机载LiDAR与地面三维激光扫描在贵州水城独家寨崩塌地质灾害风险调查中的应用
2022-08-30何松标范宣梅
党 杰,董 吉,何松标,范宣梅
(1.贵州省地质环境监测院, 贵州 贵阳 550081;2.成都理工大学地质灾害防治与地质环境保护国家重点实验室, 四川 成都 610059)
0 引言
贵州岩溶山区地质环境脆弱,局部形成“上硬下软”、“软硬相间”且高差较大的复杂山体,给当地开展地质灾害风险调查工作带来一定难度。这些区域由于坡高、坡陡、人迹罕至,传统的地面调查手段很难有效地识别及测量潜在的高位隐蔽性地质灾害隐患。近十几年来,全国多起突发性地质灾害带来了巨大的生命财产损失,如2009年6月5日重庆武隆鸡尾山滑坡造成79人死亡,2010年6月28日贵州关岭岗乌滑坡造成99人死亡,2013年7月10日四川都江堰五里坡滑坡造成161人死亡,2017年6月24四川茂县新磨村滑坡造成83人死亡,2019年7月23日贵州水城鸡场镇滑坡造成52人死亡和失踪。这些惨痛的教训让人们更加关注地质灾害风险源的位置以及如何精准量测、评价。
许强等[1]针对高位隐蔽性地质灾害事件往往不在预案点范围内的现实问题,提出构建天-空-地一体化的“三查”体系进行地质灾害早期识别与监测预警:“天”即星载平台,利用光学遥感影像和合成孔径雷达干涉测量技术(InSAR);“空”即航空平台,利用机载激光雷达测量和无人机摄影测量技术;“地”即地面平台,利用地基SAR、三维激光扫描和地面调查等技术手段。
激光雷达测量技术(Light Laser Detection and Ranging,LiDAR)是近年来应用于地质灾害防治领域的新技术,其利用激光测距原理获取激光器与目标之间的距离,从而生成三维点云数据和数字高程模型(DEM),进而获取地质灾害体的各项地貌特征。由于其能很好地“穿透”植被,获取地表的真实特征,逐渐应用于地质灾害防治领域:谭德军等[2−3]运用机载LiDAR对重庆市奉节区竹园镇百步村高植被覆盖复杂山区开展地形测量和李子崖危岩识别,提出高植被覆盖区点云数据分类处理方法,显示出LiDAR技术对崩塌识别具有有效性和准确性;彭艺伟等[4]基于机载激光雷达对江苏省宜兴市竹海风景区公路边坡开展研究,成功分析和解译出一处隐蔽滑坡地质灾害,并提出了一套针对植被覆盖区小型地质灾害激光雷达快速识别的技术流程;贾虎军等[5]基于无人机载LiDAR和倾斜摄影技术对九寨沟九道拐滑坡进行研究分析,表明无人机载LiDAR和倾斜摄影技术在地质灾害早期识别方面具有较大的应用价值;郭晨等[6]利用机载LiDAR数据结合基于SVF的DEM可视化方法,开展了四川省丹巴县城周边135 km2的地质灾害识别研究工作,识别出146处地质灾害,并现场实地调查验证了机载LiDAR识别结果的可靠性;刘小莎等[7]基于高分辨率机载LiDAR数据结合震前卫星影像,开展了九寨沟震区的日则泥石流沟识别研究,根据色彩和纹理差异,解译出155处泥石流物源,为泥石流物源计算提供数据支撑。
三维激光扫描技术(3D Laser Scanning)最先在测绘领域应用,后凭借其高分辨率、高精度、非接触测量等优点[8],逐渐应用于地质灾害测量、监测领域:谢谟文等[9]基于三维激光扫描对云南省乌东德地区金坪子滑坡开展表面变形研究,通过三种方法比较分析点云数据,监测结果较传统监测方法具有很大优势;李强等[10]采用三维激光扫描对重庆市某采煤沉陷区地表变形进行监测研究,通过两期采集数据对比分析,得到点变形值、剖面线变形趋势、地表整体变形等监测结果;陆三福等[11]将三维激光扫描与结构面三维模拟技术应用于某跨江大桥桥址岸坡岩体结构调查中,高精度、高效率地获取了岩体结构特征;舒飞等[12]采用三维激光扫描技术对四川雅安天全县南部某泥石流灾害进行测量,通过获取高精度三维地理信息数据,为灾后重建提供第一手资料;褚宏亮等[13]利用三维激光扫描技术对高陡危岩、大型滑坡等复杂地质环境下地形构建、DEM建模及几何测量等快速调查方法进行讨论,并提出点、线、面相结合的变形监测方法;王梓龙等[14]以丹巴沙坝子危岩为例,研究了三维激光扫描技术在危岩体监测中的应用,并针对溜滑与掉块两种不同的破坏模式提出不同的监测思路;马福贵等[15]利用三维激光扫描对某典型地质灾害进行两次观测,对比分析和识别出危岩体特征及裂缝变化特征;薛强等[16]为分析子长县阎家沟滑坡的变形特征,对滑坡体进行两期三维激光扫描,基于获取的不同时期DEM数据开展变形分析,得到滑坡体的变形速率及变形量;梁玉飞等[17]通过三维激光点云快速获取四川省绵阳市安州区照壁岩滑坡的边界岩体结构信息,并基于HSV色彩重建对结构面直观显示,进而利用DBSCAN算法对结构面间距、延续性、粗糙度参数进行提取分析。
不同学者应用机载LiDAR或三维激光扫描技术开展地质灾害研究,多采用单一技术手段,且侧重于隐患识别,技术手段本身的局限性会导致部分结果不尽人意。机载LiDAR技术与三维激光扫描技术原理相似,都是基于激光测距原理确定测量对象的空间位置信息。在应用中,机载LiDAR多采用无人机载或者有人机载方式获取数据,三维激光扫描多采用地面扫描方式获取数据。机载LiDAR扫描由于从天空向下进行获取点云数据,对部分陡立的崩塌地质灾害难以获取危岩的坡面信息,而三维激光扫描从危岩带斜下方或正前方进行扫描获取数据,可以有效量测危岩的坡面岩体结构以及危岩特征信息。三维激光扫描技术在复杂环境下具有测量距离有限、受植被影响较大等局限性,而机载LiDAR则具有在一定程度上“穿透”植被的能力,可以获取高分辨率的数字高程模型(DEM)。将两种技术结合使用,可以有效的获取崩塌危岩带的高精度点云数据,进而对危岩带节理裂隙的产状、长度、宽度、间距等变形特征进行解译,分析确定地质灾害隐患的准确位置,量测崩塌(危岩)体积、范围等信息。本文以贵州省水城区鸡场镇独家寨崩塌为例,通过两种技术手段相结合,获取崩塌危岩带的高精度点云及三维模型等数据,实现结构特征解译、危岩分布识别、危岩带规模量测,为后续稳定性分析及风险评价提供基础。
1 研究区概况
独家寨崩塌地质灾害位于贵州省六盘水市水城区鸡场镇旗帜村独家寨组,见图1(a)、(b)。研究区属亚热带高原季风气候区,年均降水量1137.0 mm,最大1日降水量达103.6 mm(2014年9月18日),最大3日降水量为201.2 mm(2014年9月17—19日)。区内河流属珠江水系北盘江流域,灾害点位于北盘江右岸河谷切割形成的高陡斜坡地带,距北盘江直线距离约1 km。研究区整体位于滇东高原向黔中丘原的过渡地带,地形切割较深,相对高差多在300~700 m,河谷深邃、“V”型谷发育,为溶蚀—侵蚀沟谷地貌。研究区大地构造总体处于扬子陆块上扬子地块威宁隆起区内的发耳穹盆区,以北盘江河谷多级阶地及不同标高上的3~4层溶洞为标志,反映了区域地壳的间歇性抬升。灾害点附近发育地层主要有三叠系中下统嘉陵江组(T1−2j)灰岩、泥灰岩和下统飞仙关组(T1f)粉砂岩组成,地层产状315°∠18°,地震烈度Ⅵ度。
独家寨崩塌所处的斜坡总体北西高、南东低,见图1(c),危岩带分布高程为1 357~1 481 m,坡高124 m,坡长97 m,坡宽214 m,坡向143°,危岩带上陡下缓,上部坡度达到85°,下部居民区坡度约12°,见图1(c)、图2(a)、图2(d)。直接威胁下方32户110人的生命财产安全,见图1(d),威胁财产2 000万元。

图1 研究区总体位置及地质环境Fig.1 Location and geological environment of the study area
根据现场调查,危岩带下方存在分散分布的崩塌堆积体,整体分布规模约2 250 m3,堆积单体最大2.5 m×2.0 m×1.5 m,一般约1.2 m×1.0 m×0.5 m。据村民介绍,规模较大的历史崩塌堆积体,崩落于20世纪五六十年前,当时该地村民房屋较少,未造成严重危害。此后随着人口增长及村民收入水平提高,独家寨附近房屋逐渐增多,部分崩塌堆积体被处理打碎作为村民建房使用,部分堆积体作为房屋建房的地基,见图2(b)—图2(c)。
在野外调查期间,受强降雨影响,危岩带表面发生零星崩塌落石现象,落石规模约0.6 m3,共约8块单体,最大单体体积约0.8 m×0.5 m×0.4 m。该崩塌落石是高陡斜坡坡面上岩体受节理裂隙切割,在长期风化作用和强降雨影响下,由一整块危岩体呈倾倒式破坏下落并崩解扩散形成,见图2(f),在斜坡坡面上留下清晰的运动痕迹,见图2(e)。

图2 独家寨崩塌变形破坏特征Fig.2 Characteristics of deformation and failure of Dujiazhai collapse
2 技术方法
为实现崩塌体三维数据的全面精确获取,满足对崩塌体节理、裂缝等关键结构面的精确识别,首先采用地面三维激光扫描与无人机载LiDAR相结合的方式进行数据采集,然后对三维激光扫描数据和机载LiDAR数据进行原始点云去噪、拼接、融合、着色、漏洞修复和植被剔除等处理步骤,最后得到研究区三维数据。在此基础上开展岩体结构分析,危岩体识别及体积估算等工作。其中,地面三维激光扫描主要用于获取高陡危岩体临空面一侧的结构面信息,而机载LiDAR则用于获取高位崩塌体顶部结构面信息和周边几何形态信息。工作流程如图3所示。
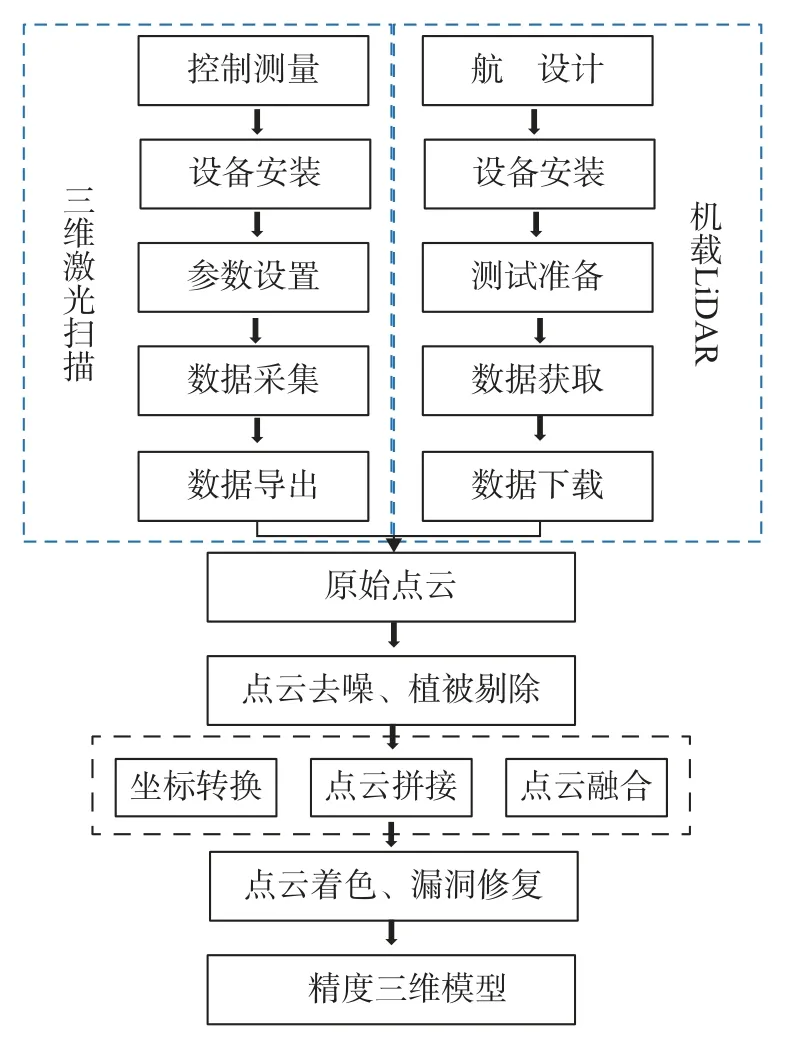
图3 技术流程图Fig.3 Technical flow chart
研究所用的主要设备有:控制测量采用中海达V90 GPS接收机,RTK动态精度达到水平8 mm±1×106mm,垂直精度达到15 mm±1×106mm。三维激光扫描采用RIEGL VZ-2000i,最大测量距离2 050 m,激光脉冲发射频率50/100/300/550/1 000 kHz,精度8 mm,近红外波长,激光发散度0.3 mrad,扫描速度3~240 lines/s,垂直角度分辨率<0.001 5°,水平角度分辨率<0.000 5°;无人机载LiDAR采用RIEGL·RiCOPTER,最大起飞高度3 000 m,垂直起降(VTOL),最大速度14 m/s,激光发射视场角230°,测量范围3~550 m,测量频率350 000 means/s,测量精度10 mm。
在保证测量对象信息完整的情况下,为减少不同测站数据拼接的误差,本次独家寨崩塌三维激光扫描布设测站2站,经数据去噪、拼接、融合、着色、漏洞修复和植被剔除等预处理步骤后,三维激光点云精度达到1.84 cm。机载LiDAR数据采集覆盖独家寨崩塌体及其周边区域,面积0.99 km2,布置检查点7个,成果精度为4.05 cm。以高精度的三维激光点云为基础,基于3个的高精度RTK控制点,精准校正周边环境机载LiDAR点云数据,得到危岩带机载LiDAR点云实景图,并将两者有效融合,形成覆盖崩塌体(危岩带)及周围区域的高精度完整点云模型,见图4(a),其点云密度达到128个/m2,并生成植被过滤后的三维模型,见图4(b)。
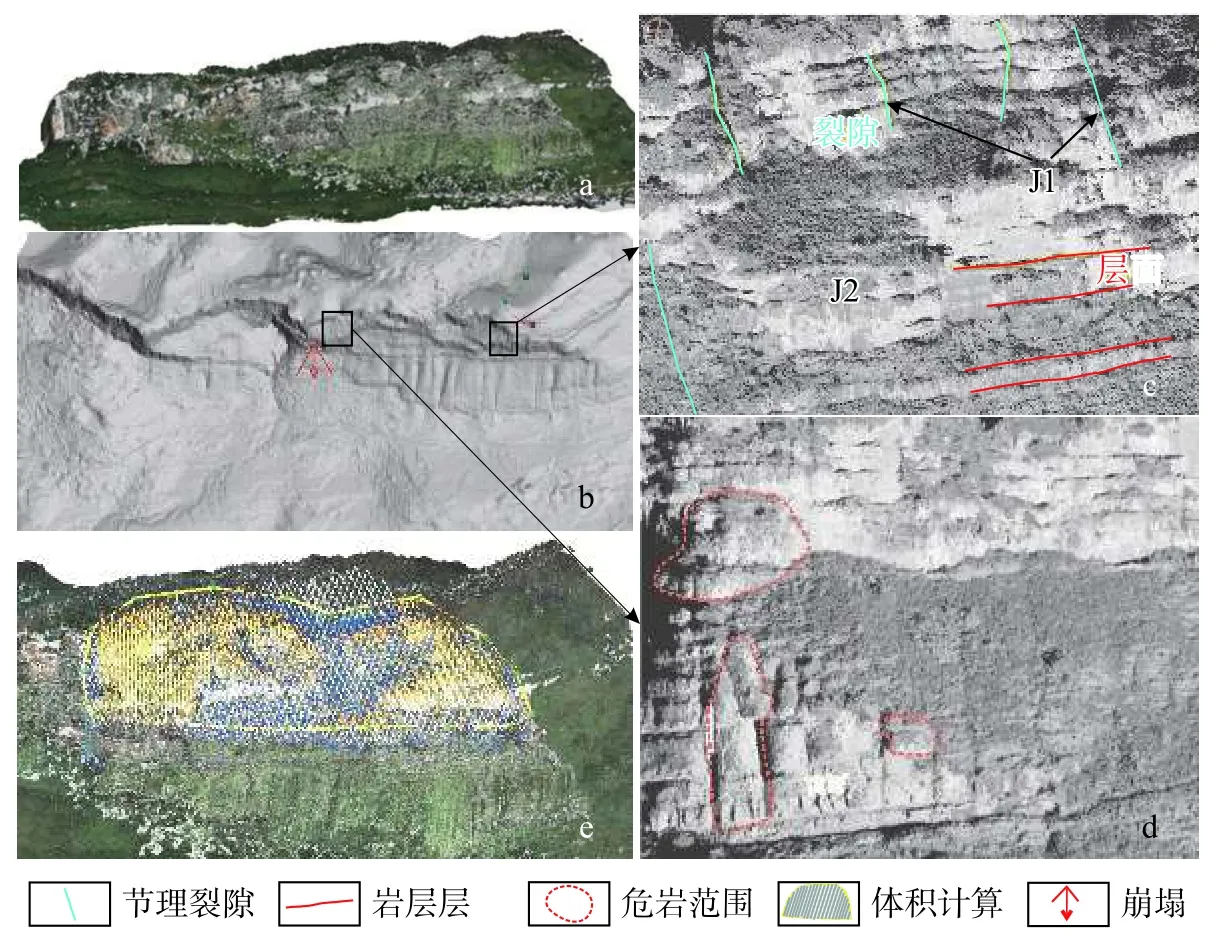
图4 危岩带三维点云融合实景图Fig.4 3D point cloud fusion of the dangerous rock belt
3 成果与讨论
融合无人机载LiDAR与地面三维激光扫描成果,可获取单一技术手段所不能得到的全方位高精度三维数字成果,进而开展岩体结构分析,危岩体识别以及体积估算等工作。
3.1 岩体结构、裂隙提取
基于融合后的高精度三维数据,可全方位观测危岩带的岩体结构特征和裂缝发育特征,俯视与正视观测相结合,实现不同手段的优势互补。特征提取的主要依据为真彩色影像及反射率灰度影像:
(1)基于真彩色影像的裂隙提取
当岩体出露面上发育裂隙时,在真彩色影像中具有明显色调特征,其节理裂隙的迹线破坏了岩体色调的完整性,其迹线易于辨识。
(2)基于反射率灰度影像的裂隙提取
当岩体出露面上发育裂隙时,在反射率灰度影像中具有明显色调特征。当裂隙无填充时,裂隙处反射率较低,灰度偏深;当裂隙被方解石等岩石填充时,裂隙处反射率较高,灰度偏浅。此裂隙迹线易于辨识。
基于俯视观测可发现陡崖顶部后缘位置存在许多拉张裂缝,裂缝宽0.1~0.2 m,走向161°,可见深度约3 m。
基于正视观测可提取岩体结构信息和坡面裂隙位置(表1)。坡体表面受两组节理裂隙切割及风化作用影响,岩体结构呈块裂结构,岩体块度约为1.5 m×1.0 m×0.5 m。斜坡表面存在较多的不稳定块体,见图4(c)。

表1 结构面特征表Table 1 Structural plane characteristics
3.2 危岩体识别
崩塌危岩带通常发育节理裂隙,将原本完整的岩体切割形成若干危岩单体。采用三维激光扫描与机载LiDAR融合获取灾害体三维点云数据,并提取裂隙信息,可快速、准确、高效的识别危岩体的分布特征。
对高陡危岩带,三维激光扫描由于植被遮挡、视线阻隔等原因,往往会造成点云存在“空洞”等数据缺失区域,将机载LiDAR数据与三维激光扫描数据相匹配融合,可很好的弥补由于数据缺失造成对危岩体的漏判、误判。
通过对岩体结构识别、裂隙提取分析,可以根据裂隙发育与结构面的组合关系,识别出危岩带上的潜在危岩体。文中研究基于节理J1与节理J2以及层面的交切组合关系,尤其是节理J2形成的外倾结构面与灰岩、泥灰岩差异风化形成的凹岩腔构成不利组合,有效识别出危岩带表面的潜在危岩体,见图4(d)。
3.3 危岩体体积估算
文中研究危岩体体积估算的方法为:以危岩单体边界的三维属性为基础,分析模拟形成危岩单体下表面,将危岩单体下表面以等间隔d划分成方格网,d远小于任一条边界线的长度,由落在网格内的点云计算的平均竖向落差值,代表该格网的高程,乘以格网的面积,对整个区域累加即为总体积,见图4(e)。
基于本次研究采集的三维数据进行危岩体识别,以岩体节理裂隙等结构为单体边界,划分出危岩带分布范围。根据上述方法及数字表面模型所形成的危岩体上表面与分析模拟所形成的危岩体下表面,开展危岩单体不规则体积计算,危岩带累计危岩体规模约6.6×104m3,为中型崩塌。
3.4 适用性讨论
(1)地面三维激光扫描是崩塌危岩带精细化调查的有效手段之一,但对于植被大量覆盖的灾害点,激光点反映的多为植被表面,无法有效测量真实的地形表面,因此地面三维激光扫描在高植被覆盖区域的有效探测精度会显著降低。
(2)对地形条件复杂、危岩带表面凹凸不平的崩塌地质灾害,地面三维激光扫描设站困难,部分凹腔、裂隙部位存在视线遮挡,造成获取的点云数据存在“空洞”,尽管通过插值算法等技术手段可以部分修补空洞区域,但修补的点云数据无法真实反映危岩带本身的裂隙特征,且修补的范围往往较小。
(3)以上情形,单一采用三维激光扫描显然达不到理想的调查效果,结合采用机载LiDAR技术,凭借俯视角度及可“穿透”植被的优势,可有效的弥补单一采用三维激光扫描的局限性。但机载LiDAR并非能完全替代三维激光扫描,在测危岩带立面细节信息时,三维激光扫描具有比机载LiDAR更好的观测角度和测量精度。
(4)将两种技术相融合,可实现优势互补,弥补单一手段的不足,解决高位、隐蔽性、复杂崩塌地质灾害的识别量测问题。当然,采用两种技术手段势必会推高费用成本和增加技术难度,对部分不甚复杂的崩塌灾害点,在能有效获取高精度数字表面模型的条件下,也可因地制宜的选取合适的单一技术手段。
4 结论
此次研究采用无人机载LiDAR与地面三维激光扫描相融合的技术方法,以贵州省水城区鸡场镇独家寨崩塌为研究对象,通过两种技术方法进行野外扫描、数据处理、数据融合等步骤,形成高精度三维点云及DEM数据,可为地质灾害风险调查提供较为全面精确的数据基础,具有单一手段无法实现的技术优势。此次研究主要得出如下结论:
(1)机载LiDAR从上向下扫描获取点云数据,对立面信息获取不足,而三维激光扫描从危岩带斜下方或正前方扫描获取数据,可以有效量测危岩带坡面岩体结构以及危岩特征信息。三维激光扫描易受植被遮挡及视线阻隔,造成数据存在空洞,而机载LiDAR则具有在一定程度上“穿透”植被的能力,可以获取高分辨率的数字高程模型(DEM)。在崩塌地质灾害调查中,将两种技术融合使用,可有效弥补单一方法的不足,获取崩塌危岩带的高精度点云数据。
(2)机载LiDAR技术与三维激光扫描技术融合使用的技术流程为野外数据采集-原始点云预处理-不同数据融合-整体着色修复等步骤,最后得到高精度三维模型数据。基于该模型数据,可以对岩体结构和裂隙进行提取,进而有效识别危岩体的空间分布,并确定危岩带的规模等信息。
(3)将两者相融合的技术方法,适用于植被覆盖率高、存在视线遮挡、顶部存在张拉裂缝等情况下崩塌地质灾害的精细化调查。该方法在岩体结构分析及裂隙特征提取基础上,还可以进一步分析危岩体的稳定性、运动轨迹、危害范围,结合承灾体特征,开展易发性评价、危险性评价、易损性评价和风险评价等工作。
