基于元胞自动机的附加导流岛型出口仿真建模
2022-08-30陈永恒李浩楠吴场建李婉宁
陈永恒,李浩楠,吴场建,李婉宁
(吉林大学,交通学院,长春 130022)
0 引言
快速路出口是常见的交通瓶颈。为保证主路高速车流顺利汇入辅路并避免交通拥堵向主路蔓延,常采用增设集散车道的方式减轻出口的瓶颈效应。然而,当道路建设条件不足以增设集散车道时,主辅路通过分隔带开口直接衔接,仅能通过设置道路软隔离设施引导主路车流的驶出。实际的交通组织形式尚无统一的规范和命名,本文根据具体软隔离设施的不同,将其进一步划分并命名为直接开口型出口和附加导流岛型出口。在不设集散车道的情况下,快速路出口实际上是位于指定位置的分隔带短开口,释放效率低,易形成出口瓶颈。
已有学者对出口匝道交通流进行了一定的研究,主要集中在出匝换道行为以及交通拥堵特性两方面。在出匝换道行为方面,现有研究侧重于换道行为模型的建立以及换道风险的讨论。例如,ZHANG 等[1]建立了出匝车辆换道时选择目标车道的离散选择模型;钟异莹等[2]通过细化换道决策行为建立了分流区车辆的跟驰换道模型;张兰芳等[3]提出了基于逻辑回归的出匝换道风险量化方法。在交通拥堵特性方面,部分学者基于出口匝道区域的实测数据展开研究。例如,SUN等[4]发现当出口区域车道占有率达到30%后,拥堵便会横向扩散;李晓庆等[5]通过分析实测数据发现,出口匝道瓶颈区存在早发性交通拥挤现象;WU 等[6]发现出口匝道区域外侧车道存在通行能力显著降低现象。由于实测数据在获取上的困难,另有学者利用元胞自动机(Cellular Automata,CA)离散仿真手段分析出口匝道交通拥堵特性。例如,JIA等[7]分别建立了设有和未设有出车道的出匝系统CA 模型,并讨论了两种情况下的拥堵状态;江金胜等[8]利用CA 模型探讨了双下匝道系统的交通特性,并分析了诱导控制对于缓解出口瓶颈拥堵的效果。上述研究从不同角度对出口匝道交通流进行了分析,然而,大多基于具有集散车道和出口匝道的理想快速路出口场景,主辅路车流不存在直接干扰,与道路建设条件有限时主辅路直接衔接的非常规设计形式存在较大差异。在直接开口型出口下,辅路车流对主路驶出存在直接干扰,使得主路车辆的驶出优先权难以得到保障。相比之下,附加导流岛型出口通过在辅路设置导流岛,引导辅路车流对出口的规避,以缓解直接干扰。然而,导流岛的设置一方面导致辅路形成道路缩减瓶颈;另一方面,强行迫使辅路车辆向外侧车道并道,对交通流的运行造成较大影响。考虑到附加导流岛型出口不同于常规快速路出口的特殊几何设计特点以及对交通流造成的较大影响,有必要探讨其设置下的交通流运行状态及其合理性。
综上,现有关于快速路出口的研究大多对道路几何条件进行了理想化假设,对于道路建设条件受限情况下的出口交通组织形式及交通特性关注不足。本文讨论附加导流岛型出口这一建设条件受限时的特殊出口组织形式。针对主辅路直接衔接的几何构造特点以及导流岛设置下的车辆运行特性,本文引入3种换道规则,并分段设定,以描述附加导流岛型出口影响下的车辆换道行为,同时,对主辅路直接衔接形式下主路车辆的驶出过程等效简化,构建针对附加导流岛型出口的CA 模型。利用微观仿真手段分析附加导流岛型出口对交通流造成的影响,有助于理解道路条件受限时的交通流状态,为快速路的交通组织和管理提供参考。
1 模型基本描述
1.1 附加导流岛型出口的交通特性
快速路出口常设有集散车道,采取如图1(a)所示的交通组织形式。当快速路建设条件有限而难以增设集散车道时,实际采用的交通组织形式如图1(b)和图1(c)所示。其中,图1(b)中仅利用软隔离设施设置单向短开口,本文将其命名为直接开口型出口,是一种简单直接的设计形式;图1(c)中通过增设导流岛引导车流,本文将其称作附加导流岛型出口。
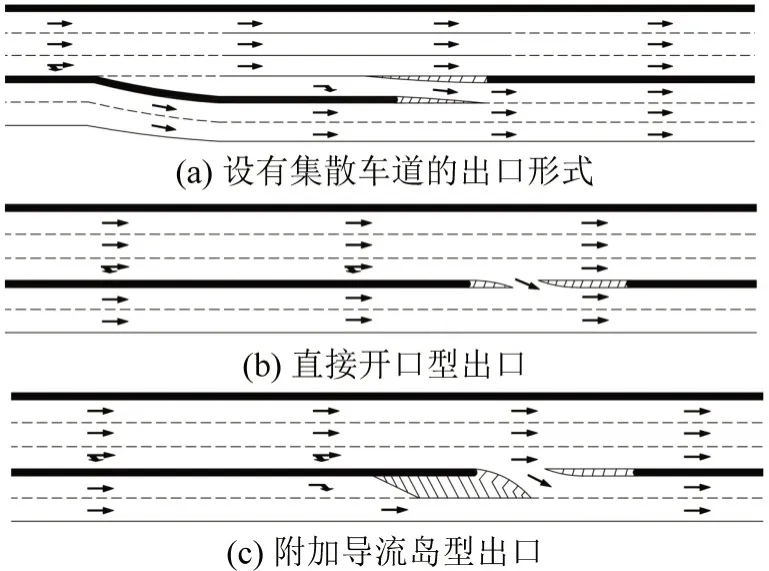
图1 快速路出口Fig.1 Exit of expressway
附加导流岛型出口通过占用辅路设置导流岛保障驶出车辆对出口的专用权,在导流岛引导和保护下,主路车辆更容易驶出。但是,这种做法是在无法设置集散车道的情况下为了保障主路驶出优先的无奈之举,存在一定不合理之处。首先,主辅路通过短开口直接衔接,道路平面线形不平缓,驶出车辆为顺利驶出需提前相当长的距离开始减速行驶。其次,导流岛占用辅路形成辅路瓶颈,导致辅路车辆排队的频繁发生,如图2(a)所示。此外,导流岛强制辅路车流在出口前绕行避让,违背了部分驾驶员的意愿,易引发车辆在导流岛下游的强制换道。一方面,快速路的辅路常与支路相连,承担短距离交通集散作用。当出口下游有临近的入口时,支路汇集到辅路的车辆往往希望在辅路内侧车道行驶,以便在下游入口驶入主路。在被迫换道到外侧并通过辅路瓶颈后,这部分车辆会重新换道回到内侧车道。另一方面,部分驾驶员的驾驶习惯也是车辆经过导流岛后强制换道的原因。本文将此类经过辅路瓶颈后重新向内侧车道换道的行为称为目的性强制换道,该换道行为容易对低速的驶出车流队列造成干扰,并引发车辆减速甚至停滞,如图2(b)所示。
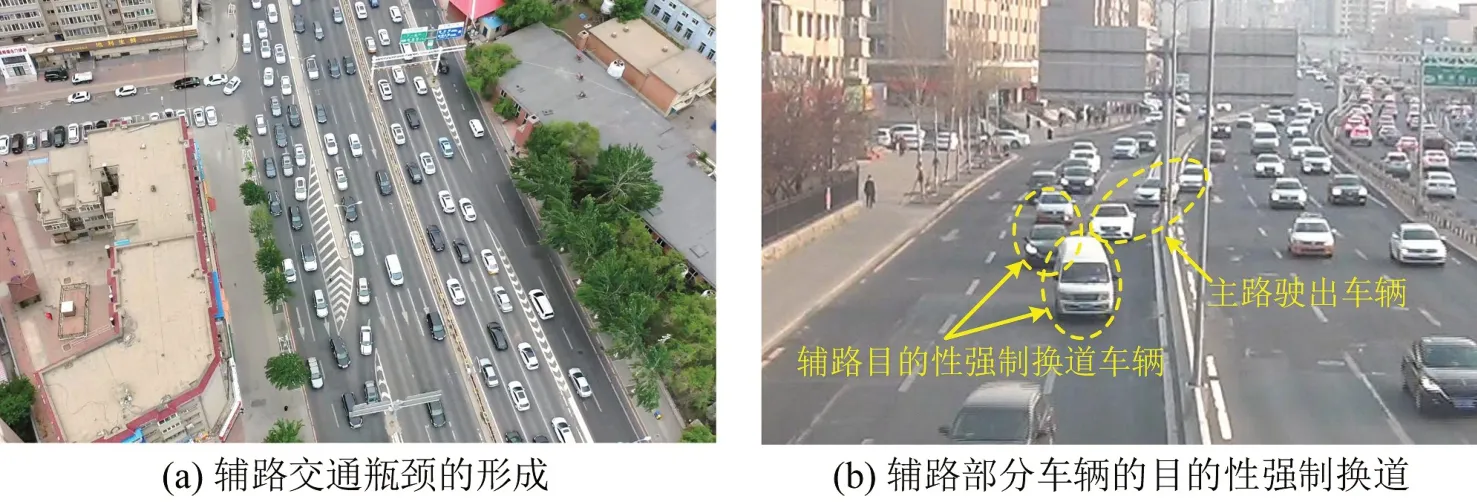
图2 附加导流岛型出口的交通特性Fig.2 Traffic characteristics of additional channelization island type exit
1.2 模型场景及路段划分
通过构建多车道CA模型模拟附加导流岛型出口设置下的快速路交通流运行情况,模型场景如图3 所示。快速路主路通常是单向3 车道及以上,为简化模型,同时,较真实地反映主路的交通状态,模型中只考虑主路的外侧2 个车道。辅路包含车道1 和车道2,主辅路之间采用硬隔离的形式分离。根据车流在各段的运行情况将研究场景划分为4个路段:路段A和路段D是出口上游和下游的正常路段;路段B是合流段,在该路段,车道1的车辆逐渐并入车道2,以绕过导流岛;路段C是导流岛引发的辅路瓶颈段。
快速路路段的总长度lroad为2.5 km。较小的元胞尺寸能够减少位移累加更新导致的迟滞效应[9],因此,本文将单个元胞对应的实际长度设定为2.5 m,即将路段等分为1000个元胞,如图4所示。
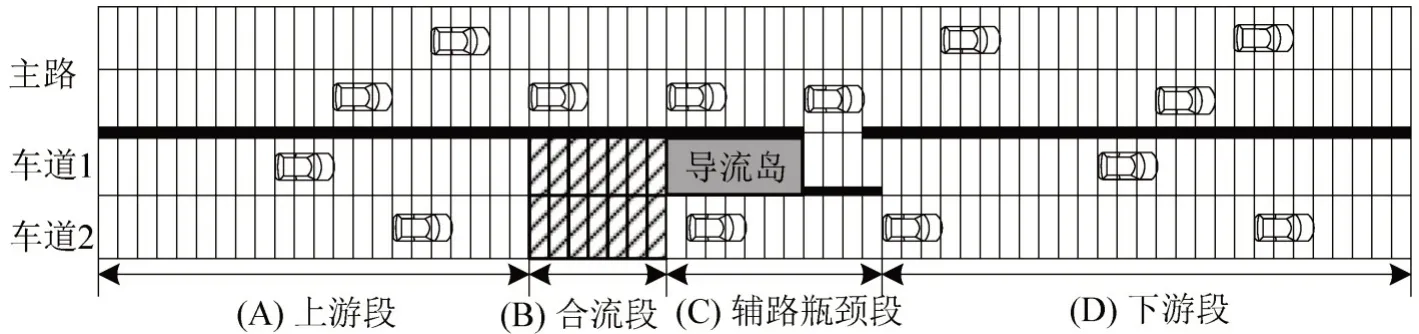
图4 研究路段的元胞划分Fig.4 Cellular division of research road section
模型中单个车辆的长度lveh为3 个元胞,主路出口位于第527 和第529 个元胞之间,其长度仅允许单个车辆通过。合流段位于第488和第513元胞之间,如图4中阴影部分所示。
2 模型建立
2.1 车辆直行规则
车辆的直行规则采用基于三相交通流理论框架的KKW模型[10]。由于其引入了速度自适应以及速度波动机制,故能够再现亚稳态和回滞等实测交通现象,更符合快速路的实际交通状态。KKW模型由确定性更新和随机性更新两部分构成。
(1)确定性更新

式中:vi(t)、xi(t)分别为第i辆车在时间步t的速度、位置;(t+1) 为第i辆车在下一时间步的确定性速度;vs,i(t)、vdes(t)分别为第i辆车的安全车速、期望车速;vmax为最大车速;a为加速度;τ为时间步长;gi(t)为第i辆车与其前车之间的空元胞数;sign()为返回表达式的符号;同步距离Di为速度自适应的作用范围,其线性形式为
式中:k为正常数。
(2)随机性更新
式中:ηi(t)为速度的随机扰动项;rand()为返回一个0~1的随机数;pa为随机加速概率;pb为随机减速概率;vp,pa1,pa2,p0以及p均为模型参数。
经过确定性和随机性更新后,车辆更新位置为

由于主路和辅路的功能和性质差异,vmax应设置不同的取值,本文假设主路和辅路车辆的最大速度分别为vmax1和vmax2(vmax1>vmax2)。在附加导流岛型出口下,由于不具备集散车道,分流车辆在出口上游提前减速,并对直行车辆造成一定影响。本文将分流车辆提前发生减速的主路路段称为分流影响区。在分流影响区内,主路分流车的最大速度设为
2.2 车辆换道规则
车辆的横向移动通过设置换道规则实现,本文引入3种换道规则,以匹配附加导流岛型出口影响下车辆的不同换道行为。
(1)对称换道规则
式中:di(t)o,pred、di(t)o,succ分别为第i辆车与相邻车道前车、与相邻车道后车之间的空元胞数;vi(t)o,succ为相邻车道后车的速度。式(10)和式(11)为车辆的换道动机,表示车辆受到前车阻挡以及在相邻车道上可以达到更高的速度。式(12)为换道的安全条件。车辆满足式(10)~式(12)则以概率plc发生换道。该规则用来描述车辆为追求更高速度而换道的行为。
(2)驶出换道规则

式(13)为当目标车道能够满足车辆以期望速度行驶的需求或者无论是否换道车辆均无法前进时,若满足安全条件,车辆换道。式(14)为当相邻车道前方有空间并且当前车道的行驶条件相比之下并没有好很多时,若满足安全条件,车辆换道。车辆满足式(13)或式(14)则发生换道。该换道规则用来描述主路车辆在分流影响区为了从出口驶出而换道到外侧车道的行为。
(3)强制换道规则

式(15)为目标车道前方有空间,式(16)为换道的最基本安全条件。若式(15)和式(16)得到满足,车辆发生换道。该换道规则最为宽松,用来描述车辆受道路条件影响或自身特殊驾驶需求引发的强制换道行为。
根据各路段的换道行为特性应用相应的换道规则。在主路的分流影响区内,外侧车道的驶出车不发生换道,而内侧车道的驶出车需要换道到外侧,这种换道行为采用驶出换道规则。如果驶出车直至出口都无法换道到外侧,则停留在出口处等待换道时机。此外,主路的非驶出车为追求更高行驶速度而换道,这种换道行为在两个车道间对称发生,采用对称换道规则。
辅路的换道行为较为复杂,应分段设定。在上游段A,辅路两个车道间的换道行为采用对称换道规则;在合流段B,车道2 的车辆无需换道,车道1的车辆需逐渐向车道2 合流。在该段采用强制换道规则,若直至导流岛前方都未能换道,则停留原地等待机会。当辅路流量较大时,由于车道2车流连续通行,换道条件始终无法满足,会造成“死锁”现象[11]。然而,这与实际情况下车辆交替通行和争夺路权的现象不符。因此,设置概率pgrab反映车辆间的路权争夺行为。若导流岛前方有正在等待的车辆,则车道2 的车辆在进入辅路瓶颈路段时有pgrab的概率被等待车辆抢行。被抢行的车道2车辆需等待车道1停留车辆换道到外侧后再继续前进。
在辅路下游段D,通过辅路瓶颈段的合并车流中的部分车辆选择重新回到原来的车道行驶,这与驾驶员自身驾驶习惯以及通过下游入口驶入主路的需求有关,本文将这部分车辆称为目的性车辆。目的性车辆按照强制换道规则由车道2向车道1换道,假设在输入的辅路车辆中,目的性车辆的比例为ppurp。下游段D 的非目的性车辆在两个车道之间对称换道,采用对称换道规则。
2.3 车辆驶出规则
在主辅路直接衔接的形式下,主路车辆只能在指定位置的短开口驶出,其过程类似于在指定地点的强制换道。因此,在元胞空间中,将附加导流岛型出口等效为图5所示形式。
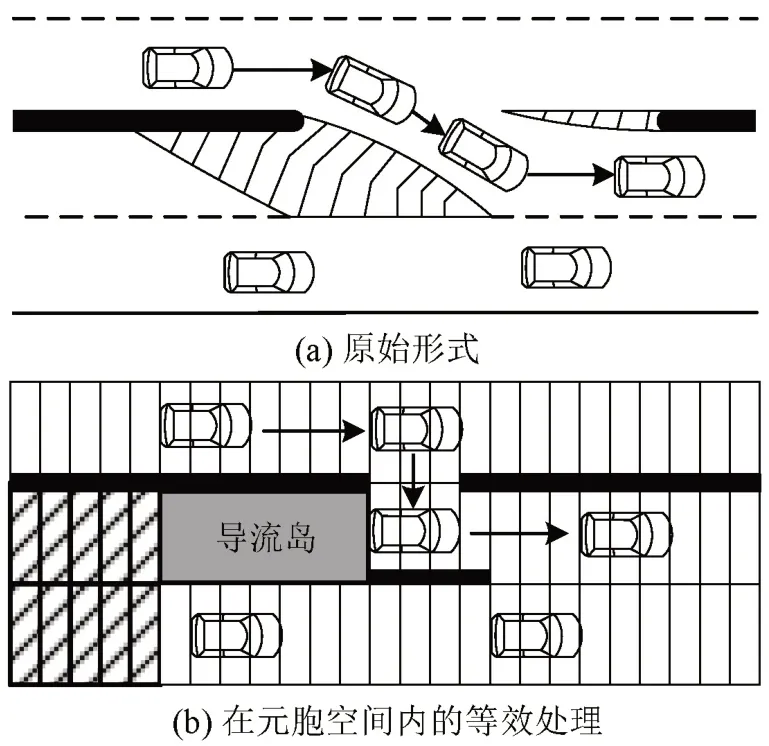
图5 附加导流岛型出口在元胞空间的等效处理Fig.5 Equivalent treatment of additional channelization island type exit in cellular space
其中,由于这样的出口形式仅能释放单列车流,在模型中将出口长度设定为单个车辆的长度。此外,通过禁止辅路车辆在出口处的分流模拟导流岛末端对车辆驶出的保护作用。具体而言,主路车辆经由出口驶出的过程可等效简化为如下驶出规则:
(1)输入系统的主路车辆以概率pout产生驶出需求,pout为主路驶出车辆的比例。
(2)对于需要驶出的车辆m,若按照直行规则,即将跨越出口,则首先减速到出口处,其速度更新规则为

式中:Dm,exit(t)为车辆m在时间步t与出口间的距离。不需驶出的直行车辆则不会减速到达出口处,而是按照正常直行规则前进。
(3)车辆m到达出口后立即判断是否有换道驶出到辅路的条件。由于导流岛的存在,驶出车无需考虑后方的安全条件,则驶出条件为

式中:dm(t)o,pred为车辆m在时间步t与相邻辅路前车之间的空元胞数。驶出车m满足驶出条件则换道驶出;否则,在原地等待。
2.4 直接开口型出口的CA模型
为了进行必要的对比,将上述车辆更新规则简化,以建立直接开口型出口的CA 模型。在直接开口型出口的CA 模型中,车辆的直行规则与上文所述一致。车辆的换道行为较为简单,因此。不再进行路段的划分。除驶出车外,主路和辅路双车道之间各自按照对称换道规则进行换道。由于主路车辆具有驶出优先权,因此,往往较为激进地主动驶出,此时,主路驶出车m在驶出时只需满足

除上述设定外,模型的其他设定均与附加导流岛型出口保持一致。
2.5 边界条件
模型采用开口边界条件[12]。在每个时间步,对于每个车道,若尾车位置xlast满足xlast>vmax+lveh,则以一定的进车概率输入1辆速度为vmax的车辆到元胞min[]xlast-vmax-lveh,vmax。其中,主路和辅路的单车道进车概率分别为pmain和pside。同时,若车辆超出道路末端边界,则直接将其删除。
3 仿真与结果分析
按照上述规则执行仿真,仿真步长为1 s,单次仿真持续3600 时间步。为了消除初始化的影响,舍弃每次仿真的前800步。同时,对每组数据重复仿真50次以消除随机因素的干扰。仿真关键参数的默认取值如表1所示,其中,KKW模型参数参考文献[10],其余参数由长春市亚泰大街快速路上一处附加导流岛型出口的实地调查结果近似估算。
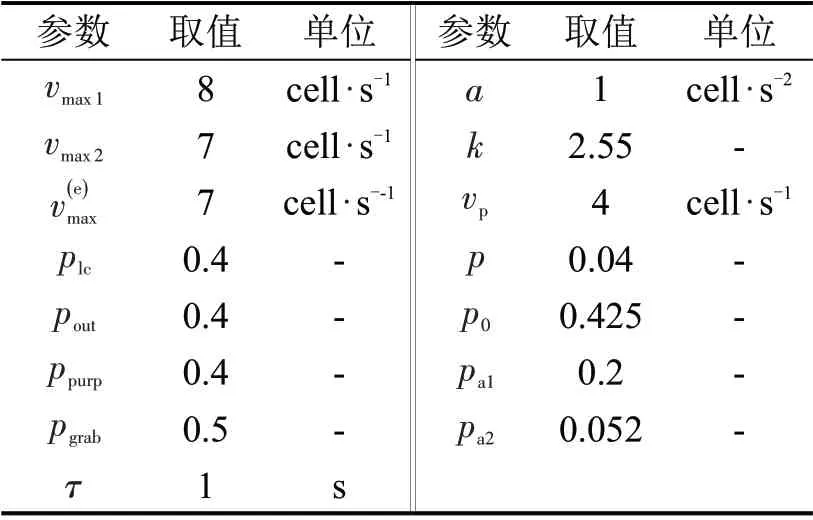
表1 仿真关键参数Table 1 Key parameters of simulation
3.1 时空图分析
当不发生目的性强制换道时(ppurp=0),两种出口的时空轨迹图如图6所示。

图6 不同出口形式下的时空图Fig.6 Spatial-temporal diagrams under different exit forms
可以发现,在相同的进车概率下(pmain=pside=0.2),两种出口形式对应的时空状态具有明显差异。附加导流岛型出口下,车辆驶出较为顺畅,主路交通流整体处于自由流状态,并未出现拥堵,如图6(a)所示。在辅路,车道1 上出现了明显的带状空白区域,这是由于导流岛使得车辆绕行所致。导流岛引发的道路缩减瓶颈使得辅路两个车道都受到一定程度的影响:一方面,车道1 车流在合流段陆续向外侧换道,导致车道2频繁发生局部的轻微拥堵,如图6(c)所示;另一方面,由于发生在合流段的换道行为较为集中,车道1上部分车辆未能及时换道,只能被迫停在导流岛前等待,形成轻度的拥堵排队,如图6(b)所示。在直接开口型出口下,辅路车流造成的直接干扰使得车辆驶出受阻,主路出口前出现频发的车辆拥堵排队,如图6(d)所示。驶出车辆直接汇入到辅路并在车道1 出口位置频繁引发轻微拥堵,然而,这种拥堵能够及时消散并且没有显示出向外侧车道的扩散,如图6(e)和图6(f)所示。上述现象说明,附加导流岛型出口能够通过强制辅路车流的规避,降低辅路车流对驶出行为的干扰,削弱出口瓶颈对主路交通的影响。然而,导流岛对辅路的占用也使得辅路两个车道因合流而相互影响,在较大的交通需求下极易在辅路上游引发持续的排队拥堵。
为分析在附加导流岛型出口下目的性强制换道行为的影响,分别在ppurp=0.0 和ppurp=0.5 时进行仿真,结果如图7所示。

图7 不同ppurp 下附加导流岛型出口的时空图Fig.7 Spatial-temporal diagrams of additional channelization island type exit under different ppurp
为明显观察到目的性强制换道的影响效果,将主辅路的进车概率均设置为较大值0.35。可以发现,由于交通需求的增大,主路出口的瓶颈效应凸显,频发和影响范围较大的排队拥堵在主路上游形成。相较于ppurp=0.0 的情况,当ppurp=0.5 时,主路拥堵影响的时空范围明显扩大,如图7(d)所示。此外,受辅路瓶颈的影响,在观测时段内辅路上游均陷入持续的排队拥堵状态。当ppurp=0.0 时,车道1和车道2 下游交通状态稳定。辅路车流合并后汇入车道2 行驶,使得车道1 的下游段充分发挥出口辅助车道的作用,驶出的车流行驶顺畅,如图7(b)和图7(c)所示。然而,当ppurp=0.5 时,辅路车流的目的性强制换道对车道1的平稳交通流造成扰动,车道1 下游频繁出现明显的局部拥堵斑点,如图7(e)所示。此时,车道1 下游段被驶出车流和部分辅路车流共同使用,难以充分发挥辅助车道的作用。目的性强制换道引发的局部拥堵使得辅路的出口下游交通状况恶化,导致释放到辅路的驶出车辆难以进一步疏散,进而影响出口的释放效率,削弱附加导流岛型出口的实施效果。
3.2 流量分析
设置虚拟探头分别采集主路和辅路的流量,以探讨流量随进车概率的变化。虚拟探头分别设置在各车道的第300 个元胞,位于出口上游。设Qmain为主路两个车道的总流量,Q1和Q2分别为辅路车道1 和车道2 的流量。流量随进车概率的变化如图8所示。
图8(a)为辅路流量与辅路进车概率pside的关系。可以发现,当主路进车概率pmain分别取0.0 和0.4时,辅路流量没有明显差异,说明辅路车辆的通行主要受限于导流岛造成的辅路瓶颈。随着pside的增加,辅路两个车道的流量整体上具有相似的变化趋势。当pside<0.25 时,Q1和Q2呈现几乎一致的线性增长趋势。当pside达到0.25后,随着进一步增加,辅路瓶颈处的车辆到达率超出瓶颈自身的通行能力,辅路瓶颈前排队拥堵形成,并向上游蔓延,导致辅路上游交通流进入拥堵状态。因此,Q1和Q2相继达到稳定值,分别为831 veh·h-1和964 veh·h-1,取决于辅路瓶颈的通行能力。可以观察到Q1的稳定值低于Q2约13.8%,造成这种现象的原因是,车道2未被占用,车辆无需换道即可连续通行。而车道1 由于受到导流岛的占用,需要换道到车道2 才能通行,因此,车道2的车辆具有明显的通行优势。

图8 流量随进车概率的变化情况Fig.8 Variation of flow volume with entry probability of vehicles
主路流量Qmain与主路进车概率pmain的关系如图8(b)所示。Qmain受出口瓶颈的影响,并与辅路车流的干扰有关。因此,分别在目的性车辆比例ppurp=0.0,0.2,0.4,0.6 的情况下进行多次仿真。仿真时pside的取值为0.4,此时,辅路流量已达到饱和。可以发现,随pmain的增加,Qmain呈现先线性增加再达到稳定的趋势。当pmain<0.2 时,在不同ppurp下的主路总流量Qmain随pmain的增加几乎无差别的线性增长,主路此时处于自由流状态,受辅路目的性车辆的干扰并不明显;当pmain超过0.2后,由于驶出流量的增大,目的性车辆的干扰开始显现;当pmain达到0.3 后,受出口的瓶颈效应影响,不同ppurp下的Qmain均达到饱和。具体而言,当ppurp分别为0.0,0.2,0.4,0.6 时,Qmain的饱和值依次为2056,2035,1997,1878 veh·h-1。说明目的性车辆经过辅路瓶颈后的强制换道会加重出口的瓶颈效应,造成主路饱和流量的下降。主路驶出车辆比例pout对主路饱和流量的影响如图9所示。
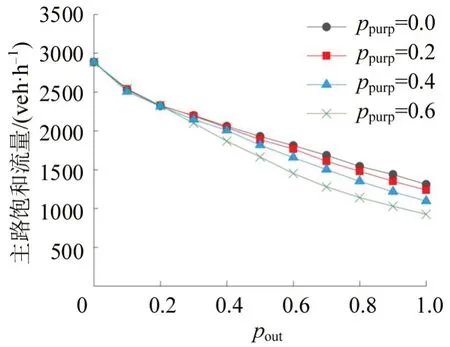
图9 pout 对主路饱和流量的影响Fig.9 Effect of pout on saturation flow of main road
由图9 可知,在不同ppurp取值下,主路饱和流量均随pout的增加迅速下降。说明由于不具备集散车道对驶出车辆的存储和缓冲作用,随着pout增加,驶出车无法得到及时释放,直接在主路的等待便会严重影响主路的正常通行。因此,附加导流岛型出口并不适合在交通流驶出需求较大的情况下实施。
3.3 速度分析
附加导流岛型出口的设置主要影响出口上游的交通状态,因此,本文讨论出口上游路段的平均速度。设Vmain为主路上游路段平均速度,V1和V2分别为车道1和车道2上游路段平均速度。平均速度随进车概率的变化情况如图10所示。
由图10(a)可以发现:当pmain≤0.2 时,随pmain的增加,Vmain变化幅度较小,并且在不同ppurp取值下,Vmain均保持在70 km·h-1左右。这是因为此时主路车辆到达率较低,主路车流完全处于自由流状态,出口瓶颈不会引发明显的阻塞。当0.2<pmain<0.4时,随着主路车流量的升高,出口的瓶颈作用开始逐渐凸显,不同影响范围的拥堵在出口前形成。一方面,使得Vmain快速下降;另一方面,使得目的性车辆的干扰效果也开始显现,随目的性车辆比例ppurp的上升,目的性车辆对驶出车流的干扰愈加严重,使得主路拥堵的时空范围扩大,Vmain依次较为明显的下降。当pmain达到0.4 后,较大的进车概率使得主路上游完全处于拥堵状态。此时,Vmain基本稳定,并且目的性车辆的干扰对主路交通流平均速度的影响有限。
辅路平均速度的变化趋势与主路类似,如图10(b)所示。当pside≤0.2 时,辅路完全处于自由流状态,辅路两个车道速度差别不明显;当pside>0.2 后,受辅路瓶颈的影响,V1和V2均以相似的趋势快速下降,反映了三相交通流理论的交通崩塌现象;当pside达到0.3后,观测时段内辅路上游的交通流处于拥堵状态,平均速度基本稳定。可以观察到,当pside>0.2 时辅路不再处于自由流状态,V1和V2出现较大差异。车道1 的车辆难以在合流段完成换道,在导流岛前形成排队,处于走走停停状态。车道2由于未被导流岛占用,车辆可以连续通行,具有更高的平均速度。具体而言,V1和V2分别稳定在9.0 km·h-1和14.9 km·h-1左右,导流岛使得内侧车道平均速度降低约39.6%。

图10 平均速度随进车概率的变化情况Fig.10 Variation of average speed with entry probability of vehicles
3.4 实施效果分析
将附加导流岛型出口与直接开口型出口进行对比,以定量分析附加导流岛型出口的实施效果。不同pside下两种出口形式的主路饱和流量如图11所示。
由图11可知,在直接开口型出口下,主路饱和流量随pside增加迅速下降,并且在pside达到0.45后稳定在约850 veh·h-1的极低水平。说明主路车辆驶出受辅路影响明显,在较大的辅路到达率下,车辆驶出困难,驶出车的等待严重影响主路通行效率。在附加导流岛型出口下,辅路车辆在出口前被迫绕行,对主路车辆驶出造成的干扰是相当有限的。使得主路饱和流量随pside增加没有明显的下降,而是维持在2123 veh·h-1附近。因此,相较于直接开口型出口,附加导流岛型出口能够通过限制辅路车流的直接干扰显著提升主路的通行效率。
两种出口形式下,不同pside对应的辅路总流量如图12所示。

图12 两种出口形式的辅路总流量对比Fig.12 Comparison of total flow volume of side roads in two exit forms
由图12 可知:当pside≤0.25 时,两种出口形式下辅路总流量并没有明显差异;当pside超过0.25后,随着其继续增加,在附加导流岛型出口下,受辅路瓶颈的限制辅路总流量达到饱和,饱和值约为1792 veh·h-1。然而,在直接开口型出口下,辅路总流量在pside达到0.5 前不受限制的持续增加,并最终达到约3050 veh·h-1的饱和值。相比之下,附加导流岛型出口下,辅路瓶颈的形成使得辅路总饱和流量下降约41%。
不同pmain和pout下的主路运行状态如图13所示。
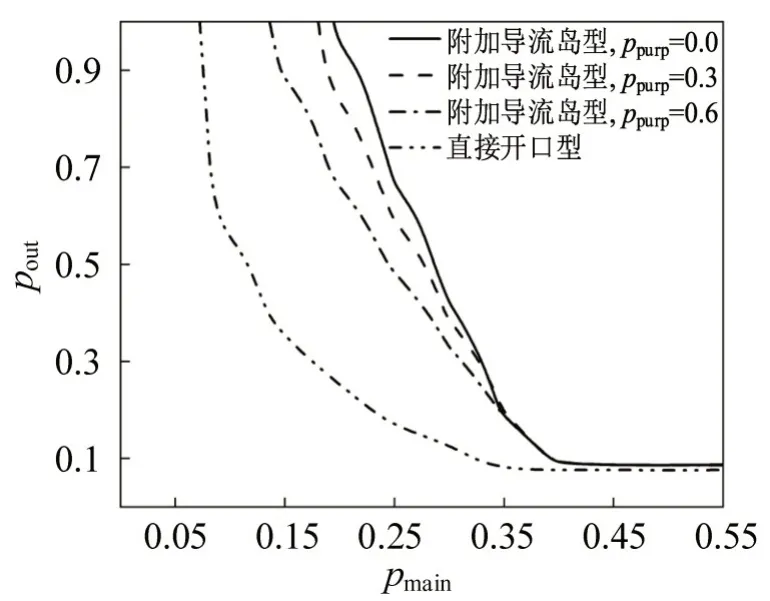
图13 两种出口形式下的主路运行状态Fig.13 Operation state of main road under two exit forms
在pmain-pout二维平面内,分界线的右上侧区域表示拥堵状态,左下侧区域表示非拥堵状态。拥堵状态的分界点以平均速度小于30 km·h-1为标准(参考《城市快速路设计规程CJJ 129-2009》中快速路饱和流状态的速度下限得到)。可以发现,相比于直接开口型出口,附加导流岛型出口的拥堵分界线明显上移,具有更大的非拥堵区域。说明附加导流岛型出口对于改善主路拥堵状态有显著效果。此外,目的性车辆比例ppurp的增加,使得附加导流岛型出口的拥堵分界线向左下侧发生一定程度的偏移,说明目的性车辆的干扰使得主路更易陷入拥堵状态。然而,相比于直接开口型出口,附加导流岛型出口仍具有更好的实施效果。
4 结论
附加导流岛型出口是道路建设条件受限时的一种特殊快速路出口形式。本文基于附加导流岛型出口的交通组织特点,建立了针对附加导流岛型出口的元胞自动机模型。模型能够较为准确地刻画在附加导流岛型出口设置下交通流的运行状态。研究发现:
(1)相比于无任何管理措施的直接开口型出口,附加导流岛型出口限制了辅路车流的直接干扰,能够缓解出口的瓶颈效应,显著提高主路的饱和流量。
(2)发生在辅路下游的目的性强制换道易诱发局部拥堵,影响驶出车流的进一步疏散,进而引发主路饱和流量和平均速度的下降,削弱附加导流岛型出口的实施效果。因此,附加导流岛型出口更适合辅路不受干扰的简单路况,在实施时应尽量远离入口、公交停靠站及支路等易诱发目的性强制换道的交通设施。
(3)在附加导流岛型出口下,由于不具备集散车道的存储和缓冲作用,主路饱和流量随驶出车辆比例的增加而下降迅速。因此,附加导流岛型出口不适用于驶出需求较大的情况。
(4)在附加导流岛型出口下,辅路的饱和流量受限于道路缩减瓶颈,相比于直接开口型出口降低约41%。由于辅路内侧车道被导流岛占用,车辆难以连续通行,其饱和流量和平均速度均明显低于外侧车道。
(5)附加导流岛型出口在改善主路交通状态的同时牺牲了辅路的通行效率,但考虑到辅路交通流非连续到达的特点,仍然具有一定的实施意义。