两栖步枪双弹种通用发射器研究8
2022-08-31李瑞亮李文国牛青林
*韩 铁,李瑞亮,李文国,王 斌,牛青林
(1.中国人民解放军92840 部队,山东,青岛 266405; 2.中北大学机电工程学院,山西,太原 030051)
0 引言
为满足海军陆战队的两栖作战需求,需设计一款能同时射击陆上枪弹和水下特种弹的两栖步枪。我们通过对步枪供弹系统、导气系统和缓冲机构的重新设计,既能满足陆上弹丸和水下特种弹丸两种长度不同弹丸适用性,又能满足不同环境中导气室的气体调节量对自动机后坐所需克服阻力的影响,同时保证缓冲机构在两种环境中复进和闭锁到位。
1 步枪通用结构发射器设计
1.1 通用结构射击器设计要求
作为一种两栖作战双弹种切换的发射器,其区别于传统突击步枪的最重要一点就是能够实现切换弹种射击[1],即将弹匣卡笋与抛壳挺和外壳滑动结合,并实现弹种切换可靠击发并自动完成击发、开锁、后坐、抽壳、抛壳、复进、进弹动作。此外,还要满足射击稳定性和结构简单、可靠性高等要求。
1.2 通用结构发射器设计方案
水下步枪双弹种通用结构发射器以枪管的固定连接件和下机匣作为一切构件运动和固定的基架和基准。枪管通过预留的带孔的连接件进行固定。通过机匣盖、复进簧导杆及复进簧导杆帽的共同配合将机匣牢固固定悬挂于机匣的上方,使枪机可沿机匣上的导轨完成后座和复进的动作。
1.2.1 抛壳挺设计方案
抛壳挺是实现两种不同弹丸切换的关键[2]。通过不同位置插销控制抛壳挺和弹匣轴向前后运动,从而实现水下弹丸和陆上弹丸弹匣的切换和两种弹丸在不同位置的抛壳。轴向可变抛壳挺示意图如图1 所示。枪机后座时,枪机后坐力在抽壳钩带动弹壳向后运动时作用于不同长度的弹丸不同位置抛壳。在安装弹匣时,卡笋是可随着抛壳挺轴向运动的,以适应不同长度的弹匣。
图1 轴向可变抛壳挺示意图Fig.1 The diagram of axial variable shell casting
1.2.2 击发方式设计
由于两栖步枪要在水中工作,因此需要一种简单可靠的击发方式[3],设计了如图2 所示的击发方式。黑色阻铁为击锤所在位置。发射时,浅黑色的扳机连接杆受到向后推力而带着曲杆向后运动。曲杆前端上翘并接触到黑色的阻铁,阻铁受到竖直方向的力以圆孔为轴心顺时针运动,直动式击锤受到阻铁簧的推动向前运动撞击枪机中的击针。
图2 扳机示意图Fig.2 The diagram of trigger
1.2.3 枪机结构设计
枪机是全枪最重要的部件之一,用于在复进簧的作用下闭锁枪膛[4]。为了实现自动射击,以枪机为基准需要利用不同的零件组合工作完成击发、抽抛壳和进弹等动作,同时还要推动枪机在闭锁件闭锁到位。枪机组件包括枪机、复进簧、抽壳钩、击针、枪机框等。
本次设计使用的是口径为5.8 mm的标准陆上枪弹及5.8 mm的标准水下特种弹丸,两种弹丸均已大量装备部队,便于保障。枪机闭锁方式选择回转式闭锁,回转式闭锁方式广泛应用于各类武器上可以保证闭锁可靠性,结构简单便于设计。
因自动方式选择身管短后坐自动方式所以闭锁方式选择机头回转式闭锁方式,根据以下公式计算机头尺寸。
在枪机材料为30CrMnMoTiA 情况下屈服极限1300 N/mm2,平均最大膛压300 MPa,可以计算数值如表1 所示。
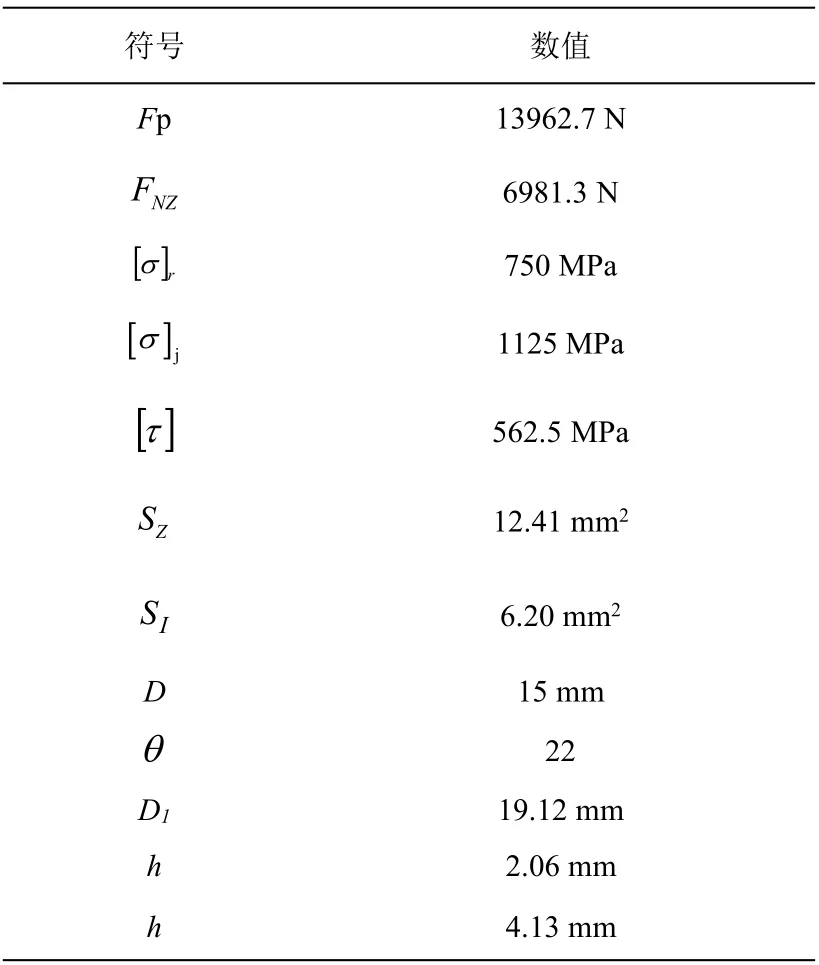
表1 回转枪机参数数值表Table 1 Table of rotary gun parameters
枪机建模示意图如图3 所示。

图3 枪机建模示意图Fig.3 The diagram of rifle bolt modeling
1.3 整体外形设计
两栖步枪采用无托式结构设计,大大减小了整个步枪的长度,适合蛙人特种作战的狭小空间,且弹匣卡榫设计的尺寸较大保证了联接的强度。扳机护圈采用了较大的设计,增加了与扳机的距离以方便特种作战需要,并且能够更好地保护使用者的手和扳机。两栖步枪整枪设计示意图如图4 所示。

图4 整枪设计方案示意图Fig.4 The diagram of whole gun design scheme
2 动力学仿真
利用UG 软件对所设计的结构进行三维建模,之后导入ADAMS 进行运动仿真[5],验证所设计结构能否完成击发、后坐和复进动作及可靠性[6]。由于本次仿真涉及的零件过多,全部导入仿真并一次性完成仿真,难以实现。因此,本次设计的仿真将一个射击循环拆分成击发仿真、枪机后坐仿真、枪机复进仿真三个部分。
2.1 两栖步枪建模
对于该枪来说有两种不同状态的装配图,分别是陆上使用标准的普通弹丸和水中使用的特种水下弹丸。通过改变弹匣卡笋位置,实现不同弹匣子弹的装配[7]。全枪的零件(不包括插销和弹簧)共25 个,通过拉伸分别建模,再完成全枪装配。装配长弹匣的两栖步枪如图5 所示,装配短弹匣的两栖步枪如图6 所示。
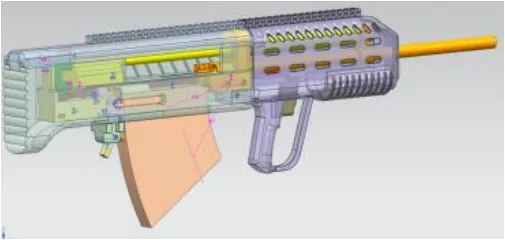
图5 长弹匣全枪装配图Fig.5 The gun assembly drawing of long magazine
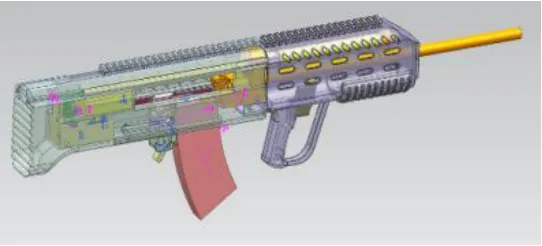
图6 短弹匣全枪装配图Fig.6 The gun assembly drawing of short magazine
2.2 长弹匣动力学仿真
将之前建立的长弹匣两栖步枪模型导入ADAMS 软件中,添加力和约束,设定仿真时间和仿真步长,利用ADAMS 软件结果分析功能,可得出结构中各部件的运动规律[8]。长弹匣枪机复进运动图如图7 所示。
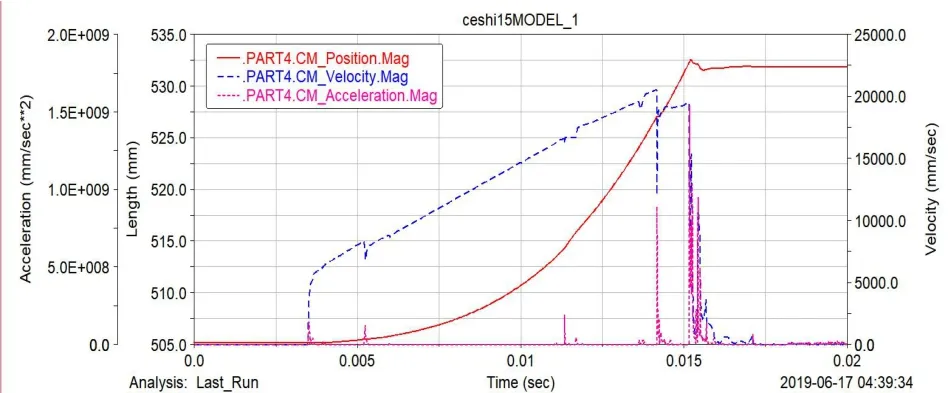
图7 长弹匣枪机复进运动曲线Fig.7 Reprograding motion curve of long magazine rifle bolt
在图7 中,实线曲线为位移-时间曲线,虚线曲线为速度-时间曲线,点线曲线为加速度-时间曲线。
在0-0.0035 s 时间段内,枪机在复进簧的推动下,所受合外力为常量,加速度曲线与t 轴平行且数值很小。在0.005 s 后,枪机与子弹碰撞,推动子弹向前运动,加速度陡增,速度骤降。瞬时子弹与枪机达到同速,枪机加速度再次变为常量,速度均匀增加。在0.011 s 时,子弹进入枪管内壁,枪机运动阻力瞬间增加,运动速度骤减。随着子弹进入弹膛,子弹与枪管轴线夹角变小,枪管对子弹的阻力也变小,枪机运动加速度增大。在0.015 s 左右,子弹近似水平地在枪管中运动,枪机受合外力再次趋于常量,加速度恒定,速度均匀增加。最后子弹弹底缘撞击枪管尾部配合面,枪机在极短的时间内发生激烈碰撞出现抖动,加速度出现急剧变化,其速度在完全闭锁后变为零。
由运动学仿真图可以看出,所设计枪机可以很好完成复进动作并实现闭锁。
长弹匣子弹入膛运动仿真曲线如图8 所示。
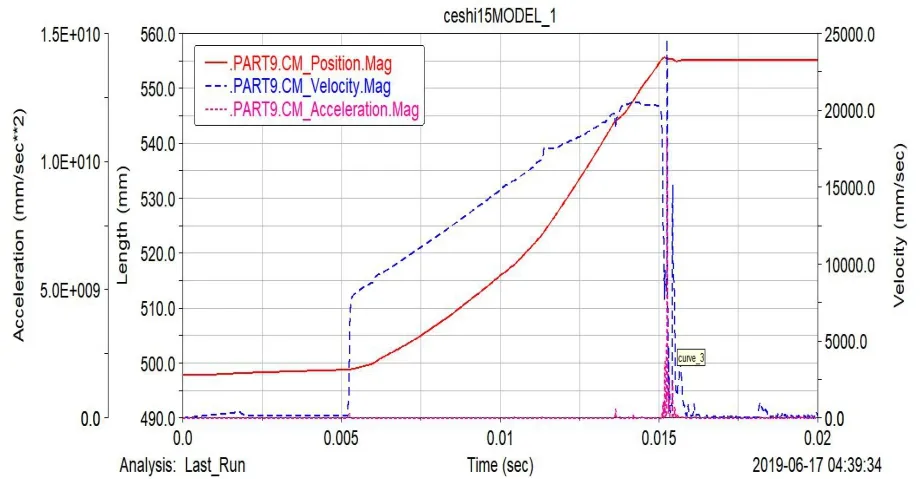
图8 长弹匣子弹入膛运动曲线Fig.8 The projectile movement curve of a long magazine
在0-0.005 s 过程中枪机尚未与子弹发生接触,故速度和加速度均为0。在0.005 s 之后,枪机前端面与子弹弹底发生碰撞使子弹速度瞬间从零加速到约75ms 。由于子弹撞击枪管尾部坡部,受到枪管的阻力,加速度变小。随着子弹逐渐水平,加速度再次成为常量。闭锁之后子弹加速度和速度的骤减,位移趋于常量。子弹最大速度为242.1 m/s,即出枪口速度,可满足水下作战战术要求。
由运动学仿真图可以看出,长弹匣中水下特种弹可以顺利完成入膛动作并满足战术要求。
2.3 短弹匣动力学仿真
利用ADAMS软件的对长弹匣完成数据分析后,用同样方法可得出使用短弹结构中各部件的运动规律。图9 为短弹匣运动仿真曲线。
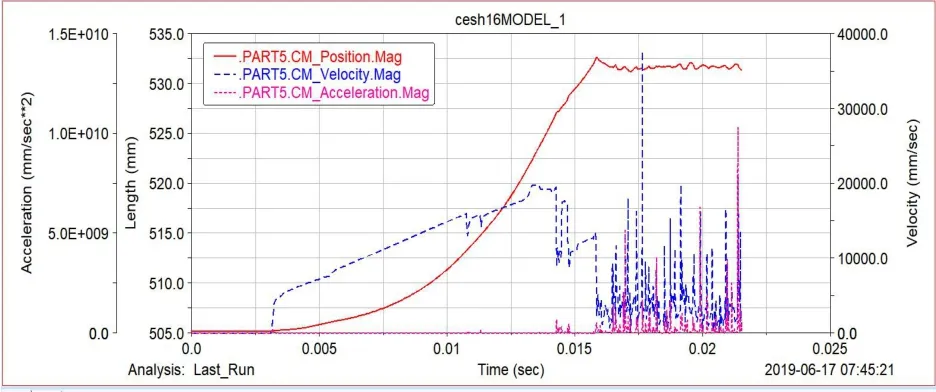
图9 短弹弹匣枪机复进运动曲线Fig.9 Reprograding motion curve of short magazine rifle bolt
在图9 中,实线曲线为位移-时间曲线,虚线曲线为速度-时间曲线,点线曲线为加速度-时间曲线。
在0-0.0031 s时间段内,枪机所受合外力为常量,枪机在复进簧的推动下运动。在0.0031 s之后,枪机与枪机框碰撞,加速度陡增,瞬间后,枪机与枪机框同速,其加速度再次变为常量,速度均匀增加。在0.0108 s和0.0118 s时间段内,枪机与子弹碰撞,速度陡降。瞬间后,子弹与枪机达到同速,枪机加速度再次变为常量,速度均匀增加。在0.0135 s时,子弹前端与枪管内壁以及闭锁件碰撞,枪机运动阻力瞬间增加,运动速度骤减。随着子弹入膛,其所受阻力减小,枪机加速度增大。在0.0167 s时,子弹近似水平地在枪管中运动,枪机受合外力再次趋于常量,加速度恒定,速度均匀增加。最后子弹弹底缘撞击枪管尾部配合面,枪机在极短的时间中发生猛烈碰撞出现抖动,加速度出现了急剧变化,其速度在完全闭锁后变为零。
如图10 所示,在0-0.108 s过程中枪机尚未与子弹发生接触,故速度和加速度均为0。在0.0110 s之后,枪机前端面与子弹弹底发生碰撞,加速度曲线出现峰值,子弹速度瞬间从零加速到约145.5 m/s.由于子弹撞击枪管尾部坡部,受到枪管的阻力,加速度变小。随着子弹逐渐水平,加速度再次回归常量。闭锁之后子弹加速度和速度的骤减,位移趋于常量。子弹最大速度为922.6 m/s,即出枪口速度,可满足陆上作战战术要求。
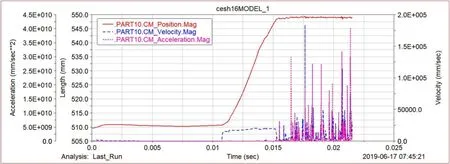
图10 短弹匣子弹入膛运动曲线Fig.10 The projectile movement curve of a short magazine
由运动学仿真图可以看出,短弹匣子弹可以顺利完成入膛动作并满足战术要求。
3 结论
通过对现有步枪类型、性能的分析,设计了一种能通用两种不同长度弹丸的两栖步枪,并对所设计的结构进行了三维实体建模与运动学仿真。根据运动学仿真分析,所设计机构能够完成不同长度的弹丸抽壳和枪机复进进弹动作。该步枪解决了同一步枪不同长度弹药通用问题,这对于提高武器的适用度和两栖作战有着重要的研究意义与价值[9]。
