多类型测向接收机高精度验证系统研究
2022-08-30廖明亮
廖明亮
(1.中国电子科技集团公司第二十九研究所,四川 成都 610036;2.四川省宽带微波电路高密度集成工程研究中心,四川 成都 610036)
0 引 言
在复杂电磁环境中对威胁目标进行精确测向定位对取得对抗优势尤为重要,目前主要依靠高精度雷达和测向接收机2种方式。雷达由于采用主动探测方式,发射的雷达信号接触到目标后再反射回雷达进行信号处理,信号需在空间中传播双程距离,损耗大,探测距离受限;而测向接收机采用被动侦收方式,只需接收雷达等目标发射出来的单程信号,具有探测距离更远的优势,而且还能对侦收到的信号进行分选识别,因此得到广泛应用。接收机通常采用干涉仪测向、比幅测向、数字波束形成(DBF)测向、时差测向定位等体制。本文针对各类接收机设计了一种高精度大动态验证系统,基于动态对抗场景规划想定,按照场景中敌我双方相对位置关系、目标信号参数、天线扫描特性等动态推演解算,驱动多台通用仪器生成多路幅相相参的射频信号,直接注入被测接收机,接收机解算多路带幅相关系的信号后完成测向,再将测向结果与场景中的实际位置关系进行比较,从而评估接收机的测向性能。该系统硬件部分采用通用仪器,具有高精度、大动态、高可靠性、可灵活重构等诸多优点,非常方便各类接收机的测试验证。
1 接收机测向工作原理及总体验证方案
由于干涉仪体制在接收机中应用最为广泛,本文重点以该类接收机为例,介绍其工作原理,并提出测试验证总体方案。该方案同时适用于比幅测向、DBF测向、时差测向定位等体制。干涉仪测角公式在众多文献中都有描述,应用非常成熟,这里不再赘述。
接收机的测向工作原理如图1所示。为方便示意,图1将对抗场景中的目标数量进行了最大程度的简化。对方只有一个目标,我方只有一个接收机,第三方只有一个通信或导航背景信号。在动态对抗场景的某一个具体时刻,三方面的相对位置确定,对方目标辐射出的信号照射到多通道干涉仪天线时,由于信号到达各通道天线的距离不同,会带来相位差异,干涉仪接收机正是通过解算多通道间的相位差完成测向工作。
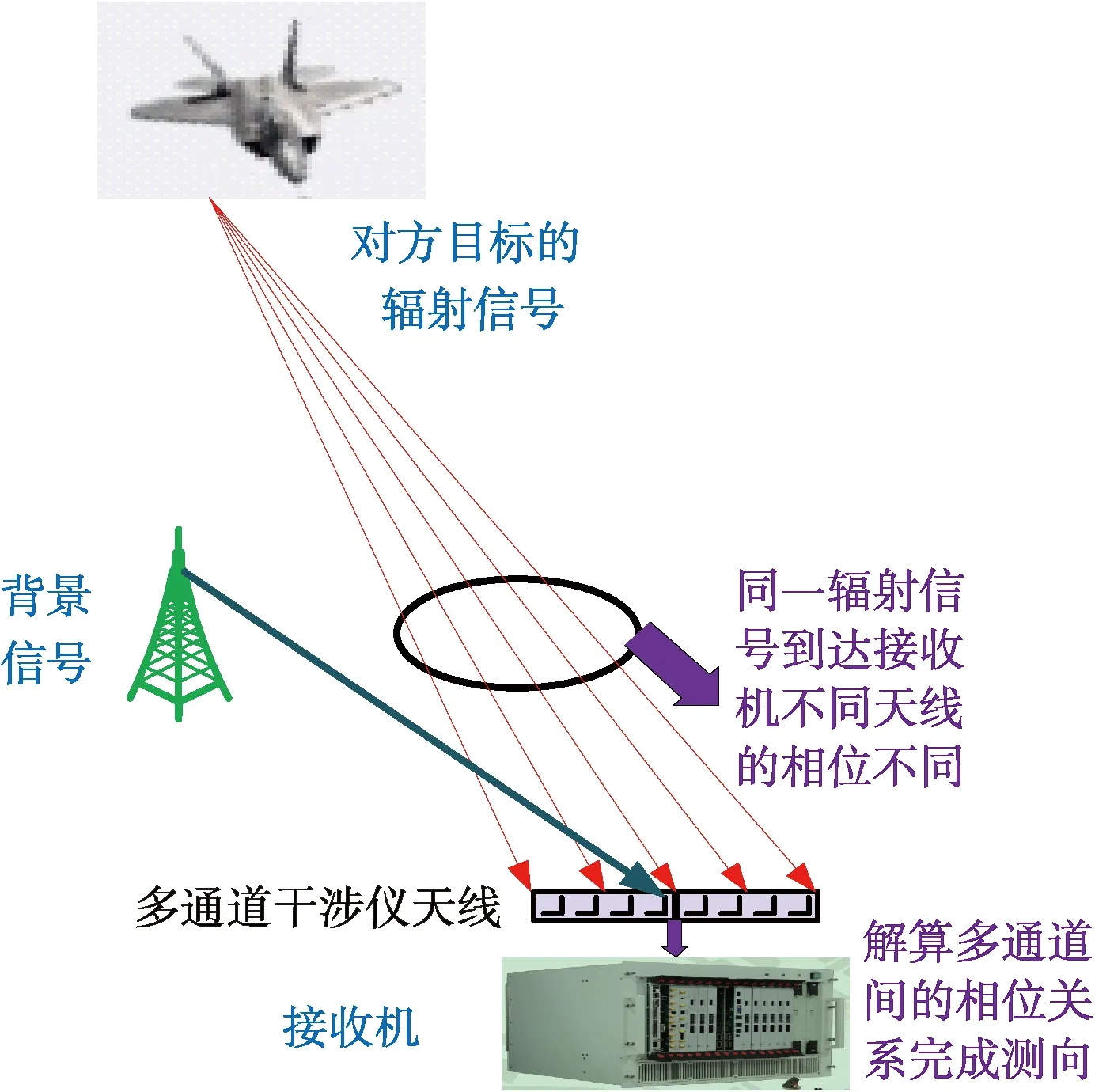
图1 接收机测向工作原理
为了在实验室内灵活开展基于动态对抗场景的接收机测向定位性能测试,本文提出图2所示总体验证方案。首先通过场景控制软件规划动态对抗场景,随后可启动场景控制软件按节拍推演解算,计算出每个时刻各目标辐射信号到达我方接收机各接收通道的信号参数及幅度相位关系等(幅度表征相对距离及天线扫描等特性,相位特征表征入射角关系,多普勒频移表征相对速度关系等),然后将各参数下发到多路相参射频信号模拟系统,驱动硬件按场景生成幅度、相位、多普勒频移受控的多路相参信号,射频注入被测接收机的多通道接收单元,使每个单元感受到的幅相关系与接收机带天线实际工作时一致,接收机解算多通道信号之间的幅度相位差从而完成测向、定位等侦收功能的验证。本方案支持在场景控制软件中导入被测装备外场辐射工作时的天线方向图数据,提高在实验室开展注入式验证的逼真性。本方案场景控制软件支持针对多个被测设备进行场景结算,并驱动多路相参信号模拟系统生成相参射频信号后同时注入多个被测设备,开展多接收机交叉定位等功能性能测试。
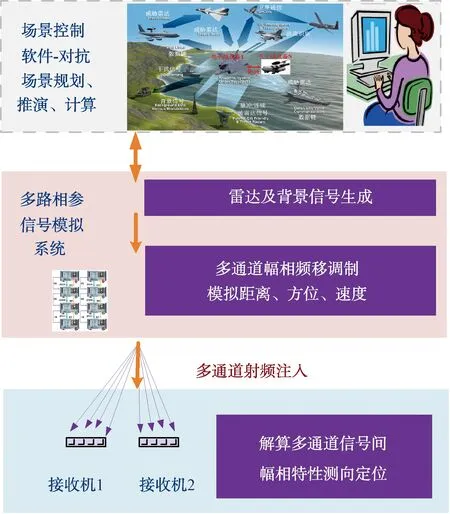
图2 接收机测向验证总体方案
2 接收机测试系统详细方案
本文采用专用场景控制软件和通用仪器搭建多路相参信号模拟系统,实现基于动态对抗场景仿真推演的多路相参射频信号生成。系统配备矢网、示波器用于各信号源通道间幅相、时差校准,也可配置开关阵用于各通道输出信号的自动校准。系统组成及原理示意如图3所示。
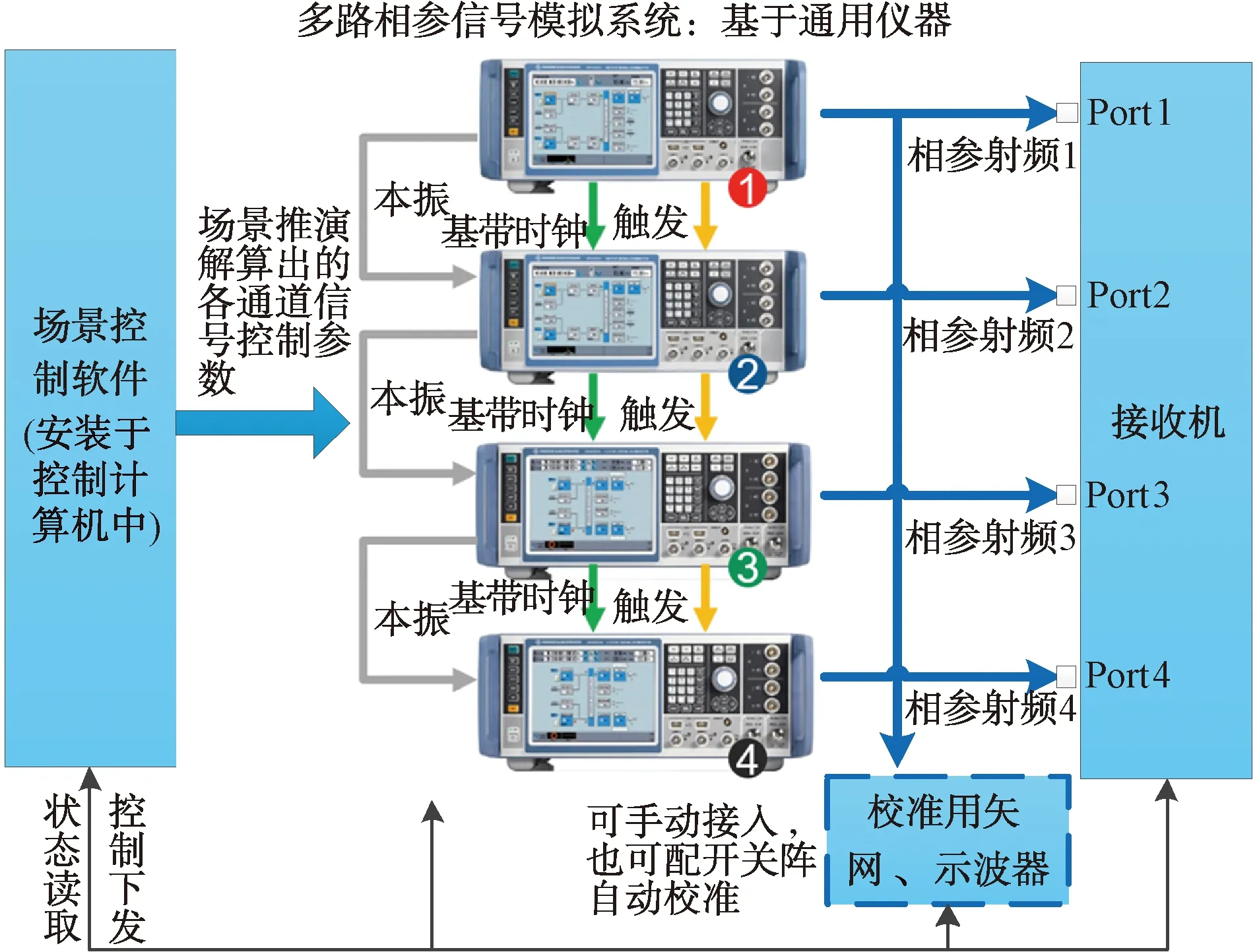
图3 接收机测试系统组成及原理示意
2.1 场景控制软件
场景控制软件安装在控制计算机上,在场景规划时可对各方运动平台进行航迹设置,对各平台上的辐射源进行信号参数、天线扫描参数等参数设置,对被测设备接收天线基线及位置参数等进行设置,能够按照场景推演实现相关参数的解算下发,控制各仪器生成多路相参射频信号,能读取被测设备上报数据并与场景数据对比后进行结果评估。能够实时显示和存储当前系统的工作状态、工作参数,提供系统状态保存、系统状态调用,能够按照校准算法实现系统各射频通道幅/相/时差校准,并会调用校准数据修正控制参数后下发给各信号源,是系统的控制核心。主要功能如下:
(1) 场景控制软件支持目标轨迹和航迹模拟(如图4所示),可以提供目标轨迹和航迹的输入和导入,能设置速度、加速度以及运动姿态等参数,能设置在航迹的具体位置点或时间点切换该运动平台上辐射源的工作状态或参数。
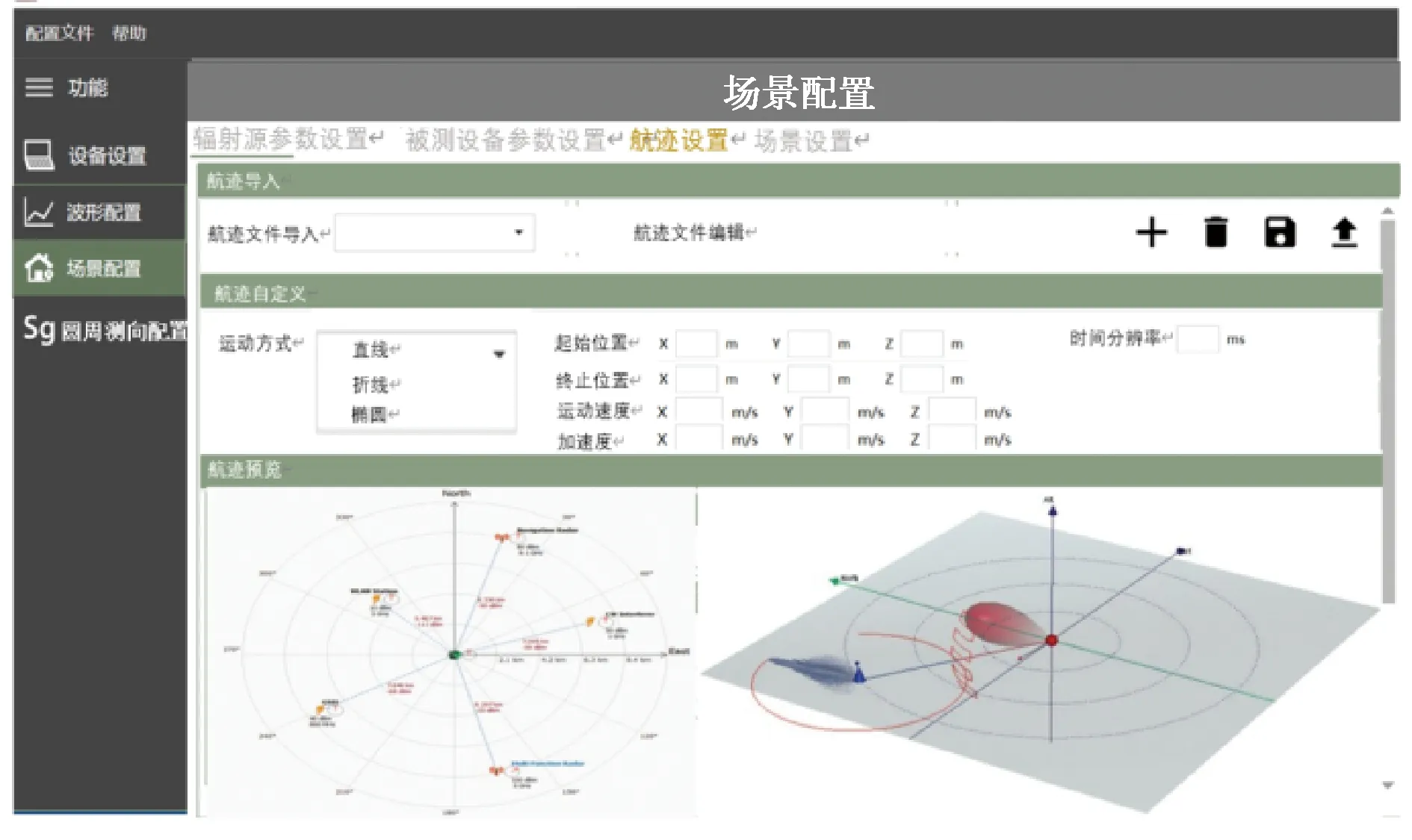
图4 对抗场景中各运动平台航迹设置
(2) 场景控制软件支持设置各类信号参数(如图5所示),包含工作频率、功率、重频、脉宽、各种脉内调制格式(线性和非线性调频脉冲信号、调频(FM)步进、调幅(AM)步进、二进制相移键控(BPSK)、正交相移键控(QPSK)等)、脉冲数量、天线方向图和安装位置等,支持创建、存储和调用复杂脉冲波形。

图5 信号参数设置
2.2 多路相参信号模拟系统(基于通用仪器)
通用仪器采用RS公司SMW200A宽带矢量信号源,通过共本振信号、基带时钟和触发信号实现多台信号源相参,4个通道以内应用时各同步信号采用图3所示菊花链直联,第1台矢量信号源将自身的基带时钟、触发信号、本振信号依次传递给其它3个通道,即可实现4路输出信号相参。通道数量增多时,为保证信号质量,需将本振等同步信号放大后再功分到其他宽带矢量信号源。
SMW200A宽带矢量信号源内部工作原理如图6所示。场景控制软件将解算出来的脉冲描述字(PDW)串通过网口传输到各台信号源内部缓存区,该步骤可离线下载一整段仿真场景的PDW串,也可将场景实时解算的PDW数据不停传输到信号源内缓存,信号源内部引擎读取缓存数据生成基带波形并完成幅度、相位、频移调制,最后经数模变换及模拟链路后输出射频信号。通过场景控制软件同步触发命令及系统触发控制机制可以实现多台信号源的同步及相参信号输出功能。
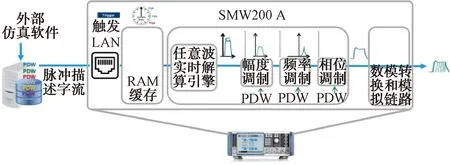
图6 SMW200信号源工作原理
2.3 多路相参信号校准
其主要由矢量网络分析仪、示波器组成,也可配置开关阵实现自动校准。校准过程为:场景控制软件设置各通道按所需校准的频率范围和步进,产生相位和幅度相同的连续波信号,并触发同步输出。输出的多路信号经电缆先后连接到矢量网络分析仪(仪器设为接收机模式),通过控制软件读取仪器数据后测量出每个通道之间的幅度差、相位差,然后用示波器测出通道间的延时关系,这些差值就是系统的固有误差。场景控制软件在校准结束后会保存各个频点对应的系统误差,并在将场景解算结果向各通道仪器下发控制参数时结合校准数据进行修正,实现多通道相参射频信号之间幅/相/时差的精确控制。
3 测试系统关键指标实现情况
3.1 可模拟的目标数量、脉冲密度及信号动态
本系统在带宽2 GHz以内可以快速改变相邻2个脉冲的频率、幅度等特性,以模拟具有多个目标的复杂对抗场景,此时矢量信号源内部的本振频率没有变化,频率和幅度的变化全部由PDW进行调节。图7为带内频率和幅度捷变的测试结果,使用宽带信号分析仪进行测试,其频率和幅度同时捷变的时间为95.9 ns左右,理论上可以模拟的最大脉冲密度大于1×10个/s,最大雷达目标数量达到100个以上。该场景适合对方目标的工作频率相差不超过2 GHz的情况,便于接收机在实验室内快速开展对多个运动或静止目标的测向定位、信号识别等功能性能的高效验证。
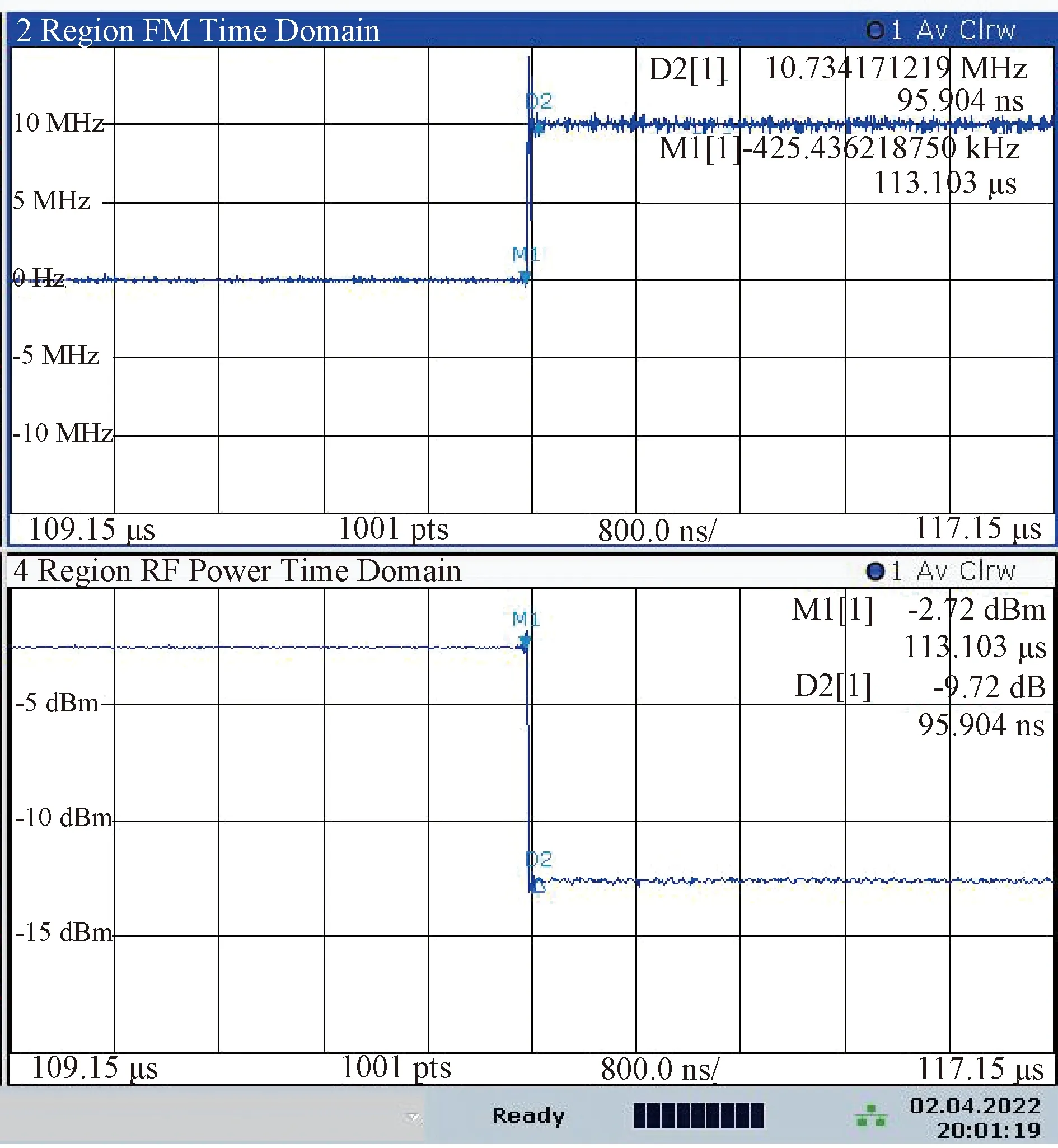
图7 2 GHz带宽内频率幅度同时捷变时间测试
如果对抗场景中不同目标之间的工作频率相差超过了2 GHz,则信号源在交错模拟不同目标的脉冲信号时,因频率捷变需改变信号源内部的本振频率,此时捷变时间约为400 μs,如图8所示。这会大幅降低脉冲密度和可模拟的目标个数,但通常接收机更关心重频、脉宽、脉内调制等信号参数,不同工作频率只是载频不同,可将载频改到2 GHz带宽内或采用分频段验证方式。如果要全频段多目标同时验证,则需增加测试仪器规模,用不同信号源模拟不同频段的目标,或者采用频率捷变速度更快更先进的仪器。
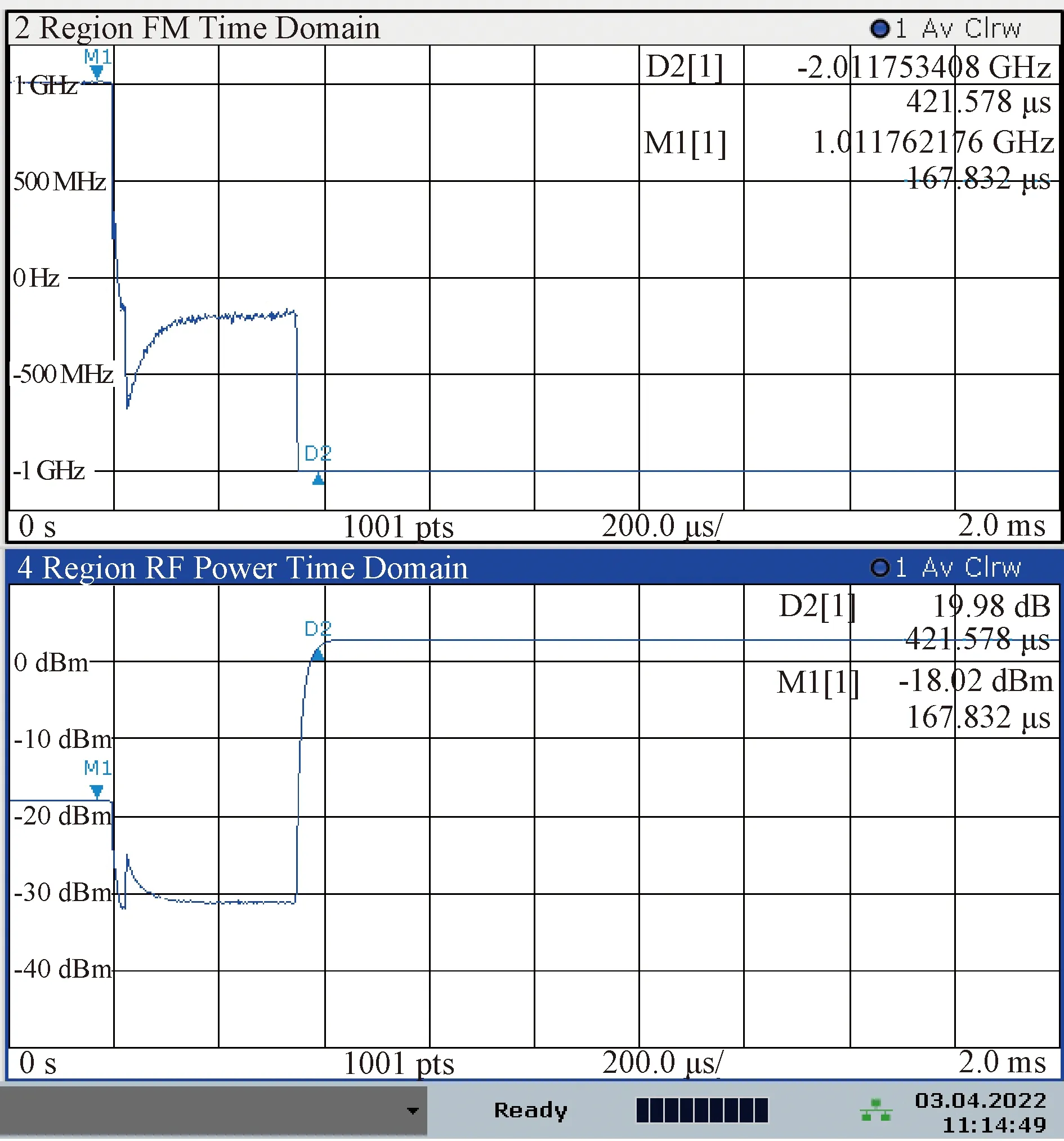
图8 2 GHz带宽外频率幅度同时捷变时间测试
图9为本系统幅度动态范围,对脉宽及捷变时间进行了加长,以清晰展示脉冲功率依次阶梯变化。可以看到,幅度动态约80 dB,可充分模拟不同目标与接收机之间由于输出功率、天线扫描、距离远近、入射角度等不同带来的功率变化,可适应更多的对抗试验场景。

图9 功率动态范围测试
3.2 多通道间幅度相位一致性
本文验证了四通道相参使用时的幅相一致性,如图10和图11所示。系统经校准后幅相精度较高,在18 GHz时四通道间的幅相一致性优于±1 dB和±1°。考虑温度、线缆和测试误差,结合以往经验,预计32通道间的相位一致性可控制在±5°以内。因此,本测试方案可胜任各类高精度测试场景,充分满足不同体制的测向定位算法验证。
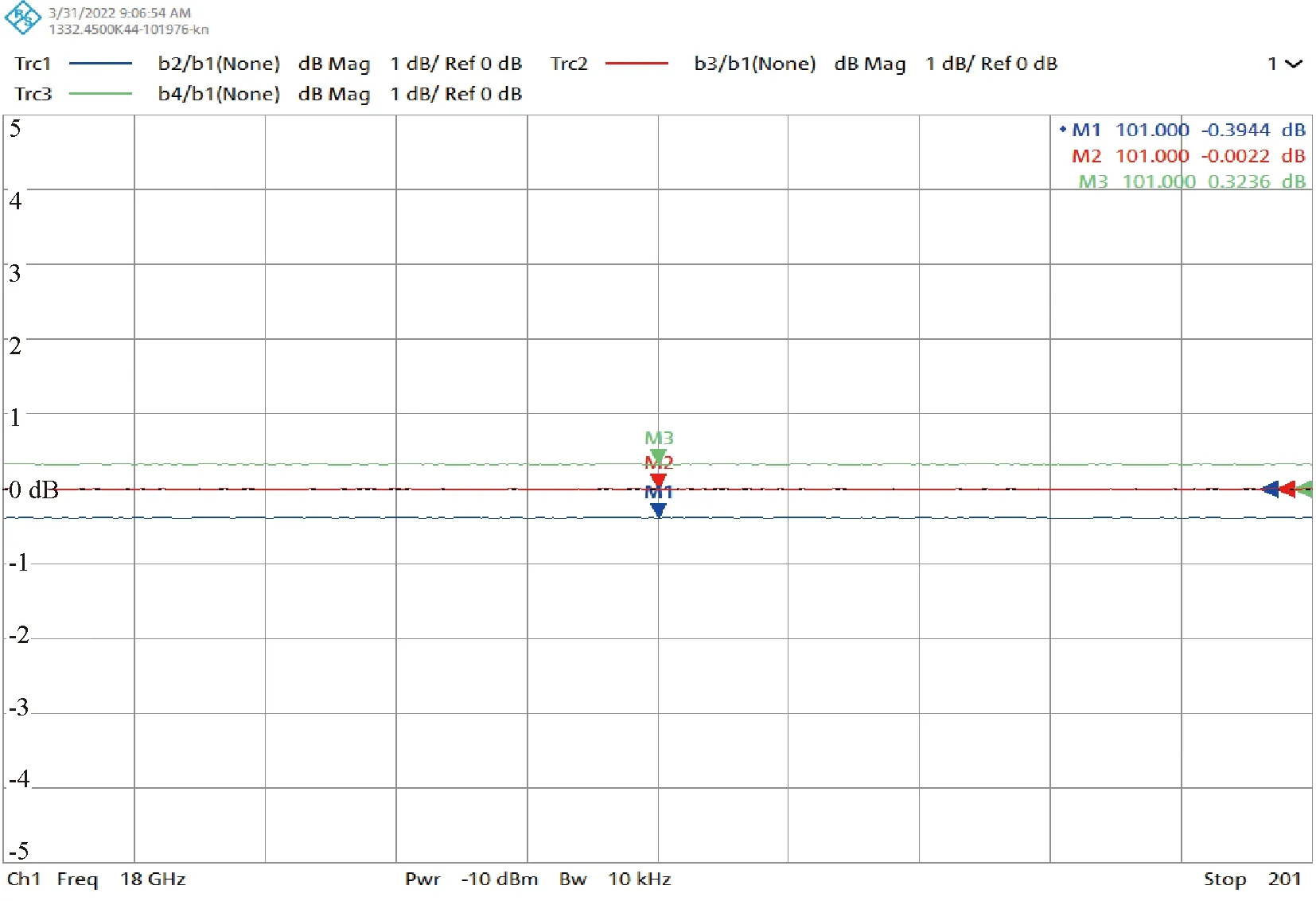
图10 多通道幅度一致性测试
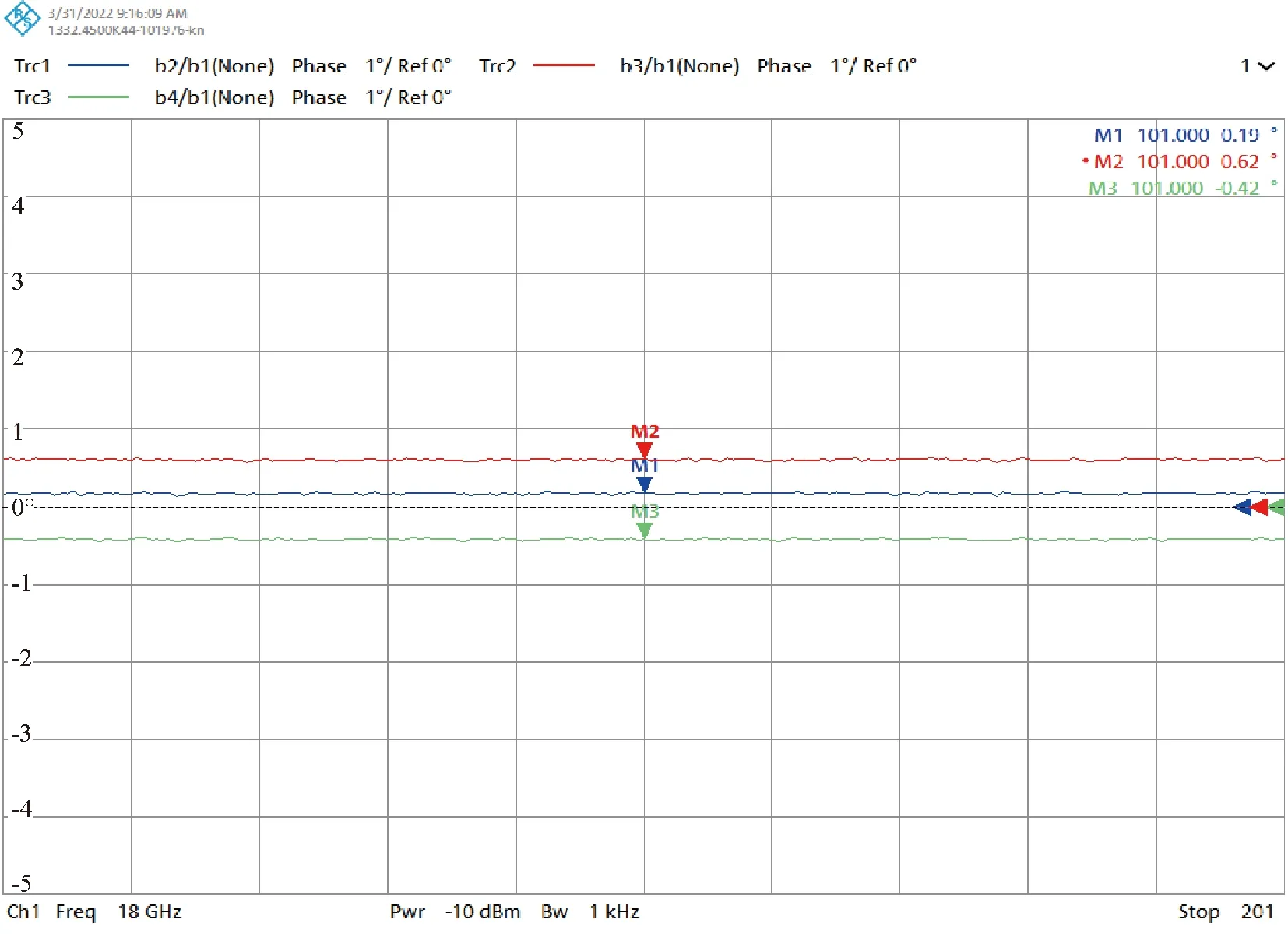
图11 多通道相位一致性测试
4 结束语
本文针对干涉仪、DBF、比幅测向等各类型接收机设计了一种高精度大动态验证系统。该系统可在实验室内基于想定的动态对抗场景进行推演、解算,随后驱动多台宽带信号源按需生成多路相参射频信号,直接注入多通道接收机,接收机通过解算通道间的幅/相/时差关系进行测向定位,最后再与场景中设置的真实值进行对比,评估测向性能。该测试系统在2 GHz带宽内可实现频率和幅度等参数逐脉冲高速捷变,捷变速度低于100 ns,可模拟每秒上万个脉冲和上百个目标的复杂场景。该系统基于专用场景控制软件和通用仪器组建,可灵活重构及扩展,可模拟各种复杂目标信号及扫描特性,各射频通道间的幅相一致性经校准后,可达到±1 dB和±1°(通道数量低于32时可控制在±5°),动态可达到80 dB以上,能满足各类接收机高精度大动态的测试需求。