基于UWB TOF测距的矿井精确定位方法研究
2022-09-01王飞
王 飞
(1.中煤科工集团重庆研究院有限公司,重庆 400039;2.瓦斯灾害监控与应急技术国家重点实验室,重庆 400037)
0 引言
随着智能矿山建设的推进,矿井精确定位系统在煤矿井下得到推广应用[1]。山东煤矿安全监察局发布的《山东煤矿人员精确定位系统技术要求(试行)》明确规定:系统在理想状态的静态定位误差小于0.3 m,采煤工作面、掘进工作面及运输巷道的静态定位误差小于1.0 m[2]。因此,研究矿井精确定位方法、实现对井下人员的精确定位,有利于提高矿井安全生产管理水平。一旦发生矿井灾害事故,救援队伍可以准确、快速地到达灾难现场实施救援工作[3]。
目前,超宽带(ultra wide band,UWB)定位技术具有定位精度高、并发容量大、通信速率快和抗干扰能力强等特点[4-5],定位精度可达30 cm,得到了越来越多科研机构和研究单位的重视。针对UWB定位技术,主要有3种定位方法[6]:到达时间(time of arrival,TOA)、到达时间差(time difference of arrival, TDOA)和飞行时间(time of flight,TOF)。TOA需要定位卡与定位基站、定位基站与定位基站之间严格时钟同步,所以系统时钟同步困难、晶振稳定性要求高、系统复杂、成本高[7]。TDOA不需定位卡与定位基站时钟同步,但需定位基站与定位基站之间严格时钟同步,所以系统时钟同步困难、晶振稳定性要求高、成本较高[8]。TOF不需要定位卡与定位基站、定位基站与定位基站之间严格时钟同步,所以系统简单、成本低[9]。
针对矿井线型巷道和交叉路口,本文提出一种基于UWB TOF测距的矿井精确定位系统。该系统定位基站之间、定位基站与定位卡之间均无需时钟同步,大大降低了定位基站和定位卡的复杂度和成本,实现了矿井巷道高精度精确定位。该系统具有设备安装便捷、组网灵活、扩展性强、适用性广的优点,能够满足矿井巷道的精确定位需求。
1 总体设计
1.1 系统架构
矿井精确定位系统主要包括服务器、工业以太环网、定位基站和定位卡这4个部分。UWB精确定位系统网络拓扑如图1所示。
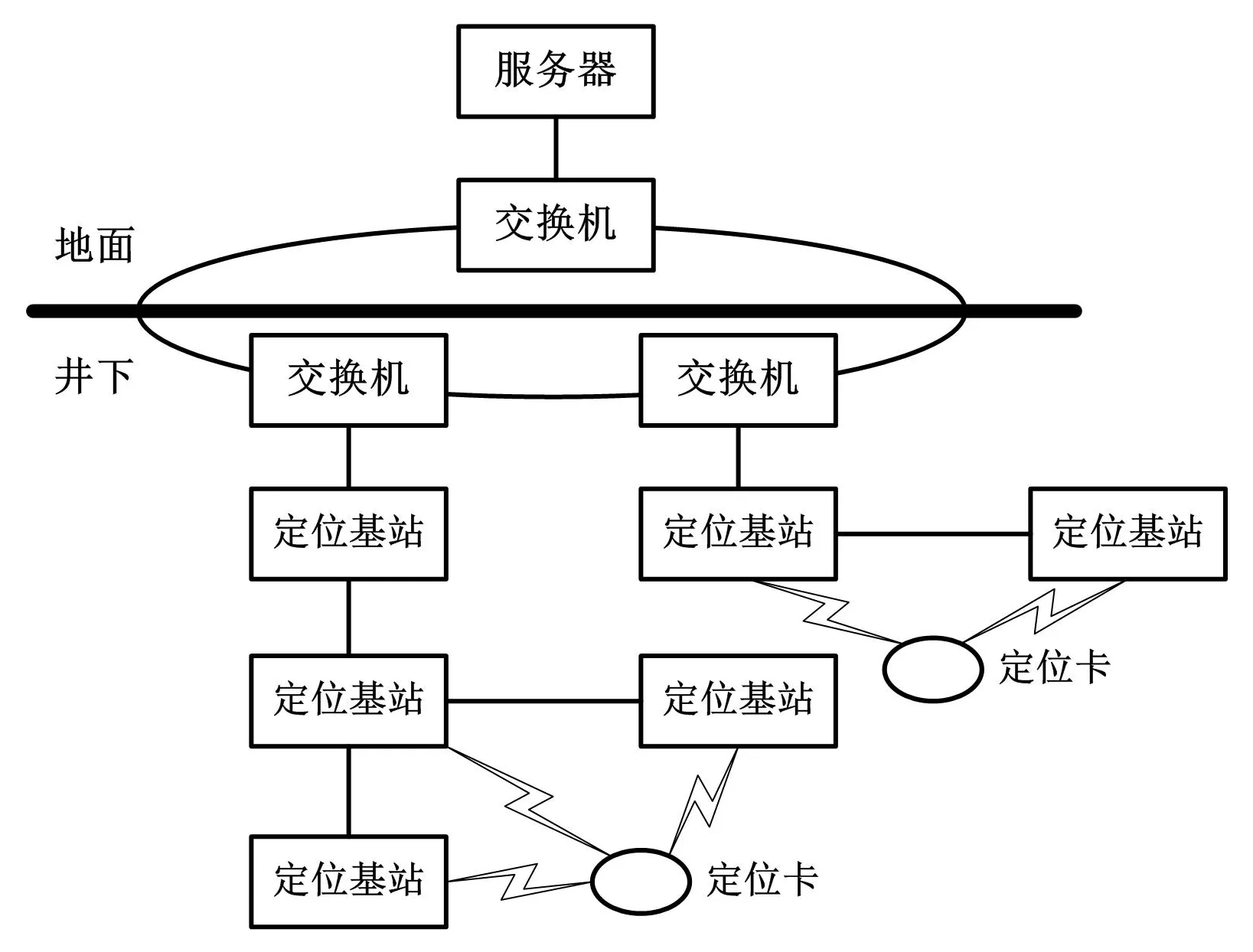
图1 UWB精确定位系统网络拓扑图
服务器根据TOF测距值计算出定位卡的具体位置。工业以太环网由交换机组成,建立高速数据传输通道。定位基站具有3路光纤接口和1路UWB通道。定位卡具有1路UWB通道。定位基站通过光纤接口建立1个树型以太网,用于高速、可靠和实时地传输精确定位数据。定位基站采用UWB通道与定位卡进行TOF测距,测得定位基站与定位卡之间的距离值。定位基站通过树型以太网、工业以太环网将TOF测距值传输至服务器。服务器采用线型巷道定位算法或交叉路口算法得出定位卡的具体位置,从而实现矿井巷道的精确定位。
1.2 基站组网
在矿井巷道中,定位基站主要有2种组网模式,分别为线型巷道组网和交叉路口组网。定位基站组网模式如图2所示。

图2 定位基站组网模式
在线型巷道,每隔一段距离布置1台定位基站。在交叉路口,每个路口处布置1台定位基站。定位基站之间无需时钟同步,相邻基站之间需要完全重叠覆盖,从而保证定位卡能与多个定位基站同时进行TOF测距。
定位基站组网流程如图3所示。

图3 定位基站组网流程图
2 精确定位技术
2.1 改进型TOF测距技术
TOF测距原理如图4所示。一般TOF测距需要3次通信[10]。
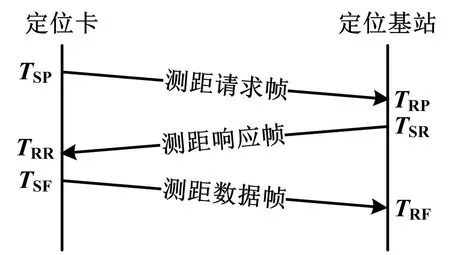
图4 TOF测距原理图
(1)
式中:TSP为测距请求帧的发送时间戳;TRP为测距请求帧的接收时间戳;TSR为测距响应帧的发送时间戳;TRR为测距响应帧的接收时间戳;TSF为测距数据帧的发送时间戳;TRF为测距数据帧的接收时间戳;TF为UWB无线信号在定位卡与定位基站之间的飞行时间。
使用式(1)计算得出UWB信号在定位基站与定位卡之间的空中飞行时间TF,具有更高的测距精度,可大幅降低晶振漂移造成的定位误差[11]。
因此,定位卡与定位基站之间的距离计算公式为:
D=TF×C
(2)
式中:D为定位卡与定位基站之间的TOF测距值;C为光速,3.0×108m/s。
在线型巷道处,定位卡要与2个定位基站进行TOF测距。在交叉路口处,定位卡要与3个定位基站进行TOF测距。因此,定位卡分别需要进行6次或9次UWB通信。为了减少测距时间、提高测距效率,对TOF点对多点测距流程进行了优化,提出改进型TOF点对多点测距方法。改进型TOF点对多点测距原理如图5所示。
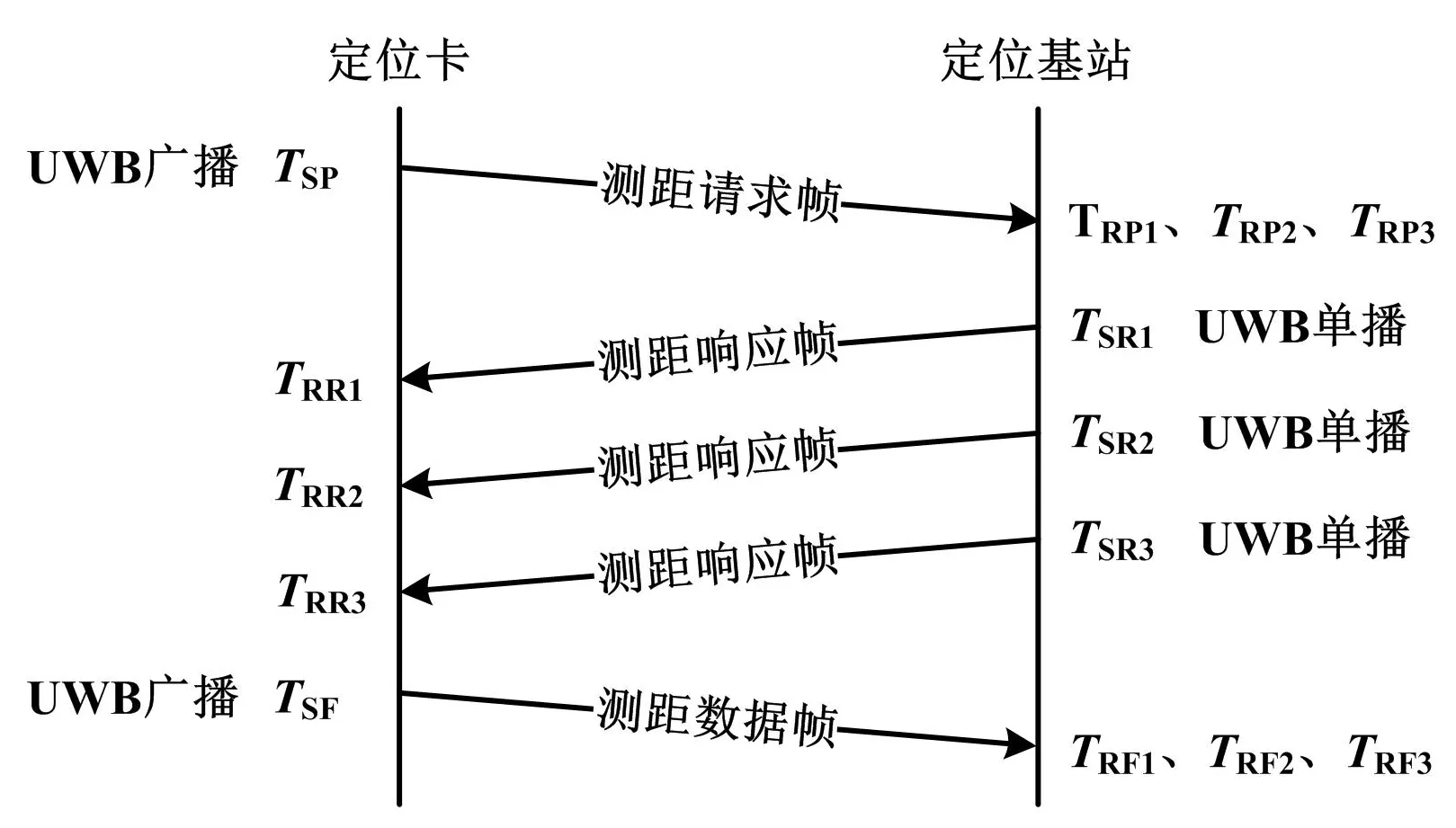
图5 改进型TOF点对多点测距原理图
定位卡广播发送测距请求帧。周围的定位基站接收后依次回复测距响应帧。定位卡广播发送测距数据帧。因此,采用改进型TOF点对多点测距方法时,定位卡在线型巷道、交叉路口处仅需4次或5次UWB通信。
参照式(1)、式(2),可以计算得出定位卡与多个定位基站之间的距离。
2.2 线型巷道定位算法
针对线型巷道,定位基站M与定位基站N之间的距离为DMN。线型巷道位置分布如图6所示。

图6 线型巷道位置分布
线型巷道定位算法流程如图7所示。
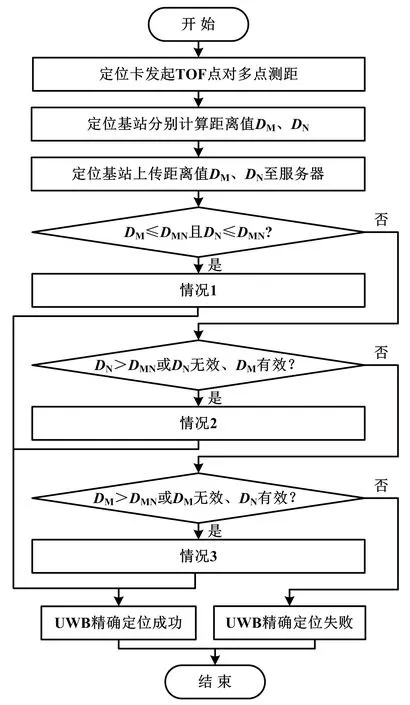
图7 线型巷道定位算法流程图
图7中,定位卡具体位置存在以下3种情况。
①情况1:定位卡在定位基站M与定位基站N覆盖区域的中间。
②情况2:定位卡在定位基站M与定位基站N覆盖区域的左侧。
③情况3:定位卡在定位基站M与定位基站N覆盖区域的右侧。
采用改进型TOF点对多点测距方法,计算出定位卡与定位基站M、定位基站N的距离值为DM、DN。服务器根据DM、DN和DMN,确定定位卡的具体位置,从而实现线型巷道精确定位。
2.3 交叉路口定位算法
针对交叉路口(如三岔路口等),定位基站A、定位基站B和定位基站C相互之间的距离为DAB、DBC、DAC。交叉路口位置分布如图8所示。
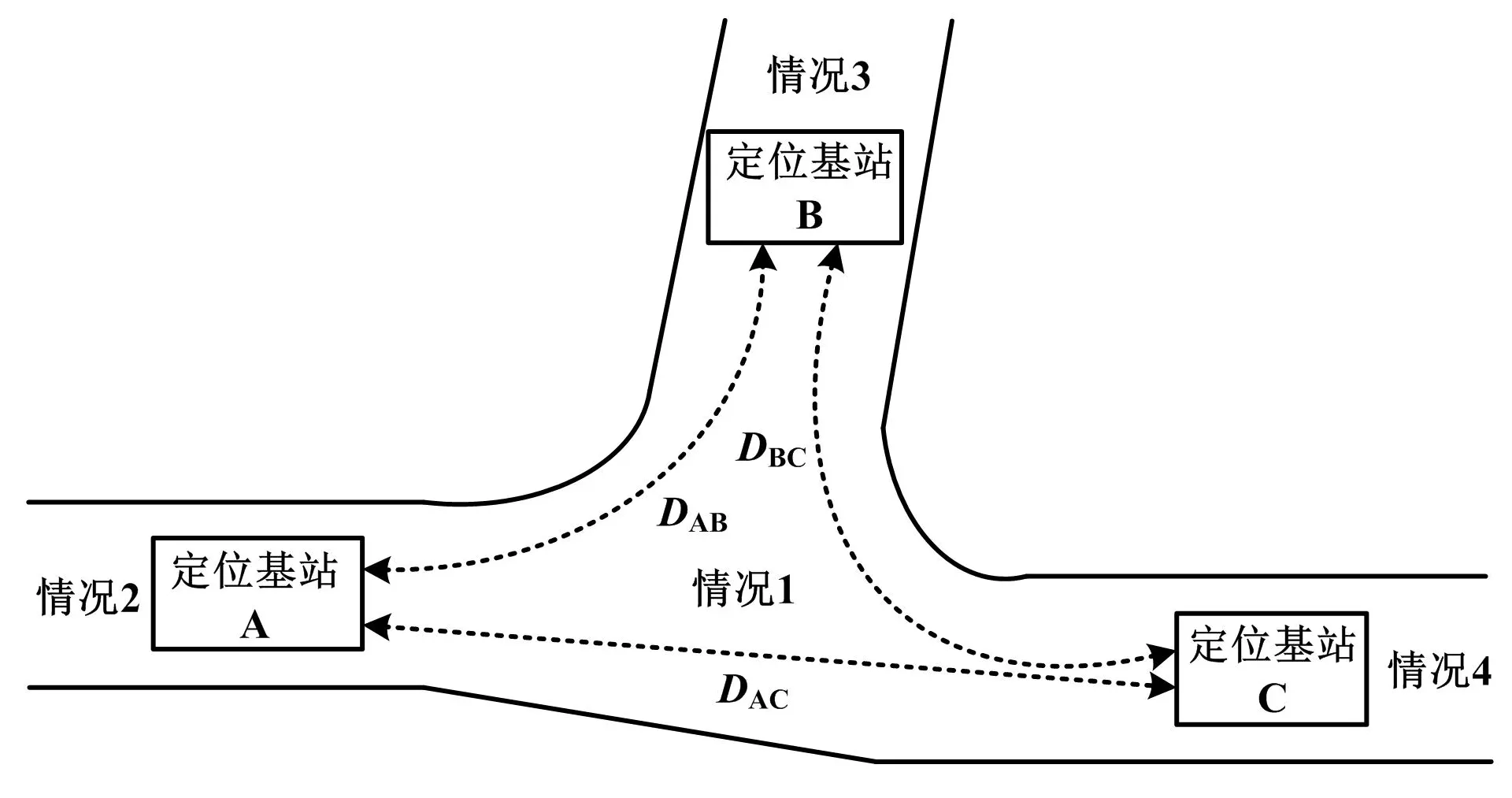
图8 交叉路口位置分布
采用改进型TOF点对多点测距方法,计算出DA、DB、DC。服务器根据DA、DB、DC和DAB、DBC、DAC,确定定位卡的具体位置,从而实现交叉路口精确定位。
交叉路口定位算法流程如图9所示。

图9 交叉路口定位算法流程图
图9中,定位卡具体位置存在以下4种情况。
①情况1:定位卡在定位基站A、定位基站B和定位基站C的共同覆盖区域。
②情况2:定位卡在靠近定位基站A方向的覆盖区域。
③情况3:定位卡在靠近定位基站B方向的覆盖区域。
④情况4:定位卡在靠近定位基站C方向的覆盖区域。
3 试验测试与结果分析
为验证线型巷道定位算法和交叉路口定位算法的实际效果,在瓦斯灾害应急信息技术国家重点实验室清水溪实验巷道内搭建测试平台。测试平台如图10所示。该平台布置4台定位基站、30张定位卡;定位基站之间采用光纤连接,采用增益为12 dB的全向天线;天线安置高度约为2 m、距巷道壁约为0.8 m;定位卡均匀地放置在6个测试点,离地面约为1.2 m。

图10 测试平台
精确定位测试数据如表1所示。

表1 精确定位测试数据
定位基站1~定位基站4之间的距离如下:D12为82.4 m、D13为102.5 m、D23为84.6 m、D34为408.2 m。测试点a与定位基站1之间的距离Da1为31.8 m。测试点b与定位基站1、定位基站2、定位基站3之间的距离Db1为52.2 m、Db2为31.8 m、Db3为50.0 m。测试点c与定位基站2之间的距离DC2为43.5 m。测试点d与定位基站3、定位基站4之间的距离Dd3为48.7 m、Dd4为370.5 m。测试点e与定位基站3、定位基站4之间的距离De3为405.1 m、De4为14.1 m。测试点f与定位基站4之间的距离Df4为273.4 m。在测点a~测点f处分别放置5张定位卡,测试10 min,随机选取其中6张定位卡的任意定位数据进行分析。
根据表1测试数据结果分析,精确定位误差小于0.3 m,最大定位距离大于400 m,位置判断正确。
4 结论
针对矿井现场应用需求,本文提出了一种基于UWB TOF测距的精确定位方法。该方法通过设计系统网络架构、研究定位基站组网机制,使定位基站之间、定位基站与定位卡之间均无需时钟同步,大大降低了定位基站和定位卡的复杂度和成本。同时,本文提出一种改进型TOF点对多点测距方法,减少了UWB通信次数,提高了TOF测距效率。根据矿井巷道空间特点,研究巷道线型定位算法和交叉路口定位算法,定位卡与相邻多个定位基站同时测距,实现矿井巷道精确定位。测试结果表明,UWB精确定位误差小于0.3 m,最大定位距离大于400 m,位置判断机制可靠、正确。因此,该系统能够提供一种安装便捷、组网灵活和成本较低的精确定位方法,为各种移动目标提供精准定位和位置信息服务,从而满足智能矿山建设需求。
