一种基于三维目标模型及RCS库的目标回波模拟方法研究
2022-08-30彭新家周红峰
彭新家,朱 平,周红峰
(中国船舶集团有限公司第八研究院,江苏 扬州 225101)
0 引 言
随着模拟仿真技术的不断发展,其已广泛应用于雷达等领域,用于快速、低成本地检验雷达各项性能,以及支持雷达操作员的实操训练。特别是在雷达目标模拟方面,通过设计半实物仿真硬件实物和建立的数学模型,实现雷达目标回波的模拟。传统的雷达目标回波模拟方法,是将雷达的发射信号经目标调制后获取延迟信号,利用典型的起伏目标统计模型(Swerling1~Swerling4模型),实现基于统计规律经验的雷达目标回波模拟。然而,随着近些年来对电磁蓝军模拟的要求越来越高,仅依据统计模型的目标对象模拟,不能真实反映目标动态条件下的RCS特性,已不满足现阶段某些高逼真度模拟要求。为了实现更高逼真度的雷达目标回波模拟,本文拟通过建立典型蓝军目标的精细化三维目标模型,利用软件生成目标在不同工作频率、方位角和入射角的雷达截面(RCS)序列,形成RCS库。在目标模拟时,实时调用上述RCS时域拓展序列,与雷达发射中频基带信号进行卷积,生成具有目标RCS特性的雷达目标回波。因此,基于三维目标模型及RCS库的目标回波方法,可有效解决电磁蓝军目标模拟不逼真的问题,更全面地验证雷达对目标的探测性能,具有重要的研究意义。
1 目标对象模型研究
在生成目标RCS序列之前,需针对模拟的目标对象进行外型三维建模。目标对象的三维模型越逼真,在不同角度下越接近于真实目标的各模块组件(含负载)尺寸,后续生成的目标RCS特性数据也越接近于实际目标运动时的RCS值,从而也使模拟的目标回波越逼真。
因此,在依据有关目标对象的性能参数和相关资料完成三维建模后,需对该目标的模型进行验证,验证目标模型与真实目标模型的吻合度,最后再利用高吻合度的三维模型生成该目标的RCS特性数据。
1.1 目标三维建模
对目标进行三维建模,是为了模拟更加逼真的雷达目标,在雷达探测目标时呈现更真实的目标回波散射特性。所以,需针对具体雷达,选择其典型蓝军作战对象进行分析,如作战时可能遇到的飞机或导弹等。本文在分析研究时,选择一型战斗机,依据其详细机长、翼展、高度、进气口宽度等一系列战斗机几何尺寸,以及其在战斗时挂载的导弹参数,建立该战斗机高精细度的三维目标模型,其2个角度的展示效果如图1所示。
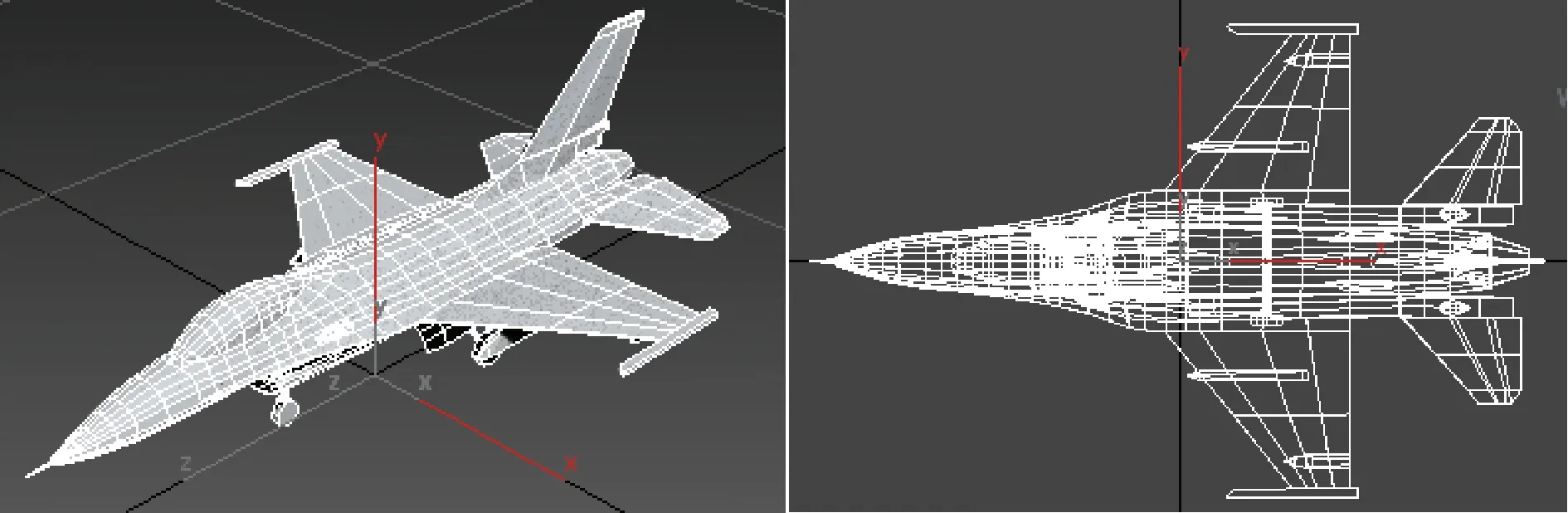
图1 某战斗机的三维模型
1.2 目标模型验证
在建立完目标三维模型后,需对目标模型的外观及几何尺寸进行验证。本文从模型几何尺寸和逆合成孔径雷达(ISAR)成像2个方面进行对比验证。
(1) 模型几何尺寸对比验证
在验证模型的几何尺寸时,从相关资料获取该战斗机在某一角度的实物照片,将建立的三维模型调整成同一视角,与实物照片进行重合对比,如图2所示。

图2 某战斗机的三维模型与实物照片对比
依据该战斗机的公开资料尺寸,结合模型的实际测量尺寸,获取模型各组件(含负载)的几何尺寸误差。若某一项几何尺寸误差超出误差允许范围,则对目标三维模型进行修正,直到满足误差要求为止。
(2) 模型和ISAR成像对比验证
将建立的目标三维模型进行特定角度下的RCS计算与ISAR成像,获得ISAR成像结果图像。
以上述战斗机为例,将入射角45°、方位角45°的垂直极化成像结果和三维模型进行对比,对比结果如图3所示。

图3 某战斗机的三维模型与ISAR成像对比
根据上述对比图可知,ISAR成像的战斗机轮廓与三维模型基本一致。
通过将建立的目标三维模型分别与实物照片及ISAR成像对比,获取了较为理想的目标模型,为下一步基于目标模型的RCS特性数据生成奠定了基础。
2 目标RCS特性数据生成研究
2.1 目标RCS特性数据产生
利用建立的高精度目标三维模型生成其RCS特性数据,主要是通过成熟的专业商业软件实现的。通过向软件中导入三维模型文件,调用软件中表面材料库,并设置各材料的分布。最后,通过设置工作频率、极化方式、入射角和方位角等参数,利用软件计算,获得上述条件下的目标RCS值。
因目标对象的RCS值与雷达的工作频率、发射/接收极化、目标相对雷达发射信号的入射角和方位角有关,而雷达在探测目标时上述参数均可能发生变化,故在借助目标RCS值进行目标回波模拟时,需建立覆盖雷达工作频率、极化以及不同入射角和方位角的目标RCS库,根据想定的目标运动轨迹和雷达工作参数,实时调用RCS库中对应的RCS时域拓展序列,与雷达回波模拟器中储频的相应信号进行处理,从而生成带有上述RCS特性的雷达目标回波。
为了方便调用目标RCS库,RCS库中的特性数据格式可如表1所示。

表1 目标对象RCS数据格式
数据存储时,可先后改变频率、入射角和方位角对RCS值进行依次存储。频率需覆盖雷达工作频点,可预设频率步进。入射角范围为-90°~+90°,方位角范围为0°~360°,预设角度步进。
2.2 目标RCS特性分析
在产生目标RCS特性数据后,对目标对象的RCS特性进行分析验证。将导出的RCS数据利用MATLAB软件进行分析,分析内容主要包括以下3个方面。
(1) RCS特性
在同一工作频率,就某一极化和入射角在0°~360°方位角下进行RCS仿真分析,获取该条件下目标对象RCS特性曲线。
以上述战斗机为例,在频率9 GHz、VV极化下,入射角为45°时,其RCS特性曲线如图4所示。
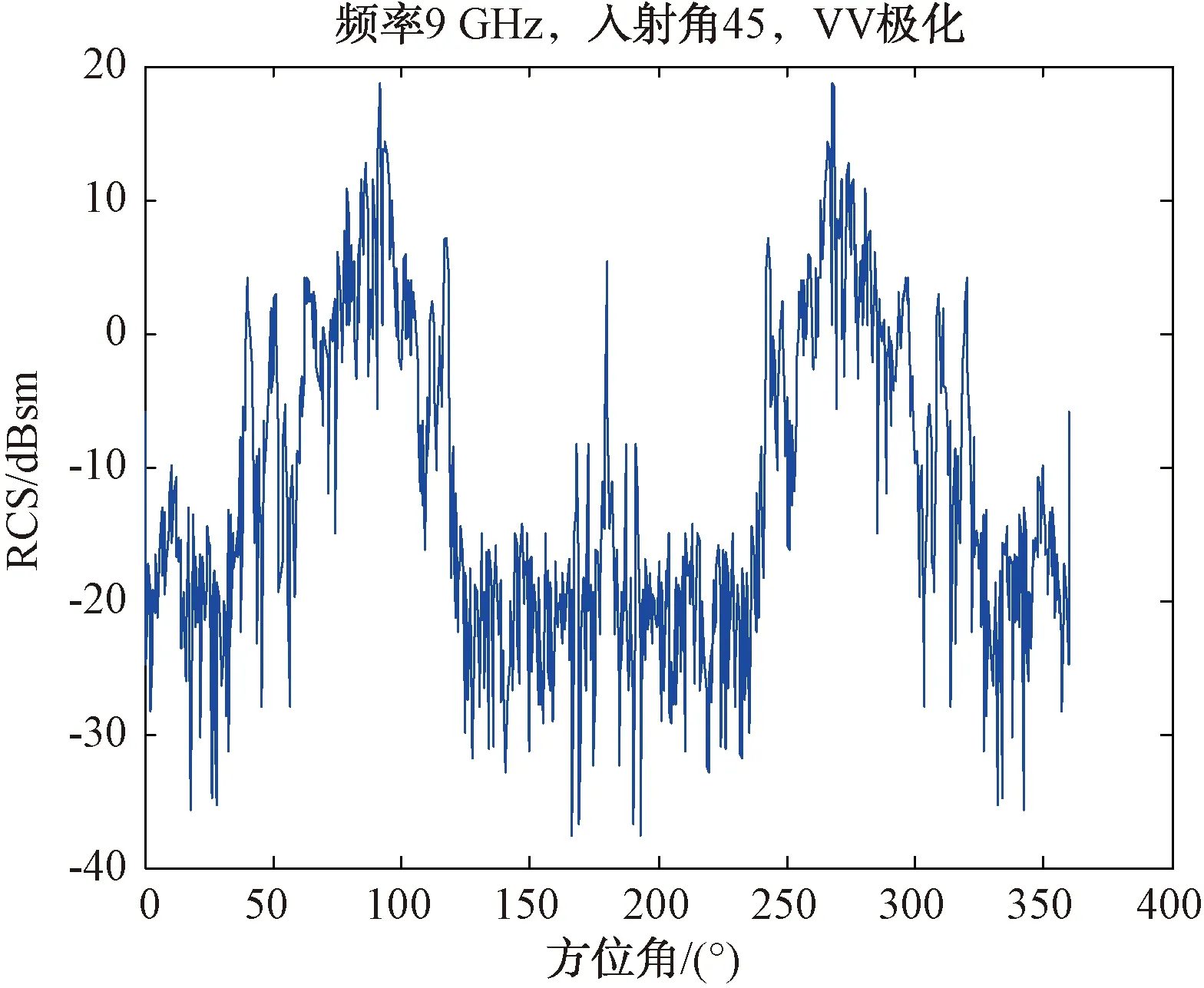
图4 某战斗机的RCS特性曲线图
(2) 高分辨率一维距离像
在同一入射角,就某一极化和方位角在一定频段下进行一维距离像仿真,获得该条件下目标对象的高分辨率一维距离像。
以上述战斗机为例,在VV极化、入射角45°和方位角45°下,频率范围为8.5~9.5 GHz时,其高分辨率一维距离像如图5所示。
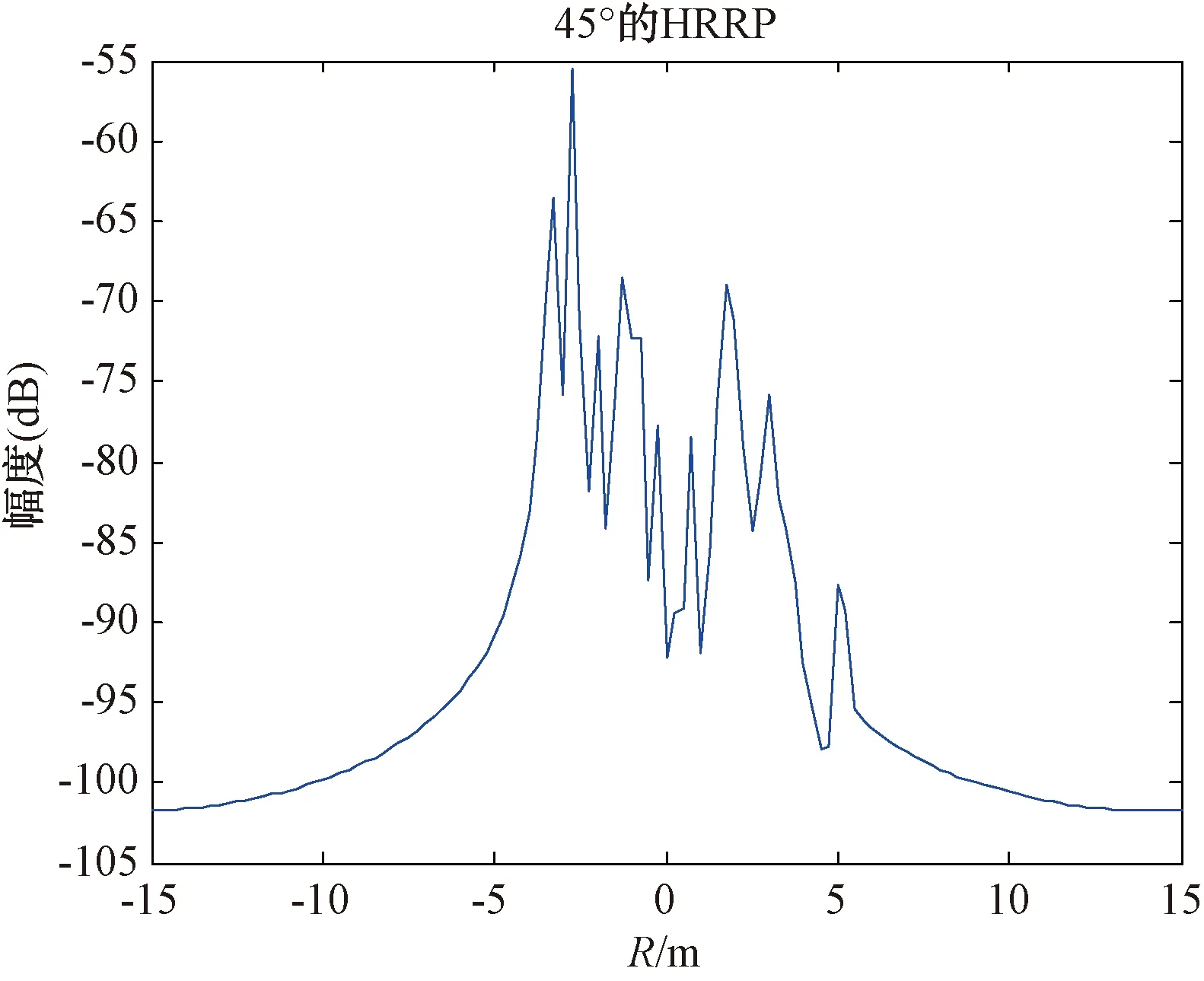
图5 某战斗机的高分辨率一维距离像
(3) ISAR像
在同一入射角,就某一极化在一定频段和一定方位角下进行ISAR仿真,获得该条件下目标对象的ISAR图像。
以上述战斗机为例,在VV极化、入射角45°下,频率范围为8.5~9.5 GHz、方位角范围为41.8°~48.2°时,其ISAR图像如图6所示。
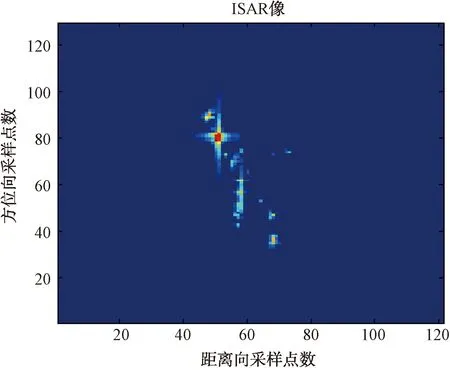
图6 某战斗机的ISAR图像
3 目标回波模拟研究
3.1 目标回波模拟方法
在完成目标RCS特性数据库构建后,将RCS数据与雷达激励信号进行卷积,经调制后生成雷达目标回波信号。
在目标回波模拟过程中,首先根据目标预设的运动航迹解算出目标相对雷达的角度关系(方位角和俯仰角),经插值形成目标的入射角和方位角序列。根据序列查询调用RCS特性数据,形成带有时间特性的目标RCS拓展时间序列。另一方面,雷达目标回波模拟器在接收到雷达发射激励后经下变频和数字储频,形成雷达中频基带信号。将该中频基带信号与上述目标RCS拓展时间序列进行时序卷积,经多普勒、幅度及时延调制后,进行上变频及功率放大,形成具有目标RCS特性的雷达目标回波信号。雷达目标回波模拟流程如图7所示。

图7 雷达目标回波模拟流程
3.2 目标回波模型
3.2.1 目标运动轨迹解算模型
目标以战斗机为例,其运动航迹存在直线、转弯、加速转弯和爬升等轨迹。在进行目标运动轨迹解算时,关注的是目标相对雷达的方位角和俯仰角,这就涉及到战斗机到雷达坐标系的转换。具体过程包括雷达地理坐标系到地心坐标系转换、目标地心坐标系到北天东坐标系转换、雷达北天东坐标系到雷达天线阵面坐标系转换以及雷达天线阵面坐标系到极坐标系转换。
(1) 雷达地理坐标系到地心坐标系转换
定义雷达的地理坐标为(,,),其地心坐标系为(,,),则雷达的地心坐标为:

(1)
式中:,,分别为雷达的经度、纬度和高度;,分别为地球的卯酉圈曲率半径、第一偏心率。

(2)
(3)
式中:,分别为地球的长半轴和短半轴,=6 378 136.49 m,=6 356 755.00 m。
(2) 目标地心坐标系到北天东坐标系转换
定义目标的地心坐标系为(,,),其以雷达天线阵面中心为北天动坐标原点的坐标系为(,,),则目标北天东坐标为:

(4)
式中:,分别为目标的经度和纬度。
(3) 北天东坐标系到雷达天线阵面坐标系转换
定义雷达天线阵面绕正东方旋转,绕地理北极旋转,目标在天线阵面坐标系下的坐标为(,,),则目标雷达天线阵面坐标为
(5)
(4) 雷达天线阵面坐标系到极坐标系转换
定义目标在极坐标下的方位角和俯仰角坐标为(,),则目标相对雷达的方位角和俯仰角坐标为:
(6)

3.2.2 目标RCS时域拓展序列模型

()=()·exp(j2π)
(7)
3.2.3 目标回波模型
现对雷达发射激励信号进行定义,记为(),则将采样点延迟和多普勒处理后的信号与上述RCS时域拓展序列进行卷积计算,即可得到带有目标RCS特新的雷达目标回波信号:

(8)
式中:为第个采样点的延迟,可根据目标速度和雷达距离进行计算。
3.3 目标回波验证分析
为了验证目标回波模拟的逼真度,将利用雷达目标回波模拟器模拟的目标回波数据与理论仿真数据进行对比验证。
(1) 利用一矢量信号源输出一定带宽的线性调频(LFM)信号作为雷达目标回波模拟器的发射激励,注入模拟器;
(2) 通过模拟器加载上述战斗机的目标RCS特性数据,按照本文描述的目标回波模拟方法,生成该战斗机的目标回波数据;
(3) 在目标回波模拟过程中,以某一采样率对回波中频信号进行采集,解析后进行脉压处理,获得回波信号匹配滤波后的脉压结果;
(4) 利用Matlab产生与(1)相同的LFM信号,作为仿真输入,并将(2)中的RCS特性数据加入调制;
(5) 以与(3)中相同采样率采样得到目标的回波中频仿真数据,同样进行脉压处理,获得仿真回波信号匹配滤波后的脉压结果;
(6) 将(3)与(5)中脉压结果进行对比验证,对比结果如图8所示。

图8 实际模拟目标回波与理论仿真数据对比
图8中曲线1为利用雷达目标回波模拟器实际模拟的目标回波的脉压处理结果,曲线2为理论仿真的目标回波的脉压处理结果。
在统计学上,采用皮尔逊积矩相关系统(PPMCC)来度量2个数据序列之间的相关性,是一种常见方法。其定义如下:
(9)

4 结束语
针对雷达目标回波模拟的问题,介绍了一种基于三维目标模型及RCS库的目标回波模拟方法。该方法通过建立模拟目标的精细化三维模型,利用软件生成该目标的RCS特性数据,形成在工作频率、极化、入射角及方位角几个维度的目标RCS库。在想定目标运动轨迹下,通过实时调用RCS时域拓展序列,利用目标回波模型,完成了具有目标RCS特性的雷达目标回波模拟。在目标回波模拟过程中,以某型战斗机为例,先后通过模型验证、RCS特性分析及目标回波验证分析,确保了目标回波模拟的逼真度。结果表明,该目标回波模拟方法是一种能够提高目标模拟逼真度的有效方法。
但同时,由于该目标模拟方法高度依赖目标三维模型及RCS库,需要获取模拟目标较详细的几何参数、气动布局及表面材料分布等信息,对情报要求较高。另外,目标模拟针对特定目标,模拟对象具有一定的局限性。
