轮毂电机式三轴纯电动铰接客车扭矩优化分配控制策略研究
2022-08-30邵长江杨坤王杰谭迪付宏勋刘国栋
邵长江,杨坤*,,2,王杰,谭迪,付宏勋,刘国栋
(1. 山东理工大学 交通与车辆工程学院,山东淄博 255000; 2. 山东意威汽车科技有限公司,山东淄博 255000; 3. 潍柴动力股份有限公司,山东潍坊261000)
三轴纯电动铰接客车具有空间大、载客量多的优点,它可为解决空气污染和城市交通拥堵等问题提供有效途径[1]。随着人们对城市公交性能要求的逐渐提高和对电动汽车技术研究的逐步深入,客车行业对整车轻量化、续驶里程以及低地板设计等要求日益提高,为此,分布式驱动电动客车已成为未来客车的发展趋势之一[2]。市区行驶工况下,纯电动客车大多数时间速度较低,功率需求较小,单电机集中式驱动不仅增加了动力系统布置难度[3-4],而且由于轻载运行时电机效率低,会使整车能耗增加;而基于轮毂电机的分布式驱动构型,可通过制定合理的控制策略,根据整车工况动态分配电机功率,优化整车整体工作效率[5-6]。
多电机扭矩分配是分布式驱动电动汽车的核心问题,近年来,学者们对其开展了深入研究,例如:Chen等提出了一种应用于四轮毂电机扭矩分配的快速全局优化算法,并对其节能效果进行了验证,但存在整车模型精度要求高、计算量大的问题[7]。Yang等基于粒子群优化算法和电机效率MAP图,以电机外特性和电池功率为约束,实现了四轮驱动转矩的瞬时优化分配[8]。徐兴等利用轮毂电机台架实验得到的效率特性,建立了侧重提高电机功率和响应速度的双目标函数,并基于模糊控制理论设计权重函数进行协调,得到四轮毂电机轴间转矩分配系数,但该方法依赖模糊规则,影响控制效果的因素较多[9]。李胜琴等对四驱型电动汽车进行参数匹配,基于双电机能量利用率数学模型设计了前后驱动转矩分配策略,但未考虑制动时的转矩分配问题[10]。目前针对分布式驱动扭矩分配的研究,主要集中在四轮毂驱动型电动乘用车,通过建立目标函数并基于优化算法实现提高整车能量利用率的目标。但针对三轴铰接式分布驱动型纯电动客车的相应研究不多,且部分优化算法,如全局优化、瞬时在线优化等算法存在求解复杂,运行时间长等问题。
本文以三轴纯电动铰接客车为研究对象,提出了一种六轮毂电机分布式驱动构型,并完成整车关键总成的参数匹配;针对前、中、后轴电机扭矩分配问题,建立以系统效率最佳为目标的扭矩优化分配数学模型,利用二次规划算法对整车扭矩分配系数进行离线优化,并基于MATLAB/Simulink搭建扭矩优化分配策略模型。最后,针对传统单电机集中式驱动构型传动效率低、低负载工况下能耗高等问题,基于AVL Cruise与MATLAB/Simulink联合仿真平台搭建六轮毂电机分布式驱动型纯电动客车模型,通过与驱动功率相同的单电机集中式驱动构型进行比较,对整车动力性、经济性和控制策略的合理性进行验证。
1 整车构型
轮毂电机式分布式驱动型电动客车是将驱动电机安装在车轮内,可省去繁杂的机械传动部件,简化汽车底盘的布置,各车轮可独立控制,动态调整电机的功率分布[11]。为此,本文提出了一种基于六轮毂电机分布式驱动的纯电动铰接客车构型,主要由轮毂电机和驱动控制器、动力电池、电池管理系统(Battery management system,BMS)、整车控制器(Vehicle control unit,VCU)等组成[12],如图1所示。动力电池、轮毂电机及控制器、高压配电箱、DC/AC逆变器及空调等辅助设备通过高压线束连接;蓄电池与车载低压设备等通过低压线束连接;电机控制器、BMS与VCU之间通过CAN总线实现数据交互。整车以动力电池为能量源,经过DC/AC逆变器将动力电池的直流电转化为交流电,给驱动电机供电,VCU根据驾驶员的扭矩请求,在多个电机之间进行扭矩分配,驱动车辆的行驶。该构型具备以下优势:可优化底盘结构,有利于提高整车空间利用率和轻量化水平;整车传动链短,驱动效率高,轴荷分配更合理;没有贯通轴的轮毂电机不仅降低了公交客车低地板化的设计难度,而且能够实现合理的扭矩分配策略,可有效提高各电机的综合效率,进而提高整车经济性[13]。
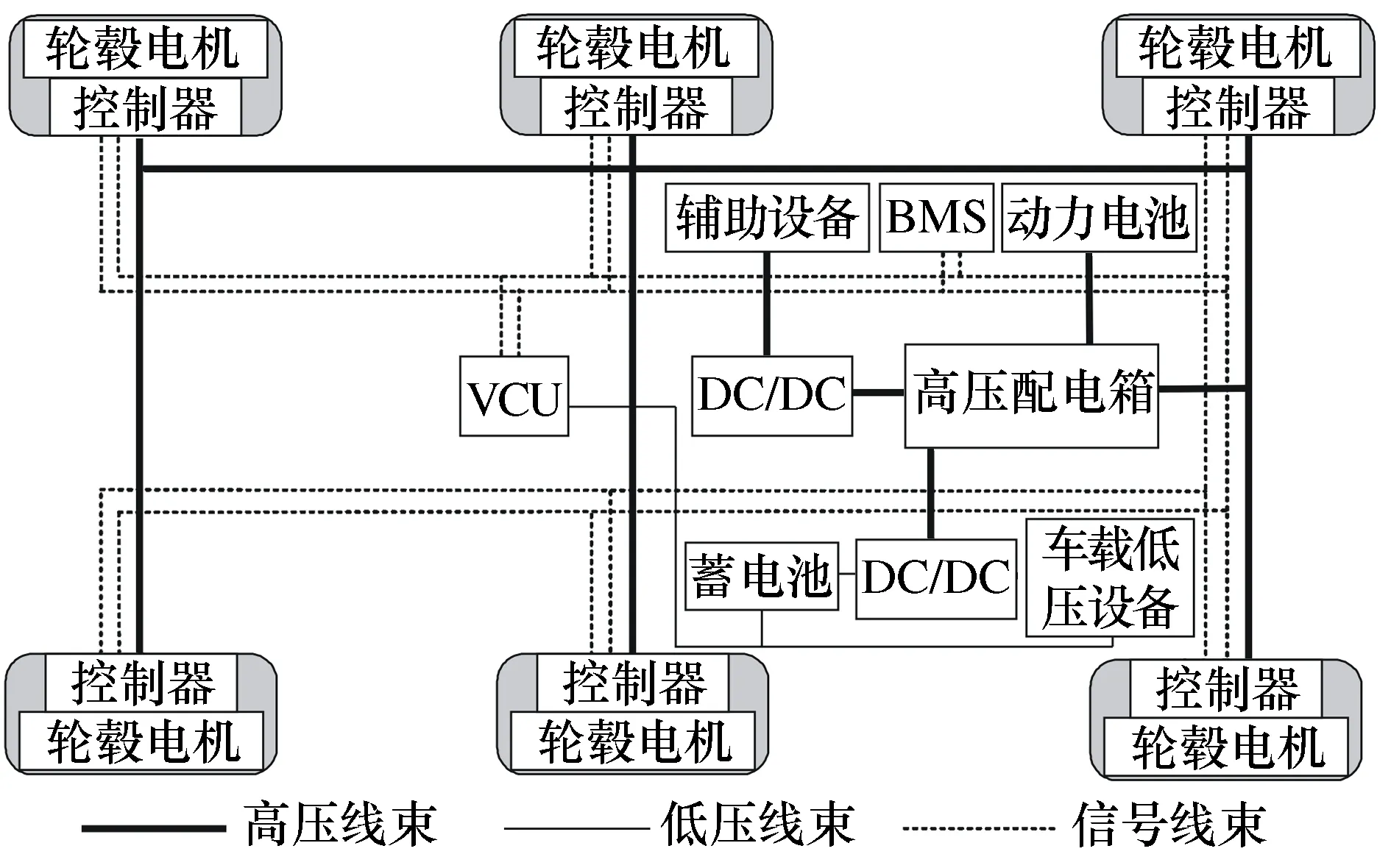
图1 整车构型图
2 整车关键总成匹配
三轴铰接式纯电动客车的基本参数和性能指标如表1所示。
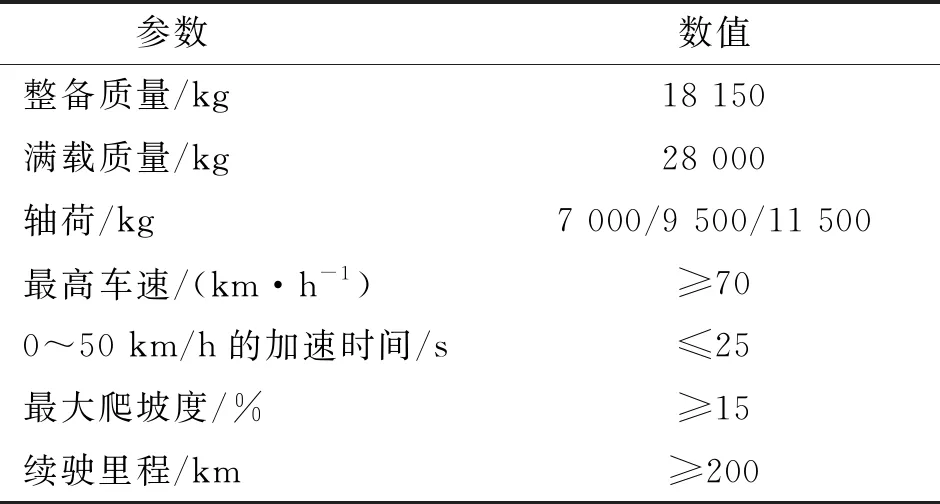
表1 整车基本参数和性能指标
2.1 轮毂电机参数匹配
2.1.1 电机转速
电机的最高转速由整车最高车速确定,即
(1)
式中:nmax为电机最高转速,r/min;umax为整车最高车速,km/h;i0为减速器速比;r为车轮半径,m。
电机的额定转速为
(2)
式中:n0为电机额定转速,r/min;β为恒功率扩大系数。
2.1.2 驱动电机总需求功率
三轴铰接式纯电动客车的动力源为前、中、后轴6个轮毂电机,驱动电机的功率之和应满足整车在不同工况下的功率需求。一般由30 min最高车速确定电机额定功率PN,电机最大功率Pmax应同时满足整车最高车速、最大爬坡和0~50 km/h加速时间的功率需求[14]。

(3)
(4)
(5)
Pmax=max(Pm1,Pm2,Pm3)
(6)
式中:Pm1、Pm2、Pm3分别为整车最高速度、最大爬坡和0~50 km/h的加速时间所需的电机功率,kW;Pmax为电机最大功率,kW;ηt为电机效率;m为整车质量,kg;f为滚动阻力系数;CD为风阻系数;A为迎风面积,m2;imax为最大爬坡度,%;up为爬坡车速,km/h;δ为旋转质量换算系数;t为0~50 km/h的加速时间,s;ua为加速终了的速度,km/h。
2.1.3 驱动电机总需求扭矩
由整车满载爬坡工况确定电机最大需求扭矩,即

(7)
式中Tmax为电机最大需求扭矩,Nm。
电机额定扭矩为
(8)
式中PN为电机额定功率,kW。
由上述计算,可得到驱动电机总需求功率和扭矩的匹配结果,如表2所示。
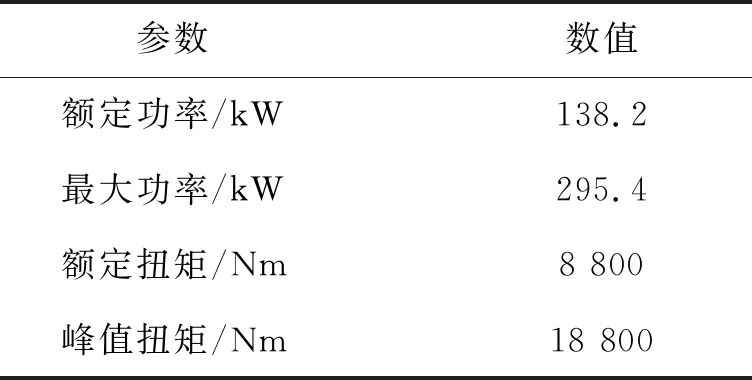
表2 驱动电机参数
传统电动汽车的动力源匹配根据整车动力性指标确定单电机基本参数,对于六轮毂电机分布式驱动构型,在求出动力源总的需求功率和扭矩后,还存在确定各轮毂电机具体参数的问题。本文根据三轴铰接式纯电动客车载荷分布,以充分发挥车轮附着能力为原则,得到前轴、中轴和后轴的轮毂电机基本参数,如表3所示。
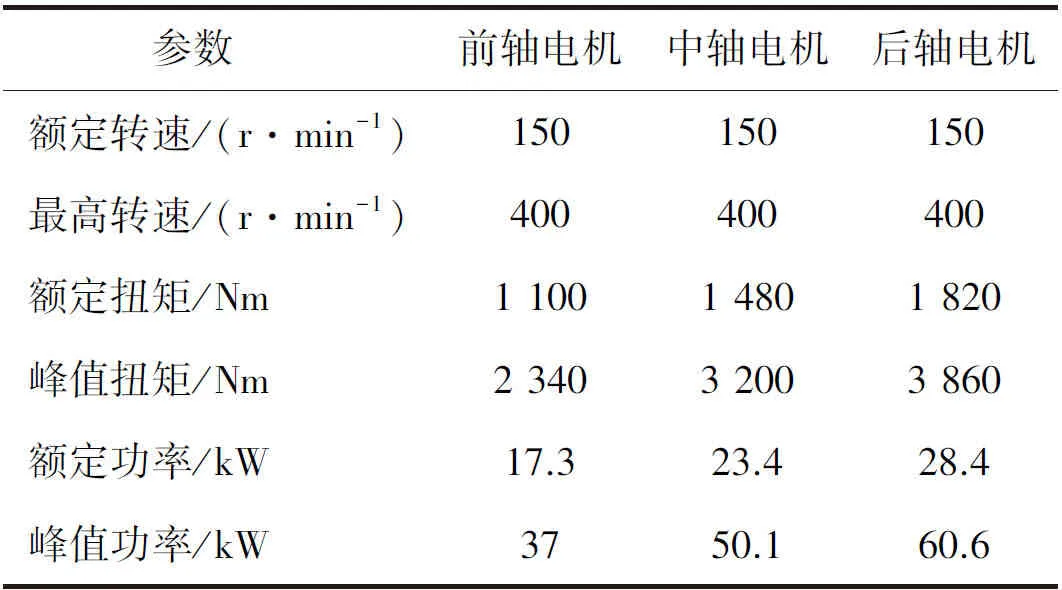
表3 轮毂电机基本参数
2.2 动力电池组参数匹配
纯电动客车要求动力电池有较高的能量密度、功率密度和安全性能[15],本文选择的动力电池类型为磷酸铁锂电池,相应的单体性能参数如表4所示。
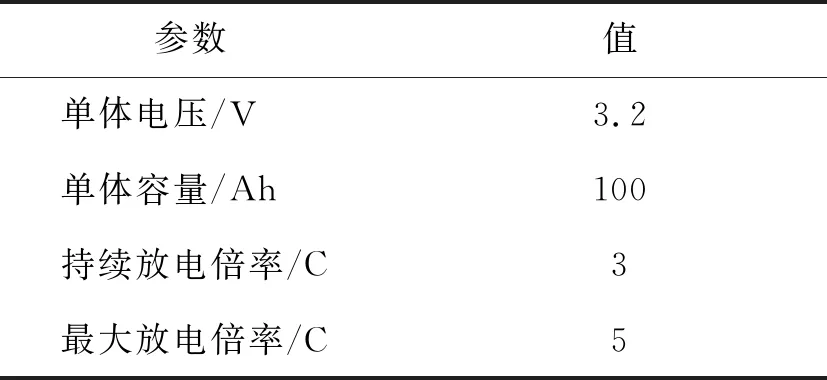
表4 电池单体性能参数
动力电池组的容量应满足电池最大放电功率要求,即

(9)
式中:Pbmax为单体的最大放电功率,kW;Cb为电池单体标称容量,Ah;ηm为电机及其控制器的效率;Pλ为附件设备消耗的功率,kW。
同时还应满足整车续驶里程的要求,即

(10)
式中:u为车速,km/h;d为续驶里程,km;DOD为动力电池组放电深度;ηE为动力电池组放电效率;ηα为客车附件设备的能量消耗比率;U为动力电池组电压,V。
因此,动力电池组的容量CE为
CE=max(Cp,Cd)
(11)
由上述计算,可得动力电池组基本参数如表5所示。
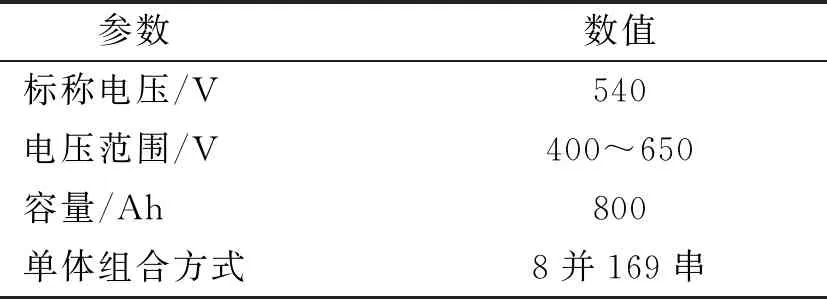
表5 动力电池组基本参数
3 扭矩优化分配
三轴铰接式纯电动客车的扭矩优化分配策略是根据整车当前车速和需求扭矩,选择最佳的驱动模式,即单轴驱动、双轴驱动、三轴驱动,以实现整车扭矩动态分配,优化电机综合工作区间,设计原则如下:
1) 能根据整车状态信息,如车速、加速度、电池SOC等,正确识别驾驶员请求,协调控制轮毂电机间的扭矩分配,提高电机综合工作效率。
2) 在允许的制动强度、电池SOC 使用范围和电池充电倍率等综合条件下,尽可能多的回收制动能量,以降低整车能耗,延长续驶里程。
3) 控制策略能适应整车工况变化,控制车辆运行在不同的工作模式。
3.1 扭矩优化分配数学模型
针对六轮毂分布式驱动构型,以驱动系统总效率最大值为目标函数,以各轴的扭矩分配系数为变量,建立扭矩优化分配数学模型,并通过二次规划算法进行离线优化,确定整车前、中、后轴的扭矩分配系数,以此作为整车扭矩优化分配策略的在线查表数据,减小控制的复杂程度,并提高实时计算的速度。
定义前轴、中轴和后轴的电机扭矩分配系数分别为kf、km和kr,计算公式为:
(12)
(13)
(14)
式中:Tf为前轴电机扭矩,Nm;Tm为中轴电机扭矩,Nm;Tr为后轴电机扭矩,Nm。
驱动电机效率与转速和扭矩有关,但由于效率损失涉及因素诸多,无法精确表达,通常根据电机实验数据得到的效率MAP进行插值[16]。以前轴轮毂电机为例,其电机效率MAP如图2所示,从而得到转速为n,扭矩为T时的电机效率函数ηf(n,Tf)。同理可得中轴、后轴轮毂电机的效率函数ηm(n,Tm) 和ηr(n,Tr)。
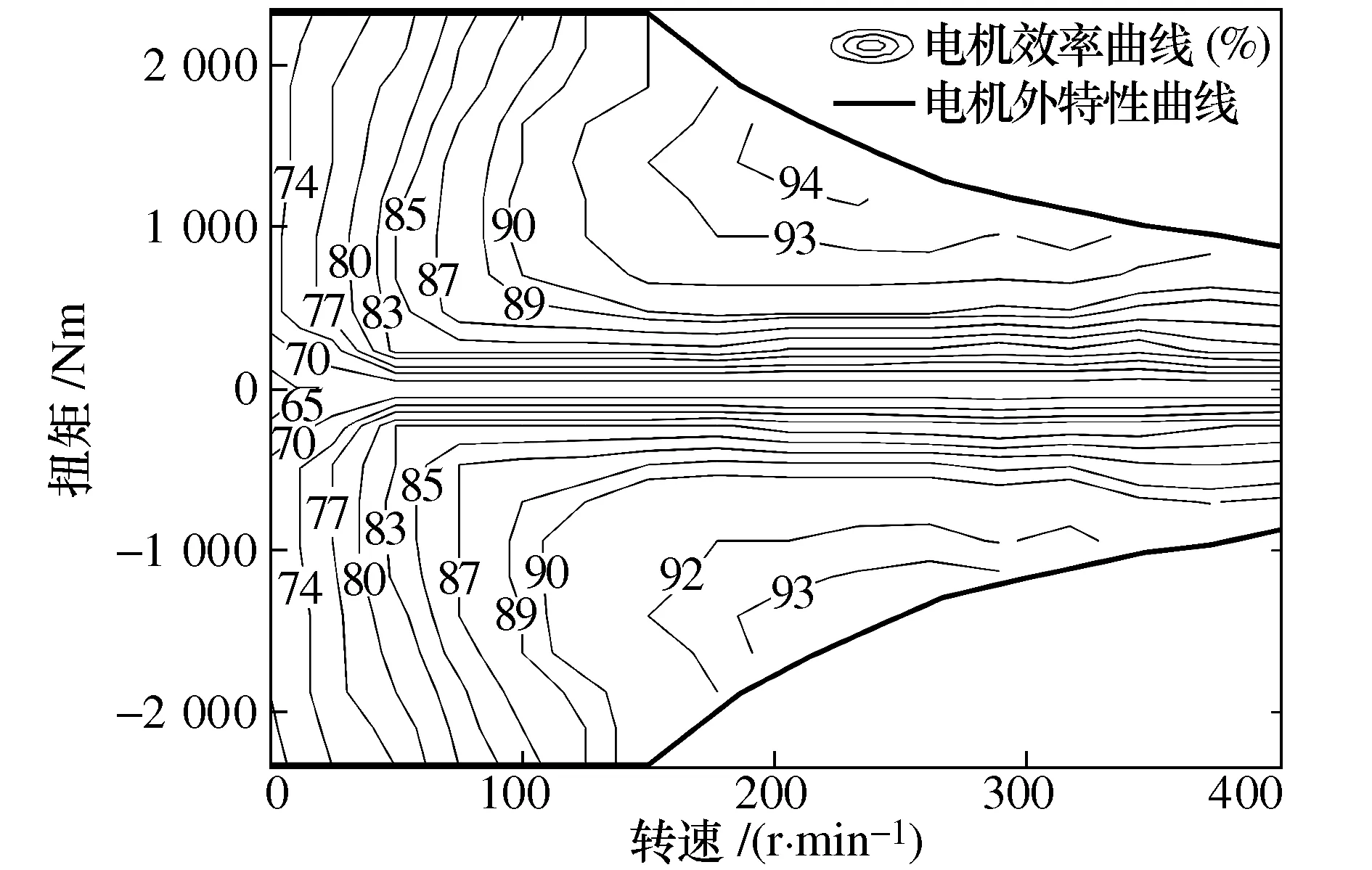
图2 前轴轮毂电机效率MAP图
综上可得,整车驱动系统在驱动模式下的总效率为
(15)
式中:Treq为整车需求扭矩,Nm;n为电机转速,r/min;ηf(n,Tf)为前轴轮毂电机效率函数。
同理可得,整车驱动系统在制动模式下的总效率为

(16)
以上目标函数的约束条件为:
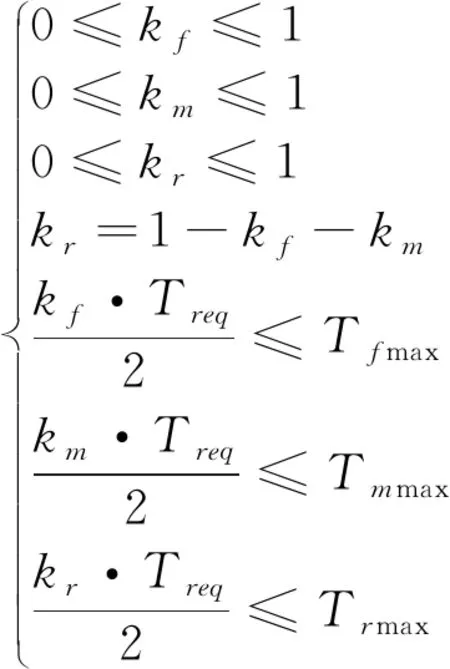
(17)
式中:Tfmax、Tmmax、Trmax分别为当前转速下前轴、中轴、后轴轮毂电机的外特性扭矩,Nm。
利用序列二次规划算法求解式(15)~式(17),可得到在不同电机转速和扭矩需求条件下,使驱动系统总效率达到最优时的前、中轴扭矩优化分配系数kf和km,如图3和图4所示。
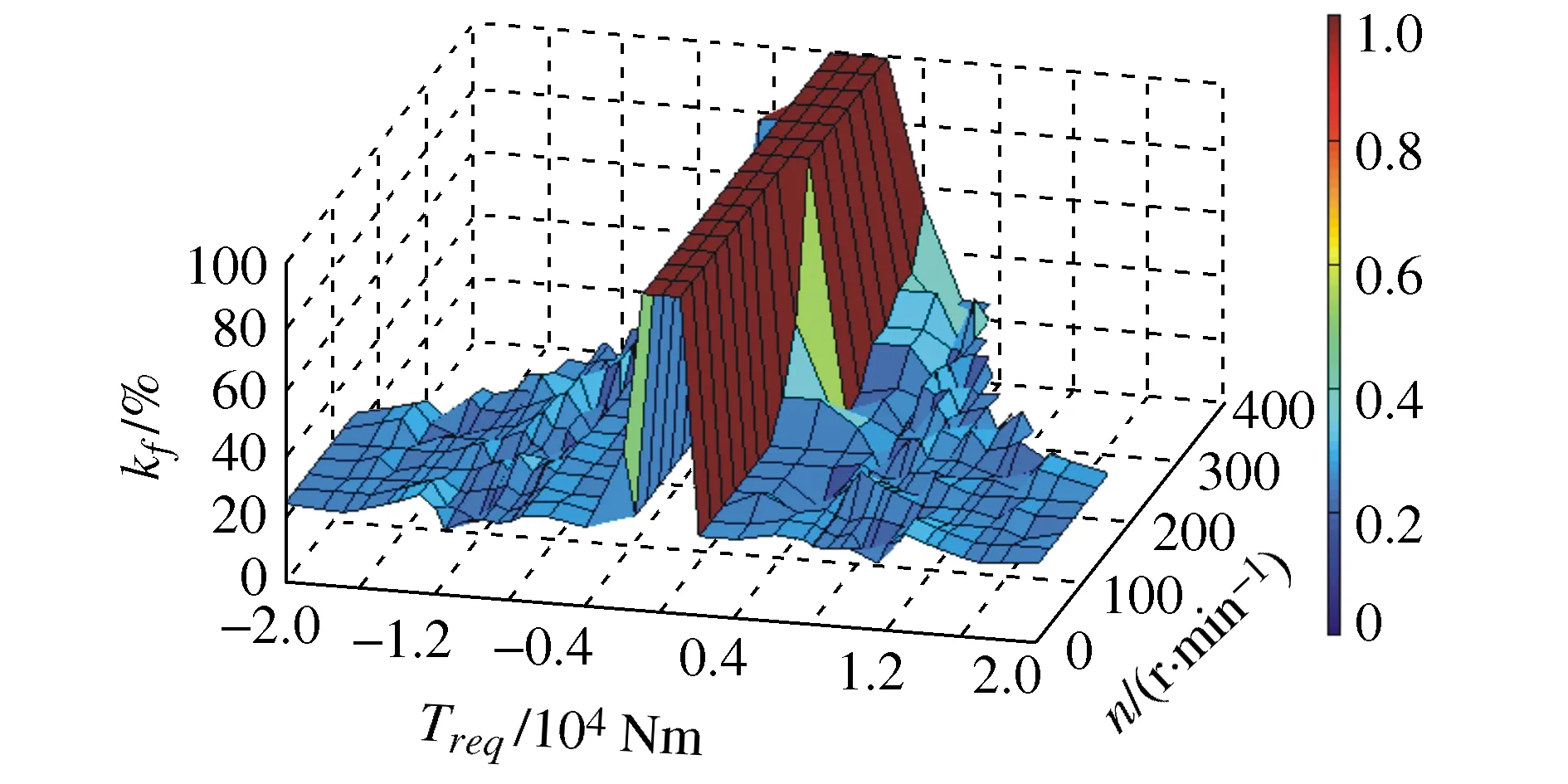
图3 前轴电机扭矩优化分配
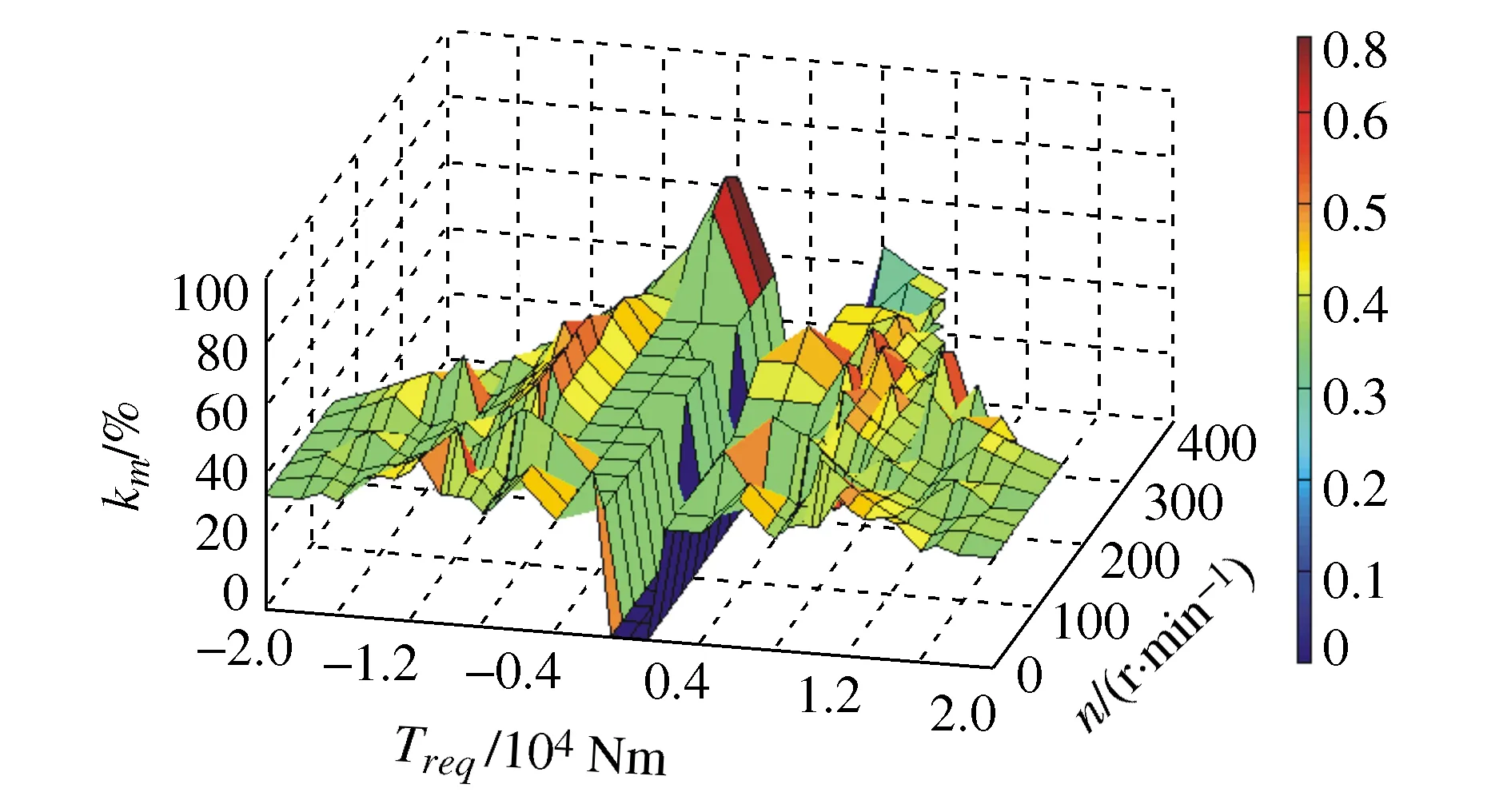
图4 中轴电机扭矩优化分配系数
由图3和图4可知,在不同电机转速和扭矩需求条件下,使系统总效率最佳时的轴间扭矩分配系数不同。例如,当整车扭矩需求较小时,前轴扭矩分配系数为1,因此中轴和后轴的扭矩分配系数均为0,即采用前轴两个轮毂电机驱动可以获得较高的电机负荷,以提高驱动系统的总效率。若整车在不同转速下的扭矩需求较大,所有轮毂电机均参与工作,基于驱动系统总效率最佳的原则,将整车动态需求扭矩分别以比例系数kf、km和1-kf-km分配到前、中、后轴轮毂电机。
3.2 扭矩优化分配策略
本文基于六轮毂电机分布式驱动构型特点和整车控制策略的设计原则,制定了如图5所示的三轴铰接式纯电动客车扭矩优化分配策略。
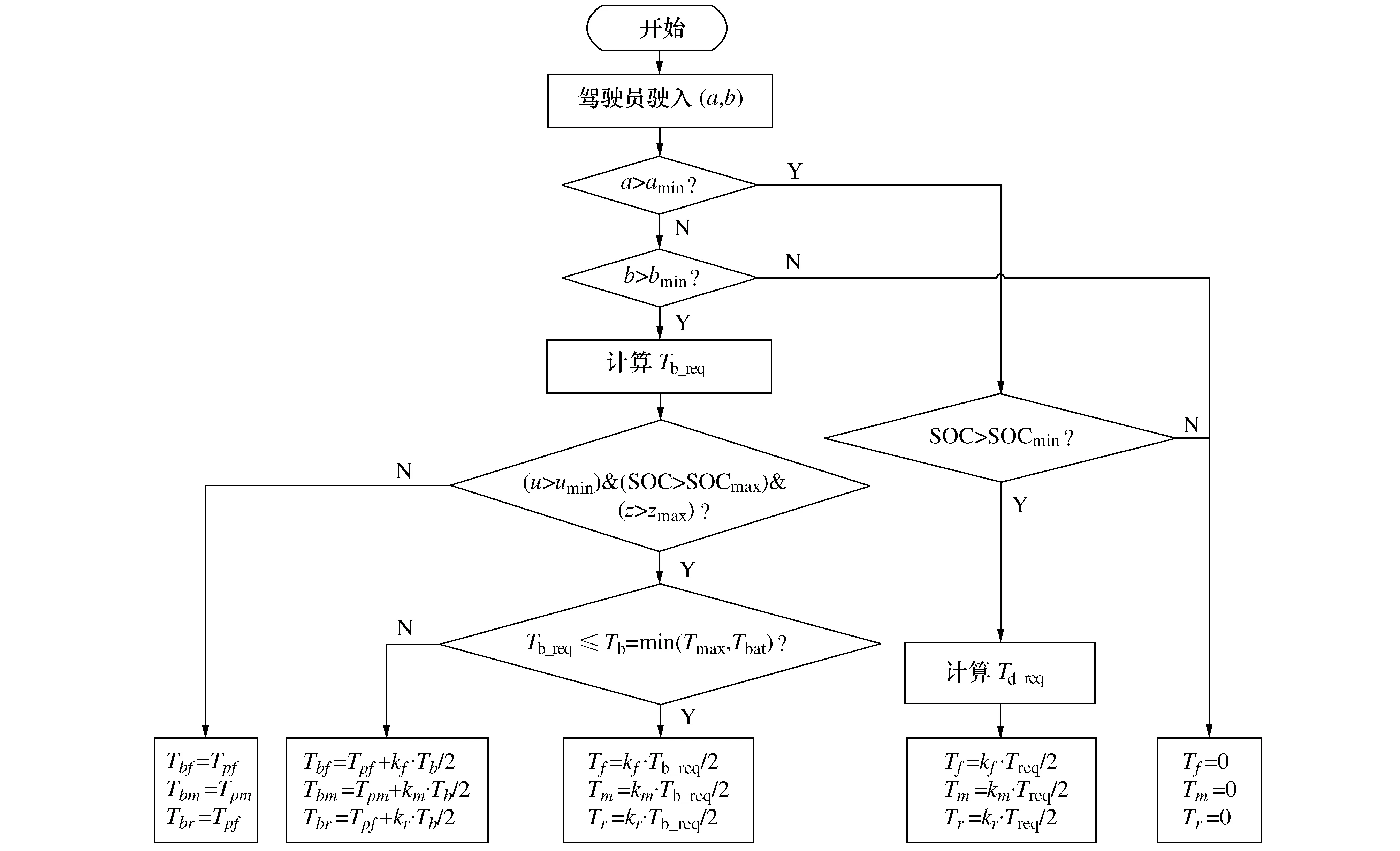
图5 整车扭矩优化分配策略流程图
图5中:a为加速踏板开度,%;b为制动踏板开度;amin和bmin分别为判断整车进入驱动模式和制动模式的踏板门限;u为当前车速;umin和zmax分别为判断制动能量回收的车速门限和制动强度门限;SOCmin和SOCmax分别为允许车辆驱动的SOC门限和判断制动能量回收的SOC门限;Tb-req为整车制动需求扭矩;Tbat为电池最大充电功率允许的电机制动扭矩;Tbf、Tbm、Tbr分别实际前、中、后轴制动扭矩;Tpf、Tpm、Tpr分别为前、中、后轴机械制动扭矩;Td-req为整车驱动需求扭矩。系统首先实时采集整车数据,例如车速、加速或制动踏板开度和电池SOC值等信息。当判定驾驶员踩下加速踏板后,控制系统进入驱动模式,根据驾驶员请求扭矩进行轴间扭矩优化分配。如果判定驾驶员踩下制动踏板则进入到制动模式,超过紧急制动上限值时,为了保证制动效能和快速响应,优先采用机械制动;另外,车速较低或电池电量达到上限时,不适合电机制动能量回收,采用机械制动;当车速超过最低限值、电池SOC值未超过上限,且处于中低制动强度时,仅由电机参与制动,根据驾驶员制动踏板开度所请求的制动扭矩进行轴间扭矩优化分配,提升制动能量回收率。如果再生制动扭矩控制不足,控制机械制动工作,进行联合制动。
为验证分析整车控制器通过解析驾驶员加速踏板和制动踏板开度的变化,计算驾驶员对整车的期望扭矩[17],驱动电机扭矩负荷系数和加速踏板开度的函数关系可表示为
L=f(a)
(18)
式中L为驱动电机扭矩负荷系数。
综合线性加速踏板特性曲线和驱动电机的扭矩外特性[18],整车的纵向需求扭矩可表示为:
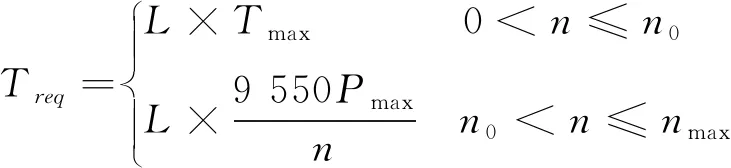
(19)
由式(18)和式(19)标定驾驶员在不同电机转速下通过加速踏板所请求的扭矩值,如图6所示。
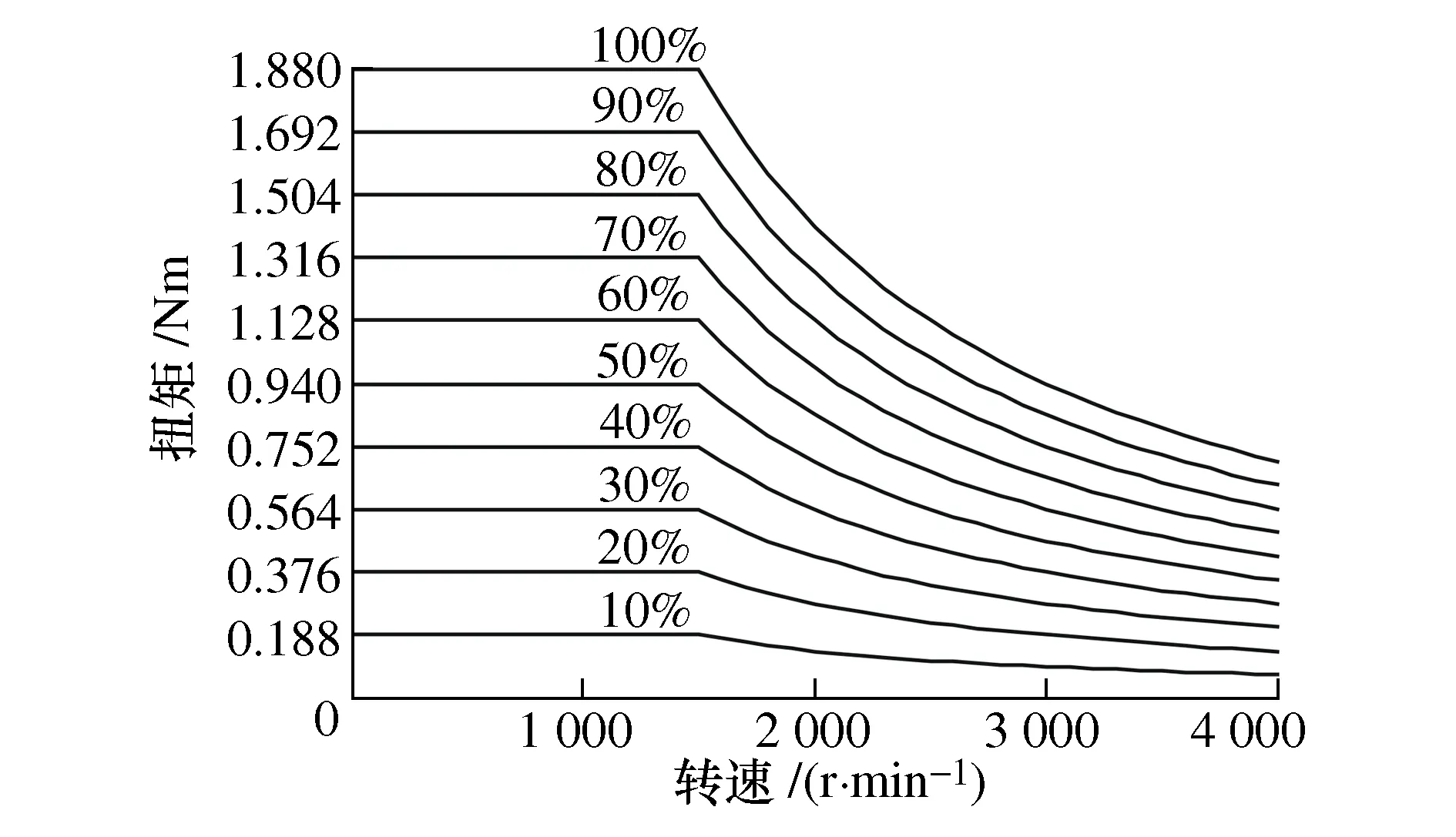
图6 驾驶员加速踏板请求扭矩
4 验证分析
4.1 整车模型搭建
在完成整车关键总成匹配和扭矩优化分配控制策略开发之后,应对整车性能和控制策略的合理性进行验证。本研究基于AVL Cruise建立了如图7所示的六轮毂电机驱动型纯电动客车仿真模型,包括车辆模块、动力电池模块、电机模块和制动器模块等[19],根据图5的整车扭矩优化分配策略流程,基于MATLAB/Simulink搭建扭矩优化分配模型,并编译为 DLL文件,通过 MATLAB DLL接口实现Simulink和AVL Cruise联合仿真。
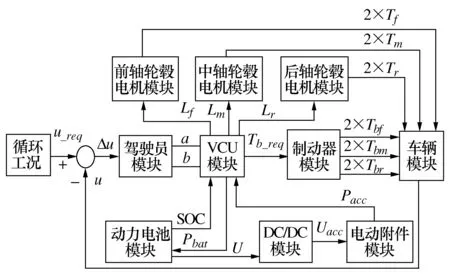
图7 六轮毂电机驱动型纯电动客车仿真模型原理图
图7中:u-req为目标车速;u为实际车速;Δu为目标车速和实际车速的差值;Lf、Lm、Lr分别为前轴、中轴、后轴轮毂电机负荷率;Pbat为动力电池组功率;U为动力电池组电压;Uacc为电动附件设备电压;Pacc为电动附件设备消耗的功率。
为了与单电机集中式驱动构型对比,以验证两种构型方案的整车性能差异,本研究同时搭建了单电机集中式纯电动客车仿真模型,如图8所示,其驱动系统参数见表6。
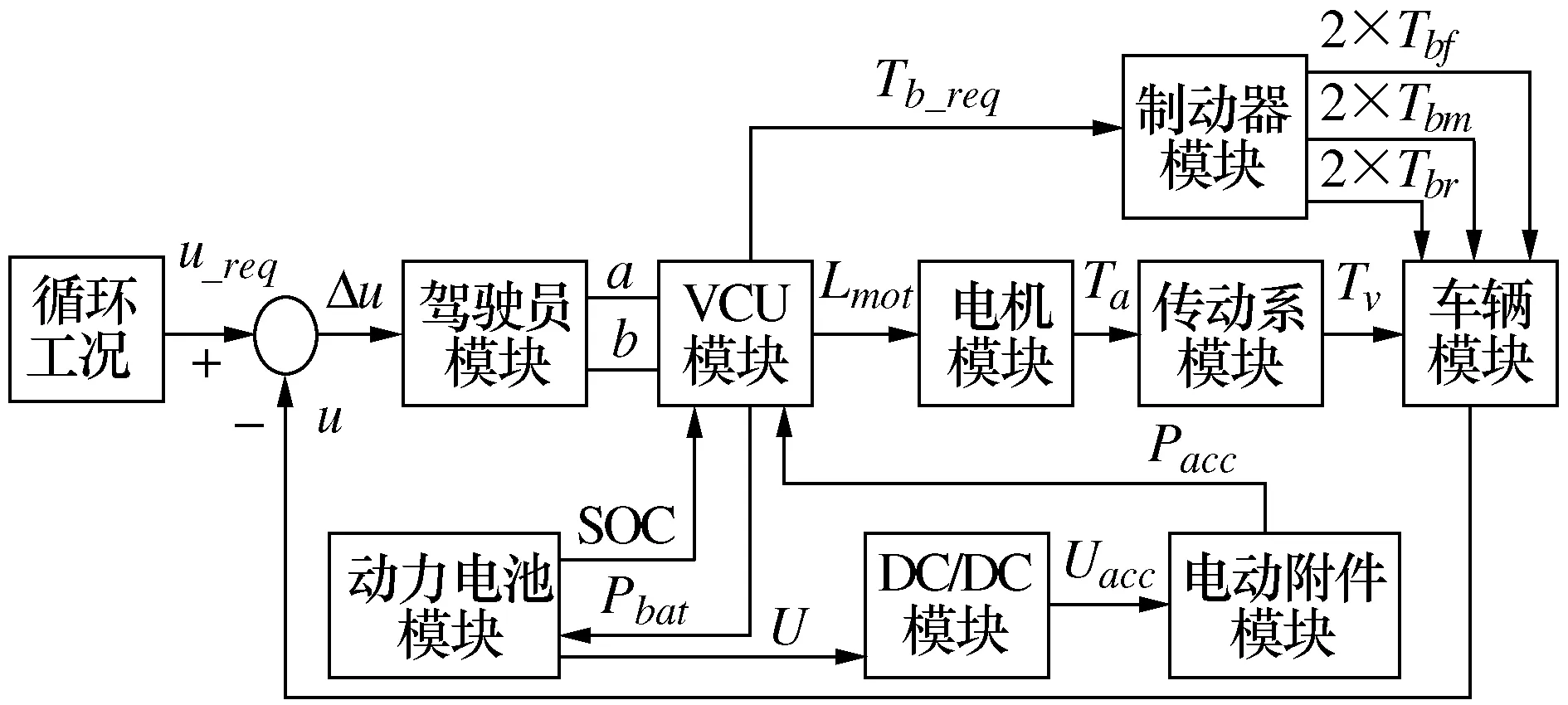
图8 单电机集中式纯电动客车仿真模型原理图
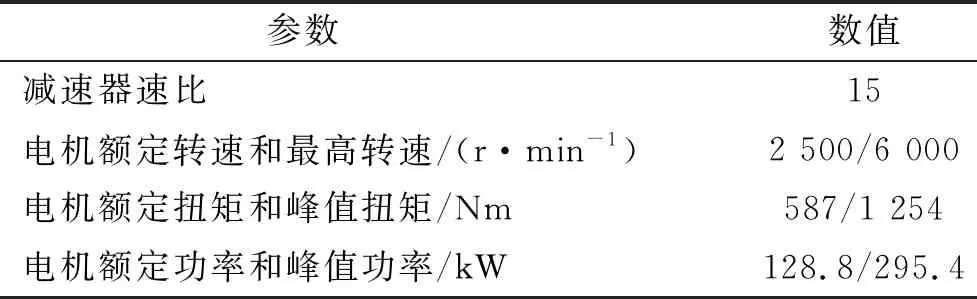
表6 单电机集中式驱动系统参数
图8中:Lm为电机负荷率;Ta为电机扭矩;Tv为传动系统输出扭矩,其余符号见上文。
4.2 动力性验证与对比
基于所搭建的两种整车模型,分别在满载工况下对其最高车速、0~50 km/h加速时间和最大爬坡度进行验证,结果如图9和图10所示。
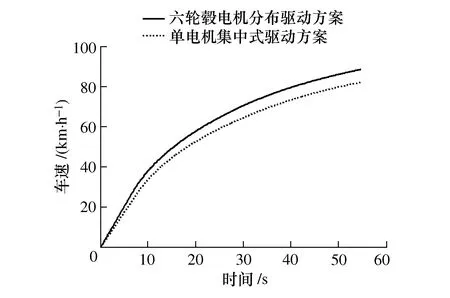
图9 最高车速对比图
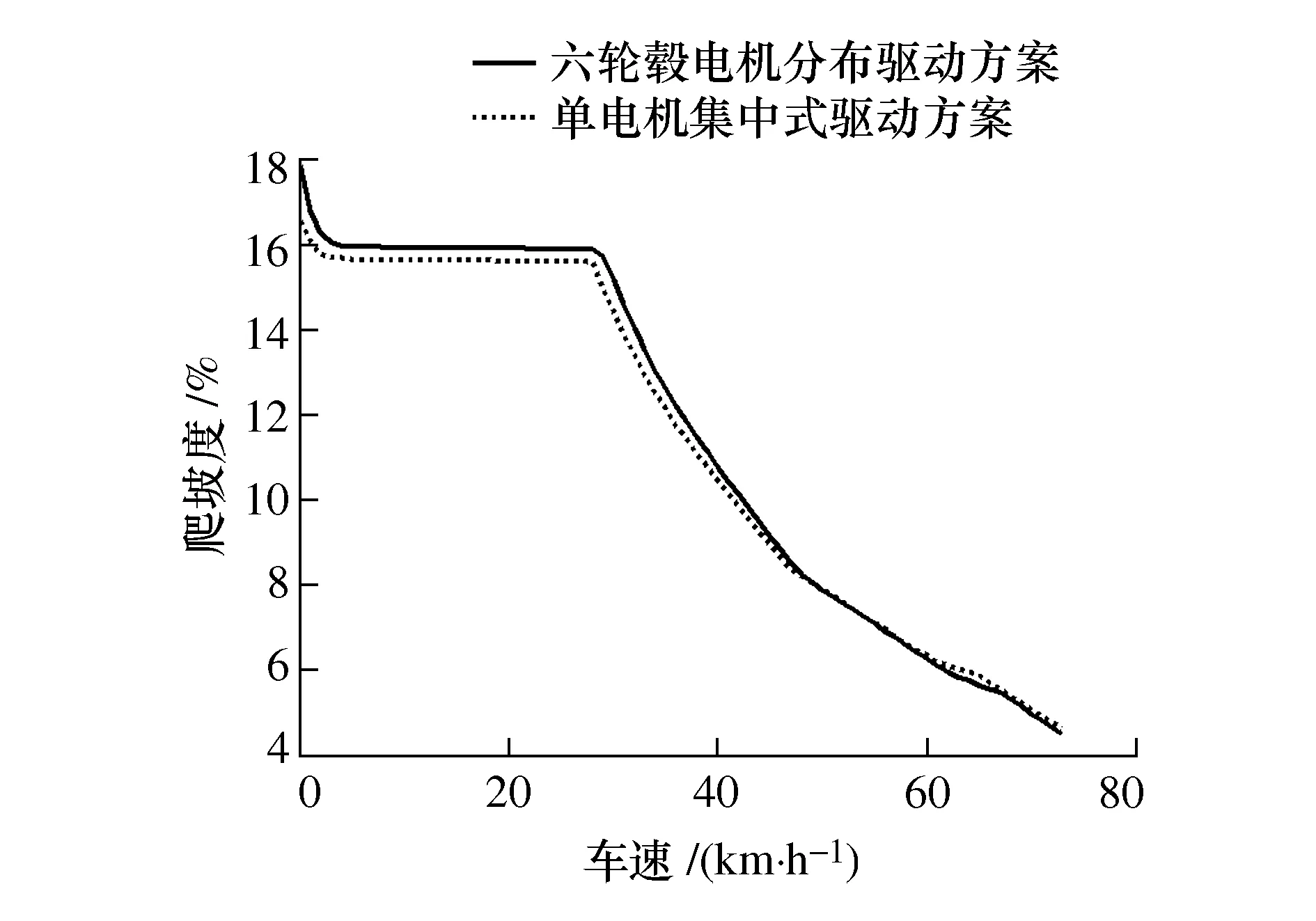
图10 最大爬坡度对比图
由图9可知,单电机集中式电动客车最高车速为80 km/h,0~50 km/h加速时间为18.5 s,六轮毂电机分布式驱动型电动客车最高车速为85 km/h,0~50 km/h加速时间为15.4 s;由图10可知,单电机集中式电动客车和六轮毂电机驱动型电动客车在车速为10 km/h的最大爬坡度分别为15.3%和16.6%。由此可知,两种驱动构型的电动客车动力性均能满足整车目标性能要求,六轮毂电机分布式驱动型电动客车的动力性高于单电机集中式电动客车。
4.3 经济性验证与对比
在满载中国典型城市公交循环工况(Chinese type city bus circle,CCBC)下,两种驱动构型的纯电动客车的经济性验证结果如图11和表7所示。
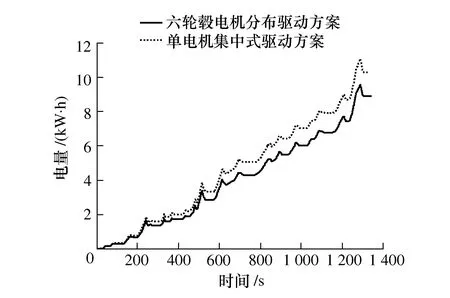
图11 CCBC工况下电量消耗曲线图

表7 百公里耗电量对比
由图11可知,单电机集中式电动客车和六轮毂电机分布式驱动型电动客车在一个CCBC循环下的耗电量分别为10.04 kWh和8.88 kWh。由表7百公里耗电量对比可知,两车的续驶里程均能达预期指标;在CCBC循环工况下,六轮毂电机分布式驱动型电动客车可有效提高整车经济性水平,相比较于单电机集中式电动客车,行驶100 km可降低能耗11.51%,续驶里程延长27 km。
4.4 控制策略验证
本文以满载CCBC工况为例,对基于效率最佳的扭矩优化分配控制策略的合理性进行分析。在CCBC满载工况下,整车需求扭矩、电机转速曲线以及车速曲线如图12和图13所示,驾驶员根据电机转速的变化请求扭矩,实际车速能够实时跟随目标车速,且误差较小,表明该策略对整车扭矩的控制与驾驶员请求一致。
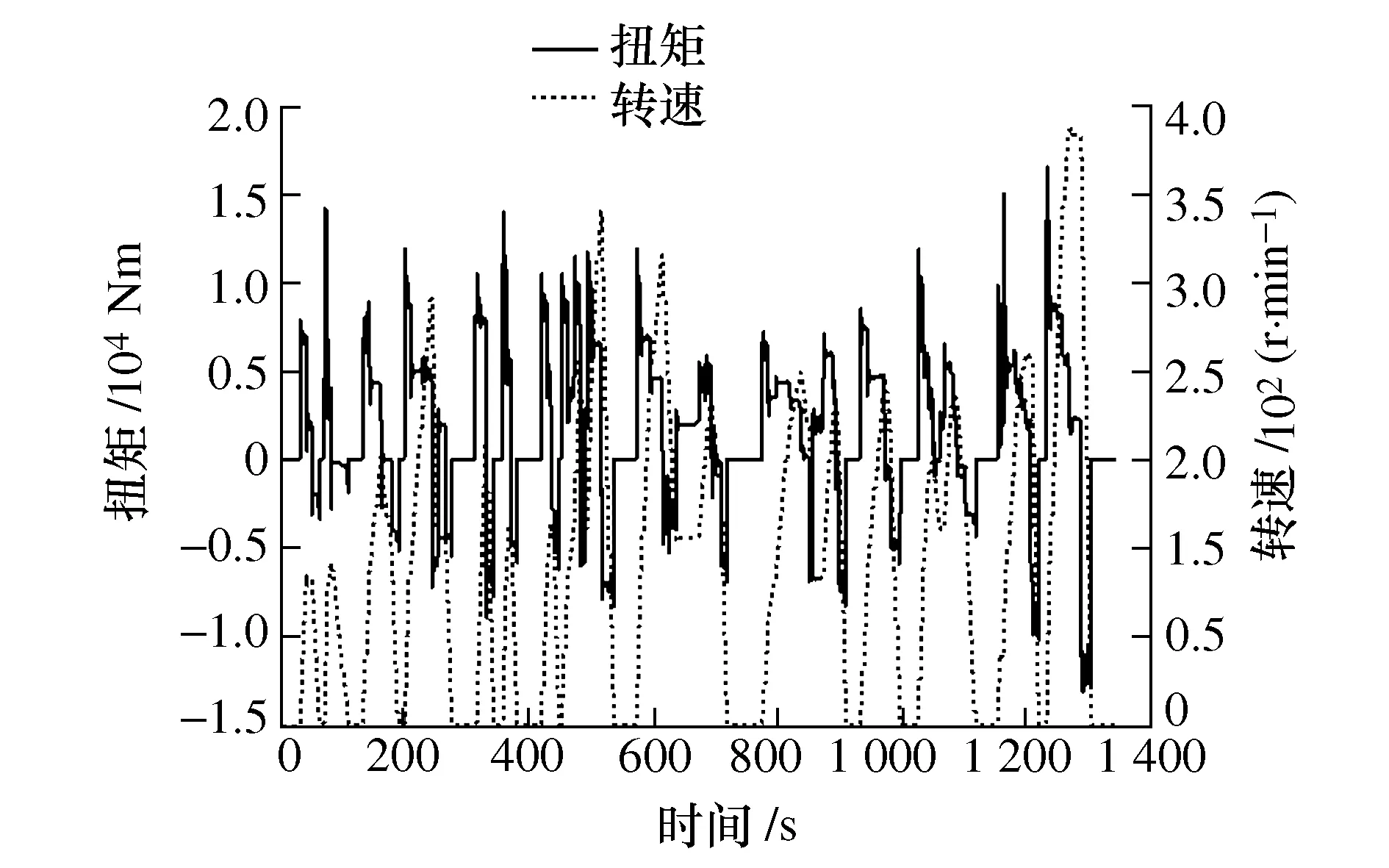
图12 整车扭矩需求和电机转速
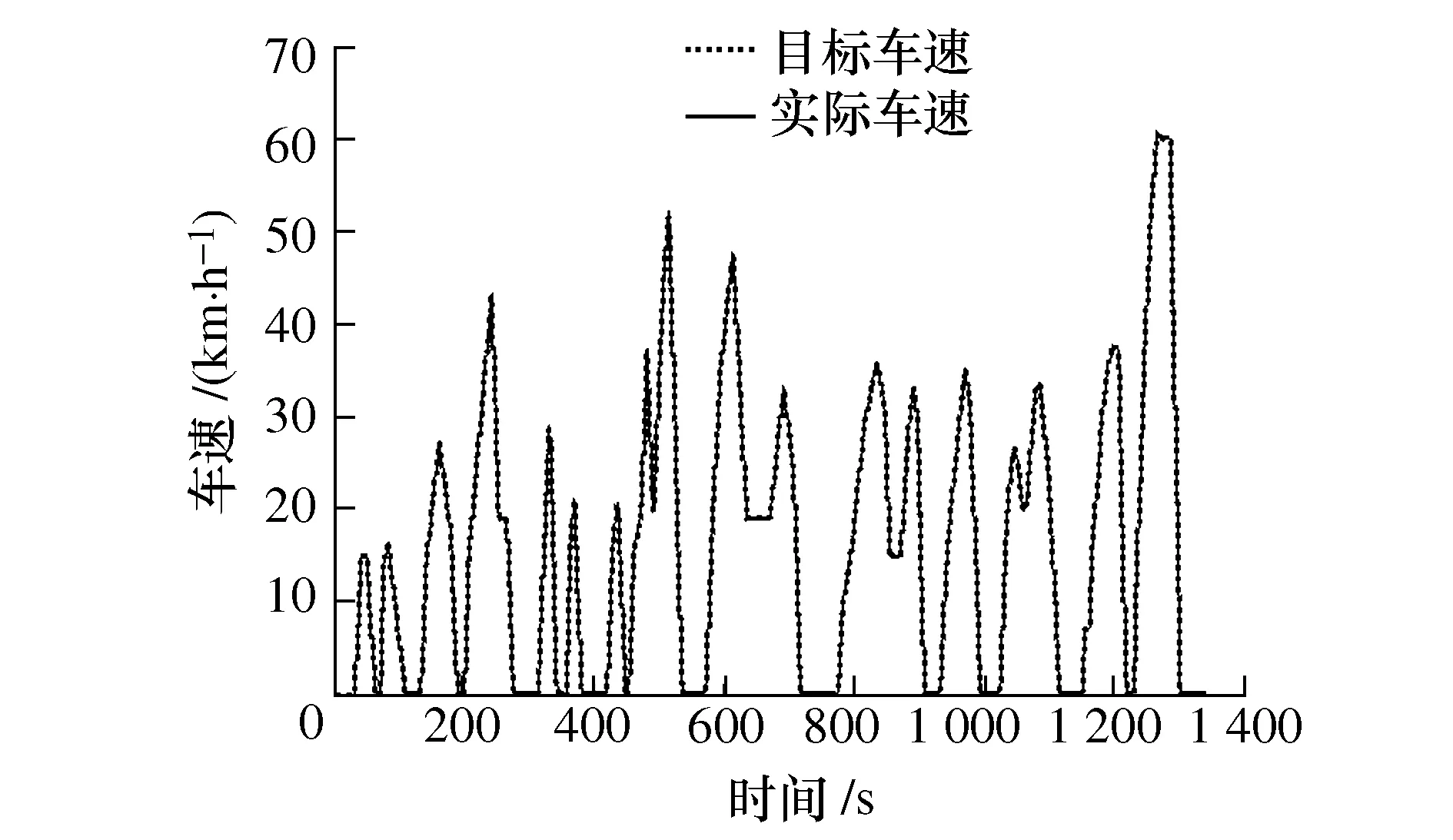
图13 CCBC工况下的车速曲线
在CCBC满载工况下,整车需求扭矩在前、中、后轴轮毂电机间的分配和各轴机械制动扭矩变化如图14~图16所示。由图可知,控制策略可将整车需求扭矩实时分配到各电机,在低负载工况下,整车需求扭矩低于5 000 Nm时,主要由前轴轮毂电机来提供,符合图3和图4中的扭矩优化分配结果;在中高负载工况时,中、后轴轮毂电机的负荷逐渐增大,并在高负载工况下,分配到前、中、后轴轮毂电机的扭矩值均在外特性附近,电机负荷较高;整车制动时的各轮毂电机制动扭矩较大,部分阶段接近峰值扭矩,仅在车速或电机转速较低时,由各轴机械制动器提供整车制动需求扭矩,说明在满足再生制动约束的前提下,系统可实现最大限度的能量回收。
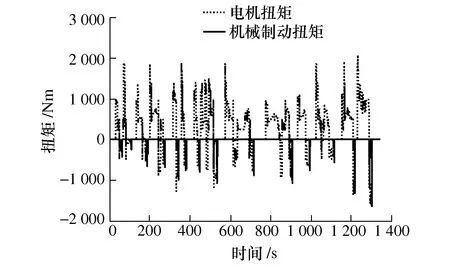
图14 前轴轮毂电机扭矩和机械制动扭矩
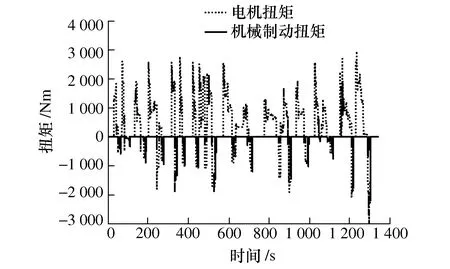
图15 中轴轮毂电机扭矩和机械制动扭矩
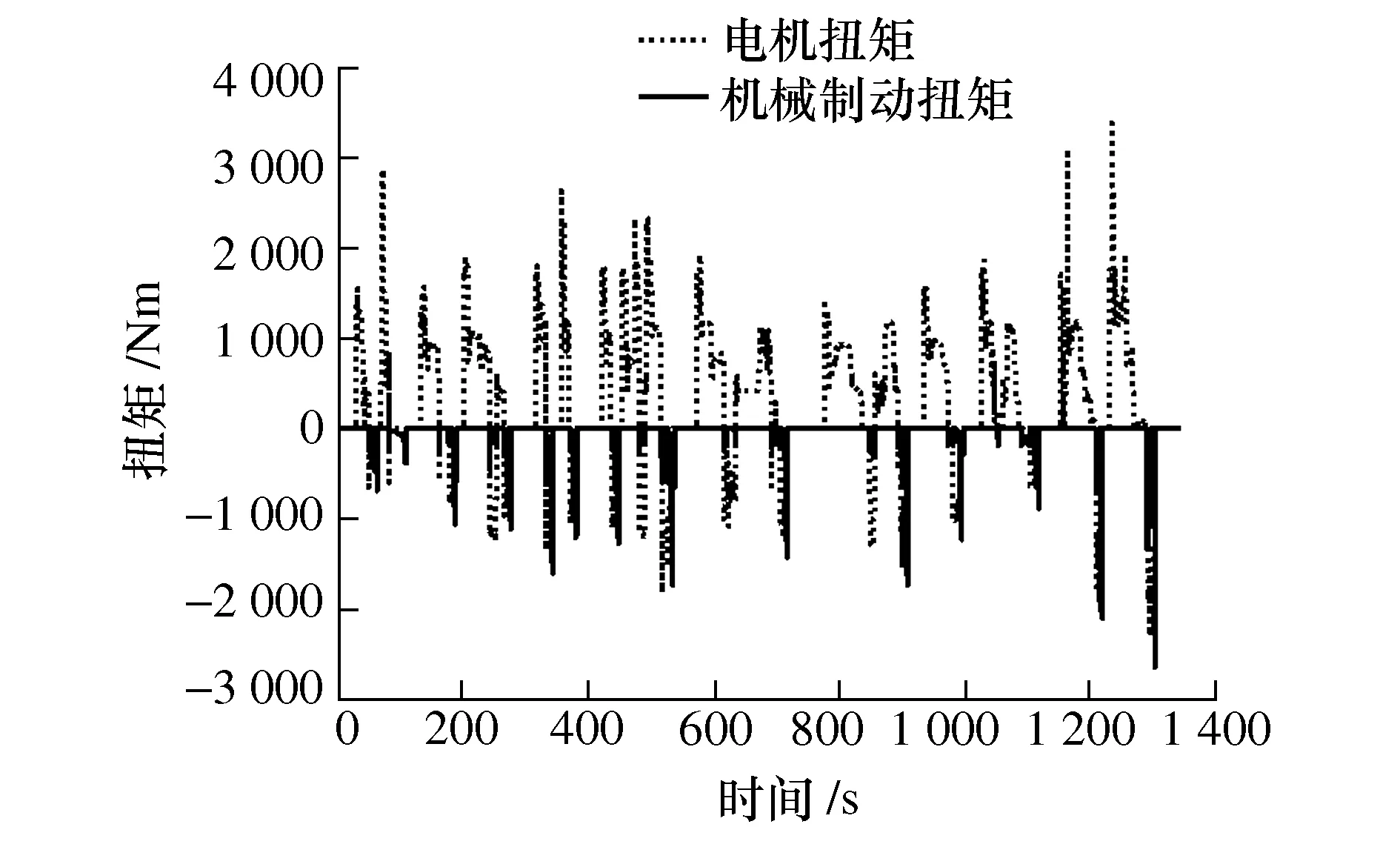
图16 后轴轮毂电机扭矩和机械制动扭矩
由图17可知,CCBC满载工况下,动力电池组的电压在560 V上下波动,其最大充放电电流均未超过400 A,在制动能量回收阶段,由轮毂电机给动力电池组的最大短时充电功率不超过220 kW,这表明动力电池的电压、电流、功率变化均在允许范围内。
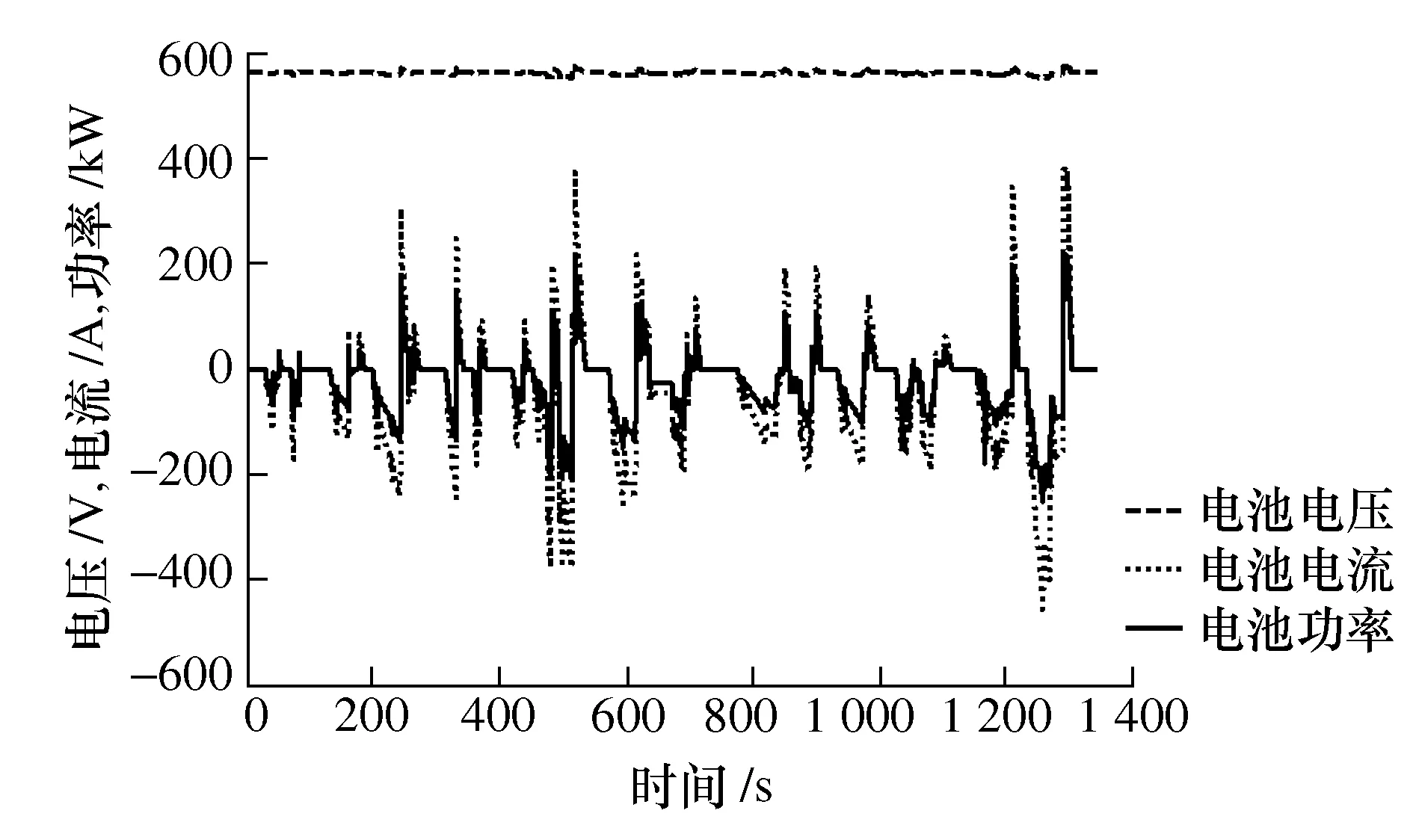
图17 电池电压/电流/功率图
5 结论
本文通过分析分布式驱动的优势和参考多电机扭矩分配的理论基础,对轮毂电机式三轴纯电动铰接客车的关键总成参数匹配和多电机扭矩优化分配控制策略展开了探索性研究。
1) 相较于传统单电机集中式驱动构型,在轮毂电机参数匹配问题上,本文根据三轴铰接式纯电动客车载荷分布,以充分发挥车轮附着能力为原则,得到前轴、中轴和后轴的轮毂电机基本参数。
2) 针对该构型特点,利用二次规划算法对整车扭矩优化分配数学模型进行了离线优化,得到了使系统总效率最佳的扭矩分配系数,进一步作为整车扭矩优化分配策略模型的查表数据,减小了实时计算的复杂程度。
3) 通过与单电机集中式驱动构型的仿真结果对比表明,本文匹配设计的六轮毂电机分布式驱动构型可有效提高整车动力性和经济性,所搭建的扭矩优化分配策略可将驾驶员请求的扭矩合理分配到各电机,优化电机工作区间,另外,整车处于制动模式时,在满足再生制动约束条件下可实现最大限度的能量回收,节能效果显著。
