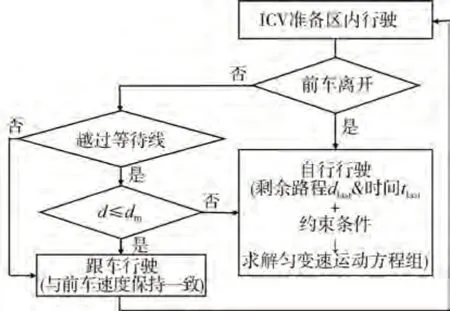
图6 预约时准备区有他车的ICV速度控制策略
(a)前车未离开时,为尽可能减少与前车的冲突,ICV 未越过等待线时进行跟车行驶;ICV 越过等待线到达加速区后,根据其与前车的车距是否小于安全距离,分为继续跟车行驶和自行行驶。
(b)前车离开后,集中控制器根据ICV 的剩余准备区通行时间和剩余准备区通行距离,生成满足式(14)约束条件的速度变化曲线。
(2)=,=
该情况下,若修正既有预约时ICV 前方无他车,则求解时不用考虑避障问题。设减速度为a、减速末速度v,加速度设为a、初速度为v。假设:ICV行驶过程无停车或匀速行驶过程。已知车辆到达路口的末速度为= 10 m/s,则通过求解匀变速运动方程组,有

上述假设成立的条件为v>0。若v<0,则ICV 需要在准备区内匀速行驶一段距离才能满足式(14)约束条件。
若修正既有预约时ICV 前方有他车,则需要同时考虑式(14)约束条件和避撞问题。该情况下ICV速度控制策略见图7。

图7 预约修正时准备区有他车的ICV速度控制策略
如图7 所示,ICV 因避让HDV 发生预约修正时,若其未越过等待线,则行驶策略与(1)情况相同;若ICV 已跨过等待线进入加速区且前车还在,为保证安全,在前车离开准备区前ICV 均跟车行驶,前车离开后再自行行驶。
3 仿真验证
为验证所提混合预约多车协同控制架构和控制策略的有效性,本文搭建了SUMO/Python 联合仿真平台,在不同渗透率、不同流量下进行仿真,并以路口通过率和路段平均速度为评价指标,分析不同渗透率和车流量对非信控交叉路口通行效率的影响。
3.1 仿真设计
搭建如图1 所示的4 向3 车道非信控交叉路口仿真场景。车辆行驶模型采用Li 等提出的基于态势感知的汽车跟驰避碰模型。分别在每个方向车流量为2 100、3 000 和3 900 辆/h 的情况下,在渗透率分别为100%、90%、60%、30%下进行仿真,主要仿真参数如表1 所示。其中,100%渗透率下,交通流组成为全ICV。对于混合交通流,90%渗透率下,每条道路上每10 辆车中有1 辆是HDV;60%渗透率下,每条道路上每10 辆车中的第2、5、6、9 辆车是HDV;30%渗透率下,除进入仿真的第1 辆车外,每条道路上每10 辆车中的第1、2、3、5、7、8、9 辆车是

表1 混合预约多车协同控制方法仿真参数选取
HDV。
交叉路口通行效率评价指标采用路口通过率和准备区的路段平均速度。路口通过率含义为单位时间内通过路口的车辆数目,辆/min。路口通过率越高说明相同时间内交叉路口能够吞吐的车辆越多,交通效率越高。路段平均速度指的是准备区路段上所有车辆速度的平均值,m s。路段平均速度越低说明道路上的车辆行驶越缓慢,交通效率越低。
3.2 仿真结果及分析
(1)路口通过率
在不同流量、不同渗透率下进行仿真,路口通过率随渗透率变化的结果如图8 所示,横轴为ICV 渗透率,纵轴为路口通过率。
由图8 可见,在不同流量下,路口通过率均随ICV 渗透率的提高而提高,即ICV 在交通流中占比越大,交叉路口通行效率越高。

图8 不同流量下路口通过率随渗透率的变化曲线
(2)路段平均速度
不同流量、不同渗透率下路段平均速度随时间的变化曲线如图9所示。
由图9 可见,前20 s 内,仿真中的车辆从不同方向驶向交叉路口,到达准备区的车辆较少,各流量下的交叉路口路段平均速度在不同渗透率下变化情况基本相同;从20 s 往后,更多车辆进入准备区,准备区内逐渐出现排队情况,各流量下的路段平均速度均随时间的推移而降低,且渗透率越低,下降速度越快。

图9 不同流量、不同渗透率下路段平均速度变化曲线
计算不同流量、不同渗透率下的路段平均速度平均值,以进一步分析不同流量下渗透率变化对路段平均速度的影响,结果如图10 所示。从图中可以看出,渗透率相同时,车流量越大,路段平均速度越低;车流量相同时,渗透率越高,路段平均速度越高。

图10 不同流量、不同渗透率下路段平均速度平均值
综上所述,对于混合交通流下的非信控交叉路口,其不同车流量下的路口通行效率均随ICV 渗透率的提高而提高。
4 结论
(1)针对混合交通流下的非信控交叉路口,本文提出了混合预约多车协同控制方法,以实现ICV 和HDV 混行的非信控交叉路口多车协同控制。为验证本方法的有效性,搭建了SUMO/Python 联合仿真平台,分别在车流量为2 100、3 000、3 900 辆/h 下、ICV 渗透率为100%、90%、60%、30%的情况下进行了仿真,并以路口通过率和路段平均速度为指标,分析了渗透率对交叉路口通行效率的影响。仿真结果表明,在不同流量下,非信控交叉路口通行效率均随渗透率的提高而提高。
(2)传统预约式方法未考虑HDV 在非信控交叉路口的通行方法,本方法提出的考虑HDV 行为特性的ICV 单元格预约策略,在HDV 靠近交叉路口时实时修正控制区内ICV 的既有预约,令ICV 引导或避让HDV 安全通过交叉路口;此外,本方法提出的考虑HDV 行为特性的ICV 速度控制策略,可以在考虑HDV 行为特性的基础上,实时调整控制区ICV 行驶速度,较好实现了车辆按照预约策略规划的通行次序通过交叉路口。
