面向混合自动驾驶车流的协同自适应巡航控制*
2022-09-05彭理群王依婷马育林许述财
彭理群,王依婷,马育林,许述财
(1. 华东交通大学交通运输工程学院,南昌 330013;2. 清华大学苏州汽车研究院(相城),苏州 215132;3. 清华大学,汽车安全与节能国家重点实验室,北京 100084)
前言
智能网联汽车能够通过车载设备、控制决策系统和车联网信息平台实时获取车辆运动状态、驾驶意图和道路环境信息,并辅助驾驶人预测碰撞风险、优化行车路线,从而有效增强行车安全性,提升道路交通系统的通行效率。据最新发布的《智能网联汽车技术路线图2.0》规划显示,到2025 年PA、CA 级智能网联汽车渗透率仅达50%。在智能驾驶汽车全面普及之前,未来的道路交通将由智能驾驶汽车和人工驾驶汽车混合而成,因此在异质交通流情况下,车辆自适应巡航控制要充分考虑人工驾驶汽车对智能驾驶汽车的扰动作用,这对改善交通流特性、提升道路通行能力和驾驶安全性具有重要意义。
面向单车智能的自适应巡航控制系统多采用PID控制、滑模控制、智能控制等方法,而后模型预测控制凭借可实现多目标协调优化、在线处理系统约束等优点,逐渐被广泛应用于自适应巡航控制系统。在运用传统模型预测控制算法设计车辆控制器时,学者们侧重于研究如何通过合理分配权重来协调安全性、经济性、舒适性等多个目标以及如何增加约束来提升算法的鲁棒性。如He 等运用InPA-SQP算法对模型预测控制器进行求解,并采用理想点方法来兼顾自适应巡航控制系统中的多个优化指标,使得模型预测控制器能有效处理不同目标函数权重下的巡航场景;Zhao 等提出了一种实时变权策略,该策略可以根据不同的交通场景调整权值来提高车辆的巡航性能,并结合模型预测控制算法实时调整权值来提高车辆的跟驰性能。
大多数学者在模型预测控制算法中都对前车的加速度采取了简化处理,即认为在预测时域内前车加速度恒定不变,这导致自适应巡航控制器无法控制车辆稳定跟驰。为消除前车运动状态变化对后车自适应巡航控制器的影响,吴光强等提出一种多目标鲁棒跟驰控制算法,建立了考虑前车加速度干扰的自适应巡航系统车间纵向运动学模型,引入修正项反馈提高模型预测控制系统的鲁棒性;何德峰等运用高斯过程回归法对前车加速度进行建模,通过历史加速度值预测下一时刻前车加速度,在线修正模型预测控制算法偏差,以上研究仅适用于智能驾驶汽车同质交通流。针对智能驾驶汽车和人工
根据车辆纵向运动关系建立B、C两车间跟驰模 驾驶汽车混合行驶的异质交通流,Ozkan提出了一种分布式随机模型预测控制方法,运用逆强化学习算法学习人工驾驶汽车驾驶员随机驾驶行为,并结合分布式模型控制策略预测前车运动状态。
考虑到车辆跟驰行驶时前方人工驾驶汽车扰动(急加速、急减速)会对后方智能驾驶汽车控制系统稳定性和安全性造成较大影响,本文中提出了基于改进模型预测控制的车辆自适应巡航控制方法,运用线性二次最优控制算法对前车加速度进行建模并预测,然后将得到前车加速度预测序列用于模型预测控制器中,以期实现基于车车通信的自适应巡航滚动优化控制,提高车辆行驶的安全性和道路通行能力。
1 问题描述与建模
本文侧重于研究车辆自适应巡航控制技术中的决策控制系统,对前期数据感知系统和数据处理系统做理想化假设,即智能驾驶汽车可以通过车联网平台实时获取车辆基本安全信息(basic safety message,BSM)。BSM 信息由车载单元(OBU)收集后向所覆盖区域范围内的车辆OBU 发送,包含车辆位置信息、运动状态参数(速度、加速度)、驾驶行为信息(节气门开度、制动踏板力)等核心信息以及其他可选信息,以上信息根据T/CSAE 53—2017 标准打包成BSM 消息集,并通过专用V2X 无线通信向周围车辆广播。
如图1 所示,在异质交通流场景下,智能驾驶汽车和人工驾驶汽车可通过OBU 采集自车驾驶信息(位置、速度、加速度)并将其发送给其他车辆,人工驾驶汽车只接收不利用其他车辆BSM 信息辅助驾驶。若A车(人工驾驶汽车)随机产生加速或减速等机动行为,B 车(智能驾驶汽车)为维持自车与A 车的安全跟驰车间距立即加速行驶或紧急制动,C 车纵向自适应巡航控制器则需根据B 车改变后的运动状态调整车辆跟驰行驶。设定C 车通过OBU 接收A、B 两车的BSM 信息,C 车纵向自适应巡航控制器根据A 车与B 车的历史运动状态预测下一时刻B 车加速度序列,从而提前预判B 车运动状态,有效降低人工驾驶车辆加速度阶跃变化对智能驾驶汽车纵向巡航控制的影响,提升车辆自适应巡航控制的安全性和跟驰性能。型。定义时刻B车位置、速度、加速度分别为()、()、(),C 车的位置、速度、加速度分别为()、()、()。

图1 基于车联网V2V的协同控制示意图
则两车实际车间距为

两车相对速度为

两车相对加速度为

设自动驾驶汽车期望加速度控制量与实际加速度为1阶惯性环节:

式中:∈{,};()为期望加速度;为1阶惯性环节的增益系数;为惯性环节时间常数。本文设=1,= 0.45。
根据车辆纵向运动学特性可知+ 1 时刻C 车速度、加速度以及与B 车的相对速度、实际车间距计算表达式为

本文采用考虑前车加速度和速度的可变车头时距策略计算期望车间间距,并选用混合交通流中智能驾驶车辆占比40%~70%对应的车头时距期望值作为可变车头时距上下限数值。

两车的期望车间距为

式中:为可变车头时距;(·)为饱和函数;为车头时距下限;为车头时距上限值;为大于0 的常数;为两车相对速度系数;为前车加速度系数;为最小安全间距。本文设= 0.05 s/m,=0.3 sm。
实际车间距和期望车间距的差为

选取两车实际车间距、相对速度、自车速度、自车加速度为状态变量,选取间距差、两车相对速度、自车加速度为输出变量,前车加速度为扰动参数,离散状态方程为


为提高模型预测精度及抗干扰能力,基于闭环反馈校正思想引入误差修正项(),其为时刻系统实际状态与预测状态的差值。

()为时刻系统的实际状态,( |- 1)为1时刻对时刻系统的预测状态。
将式(10)代入式(9),得到矫正后的车辆运动学模型状态方程:
式中:= diag(,,,)为矫正矩阵,其中参数取值范围为(0,1)。
2 汽车运动状态短时预测
传统模型预测控制算法通常将时刻获取的前车加速度()作为预测时域内的扰动序列,即() =(+ 1) = … =(+-)。当B 车急加速或急减速时,若以时刻B车加速度值作为预测时域内B 车加速度,会导致C 车控制器出现较大的计算误差,从而降低了车辆自适应巡航控制系统的跟驰性能。
如图2 所示,根据A、B 两车纵向运动关系建立相对运动状态空间方程。

图2 基于前车加速度预测的改进模型预测控制方法框架

式中:()为A 车与B 车的间距;()为A 车与B 车的相对速度;()为B 车加速度;Δ()为B 车时刻加速度状态改变增量;为采样周期。
基于线性二次最优控制理论建立跟驰状态下的驾驶操纵效用函数。

式中:为对角矩阵;、、分别为Δ()、()、()的权重系数;为安全车间距;为周期起始时刻;t为终止时刻。
构建哈密尔顿函数,并对式(15)求导后得到被控系统的最优反馈控制律Δ()。


矩阵需要满足黎卡提矩阵代数方程:



则B车加速度的预测值为^(+ 1)。


3 车路协同自适应巡航控制
在自适应控制系统的设计过程中,根据跟车纵向运动学模型可以预测在未来时刻内实际的两车间距以及相对速度的大小,将该预测值与期望值进行比较便可求的最优的控制序列。假设当前时刻为,预测时域为,控制时域为,逐步迭代式(11)可得到以下预测状态:

进一步可以得到被控输出:
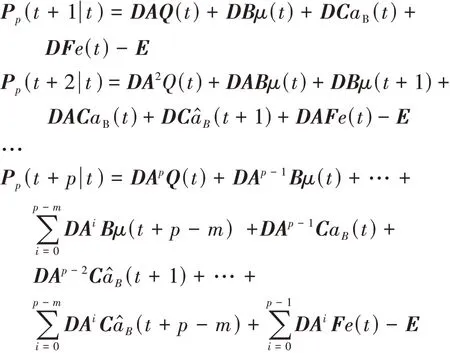
对于系统未来步预测的状态和输出可以简化为如下预测方程:


其他系数矩阵满足:

以加权形式的值函数表示自适应巡航控制系统中所选择的优化性能指标,设定MPC 预测模型的代价函数为J:


考虑到车辆自身物理限制等因素,需要对控制器工作域进行边界约束,从而建立如下硬约束条件:

式中:=[Δ(),Δ(),a()]表示系统输出下界;=[Δ(),Δ(),a()]表示系统输出上界;表示可容许控制输入下界;表示可容许控制输入上界;Δ表示可容许控制输入增量下界;Δ表示可容许控制输入增量上界。
在预测时域[,+-]范围内,系统满足如式(24)所示的条件:


瞬态工况下,硬约束条件易致滚动优化过程中无可行解问题,故引入松弛向量对硬约束条件进行松弛化,以扩展求解可行域。


将松弛变量作为惩罚函数加入到原有的目标函数式(22)中可得到新的优化目标函数,通过简易的变换,本文将带约束的模型预测控制优化的问题转化为二次型问题进行求解,整理后得到的二次型表达式见式(26)。


对时刻的状态进行优化求解,得到一串预测序列:

下一采样时刻,预测时域向前移动一步,并重复上述过程,从而实现自适应巡航滚动在线控制。
4 实验与分析
4.1 实验设计
本文基于Carsim/Simulink 联合仿真平台对混合异质车流条件下的车辆跟驰行为进行了模拟,并验证了人工驾驶汽车扰动影响下汽车协同自适应巡航控制方法的有效性。
如图3所示,在跟驰仿真场景中一共设置了3辆车,A 车为人工扰动汽车(自定义设置车辆运动状态),B车为智能驾驶汽车的头车,C车为被控智能汽车(分别搭载传统模型预测控制器和改进模型预测控制器)。设置A、B、C 3车的初始运动状态为{[距离起点位置(m),速度(m/s),加速度(m/s)]/[40,16.7,0],[20,16.7,0],[0,16.7,0]}。A车在仿真工况下按照设定速度变化曲线依次进行匀加速-匀速-匀减速-急减速运动,B 车和C 车依次跟驰前车行驶。

图3 实验设计
车辆动力学约束和仿真参数设置如表1所示。

表1 车辆动力学约束与仿真参数
4.2 仿真结果分析
在A 车的扰动作用下B 车和C 车的车辆运动状态如图4 所示。由图4(a)可知,第0-60 s B 车匀加速行驶,改进MPC 控制器提前预测B 车加速度变化且以相同的加速度加速行驶,传统MPC 控制器在B车加速初期呈现先减速再加速的运动状态;第60-110 s B 车匀速行驶,两种控制器都能控制C 车与B车保持相同速度行驶,但传统MPC 控制器比改进MPC 控制器晚18 s 进入匀速行驶阶段;第110-150 s B 车匀减速,改进MPC 控制器预测到B 车减速度变化,相对于传统MPC控制器提前跟随B车减速行驶;第150-160 s B 车紧急制动,B 车在第160 s 时停止,此时传统MPC 控制器的车速为3 m/s,改进MPC 控制器的车速为9 m/s。综上所述,相比于传统MPC控制器,改进MPC 控制器能在各种工况下更快响应B车运动状态变化,在车辆跟驰过程中迅速跟随前车改变本车运动状态。
由图4(b)可知,第0-60 s B 车匀加速行驶,改进MPC 控制器控制车辆与B 车的相对速度在-0.4-0.15 m/s 之内,传统MPC 控制器与B 车的相对速度控制在0-5.2 m/s 之内且在前车速度变化初期呈现较大的相对速度差;第60-110 s B 车匀速行驶,改进MPC 控制器和传统MPC 控制器都能控制车辆与前车保持相对静止,即车辆的运行速度保持一致;第110-150 s B 车匀减速,改进MPC 控制器与前车的相对速度基本维持在0,传统MPC 控制器与前车的相对速度控制在-1-0 m/s 之内;第150-160 s B 车紧急制动,改进MPC 控制器控制车辆与前车的相对速度在-3-0 m/s 之内,而传统MPC 控制器与前车的相对速度控制在-9-0 m/s 之内。综上所述,相比于传统MPC 控制器,改进后的MPC 控制器能控制车辆在前车速度发生变化时更迅速做出响应,使自车能与前车保持相对稳定的速度跟驰前车。

图4 仿真结果图
由图4(c)可知,改进MPC控制器与传统MPC控制器都能控制车辆安全跟驰前车,采用改进MPC 控制器的车辆在车辆跟驰过程中更贴近前车运动轨迹,即保持更好的车辆跟驰性能。
由图4(d)可知,第0-60 s B 车匀加速行驶,改进MPC 控制器与B车的跟驰间距随着速度变化小幅度增加,跟驰间距控制在20-30 m之内,传统MPC控制器与B 车的跟驰间距随速度增加不断增加,跟驰间距控制在20-110 m之内;第60-110 s B车匀速行驶,改进MPC 控制器以恒定车间距30 m 稳定行驶,传统MPC 控制器以恒定车间距110 m 稳定行驶;第110-150 s B 车匀减速,改进MPC 控制器的跟驰间距变化区间控制在25-30 m 之内,传统MPC 控制器跟驰间距变化区间控制在85-110 m之内;第150-160 s B车紧急制动,改进MPC 控制器与前车的跟驰间距逐渐减少,最终在距离B 车12 m 时安全停止,传统MPC控制器与B 车的跟驰间距急剧减少,最终在距离B车18 m 时安全停止。综上所述,相对于传统MPC 控制器,改进MPC 控制器能够控制车辆在各种工况下与前车保持更小的安全间距行驶,大大提升了道路通行能力。
5 结论
本文中考虑人工驾驶汽车的扰动作用对混合车流自适应巡航控制的影响,提出了基于改进模型预测的自适应巡航控制方法,研究了被控车辆在加速、匀速、减速和急减速等联合工况下的跟驰控制性能。研究结果表明:
(1)在智能驾驶汽车和人工驾驶汽车混合行驶的车流环境下,人工驾驶汽车不确定的运动状态会对周边智能驾驶汽车造成干扰,导致被控车辆的前车加速度无法准确测量。当前车运动状态发生变化后,被控汽车为了跟驰前车会出现较大的速度波动,且车辆跟驰间距随着前车车速的加减发生较大变化,不利于车辆在混合车辆中安全行驶。
(2)相较于传统模型预测控制算法将预测时域内的前车加速度假定为初始采样时刻值,本文提出的方法实现了对扰动作用下的前车加速度序列的短时预测,从而优化传统的模型预测控制算法,使得改进后的车辆控制器能更迅速调整车辆运动状态,减少车速波动范围和跟驰间距,提升了道路通行能力和车辆自适应巡航控制系统的跟驰性和安全性。本文的研究成果可以为智能化网联道路混合异质车流的管理、决策和控制提供理论依据和技术支撑。