BDS辅助无人机免像控三角测量数据处理方法研究
2022-09-04凡艳伟马成
凡艳伟,马成
( 青海省基础测绘院, 西宁 810001 )
0 引 言
航空摄影技术能快速获取城市区域的多视影像数据,结合全球卫星导航系统(GNSS)技术获取摄影时刻摄站位置,利用GPS辅助空中三角测量技术进行航测数据处理,能减少外业控制点数据,有效地缩短作业周期,提高生成效率[1]. 该技术广泛应用在地籍测量[2]、城市实景三维构建[3]、地理国情监测[4]以及矿山环境修复[5]等领域.
由于传统无人机摄影测量平台在飞行中存在姿态不稳定、受高空气流影响较大,需要利用已知坐标系统的外业控制点对获取的多视影像数据进行处理,以获取大区域、高精度测绘产品. 姜丙波等[6-7]在测区内部选取分布均匀控制点,通过在立体模型下测量控制点的像点坐标,以提高空中三角测量成果精度,该方法对作业人员经验要求较高,需要具有较好的专业知识. 目前,关于控制点分布、数量对空中三角测量成果精度影响等方面研究较少,作业过程中往往需要通过多次试验以获取满足规范要求的空中三角测量成果精度. 为了减少外业控制点采集的工作量,袁修孝等[8]提出采用GPS精密单点定位(PPP)技术获取摄站坐标,并利用摄站坐标进行光束法区域网平差,试验结果表明成果满足精度要求,而后袁修孝等[9]提出采用GPS数据辅助空中三角测量处理低空无人机影像数据,通过实验对比验证该方法与采用外业控制点进行空中三角测量处理精度一致. 石平等[10]提出利用惯性测量单元(IMU)/GPS数据辅助航空摄影测量技术,分析控制点不同布设方案下IMU/GPS辅助空中三角测量对生成数字高程模型/数字表面模型(DOM/DSM)的精度影响. 张春森等[11]针对无人机飞行过程中速度不一致,采用传统的GPS光束法平差算法导致平差结果难以达到理论值,提出引入曝光延迟模型的GPS光束法区域网平差方法. 上述方法,均采用GPS数据进行光束法区域网平差方法以减少采集外业控制点工作量,提高作业效率. 我国北斗三号卫星导航系统(BDS-3)在2020年已经完成全面星座部署,文献[12]研究表明BDS静态PPP定位精度优于分米级,与GPS精度相当,完全满足航空摄影测量的需求.
鉴于此,本文提出BDS辅助无人机大比例尺免像控的精度验证方法,通过搭载多模态接收机获取相机曝光时刻摄站坐标,利用动态差分定位技术处理BDS数据,并将其引入光束法区域网平差处理过程中,以探讨BDS辅助无人机大比例尺免像控成果精度,拓展BDS数据的应用场景,为大比例尺测图提供一种思路.
1 BDS辅助无人机大比例尺免像空原理
北斗卫星导航系统(BDS)辅助无人机空中三角测量基本原理是利用无人机上搭载的双频BDS接收机获取航拍时刻的北斗卫星观测数据. 当相机曝光时,将相机曝光的脉冲信号记录在北斗接收机上,标记相机曝光时间,在后期数据处理时,通过内插方法获取每张影像曝光时刻对应的摄站坐标,并将该值作为影像的观测值带入光束法区域网平差中,以减少外业控制点测量工作,提高影像的定位精度. 主要涉及高精度的BDS摄站坐标解算、BDS数据与无人机影像数据联合平差两部分关键技术.
1.1 摄站坐标BDS差分计算
BDS由三个频率载波信号,包括载波、测距码以及导航电文三部分. 其中B1、B2为对公共开放数据,B3为授权用户信号,BDS双频伪距与载波观测方程可以表示为
式中:Pi为伪距观测值;Li为相位观测值; ρ 为BDS卫星与地面接收机的距离;c为光速; drr为接收机r的钟差; dts为卫星s的钟差;dtrop为卫星信号在对流层的延迟参数;dioni为电离层延迟参数; λi为卫星信号载波波长;Ni为载波相位整周模糊度;为接收机r的观测改正量;为s卫星观测改正量; εPi为伪距测距、 εLi为载波相位噪声与多路径综合误差值.
通过观测值的双差组合可以消除卫星星钟/接收机与卫星伪距/接收机/相位偏差,减弱对流层延迟与电离层延迟误差影响,文中采用接收BDS接收机的B1、B2频率的观测数据,利用差分动态定位技术计算,载波相位观测值的一阶差分观测方程可以表示为
BDS一阶差分定位随机模型

为了进行BDS与GPS多模态多星组合定位模型,对双差函数模型和随机模型进行优化改写为:
在卫星信号弱或失锁情况下,导致影像定位精度急速下降. 若利用多星多模态的GNSS接收机同时接收BDS、GPS信号便可以获取较多的导航卫星观测数据,在GPS或BDS等单一卫星信号缺少情况下可以有效地提高数据的定位精度. 文献[13]相关研究表明,通过GPS/BDS 组合导航定位提高卫星的观测数据,改善位置精度因子(PDOP)的定位精度.
BDS/GPS辅助空中三角测量需要摄站空间坐标,可以由GNSS获取的观测历元解算获取. 为了确保不同卫星系统同步,直接使用一个常数来统一时间基准偏差. 利用曝光时刻前后8个历元的GNSS位置数据通过拉格朗日二次多项式拟合的方法,计算无人机相机曝光时刻摄站的三维空间坐标,确保两者的统一.
1.2 BDS组合辅助光束法平差模型
GPS/BDS组合辅助光束法平差能有效地避免单一卫星导航系统失锁下导致定位精度较差,通过GNSS获取无人机拍摄影像时刻的摄站坐标,依据共线方程基本原理,利用无人机镜头曝光时刻影像姿态、位置信息进行区域网平差处理,解算影像精确的姿态、位置信息,具体平差模型为
影像的像点位置、摄影中心、影像地面物方坐标对于的空间几何关系,可以采用共线方程表示确定
式中:x0、y0、f为影像标定参数; (x,y) 为影像的像点坐标; (X,Y,Z) 为影像像点坐标对应的物方点坐标;ai,bi,ci,i=1,2,3为矩阵R的元素.
在航线拐弯时,容易出现卫星信号失锁,导致定位精度急速下降. 通过搭载多模多星GNSS接收机,同时接收BDS、GPS信号,能够为GNSS辅助光束法区域网平差提供更多的导航卫星观测数据,有效地改善单一卫星信息失锁下定位精度急剧下降问题. 利用影像自动匹配算法提取多视影像上的像点坐标以及多模接收机获取的BDS摄站坐标作为观测值,在相机标定参数已知情况下,以影像外方位元素、连接点物方坐标、BDS天线偏心参数、相机曝光时刻改正量等作为未知参数,对式(6)~(7)进行线性化获得误差方程. 利用连接点、GNSS卫星信息逐点构建法方程,采用最小二乘算法解算连接点的物方空间坐标以及高精度的影像外方位元素.
2 实例分析
本文采取无人机搭载主距为20 mm 的索尼QX1数码相机,同时搭载可以接收BDS、GPS信号的GNSS接收机,GNSS接收机与相机热靴信号相连接获取相机曝光时刻的脉冲信息并记录. 实验区域为东西长约6.8 m、南北宽约5.2 m的平原密集建筑物类型. 采用后差分商业软件GrafNav解算差分GNSS数据,以获取摄影时刻影像定位参数. 通过Photo-Scan软件的AT模块利用深度学习中影像匹配最新理论和多视几何原理解决BDS辅助空中三角测量中像点量测与联合平差等问题,测试BDS辅助无人机大比例尺无控测图的可行性.
2.1 航测流程
利用BDS辅助无人机摄影测量系统进行大比例尺免像控精度验证,主要分为采用摄影测量系统获取影像数据阶段、利用影像数据及对应的辅助数据进行BDS辅助的光束法区域网平差精化定向参数阶段以及空中三角测量处理后精度验证阶段,基本流程如图1所示.
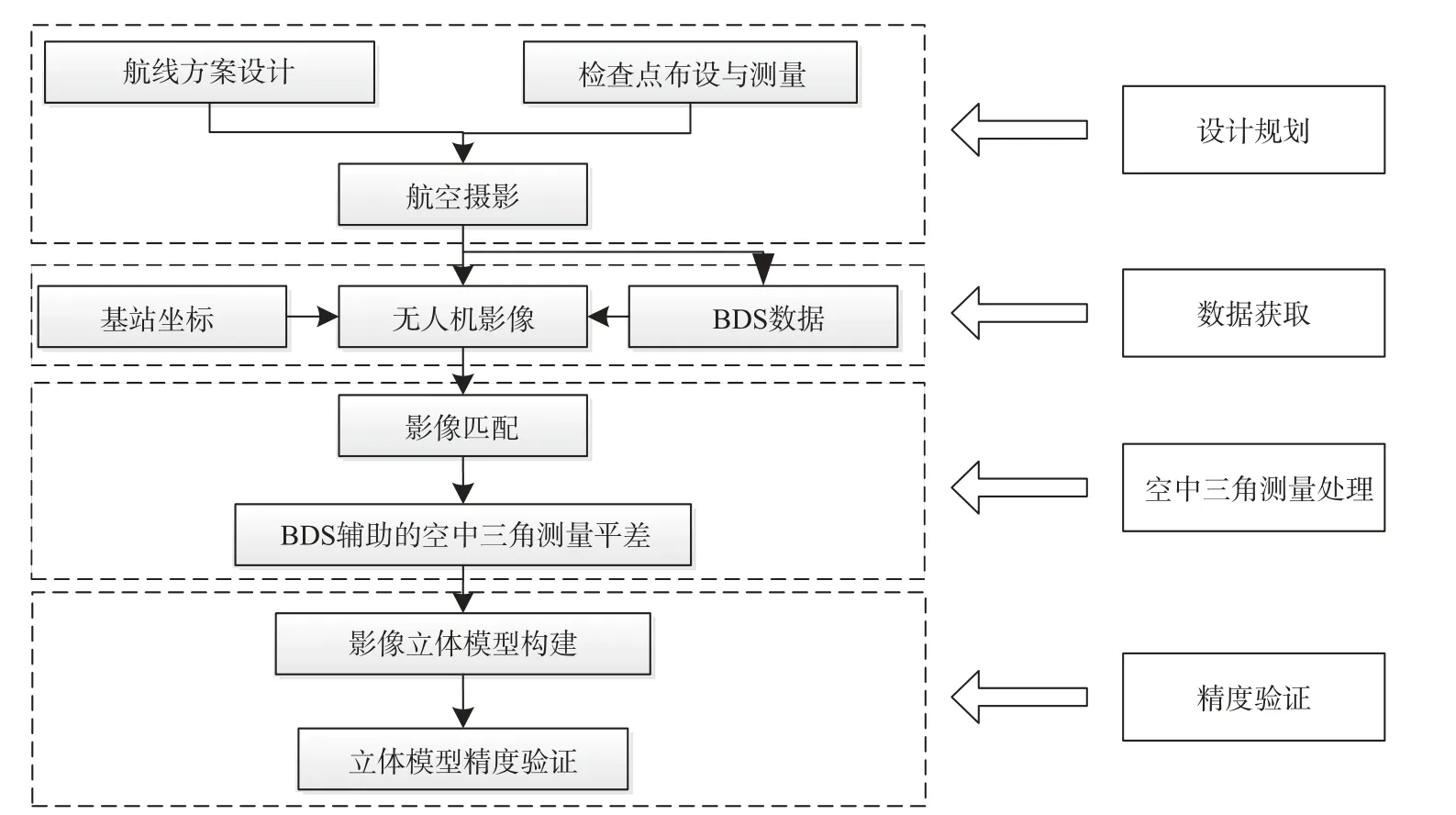
图 1 数据处理流程
2.2 飞行航线设计
根据测区概况,采用飞马智航线软件进行航线规划和飞行参数设计,利用软件自带的仿地飞行模式进行飞行,以确保整个测区影像地面分辨率差别较小.航线飞行参数设置如下:地面采样分辨率为5 cm,航向/旁向均为重叠80%,航高为268 m,共飞行14架次,获取27 972张影像,将飞马智航线软件生成的航线规划图导入奥维地图中,如图2所示.

图 2 仿地飞行方案
无人机摄影测量系统上集成高精度定位、定姿设备,在获取影像时能够获取对应时刻的位置和姿态信息即每张影像的外方位元素,通过后期引入曝光延迟模型的光束法区域网平差方法精确获取影像的外方位信息,因此可在架设基准站的情况下获取影像数据而无需单独在布设外业像控点.
2.3 BDS辅助空中三角测量计算及精度分析
通过影像初始定位参数计算影像的仿射变换参数,利用仿射变换参数对特征点进行局部纠正并提取局部区域的描述子;然后,计算特征点的最近邻与次近邻的比值,通过与给定的经验阈值进行比较确定初始同名点坐标;最后,采用极限约束、最小二乘匹配、对应矩阵等多种约束策略剔除初始同名点存在的粗差点,以获取精确同名点坐标. 针对无人机飞行过程中可能存在卫星信息失锁现象,采用传统的GPS辅助空中三角测量精度存在急剧下降现象,本文选用BDS辅助的光束法区域网平差方法. 首先,利用影像匹配算法提取高精度的连接点坐标进行自由网平差处理,以确保整个测区误差一致;然后,引入BDS/GPS多模的GNSS数据进行区域网平差处理,通过最小二乘平差算法解算每张影像的内、外方位元素改正量以及连接点物方坐标,提升影像整体定位精度,避免因单星失锁导致影像定位精度急剧下降现象,保证后续自动生成DSM精度. 为了验证BDS辅助光束法区域网平差的精度,在实验区域内选取34个均匀分布的特征点作为精度检查点. 检查点坐标通过GNSS-实时动态(RTK)设备测量,测量结果采用CGCS-2000坐标系,高程基准采用大地高,将BDS辅助空中三角测量处理后坐标与检查点外业测量结果进行对比,统计X、Y、高程方向中误差. 空中三角测量加密成果分布如图3所示,空中三角测量后的统计精度如表1所示.
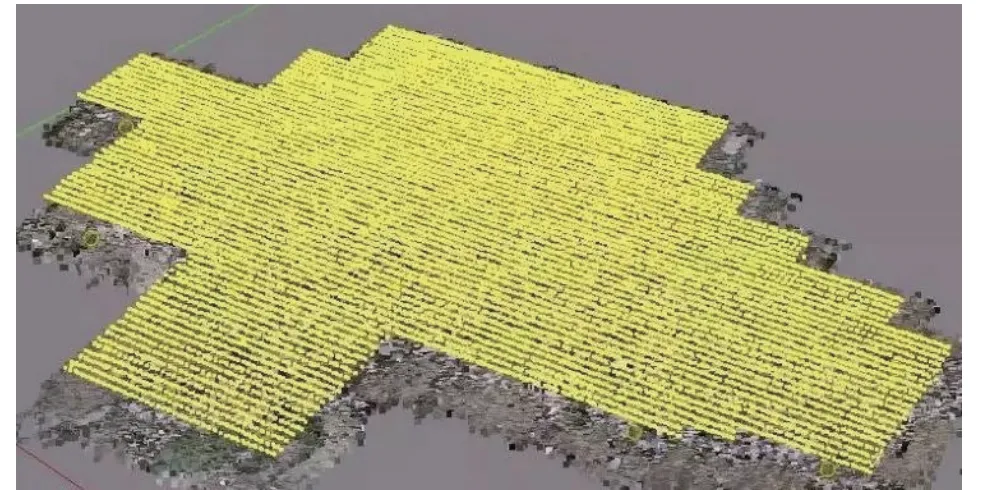
图 3 空中三角测量加密成果分布图
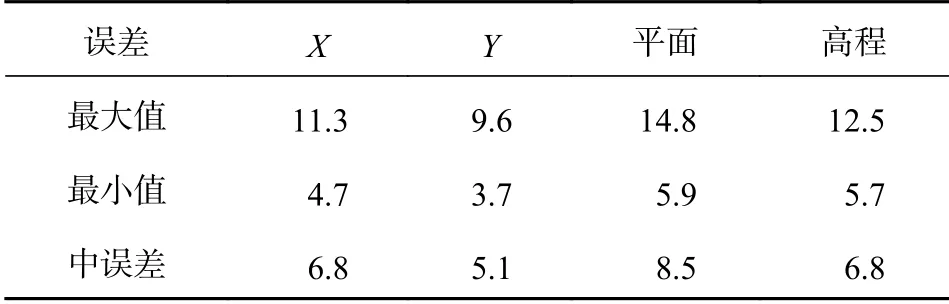
表 1 空中三角测量精度统计表 cm
由表1空中三角测量精度统计报告可知:利用商业软件GrafNav解算差分BDS/GPS数据获取高精度的物方空间坐标,采用PhotoScan软件的AT模块进行BDS数据辅助的光束法区域网平差处理,平差处理后的精度优于1∶500比例尺《低空数字航空摄影测量内业规范》规定要求,34个检查点的最大平面误差为14.8 cm,最大高程误差为12.5 cm;平面中误差为8.5 cm优于规定的17.5 cm,高程中误差为6.8 cm优于规定的28 cm,空中三角测量成果精度满足大比例尺1∶500测绘应用需求.
2.4 立体模型精度验证
为了后期生成三维模型精度满足要求,采用空中三角测量后的影像外方位元素构建测区的立体模型.在立体模型上测量特征点与典型地物的目标值,通过外业采用高精度的全站仪量测对应目标的值,将两套坐标进行比较分析,统计空中三角测量后立体模型精度. 利用在立体模型上量测42个检测点和25个典型地物边长与外业测量的值进行差值计算,表2为统计平差后立体模型绝对定位精度,表3为立体模型内相对定位精度,表中仅显示不同数字坐标.
由表2绝对定位精度可知:BDS数据辅助空中三角测量处理后,通过高精度影像外方位元素恢复立体模型的绝对定位精度,平面中误差为10.5 cm,高程中误差为13.2 cm,能够满足后期制作1∶500大比例尺测图需求.
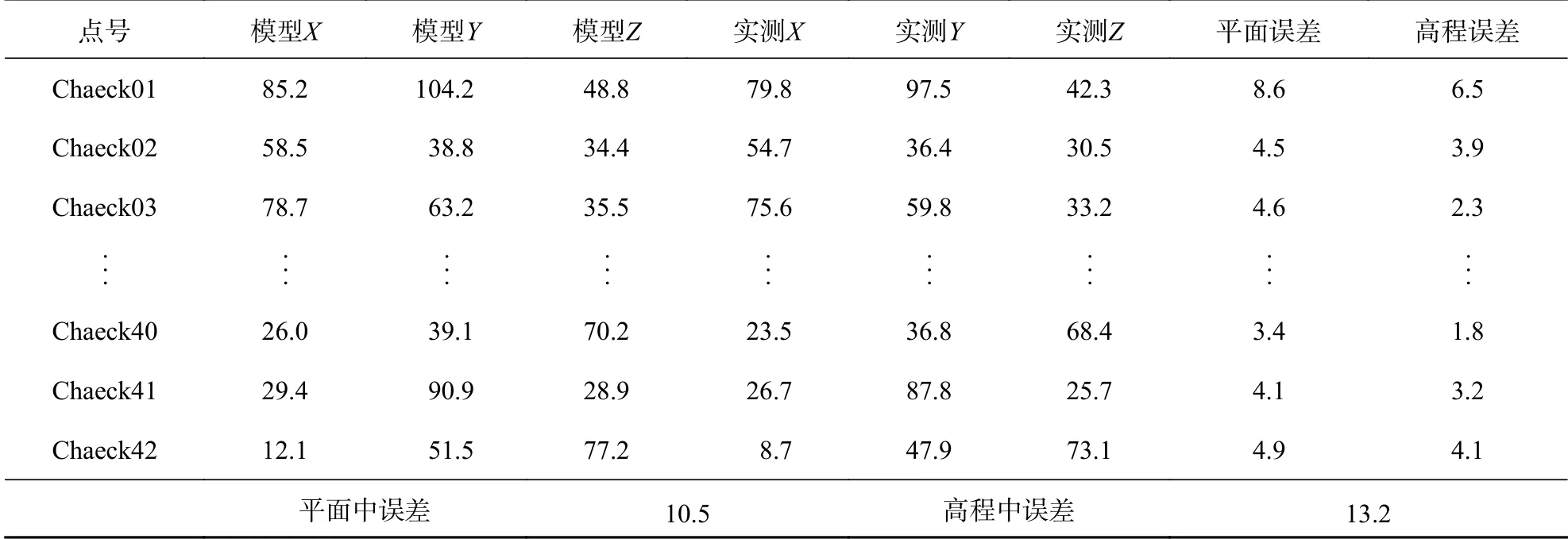
表 2 绝对定位精度 cm
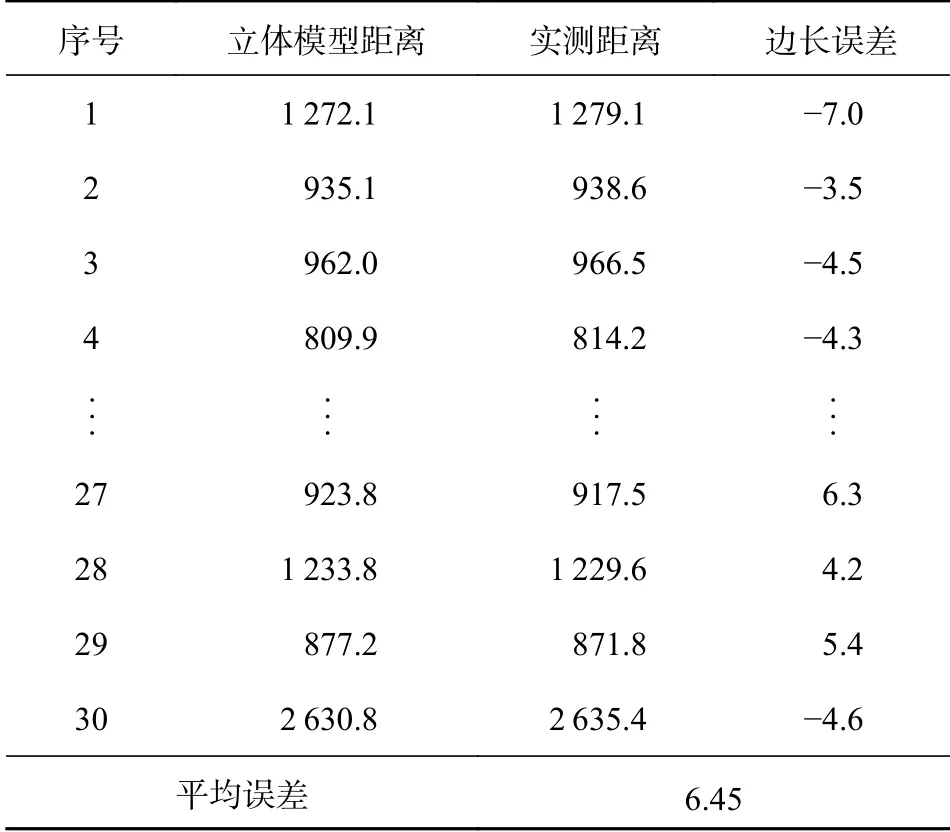
表 3 相对定位精度统计 cm
由表3边长误差统计可知:利用量测立体模型上典型物体的边长计算模型相对定位精度,30个边长的相对中误差为6.45 cm,边长误差整体分布一致性较好均优于分米,没有出现过大误差,达到1∶500的大比例尺测图需求.
3 结束语
针对BDS几何覆盖良好,但在航空摄影测量应用研究较少,文中通过将差分处理后的BDS数据引入光束法区域网平差,实现BDS辅助光束法区域网平差. 通过工程实验分析,采用BDS差分动态模式技术计算摄影时刻的摄站坐标,并将该坐标引入光束法区域网平差过程中. 实验结果表明:该方法能够满足1∶500大比例尺测图需求,说明BDS辅助空中三角测量的可行性,为后续BDS数据在航空摄影测量方向应用提供一种思路.
