增强辛几何模态分解和自组织自编码卷积网络的电机轴承工况识别
2022-09-03陈志刚杜小磊王衍学
陈志刚,杜小磊,王衍学
(1.北京建筑大学机电与车辆工程学院,北京 100044;2.北京市建筑安全监测工程技术研究中心,北京 100044;3.电子科技大学机械与电气工程学院,四川成都 611731;4.城市轨道交通车辆服役性能保障北京市重点实验室,北京 100044)
引 言
滚动轴承是电机的重要部件,较容易受到损伤而出现故障,进而影响整个电机的性能[1]。目前,基于振动信号的电机轴承工况识别研究最为广泛,一方面,由于电机轴承振动信号传递路径较复杂,信号呈现出明显的非线性和非平稳性;另一方面,振动信号易受环境噪声干扰,信噪比较低。
深层自编码器(Deep Auto⁃Encoder,DAE)[2]能自动从信号中学习有价值的特征,克服了“人工特征提取⁃特征选择⁃工况识别”方法的缺陷[3],在电机轴承工况识别领域取得了一定突破。Shao 等[4]结合多种DAE,对电机轴承多种工况进行了有效识别;Shao 等[5]提出集成DAE,采用多种不同的激活函数,使电机轴承工况识别结果更稳定。虽然上述基于DAE 的电机轴承工况识别研究取得了一定成果,但仍存在如下缺陷:(1)DAE 训练过程中结构固定不变,仅更新网络权值,难以有效处理非线性和非平稳性振动信号[6];(2)DAE 为全连接网络,训练参数众多,训练时间较长[7];(3)众多研究[8⁃10]表明,若直接将含噪信号输入DAE,噪声的存在不仅会降低工况识别准确率,还会降低DAE 的收敛速度。在信号降噪方法中,小波降噪缺乏自适应性;经验模态分解及其变体[11⁃13]等降噪方法存在模态混叠现象;变分模态分解[14]和经验小波变换[15]的分解模态个数难以确定;辛几何模态分解(Symplectic Geometry Mode Decomposition,SGMD)[16]能有效保持时间序列的本质特征,适合电机轴承振动信号的分析。程正阳等[17]将SGMD 应用于齿轮工况识别分析;郑直等[18]利用SGMD 分解液压泵振动信号,并利用广义形态分形维数对泵的工况进行识别。尽管SGMD 取得一定成效,但辛几何分量选取困难。
本文在SGMD 基础上采用改进凝聚聚类算法对初始辛几何模态分量进行有效重组,并提出新的综合评价指标筛选有效的模态分量进行重构,最后结合SOAECN 进行电机轴承工况识别,试验验证了ESGMD⁃SOAECN 方法的可行性和有效性。
1 增强辛几何模态分解
1.1 辛几何模态分解
设信号x=x1,x2,…,xn,根据Takens 嵌入定理[19],将x投影到轨迹矩阵X,如下式所示:

式中d为嵌入维度;m=n-(d-1);τ为延迟时间,τ的确定采用C⁃C 算法[20]。对X进行自相关分析,得协方差对称矩阵A:

然后构造哈密顿矩阵M:

则N=M2也为哈密顿矩阵,进而构造辛正交矩阵Q:

式中R为矩阵变换后的子矩阵;B为上三角矩阵,其特征值分别为λ1,λ2,λ3,…,λd,则A的特征值为:

式中σi的分布为A的辛几何谱,Qi(i=1,2,…,d)为σi的特征向量,则各分量矩阵的重构步骤如下:
首先,计算变换系数矩阵:

然后,对Si进行变换,得到单分量成分Zi:

式中i=1,2,…,d。则初始单分量轨迹矩阵Z如下式所示:

式中Z∈Rm×d。定义Zi中元素为zij,1≤i≤d,1≤j≤m,且d*=min(m,d),m*=max(m,d),n=m+(d-1)τ,令:

则对角平均转换矩阵可由下式得到:

通过对角平均可将矩阵Z变换为d×n维的矩阵Y,从而将信号x分解为d个具有不同趋势项和不同频带的初始辛几何模态分量(Initial Symplectic Geometric Mode Components,ISGMCs):

1.2 改进凝聚聚类算法
在聚类算法中,层次聚类和凝聚聚类会增加算法的复杂度,因此本文利用改进凝聚聚类算法减小计算量。用改进凝聚聚类对Y1,Y2,…,Yd进行分析与重组,将每个Yi视作元素ti=(Yi),记T=(t1,t2,…,td),则集合T中ti和tj的综合距离计算如下:

其中,dk可通过最短距离法、最长距离法或平均距离法计算得到。则ti和tj的综合相似度s计算如下:

本文采用结构体数组记录数据的初始位置及相似度s,相似度阈值根据文献[21]和经反复实验取为0.85,改进凝聚聚类算法步骤如下:
(1)计算T中任意2 个元素ti和tj的相似度s(ti,tj),存储在数组S中。
(2)对数组S从大到小进行排序。
(3)判断数组S中的2 个元素是否合并为一类,若否,则合为一类;若1 个元素已被合并到某一类,则另一元素也合并到此类;若2 个元素被合并到两个不同的类,则两类合并为一类。
(4)取S中下一个元素,重复步骤(3),直到S中所有元素处理完毕。最终得到:

式中q为聚类组数;Y∗i为聚类辛几何模态分量(Clustering Symplectic Geometric Modal Compo⁃nent,CSGMC)。
1.3 综合评价指标
峭度对冲击信号敏感,但忽略了轴承振动信号的循环平稳性。为更有效地保留信号的故障冲击信息,提出一种综合评价指标Q用于CSGMCs 有效分量的选取,Q的表达式如下:

式中 0<η1,η2<1 为比例系数,η1+η2=1。Kw为加权峭度,综合考虑峭度和相关系数两个指标,定义如下:

式中分别为相应的x,y的平均值;K为信号x的峭度;N为信号x的长度;C为信号x和y之间的相关系数,在本文中指各CSGMCs 与原始信号之间的相关系数。
Kc为合成峭度,综合考虑峭度和包络谱的优势,定义如下:

式中 右边第1 项为包络幅值峭度;se为信号包络谱;p表示包络谱采样点数。η1和η2的确定采用粒子群优化算法[22],并根据文献[16,23],选择Q值最大的前4 个分量进行重构。
1.4 仿真实验
为验证ESGMD 的分解效果,进行仿真信号分析,设仿真信号f(t)由3个分量叠加而成,如下式所示:
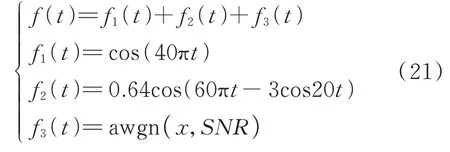
式中f1(t)为余弦信号;f2(t)为调频信号;f3(t)为高斯白噪声函数;SNR为信噪比,本节取10 dB。分别采用ESGMD 和SGMD 对f(t)进行分解,如图1~2所示。根据综合评价指标大小,选取图1中的CSGMC1 和CSGMC2 和图2中的SGMC1~SGMC 4 分量进行重构分析,其重构后的时频谱与原信号的HHT 时频谱如图3~5 所示。

图1 ESGMD 分解结果Fig.1 The decomposition results of ESGMD

图2 SGMD 分解结果Fig.2 The decomposition results of SGMD

图3 原信号HHT 时频谱Fig.3 HHT time-frequency spectrum of raw signal

图4 SGMD 时频谱Fig.4 SGMD time-frequency spectrum
由图1和2 可知,ESGMD 的分解模态数明显少于SGMD 方法。由图3~5 可知,HHT 产生了严重的模态混叠现象,ESGMD 方法分解出的ESGMD1 和ESGMD2分量分别对应于f1(t)和f2(t),没有出现模态混叠现象,仿真结果表明ESGMD 相比于SGMD 能较为准确地分解仿真信号,对噪声鲁棒性较强。
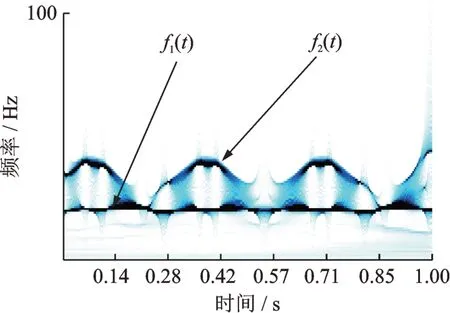
图5 ESGMD 时频谱Fig.5 ESGMD time-frequency spectrum
2 自组织自编码卷积网络
2.1 自编码卷积网络
小波自编码器(wavelet auto⁃encoder,WAE)[3]既具有无监督特征学习能力,又具备小波函数时频聚焦特性,但其为全连接网络,训练速度慢;而CNN[24]具有稀疏连接性质,可有效减少网络间的连接。因此本文将WAE 和CNN 结合,构造自编码卷积网络(Auto⁃Encoder Convolution Network,AECN),如图6所示。
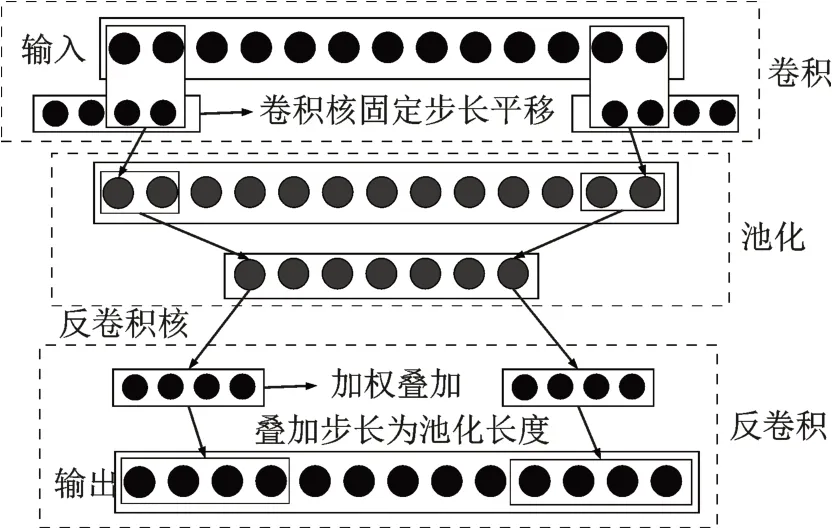
图6 AECN 结构Fig.6 The structure of AECN
设输入x,则AECN 隐层第k个节点输出如下:

式中ψ为高斯小波;Wk为卷积核权重;ak和ck分别为隐层小波节点的尺度向量和平移向量;*为卷积符号;./为按元素相除符号。重构信号如下:

式中L为隐层节点个数;为反卷积核权重矩阵转置;b为偏置。
2.2 自组织策略
首先,将AECN 的隐层节点激活值作为节点“贡献度”,并根据“贡献度”大小对节点进行增加或删减;其次,在微调阶段,当损失函数梯度下降率首次出现递减时删掉一个隐层,否则增加一个隐层,激活强度计算如下:

式中α>0 为常数;oi.l为第l个隐层的第i个节点的输出;Nl为第l个隐层节点个数;si.l为第l个隐层的第i个节点的输入权值之和,如下式所示:

式中ni为神经元的个数;rij为第i个节点的第j个输入;wij为第j个节点和第i个节点的连接权重。自组织策略流程如图7所示。

图7 自组织策略Fig.7 The self-organizing strategy
2.3 改进损失函数
AECN 的均方损失函数如下:

式中xi为输入样本;yi为重构样本;N为样本数目。
为提高AECN 的特征提取性能,在式(28)的基础上加入一阶和二阶收缩惩罚项。一阶和二阶收缩惩罚项的计算分别如下:

均方损失函数使AECN 的重构误差尽量小,一阶和二阶收缩惩罚项使AECN 对输入的扰动具有一定的不变性。同时,为使AECN 学习的隐层特征对输入信号的结构变化具有可分辨性,增加可分辨惩罚项,计算如下:

式中hn为AECN 的隐层特征;Nk为工况Ck的样本数,L为工况类别数;Tr()为取矩阵的迹操作。综上,AECN 的损失函数如下:

式中β,η和λ分别为一阶收缩惩罚项系数、二阶收缩惩罚项系数和可分辨惩罚项系数。采用文献[25]的小批量随机梯度下降算法,AECN 各参数更新公式如下式所示:

式中ik∈{1,2,…,n},Bk和ηk分别为第k次参数更新过程中的序号、样本数量和学习率。综上,提出方法流程如图8所示,详细步骤如下:

图8 ESGMD-SOAECN 算法流程Fig.8 The algorithm flow of ESGMD-SOAECN
(1)采集电机轴承振动信号样本,并划分为训练样本和测试样本;
(2)对样本进行ESGMD 分解,利用综合评价指标Q选择特征信息明显的4 个分量并重构;
(3)将重构后的训练样本输入SOAECN 进行无监督预训练和有监督微调训练;
(4)使用测试样本对训练好的网络进行测试。
3 实验验证
3.1 数据描述
为验证ESGMD⁃SOAECN 的有效性,采用如图9所示的实验台进行验证。

图9 电机轴承实验台Fig.9 The test bench of motor bearing
实验台由感应电机、电机速度控制器、加载系统等组成,加速度计位于被测轴承外壳上,采样频率为25.6 kHz。使用电火花技术在轴承内圈、外圈和滚动体上加工尺寸为0.15 和0.32 mm 的环槽损伤。参考文献[26⁃28]的工况设置方法,选取11 种工况进行研究,如表1所示。每种工况8000 个样本,每个样本1024 个采样点。相应的时域波形图、频谱图及包络谱图分别如图10~12 所示。由图可知,信号受噪声干扰严重,直接从时域图、频谱图及包络谱图中完全区分电机轴承运行工况类别及故障工况程度较难。

表1 电机轴承11 种工况Tab.1 Eleven working conditions of motor bearings

图10 电机轴承振动信号时域波形Fig.10 Time-domain waveform of vibration signals of motor bearing

图11 电机轴承振动信号频谱图Fig.11 Spectrum of vibration signals of motor bearing

图12 电机轴承振动信号包络谱图Fig.12 Envelope spectrum of vibration signals of motor bearing
3.2 实际信号分解
以表1中工况c 信号为例,其时频谱图如图13所示。
由图13 可知,原始信号时频谱模态混叠严重,时频谱杂乱,然后分别采用ESGMD 和SGMD 对其进行分解,如图14 和15 所示。
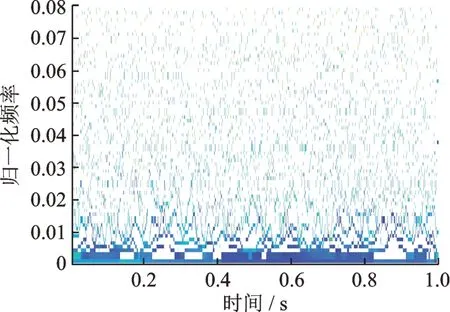
图13 原始信号时频谱Fig.13 Time-frequency spectrum of raw signals
由图14 和15 可知,ESGMD 分解模态数少于SGMD。并根据综合评价指标Q选择较大的4 个分量进行重构,对重构后的信号进行相应的时频变换,分别如图16 和17 所示。

图14 ESGMD 分解结果Fig.14 The decomposition results of ESGMD
由下式求得轴承外圈故障特征频率约107.89 Hz。

式中d为滚子直径;D为节圆直径;α为接触角;Z为滚子数;fr=35 Hz 为转频。
图17 中SGMD 时频谱,时频谱线仍然杂乱,故障特征频率难以分辨;图16 中ESGMD 时频谱脊线较明显,故障特征频率及倍频较清晰,验证了ESGMD 的优越性。
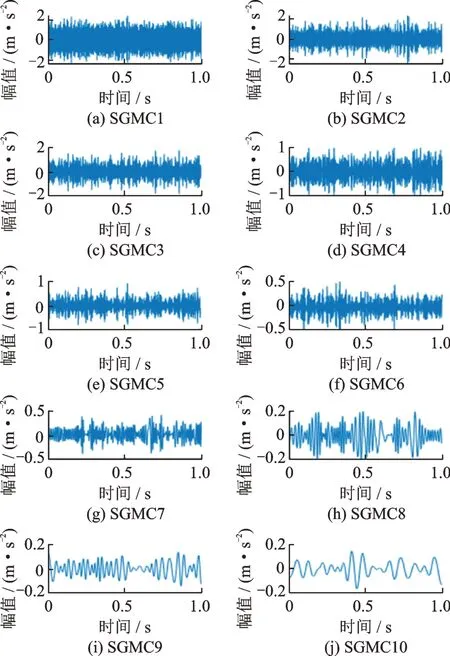
图15 SGMD 分解结果Fig.15 The decomposition results of SGMD

图16 ESGMD 时频谱Fig.16 Time-frequency spectrum of ESGMD
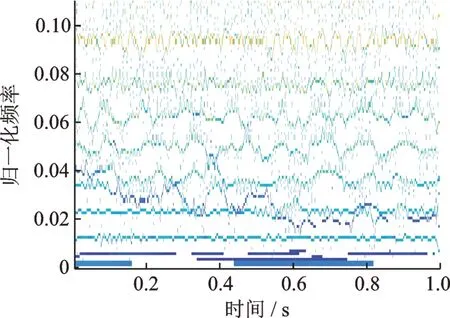
图17 SGMD 时频谱Fig.17 Time-frequency spectrum of SGMD
3.3 不同方法的对比分析
首先验证SOAECN 的效果,采用AE,WAE 和AECN(无自组织策略)进行对比分析。其中,方法1:ESGMD⁃SOAECN;方法2:ESGMD⁃AE;方法3:ESGMD⁃WAE;方法4:ESGMD⁃AECN。SOAECN的初始结构为1024⁃512⁃256⁃128⁃64⁃11;AE,WAE和AECN 的结构均为1024⁃512⁃256⁃128⁃64⁃11。表2列出了不同方法10 次实验的平均工况识别率和训练用时。
由表2可知,本文方法具有更高的工况识别准确率(98.76%)和更小的标准差(0.19);AE 由于均方损失函数易受噪声干扰的缺陷导致识别率较低;WAE 小波函数的时频聚焦特性一定程度上提高了识别准确率;AECN 在WAE 基础上使用了卷积机制,减少了网络所需调整参数,识别准确率优于WAE,且收敛时间短于WAE;而SOAECN 在AECN 基础上改进了网络损失函数,加入了自组织策略,改进的损失函数提升了网络的工况识别率,但自组织策略一定程度增加了网络的训练时间。

表2 不同方法的识别结果Tab.2 Identification results of different methods
其次验证ESGMD 的效果,采用不同的信号分解方法进行对比分析。方法1:ESGMD⁃SOAECN;方法 2 :CEEWD⁃SOAECN ;方法 3 :SGMD⁃SOAECN;方法4:VMD⁃SOAECN;方法5:Raw⁃SOAECN(原始信号直接输入SOAECN);方法6:FFT⁃SOAECN(频谱输入SOAECN);方法7:En⁃velope⁃SOAECN(包络谱输入SOAECN)。各信号分解方法选择Q值最大的前4 个分量进行重构,表3列出了不同方法10 次实验的工况识别率。

表3 不同信号输入方法的工况识别结果Tab.3 Working conditions identification results of differ‑ent signal input methods
由表3可知,CEEMD 由于模态混叠严重导致工况识别率较低;VMD 改进了CEEMD 模态混叠的缺陷,识别效果略优于CEEMD;SGMD 能有效保持时间序列的本质特征,模态混叠现象进一步降低,效果优于VMD;而ESGMD 采用改进凝聚聚类算法对ISGMCs 进行自适应重组,进一步增强了信号的特征表达,效果优于SGMD;若直接将原始信号输入SOAECN,噪声的存在使得网络的工况识别率仅93.19%,验证了信号降噪前处理的必要性;若直接将频谱或包络谱信号输入SOAECN,识别效果低于ESGMD 方法。
3.4 不平衡数据集下工况识别率
实际工程中正常工况样本所占比例通常较高,因此本文设计4 种数据集,比较不同方法的工况识别性能。设置正常工况与故障工况的样本比例分别为8000:8000,8000:6400,8000:4800 和8000:4000,实验共进行10 次,本文定量计算3 种方法基于不平衡数据集的精确率F1值,如下式所示:

式中P为精确率;R为召回率。F1值在[0,1]之间,0 代表最差,1 代表最好。以组3 为例,表4列出了相应的F1值。

表4 组3 中不同方法的F1值Tab.4 F1 of different methods in group 3
由表4可知,组3 中ESGMD⁃SOAECN 的F1指标值较高,进一步验证了ESGMD⁃SOAECN 在面对不平衡数据集的优势。
3.5 不同激活函数对工况识别率的影响
本节讨论几种不同激活函数对SOAECN 识别准确率的影响,结果如表5所示。由表5可知,Gaussian 小波、Morlet 小波和Mexican hat 小波的工况识别效果优于其他激活函数,Gaussian 小波在时域、频域均有良好的分辨率,取得了更好的识别结果。

表5 不同激活函数对SOAECN 识别准确率的影响Tab.5 Influence of different activation functions on SOAECN identification accuracy
3.6 跨工况识别研究
实际工程中电机通常在变工况下运行,本节验证了提出方法在跨工况下的泛化能力,使用带标签的源域信号样本对无标签的目标域信号样本进行识别,带标签样本仅作源域数据使用,以工况b~k 为例,结果如表6所示。 由表6可知,ESGMD⁃SOAECN 的跨工况识别结果的平均识别准确率在92%以上,这表明所提方法有一定的跨工况识别能力,后续将进行进一步研究,提升模型的跨工况识别准确率。

表6 跨工况识别结果Tab.6 Identification results of across the working condition
4 结 论
本文提出一种ESGMD⁃SOAECN 的电机轴承工况识别方法,主要结论如下:
(1)ESGMD 信号分解方法采用改进凝聚聚类算法缓解了SGMD 的模态混叠现象;提出一种综合评价指标能较好地筛选出较能反映电机轴承振动信号特征的聚类辛几何模态分量并重构,为后续SOAECN 自动工况识别提供优秀的训练样本。
(2)SOAECN 引入自组织策略,在训练过程中自适应动态变化,更适用于非线性和非平稳性电机轴承振动信号;在均方损失函数的基础上加入一阶收缩惩罚项、二阶收缩惩罚项和可分辨惩罚项,提升了网络对输入信号微小变化的鲁棒性和信号结构变化的可分辨性。
(3)引入的自组织策略耗时多,部署到工业环境中实时性不够,这也是今后需要改进的方面。
