基于CANOE的自适应巡航控制系统(ACC)测试分析
2022-08-29张国芳杨河清陆小川嵇书仿
张国芳,宋 伟,杨河清,陆小川,嵇书仿
(南京依维柯汽车有限公司,江苏 南京 211806)
随着网络和软件发展得越来越快,世界各国都在积极投入和推进智能驾驶乃至无人驾驶的发展。智能驾驶是利用先进传感技术、网络技术、计算技术、控制技术、智能技术,对道路交通进行全面感知,对每辆汽车进行交通全程控制,对每条道路进行交通全时空控制,实现道路交通“零堵塞”、“零伤亡”和“极限通行能力”的专门控制网络。软件定义汽车给汽车行业也带来了翻天覆地的变化,人们使用汽车也不仅仅只有代步或者运输这么简单的需求,对汽车的安全性和舒适性要求也越来越高。近几年国家为了减少交通事故的发生,中国法规也规定了各种不同用途的车型必须安装ADAS高级驾驶辅助系统的功能,而车企开发ADAS功能的目的也是为满足不同消费人群的需求和法规要求,因此在车辆上市前的功能测试显得尤为重要。本文针对自适应巡航控制系统(ACC)进行测试用例分析,可供商用车开发ACC功能并评估功能的方法提供参考。
1 概述
ADAS功能使用摄像头和雷达等传感器,在汽车行驶过程中实时感应周围的环境信息,收集数据,进行静态、动态物体的辨识、侦测与追踪,通过算法分析计算出道路环境,对可能发生的危险进行预警,从而预先让驾驶员察觉到可能发生的危险并采取措施,必要时ADAS直接进行对车辆的减速或制动控制,有效增加汽车行驶安全性和提高驾驶的舒适性。ACC系统是在定速巡航控制系统的基础上实现自动跟车功能,主要通过纵向控制技术实现了车辆的定速行驶、车间距保持(跟车行驶过程中的车间时距)、目标识别能力、弯道自适应识别能力、跟车行驶等功能,即如果发现前方车辆减速或检测到新目标,系统将向发动机或制动系统发送减速信号,以降低车辆速度,并使车辆和前方车辆保持安全行驶距离。而当道路上没有汽车时,它将加速到设定的速度,雷达系统将自动监控下一个目标。
2 简述ACC自适应巡航控制系统
ACC系统包括两种级别:全速自适应巡航控制(FSRA)和限速自适应巡航控制(LSRA)。FSRA结合EP和EPB电子驻车功能可以实现车辆的Stop-go功能和Autohold自动驻车功能。Stop-go功能即前车停自车停,前车走自车跟前车走,驾驶员通过设置与前车时距(远、中、近),实现跟车距离的远近,若前方没有车辆,ACC按照巡航设置的最高车速行驶。
限速自适应巡航控制(LSRA)目前很多车企都设在30~150km/h,只有在此车速区间车辆ACC功能才能被激活,LSRA多用于高速道路或者城郊路况,不需要频繁启停的工况。ACC作为车辆主动安全和提高驾驶员舒适性的关键系统,已经被越来越多的车辆配置。
3 ACC系统典型测试用例
ACC系统与车辆动力、制动纵向控制速度有直接耦合,是车辆中可靠性要求很高的控制系统,因此针对ACC功能和性能的实车道路及场地测试必不可少,对ACC在不同工况下的功能及性能进行测试,通过主观评价及客观的数据分析来定位问题,进而优化系统。
实车道路及场地测试过程中需要记录大量数据,包括传感器原始数据(Camera/Radar/Lidar)、控制器关键参数、整车CAN网络数据以及环境数据(GPS/天气/光照/道路/自定义标注等)。目前测试ADAS场景的工具主要有CANOE、CANLYZER和CANAPE。CANOE是德国Vector研发的工具,它是开发测试分析整个ECU网络和单个ECU通信而设计的总线通信分析工具。本文通过CANOE记录实车道路上的部分ACC典型测试工况进行分析。
3.1 ACC通过按键减速测试
在ACC激活后前方无车的情况下,驾驶员不需要踩制动踏板,通过set-按键可以使原定速巡航的车辆根据驾驶员操作和意图减速到一定车速。图1为ACC通过按键减速曲线图。
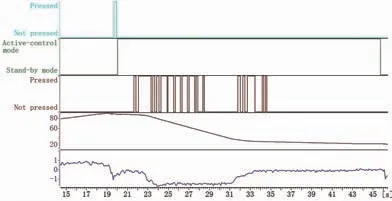
图1 ACC通过按键减速曲线图
图1中5条曲线,横坐标为采样时间,以秒为单位,纵坐标分别是ACC激活按键、ACC模式、按键set-键、车辆实际车速和纵向加减速度,以上5个信号来源于不同的控制器,其中ACC激活按键通过方向盘上的按键脉冲电信号发送给BCM车身控制器,通过BCM发信号到CAN总线上。ACC模式是ADAS控制器根据判断条件确定目前车辆ACC功能属于哪种工作状态发到CAN总线上,按键set-键的信号同ACC激活按键信号一样来源于BCM,车辆实际车速和纵向加减速由底盘ESP控制器发出信号。第1条曲线是通过按键将ACC从Standby模式激活到Active模式,第2条曲线是ACC的模式当前为Active激活状态,第3条曲线通过按键将车速从90km/h往下降到稳速30km/h,按键一次相当于一次脉冲,长按时巡航车速每次减小5km/h,短按时巡航车速每次减小1km/h,第4条曲线可以看出车速从开始激活后的90km/h稳速下降到30km/h,第5条曲线是加减速度的变化值,可以看出车辆加速时的加速度大于0m/s,车辆减速时减速度小于0m/s,从90km/h降到30km/h整个过程中的减速度控制在0~-2m/s,满足法规智能运输系统自适应巡航控制系统性能要求与检测方法GB/T 20608中5.4 ACC系统的平均减速度不应大于3.0m/s(以2s的长度按采样值求平均)。
3.2 超车辅助功能测试
自车车辆在跟随前车时如需要变道超车,驾驶员拨打左转向灯后自车开启超车辅助功能,驾驶员不需要踩油门踏板,自车会加速6s让驾驶员转入超车道,如果此时摄像头探测到左车道上有车辆行驶,车辆不会开启超车辅助功能。图2为ACC超车辅助曲线图。
图2横坐标为采样时间,以秒为单位,纵坐标分别是ACC模式、左转向灯指示、本车与前车的距离和车辆实际车速。从图中可以看出第1条曲线是ACC_Mode车辆在5s后满足条件进入激活模式状态,第2条曲线在33s时拨动左转向灯,开关拨动后左转向灯一直闪烁,所以出现很多规律脉冲,第3条曲线是本车与前车的距离,在转向灯拨动后开始进行加速6s,从图中可以看出拨动转向灯后两车距离明显缩小。在CANOE软件中测得从45m缩短到34m,第4条曲线是车辆的实际速度,在CANOE软件测得车速从68km/h加速到80km/h。从以上数据分析可以看出驾驶员左打方向灯后,车辆会进行加速让车辆从左侧车道快速超车。
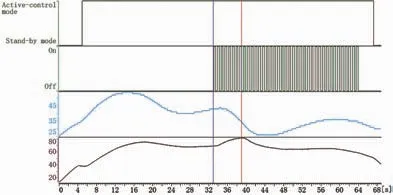
图2 ACC超车辅助曲线图
3.3 前车切出功能测试
切出测试的典型场景为自车以稳定速度跟随前方目标车行驶(目标车与自车的纵向中心面间距≤0.5m),达到稳定后,目标车驶出本车道。自车将重新搜索目标车辆,如果没有目标车,车辆重新按照设定的车速来调整速度。图3为ACC前车切出曲线图。

图3 ACC前车切出曲线图
图3横坐标为采样时间,以秒为单位,纵坐标分别是ACC模式、目标检测、ACC设置车速、前车车速、自车与前车的距离、车辆实际车速和车辆的加减速度。从图中第1条到第4条曲线可以看出ACC激活后并且能检测前车目标,第2条曲线在35s时前车的目标丢失,从第4条曲线可以看出前车车速在目标丢失后显示为自车的设定车速,在45s时由于第1条曲线ACC模式跳转到Stand-by mode,故第4条曲线的前车车速也随之为0,即ACC自适应巡航退出激活状态。第5条曲线是自车与前车的距离,在35s时通过第2条曲线看出前车目标丢失故此时与前车的距离也为0。第6条曲线是车辆的实际车速,在35s时出现目标丢失后车辆加速到设定车速100km/h。最后一条曲线是纵向加速度,可以看出加减速过程中,ACC激活状态时纵向加速度的值控制在2m/s以内,保证ACC过程中车辆加减速能够让驾驶员感受舒适。
4 总结
本文给出了3种典型的ACC测试用例,测试用例还有包括定速巡航和自适应巡航在平道、上坡道、下坡道和弯道时的加减速,跟车时前车和自车的切入切出,以及切入切出时前车的加速和减速,自车超车时临道是否有车等工况,我国法规《GB/T 20608智能运输系统自适应巡航控制系统性能要求与检测方法》规定了目标识别能力、直线探测距离、弯道自适应能力等相关场景测试及参数要求,采用CANOE工具分析数据并结合GB/T 20608进行测试评估,能够测试车辆是否存在错误的预警率、错误的加减速动作以及漏报警、漏动作等问题。
