钻井平台装船关键点拖缆张力极限值算法研究
——基于实践经验和拖缆张力计算模型的交互实践
2022-09-01王国亮
王国亮
(烟台港引航站,山东 烟台 264000)
目前,钻井平台装船作业的研究,主要停留在引航员及装船总指挥的经验归纳中,少有量化的总结,缺乏普遍的指导意义。在上述作业中,钻井平台首尾线与半潜船甲板支撑底座中心线重合后,由拖轮调整钻井平台船位,靠半潜船缆绳将钻井平台绞入半潜船固定平台的位置,这一过程是钻井平台装船作业的关键节点。该节点须建立于误差最小,稳定性最高的平台位移操纵的基础上。因此,该节点的作业,需要各方面极其精确的量化掌控。本文仅从该节点下,引航员操控拖轮调整钻井平台位移过程中,引航员要求拖轮拖缆张力极限区间的方面进行研究。即:引航员要求拖轮拖缆张力的可控区间计算。这一张力量化区间与引航员经验交互,得出一套可实践的操控方法。
1 研究现状
钻井平台装船作业的研究,主要集中在水域环境限制要求,安全作业方案及技术协调方面。以引航员及装船总指挥的经验为主要研究对象,缺乏对关键节点的量化总结。研究方向主要为以下三个方面:
(1)对成功案例的技术因素、环境因素、管理因素的归纳。如李晗、章文俊等对大连双钻井平台装船作业的过程归纳。
(2)结合成功经验,对作业过程中的要素分析。如张锡海、龙启汛对此种作业中环境要素、稳性要素的分析。从而系统性地从多维角度阐述了平台装船作业的流程总结及要素分析。
(3)以技术协调为主要研究对象的经验分享。如宋炳贵对此种作业中拖轮使用经验的分享。
(4)仿真模拟方面的研究。国内对钻井平台装船仿真模拟方面的研究目前处于起步阶段,并没有大规模全方位的指导意义。仅仅停留在平台六自由度操纵模拟、拖轮顶推拖带仿真模拟方面。如张玉喜对于钻井平台拖带运动的模拟仿真研究。对于装船作业的关键节点,即平台距半潜船装载距离50 厘米以内的模拟操纵研究,尚处空白。
综上见表1,钻井平台装船作业的研究,目前集中在泛论阶段。对于平台装船的关键节点的平台位移操纵,多为经验总结,缺乏量化管理。

表1 钻井平台装船研究现状表
2 关键节点概述
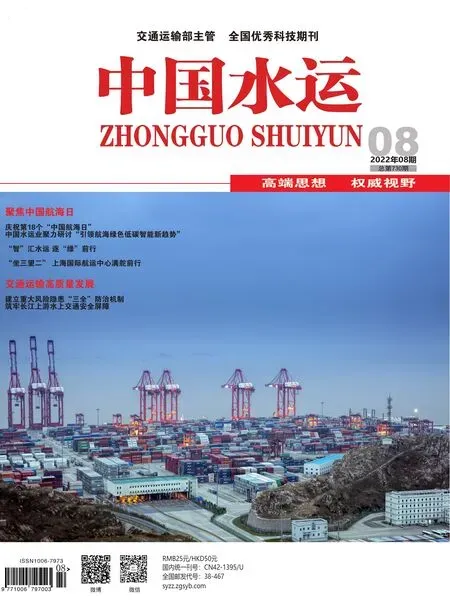
钻井平台首位线与半潜船甲板支撑底座中心线重合后,利用半潜船的缆绳将钻井平台绞至平台安装位置的过程,特别是平台距半潜船甲板固定平台位置50 厘米内的平台位移操纵,是钻井平台装船作业的关键节点。如图1
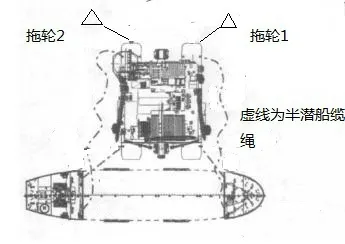
图1 钻井平台装船作业的关键节点
其关键要素在于以下两点:
2.1 拖轮对钻井平台的位移控制
通常,当钻井平台在半潜船处带妥缆绳后,仅在平台离船侧(距半潜船较远侧,下同)带有两艘拖轮,通过拖轮的顶推拖拉对平台位置移动进行微调。(见图1拖轮)其作用在于,当半潜船缆绳绞入平台速度过快,拖轮拖拉平台,起到降速的作用;其难点在于,拖轮拖拉过度,平台会停止进入半潜船的匀速运动,转而变成远离平台的加速运动。在这一加速运动中,很可能产生因两艘拖轮拖拉力臂不一致而导致的偏转运动。这一运动在空间受限的半潜船内极易产生碰撞危险。
2.2 半潜船缆绳对平台的拉力作用
半潜船缆绳对平台的拉力作用,是平台进入半潜船的主要作用力。作业过程的关键点在于,微速、匀速地拉动平台进入半潜船固定平台位置。确保平台首位线始终垂直于半潜船首尾线,确保平台首位线始终重合与半潜船甲板支撑底座中心线,其误差应小于15 厘米。
3 关键节点处的拖轮拖缆拉力极限区间值求取及其应用
如前述:钻井平台装船作业的关键节点处,拖轮对平台的拖拉作用,可以有效防止半潜船缆绳拉动平台产生加速运动,造成平台碰撞半潜船的事故。拖轮的拖拉作用,是平台能够安全进入预定位置的核心要素。但同时,对拖轮拖拉平台的操纵,目前停留在引航员基于现场情况的经验判断,没有量化数据支撑这一判断,往往造成拖轮拖拉过大而致使平台停止进入半潜船的匀速运动,甚至产生平台远离预定位置的加速运动及不能重合半潜船甲板支撑底座中心线的偏转运动。因此,关键节点处,拖缆张力应控制在一个合适的区间内,为引航员控制拖轮提供数据参考具有重大意义。引航员在实际工作中,对于拖缆张力的把握并不直观,每时每刻查询当时的拖轮张力没有实际意义,因此,应利用拖缆张力与拖轮速度的数学关系,通过拖缆张力求得拖轮速度,将拖轮速度控制在极限值以下的方法,可以帮助引航员直观地控制拖轮拖缆张力。
3.1 通过拖缆张力的极限值求得关键节点处拖轮速度
为保持平台近匀速缓慢进入预定位置,拖缆张力极限值应小于等于半潜船缆绳对平台的拉力直至张力为0。通过拖缆张力极限值同拖轮航速间的数学关系,可以求得式(1):

式中:——拖轮拖缆张力,KN
——半潜船缆绳拉力,KN
其中,可以通过缆绳产品质量证明书上的安全工作符合查到,因此,可以得到的极限值。根据《U.S.NAVY Towing Manual》,可得式(2):

式中:T——拖轮稳态拉力
T——拖轮因偏当运动产生的动态拉力
T——拖轮和被拖船受波浪运动产生的动态拉力
其中:根据张锡海对钻井平台装船环境影响的研究及实践可知,此种作业所需海浪、风力、洋流有严格限制。如表2。

表2 钻井平台装船作业对环境要求表
因此,在此种环境下,拖轮受海浪影响的偏当运动幅度很小,由此产生的T、T可以忽略不计。因此可得式(3):

根据《海上拖船指南》,可得式(4):

式中:R——拖轮总阻力,KN
R——拖缆阻力,KN
T——拖缆张力的垂直分量
其中:因拖轮拖缆为尼龙缆,拖带平台时几乎没有下垂量,因此拖缆张力的垂直分量T忽略不计;根据崔鹤怀关于《基于.NET 的拖航中拖缆张力监测与辅助决策系统的开发》的研究成果,拖缆阻力R经验值为拖轮总阻力R的10%。因此,通过式4 可求导出拖轮总阻力R。
将R代入式(5)。

式中:R——被拖船(钻井平台)的摩擦阻力,KN
R——被拖船(钻井平台)的剩余阻力
R——拖船的摩擦阻力
R——拖船的剩余阻力
其中:拖船的摩擦阻力R、拖船的剩余阻力R可通过查阅拖轮设计资料获取。因此,通过式(5)可得出R+R的和,设该和为W。
将R+R结果W 代入式(6)。



将式(6) 展开,得式(7)。


V——船舶拖航速度,M/s
A——船舶水下湿表面积,m
A——浸水部分的船中横剖面,m

4 关键节点处引航员对上述数学公式的实践验证交互研究及技术协调
4.1 实践验证交互研究
引航员在钻井平台作业前,通过计算求导出拖缆张力极限值时的速度V 后,在关键节点作业时应时刻注意,拖轮速度不能超过极限速度V。如果超过极限速度V,意味着拖轮拉力大于半潜船缆绳拉力,则钻井平台将会有远离半潜船的趋势。因此,船速越高,引航员警觉性应该越强。时刻注意不要让拖轮速度超过极限速度V。见图2
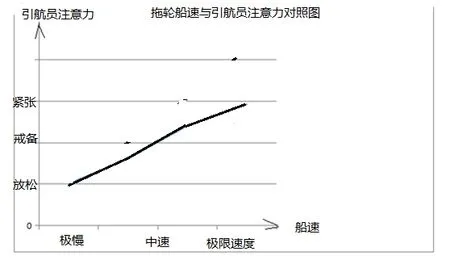
图2
4.2 技术协调
在装船作业的关键处控制拖轮时,引航员及装船总指挥不可教条,拖轮速度V 的求值只能作为关键处拖轮操纵的量化参考。对于现场情况变化所导致的一切不可预测因素,如风力突然增大,风向突然改变,潮汐变化异常等,应及时调整对拖轮速度V 的预期。不可在不考虑环境因素改变的情况下完全依靠量化结果操船。