可逆式水轮发电机组镜板形貌视觉测量方法研究
2022-09-01张衡李江涛卢宝江
张衡, 李江涛, 卢宝江
(国网新源控股有限公司北京十三陵蓄能电厂,北京 102200)
0 引言
可逆式水轮发电机是水力发电系统中重要的动力来源,镜板是发电机组中关键零部件之一,准确地测量镜板平面度和闭合差等指标非常重要[1]。目前的技术由于采样布点方式不同、测量仪器的精度和数据处理方式不同,造成对于可逆式发电机镜板环形平面度测量精度不高,影响了发电机组的性能,从而影响了整个水力发电系统的工作效率[2]。
针对上述存在的问题,文献[3]提出了液面测量法,通过测量液体的平面变化、各点的相对偏移量,得出平面度误差。由于液体具有一定的黏性,在测量过程中需要将两侧液体稳定,测量时间较长,同时温度变化对测量结果有很大影响,造成检测精度不高。文献[4]研究应用激光准直扫描法,通过光电接收系统测得激光基准平面上各点的位移变化,计算得到平面度误差。激光在空气中传播受到其他因素的影响,使折射率不均匀,造成了测量不稳定的问题。
针对上述研究存在的不足,本文应用镜板视觉采样测量系统,通过激光位移传感器、键相传感器、定位传感器和光纤传感器来感应镜板位移的变换,进行周期性采样,经过齐次矩阵变换计算出发电机组镜板的平面度和闭合差。测量系统对测量环境的温度和湿度的要求不高,机械振动对测量精度的影响较小。
1 镜板形貌视觉测量方法
本文的创新点:在测量系统中加入放大电路,对输入信号进行放大,共模抑制比较高,对测量过程中发电机组产生的噪声起到了衰减作用,降低电磁干扰的影响,提高测量系统的测量精度。
1.1 镜板视觉采样测量系统
可逆式水电发电机组的镜板尺寸大、对测量的精度要求高,给机械加工制造和水平度的测量带来很大困难[5]。镜板造价成本较高、加工时间长且零部件具有不可替代性、机械结构特殊对平面度测量系统提出了更高的要求[6]。表1所示为对测量系统的要求。

表1 发电机组镜板对测量系统的要求
测量环境在加工车间中环境质量不佳,且空气的温度和湿度不恒定,存在各种因素的影响造成空气扰动,所以要求测量系统的有效测量范围大,且测量精度高、测量速度快[7]。严格的测量要求使很多测量方式无法适用,机械基准测量法使用高精度机械轨道和回转系统,只能分离系统误差,对镜板平面度测量产生的随机误差无法消除[8]。
根据对可逆式水电发动机组镜板平面度测量的特殊要求,本文应用一种镜板视觉采样测量系统,系统结构如图1所示。

图1 镜板视觉采样测量系统结构图
镜板视觉采样测量系统总体由传感器、数据采集系统、显示模块等部件组成[9],具体有激光位移传感器、键相传感器、定位传感器和光纤传感器,用来感应发电机组镜板每次运动的位置变换,记录部件的摆动数据和机组转动的角度[10]。数据采集系统接收各种传感器传输来的数据,在电路中实现数字信号和模拟信号之间的转换,在系统中储存传感器传来的数据,进行整理、计算和分析[11]。表2所示为镜板视觉采样测量系统的采样指标。

表2 数据采样指标
系统在硬件设备上集成实现其具体功能,根据发电机组镜板对测量系统的要求,装置的体积不能过大,采用标准4U高度,便携式结构方便安装和测量[12]。传统的测量系统,由于测量环境空气中的杂质和发电机组造成的振动,使测量仪器连接器故障和线路损坏,导致测量出现失误。本系统的采样设备使用单板系统结构设计,减少了因测量环境问题造成的故障,高集成度的芯片处理和传输速度更快[13]。系统采样以多路通道设置采样模式,单个传感器可实现多路多功能采样通道,最高频率可达到100 kHz。多个传感器同时工作,协同测量,并且系统中设置有抗电磁干扰的功能,使传感器在发电机组镜板平面度的测量过程中能够正常工作[14]。各个传感器之间互相连接,且各采样通道互相分离,一个传感器通道受损,其他传感器仍然能够正常使用。
1.2 测量系统中的信号调理电路
信号调理电路是对测量系统中信号的放大和滤波。由于传感器在对发电机组镜板的平面度测量中,发电机经常会产生噪声,对信号的传导产生干扰,造成系统误差,使测量精度下降[15]。因此,在电路中加入滤波器,对噪声信号进行处理,在一定程度上使信号衰减,从而提高信噪比,减小了测量误差,提高了测量系统的精度[16]。如图2所示为分压电路。

图2 分压电路
镜板视觉采样测量系统输出电压信号,电压范围是-2~-18 V。需要对输出进行处理以满足输入电压的有效值,有效范围是-3~+3 V。所以采用分压电路对传感器的输出信号进行处理。分压电路中配置参数如表3所示。

表3 分压电路配置参数
经过以上分压电路处理后的输入信号进入放大电路,降低信号中的噪声。放大电路的核心是运放,能够放大频带带宽,受信号中噪声影响较小,共模抑制比高且温度稳定。放大电路如图3所示。
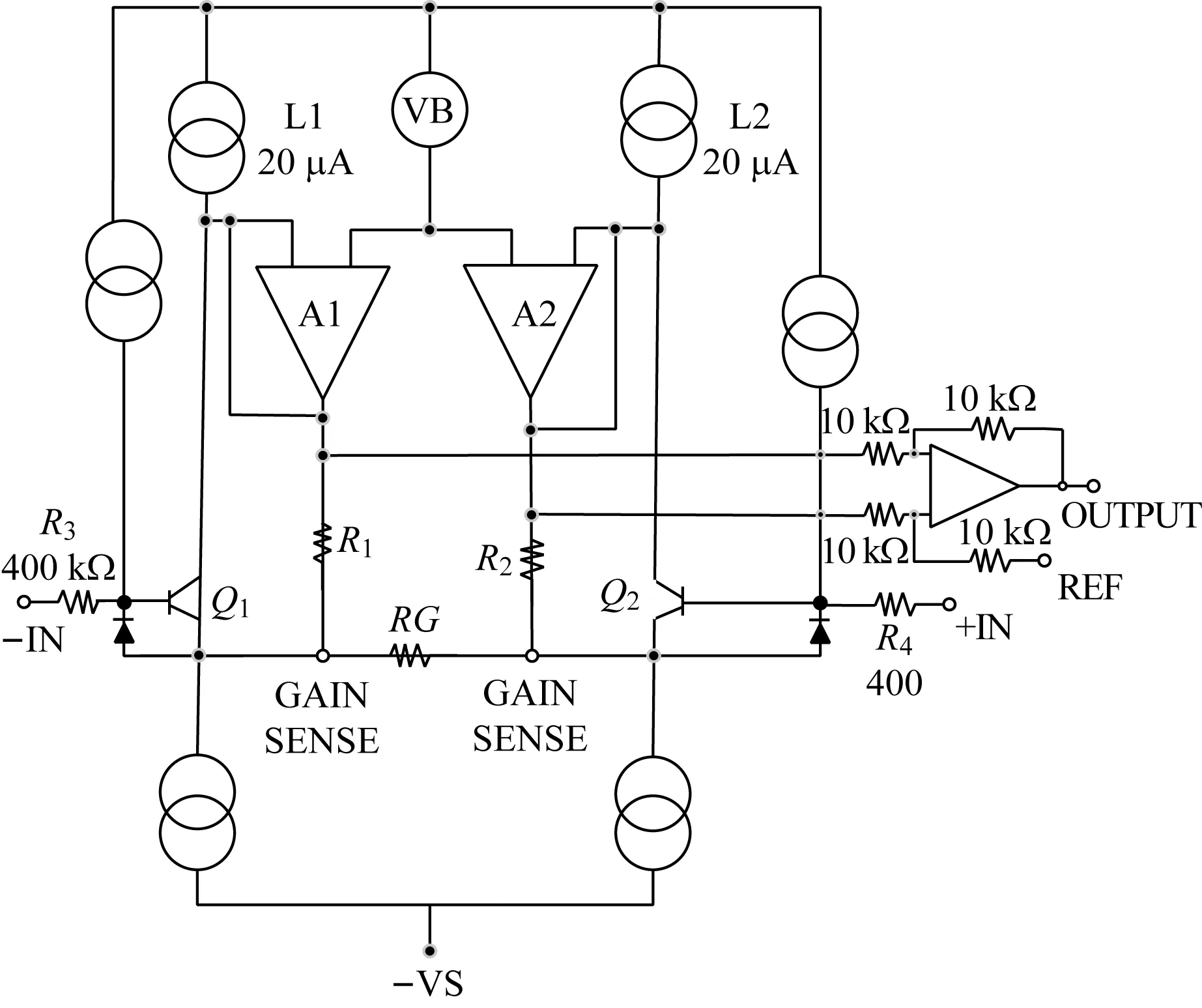
图3 放大电路
放大电路由电容、电阻和放大器通过串联和并联的方式组成。输入端晶体管Q1、Q2输入特性为差分双极性,且精度较高,还应用了SuperBeta进行处理,降低了输入端的偏执电流。电阻R限制了输出电压的幅值,使输出电压不会过大也不会过小。放大电路中Q1/A1/R1和Q2/A2/R2组成了反馈环路,不受其他因素的影响,集成电流保持一定。因此产生了从输入至A1/A2的差分增益,表达式为
G=(R1+R2)/RG+1
(1)
其中,G表示差分增益,R表示各电阻的阻值。RG确定了前级功放,RG越小放大倍数就越大,增益可表示为
(2)
分压和放大电路的作用是将输入信号进行处理,模拟信号转换为数字信号,输出信号的电压保持在-5~+5 V范围内。
在番茄无公害栽培期间,如果是选择单干整枝方式,应该保留番茄主干,单株结实达到5-7穗果时,顶部果穗留两片叶摘心,将其中的枯枝和叶子全部摘除,避免滋生病虫害影响番茄植株正常生长。
1.3 测量点位置的计算与变换
实现对可逆式水轮发电机组镜板平面度的测量的关键是对测量点位置的计算与变换。本文对测量系统进行位置运动学分析,利用齐次矩阵变换原理得到测量系统的数学模型。齐次矩阵坐标变换如图4所示。

图4 齐次矩阵坐标变换


(3)
由图3可知:
(4)
式(3)和式(4)结合可得:

(5)

式(5)可以表示成矩阵形式:
(6)
(7)
绕Y轴转动可表示为
(8)
绕Z轴转动可表示为
(9)
原始坐标系经过移动后可表示为
(10)
由于测量系统是在三维空间中测量镜板运动的系统,要想测量准确就要先了解运动的几何关系,对位置运动学进行研究,根据位移变量求位置。即绕Y轴转动和Z轴转动,综合这两种运动变换,可得到正向变换齐次矩阵:

(11)
在测量实验的实际情况下,由于镜板在不同位置绕Y轴的转动量远远小于镜板绕Z轴转动的变量,因此在坐标转换时可不考虑绕Y轴转动对测量的影响,对每一次转位只考虑绕Z轴的转动,可以简化为运动只在XY平面内旋转,是测量计算过程简化,对测量镜板平面度连续走位进行分析时也可以进行简化。经过简化后的坐标齐次矩阵为
(12)
通过分析镜板不同位置的测量变换数据,可以测算出镜板平面度的大小。根据各种传感器回传的数据,完成对发电机组镜板的测量。
2 应用测试
为验证所研究智镜板视觉采样测量系统的性能,在测量过程中随机选取5个测量点并记录测量点的位置,如表4所示。对发电机组镜板分别使用3种测量方式进行测量,对比测量数据上的误差,分析测量系统的精度。
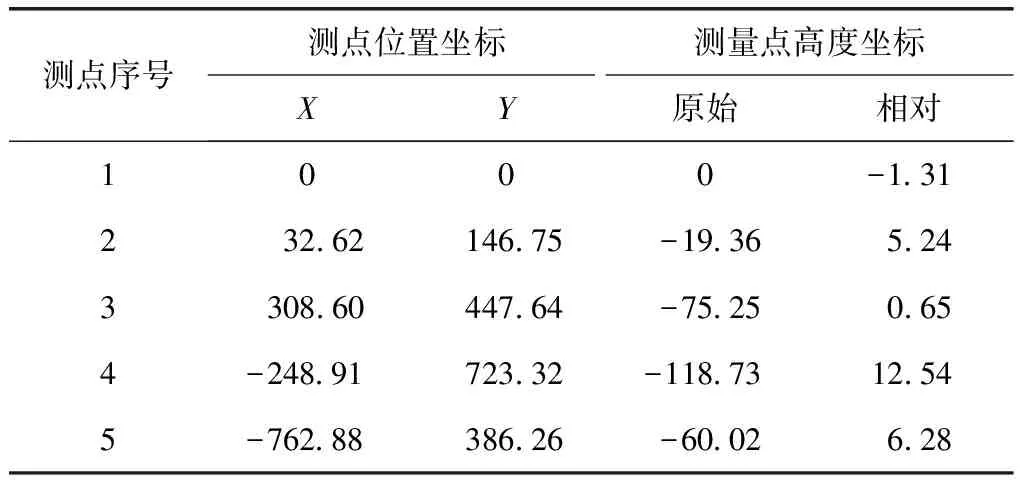
表4 测量点位置 单位:mm
在温度、湿度一致的测量环境下进行试验,测量时采用封闭网格形式布线,随时得到测量点的位置信息,对表4测量点进行测量。表5所示为本文系统对测量点的测量结果和数据误差,表6所示为文献[3]的测量结果,表7所示为文献[4]的测量结果。

表5 本文系统的测量结果 单位:mm
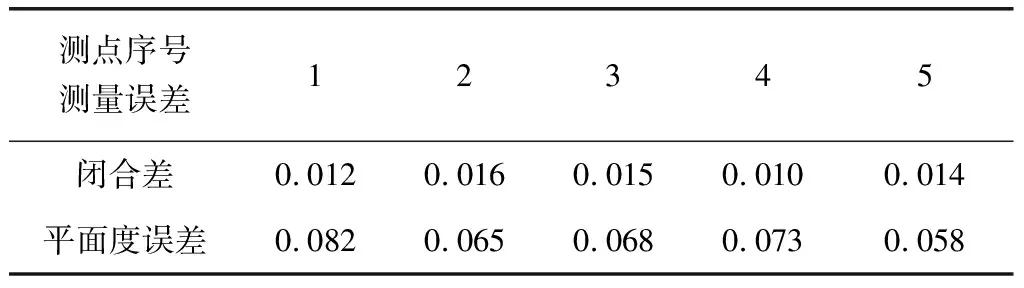
表6 文献[3]的测量结果 单位:mm
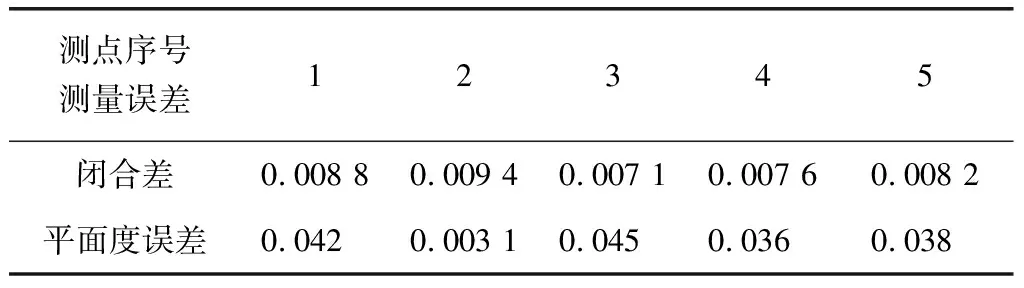
表7 文献[4]的测量结果 单位:mm
通过观察对比测量结果可知,本研究测量系统对发电机组镜板的测量精度更高,测量误差更小。经计算可得,本研究测量系统对镜板测量的平均闭合差误差为5.6 μm,平均平面度误差为23.6 μm。文献[3]测量系统的平均闭合差误差为13.4 μm,平均平面度误差为85.6 μm。文献[4]测量系统的平均闭合差误差为8.22 μm,平均平面度误差为38.4 μm。通过对比数据,本文测量系统的闭合差误差和平面度误差最小,因为本文测量系统不受温度变化的影响,测量过程中机械的振动对测量结果的影响不大,传感器具有抗电磁干扰的能力。对第5个测量点测量时,本系统闭合差误差最高为6.8 μm,而文献[3]的闭合差误差高达14 μm,文献[4]的闭合差误差达到了8.2 μm。测量过程中环境温度变化较大,产生的机械振动对文献[3]测量方法的影响最大。本文测量方法抗干扰能力最强,多个传感器同时作用,测量误差最小,完全满足可逆式水轮发电机组镜板测量规范要求。
3 总结
本文应用镜板采样视觉测量系统,通过传感器、数据采集系统和显示模块协同作用,完成了对可逆式水轮发电机组镜板的测量工作,在测量系统中应用了信号调理电路,完成了传感器数据传输中数字信号与模拟信号的转换,对测量系统中信号起到放大和滤波功能,减少了信号中噪声对测量数据的影响,提高了测量系统的精度,减少了系统误差。本文研究也存在一定的局限性,测量系统仅对可逆式水轮发电机组的镜板进行测量,根据镜板特征设计的测量系统,而对于卧式水轮发电机组、多段式的水轮发电机组的镜板测量没有涉及,可能无法适用,对测量系统还需改进。
