基于滑模反步法的HSV被动容错控制设计
2022-08-30李兴胜
李兴胜
(中国船舶集团有限公司第八研究院,江苏 扬州 225101)
0 引 言
随着近年来空天飞行器的迅猛发展,运行于近空间的高超声速飞行器成为当前的研究热点。高超声速飞行器以超过5倍马赫速度再入的过程中,其机体在大气的作用下处于高温高压的恶劣环境,用于保障系统性能的执行机构极易发生故障,并造成难以估量的损失,因此研究高超声速飞行器的容错控制是极具意义的。被动容错控制是指不依赖系统当前的故障信息,发生故障时无需改变控制器结构与控制参数依然可以保障系统稳定与性能的控制方式,是以鲁棒控制的思想为基础发展而来。传统的鲁棒控制技术是使所设计控制器对系统模型的不确定性以及外部扰动具备一定的“容忍”能力,而被动容错控制是要在其基础上,还需具备对系统一定程度故障的“不敏感”,即具备故障容错能力。
本文针对公开的Winged-Cone飞行器在考虑舵面发生损伤故障下设计一种基于滑模反步法的被动容错控制器,并依据Lyapunov理论对系统稳定性进行分析,通过数值仿真验证与所设计的被动容错控制器的姿态容错控制性能。
1 动态模型
建立飞行器模型是分析与研究飞行控制的基础。与传统飞行器相比,高超声速飞行器(HSV)具有强耦合、强非线性、大包线、多交联、快时变以及飞行环境复杂等特点,其机身机构与环境发生的微小变化都会对气动特性与控制特性造成极大的影响。本节以公开的Winged-Cone飞行器为基础,给出无动力再入过程中的三通道六自由度动态模型及其气动力与力矩的计算方式。
空气动力由机体自身与气动舵面产生的,将其在速度坐标系上分解可得:

(1)


(2)
将空气动力在机体坐标系下分解,可得气动力矩为:

(3)
式中:,,分别表示滚转力矩,俯仰力矩以及偏航力矩;,分别为翼展长度与平均气动弦长;是质心到参考力矩中心的距离;=-sin-cos;力矩系数,,可由下列表达式计算得到:

(4)
下面给出HSV动态模型,包括飞行器质心的位移运动以及绕质心的转动运动。为研究方便,降低动态模型的复杂度,可忽略一些影响不大的次要因素并采用一系列假设。通过坐标系的建立,根据牛顿第二定律与动量矩定理并在坐标系下分解可得再入阶段十二状态六自由度动态模型微分方程组为:

(5)

(6)

(7)


(8)

(9)

tan+tancos-coscostan]
(10)
(11)

(12)

(13)
(14)

(15)

(16)
式中:、、表示飞行器在地面坐标系下的位置坐标;,为航迹方位角与航迹倾斜角;、、分别为攻角、侧滑角与倾侧角;、、分别为滚转、俯仰、偏航角速度;、为飞行器质量与速度;、、为各轴向的转动惯量。
2 控制律设计
反步法由Kokotovic于20世纪90年代提出,是能够有效地对非线性系统控制器进行设计的重要工具之一。在反步递推的过程中,引入虚拟控制概念,针对每一个子系统基于Lyapunov稳定性理论进行控制器的设计。模型的时标分离是指根据奇异摄动原理,将非线性控制系统分为内(快)外(慢)2个回路分别控制,根据第1节中给出的HSV六自由度非线性动态模型,将控制系统分为内回路的姿态角速率和外回路的姿态角,可写作:

(17)
式中:表示舵面控制量,是内外回路的输入量;,是模型不确定部分以及外部扰动的聚合项;表示损伤故障时控制舵面的剩余舵效。
其双回路非线性姿态控制系统的描述如图1所示。

图1 姿态控制系统时标分离控制框图
在进行控制器设计前做如下假设:

假设2:由于舵面的运动而对HSV所受气动力的影响相较于其他项很小,则设()=0,即忽略舵偏所产生的气动力,将其纳入扰动聚合项。
假设:时变外部扰动(),()有界,即存在正整数,对所有时刻有|()|,|()|。
令,,,又因(),因此姿态控制系统仿射非线性模型可写作如下形式:

()
引入姿态角子系统误差状态向量:
=-
()
式中:表示姿态角子系统期望指令。
引入滑模变结构控制原理设计姿态角子系统,采用积分型滑模函数写作:

()
将滑模函数式进行微分可以得到:


()
为使滑动模态在有限时间内到达滑模面,采用指数趋近律:

()
设计参数,得到姿态角子系统虚拟控制量:

++sgn())
()


()
引入姿态角速率子系统误差状态向量,同样根据滑模控制原理,设计姿态角速率子系统的积分型滑模函数以及指数趋近律,可得:


()
设计HSV姿态控制系统被动容错控制率为:

++sgn())
()
式中:min(),为容错设计参数,表示对舵面执行器损伤程度的最大容忍能力。
3 稳定性分析
本节将证明所设计的高超声速飞行器闭环姿态被动容错控制器的稳定性,首先定义滤波误差为:
(27)
考虑滑模函数与滤波误差,选取Lyapunov函数为:

(28)
对其微分,并将滑模函数、滤波误差以及虚拟控制代入,可以得到:



(29)
将所设计的被动容错控制律代入,可得不等式:



(30)


(31)
根据假设1可以得到:

(32)
式中:(·)是连续有界函数,根据Young不等式可以构造:

(33)
根据假设3可得:

(34)
由此可得:


(35)
设>0,是一个标量,只要令控制参数,,满足:

(36)
则有:


(37)
因此可得到姿态控制系统输出的跟踪误差满足以下边界限制:

(38)
据此可知,只要选取合适的控制参数,,,,可以使姿态角的跟踪误差无限小,稳定性证明完毕。
4 数值仿真
通过数值仿真来验证所设计的被动容错控制器的有效性。设定飞行器模型中的气动参数具有±30%的随机摄动,气动舵面可偏转角的范围是±30°,并且飞行器在运行过程中始终受到外部干扰力矩。在第5 s时发生故障,3个舵面损伤程度分别设定为0.3,0.4,0.5,即舵效矩阵为=diag(0.7,0.6,0.5),仿真结果如图2、图3所示。

图2 第5 s发生损伤故障时姿态角响应曲线
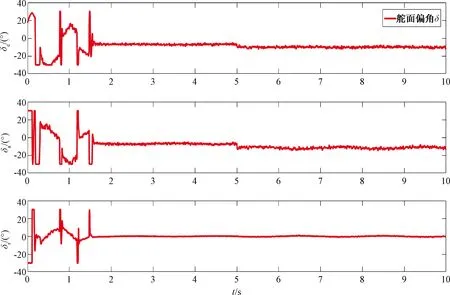
图3 第5 s发生损伤故障时舵面输出响应曲线
图2与图3表示舵面损伤故障发生在第5 s时,采用所设计的被动容错控制器下飞行器的姿态角与舵面偏角的响应曲线图,以验证所设计被动容错控制器对稳定姿态系统的能力。图中实线部分表示实际响应曲线,虚线部分表示期望跟踪曲线。从图2姿态角响应曲线中可以看出:在第5 s舵面发生损伤故障,采用被动容错控制器可以使飞行器姿态只产生一段幅度小、时间短的波动,后可继续维持在期望姿态上。图3的气动舵输出曲线可以看出:舵面在第5 s发生故障时快速做出反应,维持飞行器的姿态稳定。因此可以得出结论,采用所设计的基于滑模反步法的被动姿态容错控制器,使飞行器在受到外部扰动、模型参数摄动以及舵面损伤故障等各种不利条件下,依然可以保障飞行器姿态、控制系统的稳定性。
5 结束语
本文在考虑舵面执行器损伤故障下设计基于滑模反步法的被动容错控制器。首先根据奇异摄动原理将HSV非线性姿态模型进行时标分离的处理,将姿态控制系统变为内回路姿态角速率子系统和外回路姿态角子系统的仿射非线性形式。其次,利用反步法针对外回路姿态角子系统设计了滑模控制器,输出的虚拟控制量再采用动态面技术,经一阶滤波器变为内回路姿态角速率子系统的输入量。针对内回路采用滑模控制原理设计了被动容错控制器,所设计的被动容错控制器无需了解当前舵面故障的发生时间以及损伤程度等信息,并基于Lyapunov原理论证了其稳定性。最后通过数值仿真,验证了所设计的基于滑模反步法被动容错控制器在面对外部扰动、模型气动参数摄动,未知的舵面损伤故障等各种不利条件下,依然可以保障HSV姿态控制系统的稳定性,具有极强的鲁棒性与容错能力。
