无动量轮双模式纵向两轮平衡车关键技术研究
2022-08-30王倩颖傅怀梁杨永杰
王倩颖,傅怀梁,杨永杰
(南通大学 张謇学院,江苏 南通 226019)
0 引 言
随着计算机技术深度赋能出行领域,绿色出行理念深入人心,绿色交通大有可为。公共自行车作为城市交通的重要组成部分,给人们的出行和生活带来了很大便利,在推进绿色交通方面发挥着积极作用,但其日益增长的用户需求也给维护管理带来不小的挑战[1]。前后纵向双轮自平衡车是一种新型电动自行车,具有节能环保、方便快捷等优势,其小车模型的深入研究,对推进智能化自行车的辅助平衡与自主循迹发展,提高电动自行车安全性和管理效率,有着重要的现实意义。目前,此领域相关研究成果较少。王晓宇等[2]研究了两轮自平衡机器人的运动规律,建立了运动学模型,得到了机器人的数学模型,为机器人控制策略提供了理论依据;陈鹏展等[3]等针对两轮自平衡车姿态检测与平衡控制,设计了姿态信息反馈的PID控制器;牛雪娟等[4]设计了变倾角PID控制算法,提高了调节时效。上述成果主要围绕左右横向两轮平衡车如何提高姿态信息准确性展开,对前后纵向两轮平衡车姿态获取有借鉴意义。但是,因两者在控制策略上存在较大差异,并未能使前后纵向两轮平衡车功能更完善。赵明翰[5]等通过滑模控制器对前后轮平衡车体姿态平衡问题进行设计与仿真,也未能完全解决实际运行中存在的干扰问题。本文拟对前后纵向两轮平衡车关键技术进行研究,给出姿态解算策略和控制决策,以期提高前后纵向两轮平衡车的动态稳定性与实用性。
1 平衡车系统总体设计
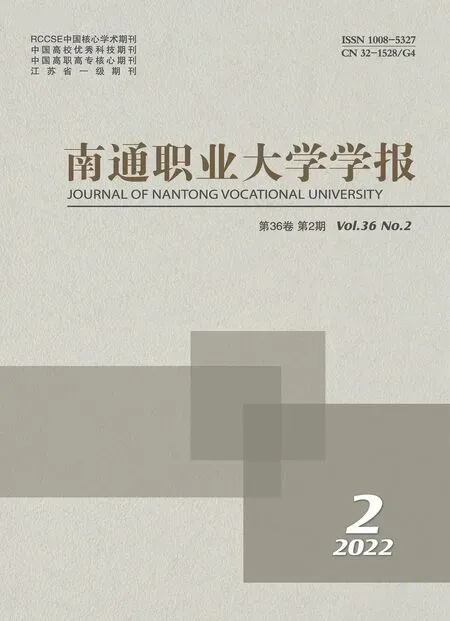
平衡车系统主要分电源模块、信号采集模块及舵机、电机模块三部分,平衡车系统结构框架如图1所示。
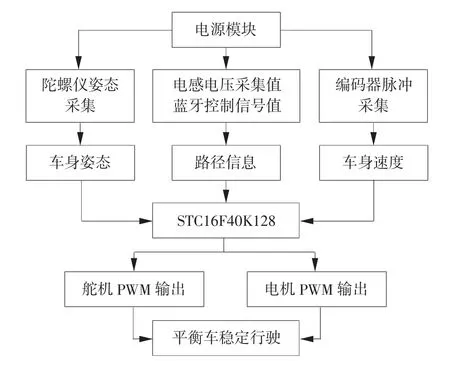
图1 平衡车系统总体框架
硬件设计要优先考虑满足平衡车重心低、左右质量均衡、整体轻巧的要求。其次,保证检测信号完整稳定。本文采用一体板设计,模块集中,并对电源进行合理分割,以保证硬件电路整体稳定。
(1)电源模块
采用7.4 V锂电池、充放电速率高的电容,以降低电源纹波的影响。考虑5 V器件,电源稳压模块采用高精度、低漏电稳压芯片MIC29302;考虑3.3 V电路功耗较小,采用TPS73633线性稳压芯片。
(2)信号采集模块
由ICM20602六轴运动跟踪装置采集姿态信号,经运算得到车身姿态;车速采用闭环控制,信号由512线编码器采集;采用精密配频电感获得电磁导引信号,经由OPA4377高性能运算放大器放大后,整流得到波动较小的直流电压信号,反馈路径信息,其排布方式为三横电感、两竖电感相间排布;采用主从蓝牙一体收发蓝牙信号,由主机输入操作指令。
(3)舵机、电机模块
驱动电路选用BTN7971b芯片,可提供较高的驱动电流,带过流保护功能,因驱动信号简单,且为小型号电机,故无需升压电路;选用S3010舵机,其性能好,响应速度快,扭矩大。
2 关键技术研究
采用虚拟示波器观察数据变化,并导出数据绘制波形如图2、3、4。
2.1 姿态解算策略
稳定准确的姿态解算是电磁平衡车平衡的基础。加速度计检测各方向的形变情况,得到受力数据,并转化为与实际三轴加速度呈线性关系的输出量。姿态改变时,三轴输出量也随之变化,且与倾角呈线性关系[3]。通过式(1)反正切运算可计算姿态角α,

其中,az、ay分别为z轴、y轴加速计输出的加速度信号,其易受高频噪声影响,波形如图2。由于单片机浮点数计算时对原始数据进行强制转换,精度不高,运算速度慢,且运行过程中加速度计输出信号不稳定,极易受舵机、电机转动振动的影响(波形见图3),故对其进行滑动滤波。
陀螺仪输出数据是弧度制角速度。旋转陀螺仪时,得到相应轴角速度参考量,并对时间进行积分得到角度。积分过程中,随着时间推移,陀螺仪积分误差逐步增大,其偏移波形如图4。同时,陀螺仪还存在零偏现象,即在平衡车静止时,三轴的输出量不为零,其偏移数据如表1。
加速度计与陀螺仪均可得到姿态角,考虑其优缺点,采用一阶互补滤波将其融合,如式(2),

其中:β为滤波输出角度;α为加速计反正切解算角度,陀螺仪角速度gx对时间进行积分可得到角度;β′为上次滤波输出角度;K1为常数,有K1∈(0,1),反映了对陀螺仪和加速度计的信任程度,当K1∈(0.5,1)时,更信任加速度计解算角度。基于一阶互补滤波原理,引入角度偏差Δθ如式(3),可将式(2)改写为式(4)。


图2 加速度计受噪声影响波形
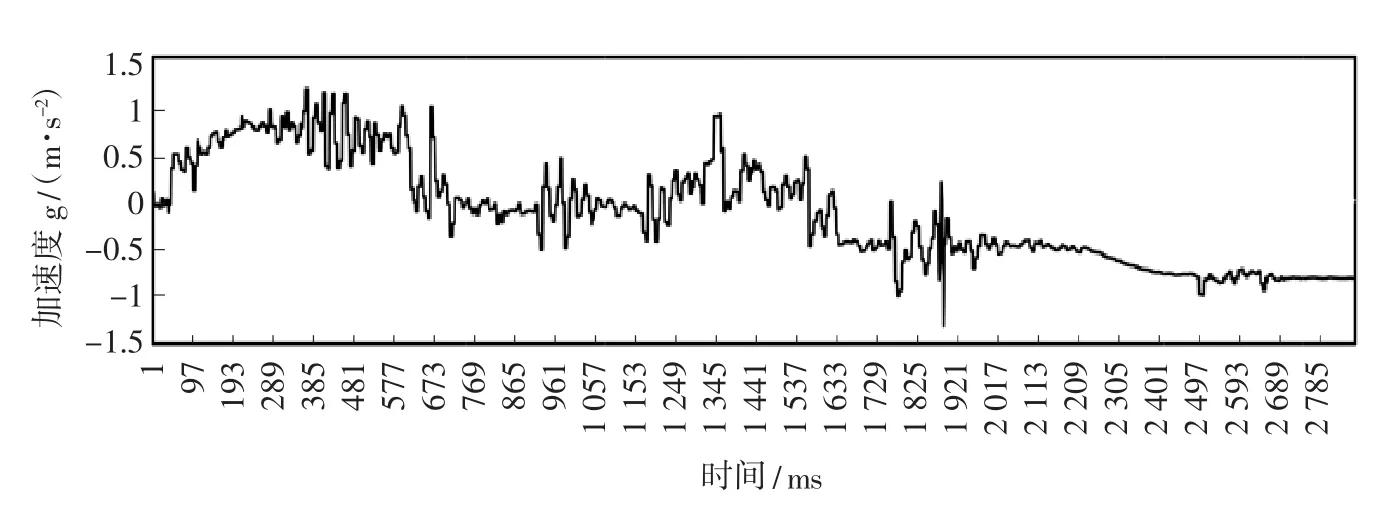
图3 加速度计受振动影响波形

图4 陀螺仪积分偏移波形

表1 陀螺仪零偏数据 (rad/s)
由式(4)可见,角度融合过程可理解为信任分配后再加权。角度偏差乘以权重系数K1,可矫正陀螺仪的积分误差,即通过长期融合加速度计角度,抑制陀螺仪的积分误差。对于陀螺仪角度零偏问题,可通过引入偏差权重系数(1-K1)进行积分矫正。
在整定滑动滤波窗口数与互补滤波权重系数K1时,主要根据波形特点进行参数调节。当角度发生较大变化,滤波后波形不能及时跟随加速度度计波形变化时,陀螺仪曲线偏移较为严重。增加K1,波形将进一步随加速度计波形变化,但K1不能过大,否则将导致输出的角度波形不平滑。经实验测试,得到加速度计数据滑动滤波波形如图5、图6。其中:图5窗口数大,能更好地滤去高频信号,但滞后性明显;而图6窗口数相对较小,能滤去较多高频信号且波形滞后性不明显。经由互补滤波后的波形如图7。由图7可见,陀螺仪解算的瞬时角度较为准确,但由于存在零偏和积分误差,需进行互补滤波才能实现波形的长时间稳定平滑。

图5 窗口数大的滑动滤波波形
图6 窗口数小的滑动滤波波形

图7 一阶互补滤波波形
2.2 控制决策
2.2.1 速度PI单环控制
由于系统变量较多,变量间有一定关系且相互影响,若单纯对其进行数学建模,难以全面考虑外界的干扰因素,仿真预测与实际调节效果存在较大差距。
为解决舵机、电机的耦合关系带来的参数难以调节与优化问题,设定高低速两种模式,以减少参数调节。
对于速度控制,采用增量式PI闭环算法,调节参数可得到PWM波输出。在粗调中可采用低速,保证在有阻力情况下,电机有明显的抗阻力;在精调中,利用上位机观察波形、调整参数,保证转速均匀且快速响应。
由于积分作用,PID控制器的输出不断累加增大,易导致输出超过电机与舵机的物理极限值,达到饱和区。进入饱和区后,虽会出现反向偏差,开始退饱和,但在饱和与退饱和阶段,控制器损失部分纠错能力,会影响闭环系统对外部输入控制量的快速响应,严重时甚至导致系统振荡、控制失效。对此,可采用积分分离,不累加异常积分值,以避免高频进入并滞留在积分饱和区域。
2.2.2 平衡控制
理想状态下,由于舵机转角与车身倾斜角度存在关联,当速度、车身倾斜角度固定时,需要改变舵机转角以提供控制回复应力,用于保持车身平衡。可采用舵机位置式PID闭环控制与舵机限幅来调节车身小倾斜情况下舵机转角,其输入为稳定平衡时期望的车身倾斜角度,输出为舵机转角,算法如式(5)。

式(5)中,KP为比例系数,Kd为微分系数、Ki为积分系数,其值均为常数;e(t)为本次角度与上次角度的差值。考虑陀螺仪的积分误差对系统的影响,改进PID控制算法,去除原微分环节,用陀螺仪角速度作为微分项,算式为:

其中,gm为陀螺仪角速度。整定PID三个环节系数KP、Kd、Ki。其中:比例环节系数KP调节车体回复力,可保证平衡车直线稳定行驶;位置式积分环节系数Ki与改进的微分环节系数Kd调节阻尼力,可确保平衡车平稳通过微颠簸路面。特别地,舵机输出需要进行限幅,以保证其输出在舵机物理极限值范围内。设定的限幅过大,会造成调节过度,即舵机转角过大,使平衡车瞬间失去平衡摔倒;反之转角过小,则无法及时调正行进方向。
2.2.3 串级控制
串级控制系统是在过程控制中采用了两个控制器串联工作的方式,即运用外环控制器的输出作为内环控制器的输入,并由内环控制器的输出操纵控制阀,达到提高控制质量的目的[6]。
传统实例中,速度控制器与角度控制器采用双闭环串级控制,角度控制器的输出能够反馈给速度控制器[7]。本串级控制系统采用两个PID控制器,且舵机角度控制器和电磁输出各自为闭环,但舵机角度控制器的输出操作值不反馈至电磁闭环,也不参与电磁输出值决策。具体而言,在舵机内环中,输入是车身姿态角,输出为舵机转角,在一定范围的倾斜角度下,该内环可控制车身保持稳定。若左倾,舵机左转,并保持平衡;反之,舵机右转,并保持平衡。将电磁闭环作为外环的目的,是将电磁路径信号转换为设定的车身姿态角。当电磁引导信号下需要左转时,将舵机内环输入设定为当前左转时需要的左倾斜姿态角,此时舵机将左转,车身也会左倾,并在舵机内环作用下保持平衡。其控制流程如图8。

图8 串级控制流程示意
2.2.4 蓝牙手柄控制模块
根据主从蓝牙原理,将手柄设置为主机,平衡车蓝牙为从机,并通过摇杆电位器进行信号值设定。当摇杆电位器舵机转轴旋转,电阻改变,脉冲宽度改变,可得到相应电压差。控制模块再根据输出的不同电压差,设定不同的操作输入指令。
3 实验验证
实验分为平衡车直立平衡检测、有指令控制平衡检测两个过程,主要完成两项验证任务:
一是在有电磁引导信号时,跟随电磁引导线,完成指定路径任务,包括直线、十字、折线、坡道行进。平衡车上电后,按下启动按钮,开始电磁自主循迹,通过十字电磁线交叉处,不减速,直线行驶;通过折线和直角处,转弯减速慢行;通过坡道处不减速。
二是在没有电磁引导信号时,跟随蓝牙控制信号,完成指定任务,包括左右转弯、转圈、加速、减速与停车。
实验测试数据如表2。表2测试结果表明,在上述控制方法下,前后纵向两轮平衡车姿态信息准确、动态稳定性好、适应性强。

表2 实验测试数据
4 结束语
本文对前后纵向两轮平衡车关键技术进行研究,不采用动量轮,即不利用辅助动量轮获得静态平衡,而利用车体内部传感器,获取准确的姿态信息,再由微处理器发出驱动指令,精确驱动舵机、电机转动,实现动态平衡。在姿态解算后,经由互补滤波器将滑动滤波后的加速度计数据与陀螺仪数据进行融合,可提高姿态信息准确性;在平衡控制方面,只设置高速与低速两种模式,降低舵机、电机耦合关系的影响,可简化参数调节;在整车系统上,设置电磁自主循迹、蓝牙遥控双模式,可适应更多场景。实验结果表明,提供的姿态解算策略、控制决策可行,提高了平衡车的动态稳定性与实用性。