港口自动驾驶现状及典型场景测试技术研究
2022-08-29和福建马文博田晓笛
和福建,马文博,田晓笛
(1.中汽研软件测评(天津)有限公司;
2.中汽研汽车检验中心(天津)有限公司,天津 300300)
1 引言
当前,随着中国经济的快速发展,全世界港口排名前10的就有7家在中国,同时港口的吞吐量逐年增加,造成了港口驾驶员的大量缺乏,经常有设备但无人操作的情况。随着社会的快速发展,在传统车辆上安装激光雷达、毫米波雷达、摄像头、OBU等传感器,配合自动驾驶计算平台和高精度地图,实现车辆的自动驾驶运行,从而港口码头集装箱运输向着远程控制、无人操作、自动装运的智能化方向发展,可以解决驾驶员缺乏的难题,提高安全系数的同时还能降低运营成本,提升运营效率。
从行业趋势来看,在智能网联汽车全面商业化运营中,商用车将会更先落地。从市场需求来看,驾驶的安全性和提高物流运行效率两大因素会更加促进自动驾驶商业车的落地,同时与乘用车相比,在自动驾驶场景和法律法规方面,商用车也有着先落地的优势。
车辆自动驾驶技术应用落地需具备充足的安全性保障,对此目前尚没有成熟完整的评价方法。同时由于相关法律法规现状的制约,高等级自动驾驶车辆要实现在道路上的运行还存在障碍,因而自动驾驶车辆技术和产品要给予实际应用进行迭代演进面临困难。在港口运行的自动驾驶车辆,具有不受法规限制、运行环境简单、投放技术经济性好等优势。场景的复杂程度是自动驾驶技术落地应用的关键因素之一。港口物流车绝大部分时间运行在非道路半封闭环境,交通环境简单、业务场景明确,因而是最有可能率先实现自动驾驶应用的车辆类型。同时,使用纯电动的无人集卡还可以降低港口设备的燃油成本,实现尾气零排放,对国家绿色港口的建设有重要意义。
当前应用在港口自动驾驶的主要车型有解放J7,在其搭载智加科技L4级别的港口作业系统,可以实现自动规划行驶轨迹、自动检测障碍物避障、自动检测装载状态及灯光系统、自动行驶至加油区加油,可完成自动装货、行驶、转向、停车、卸货等港口作业。解放ICV车辆能完成港口自动装卸、运输集装箱全流程工作,是国内首款L5级别港口示范运营车辆。重汽豪沃T5G,应用在天津港是一款纯电动车型,可实现装卸集装箱及运输过程的自动化。红岩5G智能重卡,利用5G-V2X技术实现精确停车与自动化港机设备交互。当前已有多家企业在国内港口进行了布局,如表1所示。
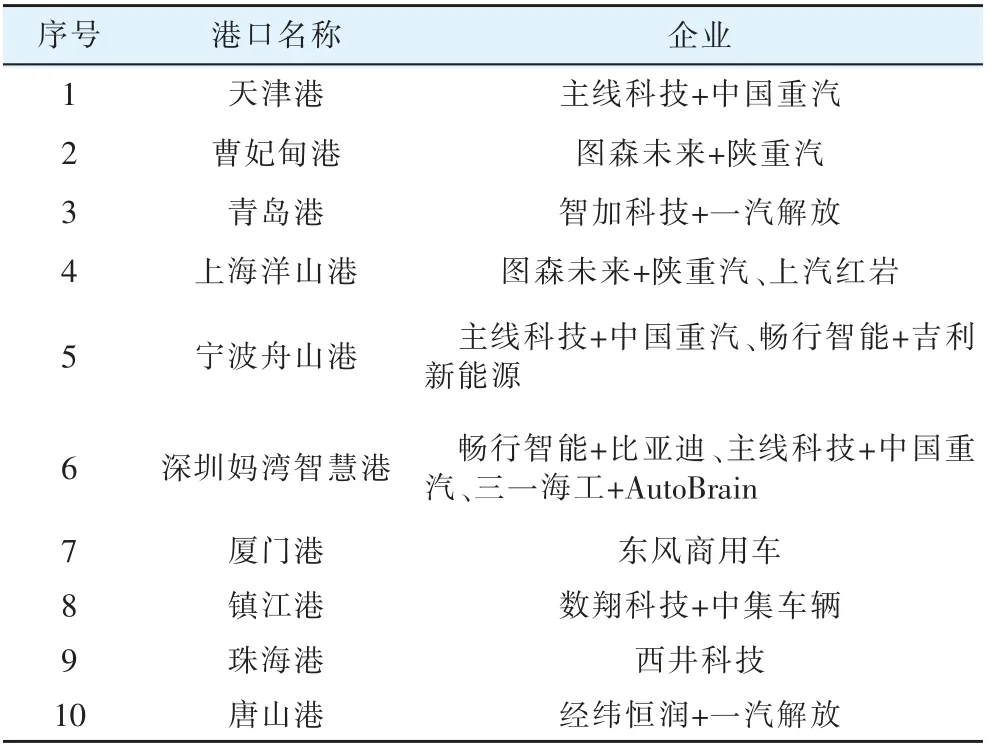
表1 国内企业在港口布局情况
2 典型场景测试
为验证车辆的自动驾驶功能,需设计相应的场景进行测试。对港口车辆自动驾驶功能进行测试时,需要建立人、车、路协同的应用功能场景。首先需要建立合适的测试场景,包括道路情况、交通状态、智能路侧设备等;然后需要建立可实施的测试方案,完成港口车辆自动驾驶功能的典型场景实现。
港口未来发展的趋势是集装箱的自动化运输。对港口的智能化改造主要有两种方式:第1种是采用自动导引车(Automated Guided Vehicle)加上地面埋设磁钉的方式,需要对基础设施进行大规模的改造,成本较高,且路线比较单一;第2种是采取无人驾驶牵引车,通过对车辆的智能化改造,可方便地在码头和堆场之间进行运输,成本相对较低,运输路线也更加灵活。两者之间的区别见表2。

表2 自动导引车与无人驾驶牵引车的比较
2.1 测试场景设计
对港口典型测试场景的设计可以从静态和动态两部分考虑。在静态部分需要考虑测试所需场地、测试场景和路侧设备的布置。测试所需场地的选取一般由测试需求来确定,路侧设备的布置主要考虑场地利用的高效性。在动态部分需要考虑场景设计的有效性和针对性。一般可从功能分析、测试方法、实际测试设备能力来进行设计。
在港口自动驾驶功能测试方面,检测项目的确定主要考虑以自动驾驶测试安全为底线、注重测试场景的典型性和代表性、注重测试的操作可行性和合理性。具体检验项目见表3。在外场测试时,应选择平坦、干燥的沥青或混凝土路面、清晰的交通标志标线、良好的天气环境、无复杂的电磁环境干扰等。

表3 智能网联汽车港口自动驾驶功能检测项目
2.2 落地因素
本文对影响商用车和乘用车自动驾驶落地的因素进行了分析,对商用车来说解决方案的成本是最重要的,其次是整车厂的接受程度、场景落地速度和技术;对乘用车来说最重要的是安全性和技术的成熟度,其次是消费者接受程度和出现事故后的法律责任问题。如表4所示。

表4 自动驾驶落地影响因素分析
3 典型场景及其分析
为了完成港口自动驾驶功能的测试,验证车辆的整体性能,根据表3所列的检测项目设计合理的测试场景,包括实验的场地、道路的选择、路侧的基础设施等,并对每个测试场景进行了分析。
3.1 TOS系统对接
如图1所示,测试车道为至少包含一条车道的长直道,测试车辆静止在车道上。测试车辆在自动驾驶模式下,发送登录消息到TOS系统,TOS系统发送相关任务命令到测试车辆,记录测试车辆的解析内容和确认信号。应连续进行10次测试,统计成功率和准确率。该场景主要目的是测试自动驾驶系统和TOS系统对接功能,评价测试车辆和TOS系统通信的能力。
3.2 吊机下精准对位
如图2所示,测试车道为至少包含一条车道的长直道,测试车辆匀速行驶。在吊机下方设置停车位。测试车辆在自动驾驶模式下以30km/h车速沿车道中间匀速行驶,以适当方式向测试车辆发出到达场桥并精准定位指令。该场景主要目的是测试自动驾驶系统和吊机纵向相对定位的能力。
3.3 装卸锁销
如图3所示,测试车道为至少包含一条车道的长直道,测试车辆匀速行驶。测试车辆在自动驾驶模式下以30km/h车速沿车道中间匀速行驶,以适当方式向测试车辆发出到达装锁区域指令。该场景主要目的是测试自动驾驶系统实现装卸锁销的能力。

图3 装卸锁销场景
3.4 自主充电/加油
如图4所示,测试车道为至少包含2条车道的长直道,测试车辆匀速行驶。测试车辆在自动驾驶模式下以30km/h车速沿车道中间匀速行驶,测试车辆初始电量/油量略高于阈值,行驶一段时间后,电量/油量应低于阈值。该场景主要目的是测试自动驾驶系统实现自主充电/加油的能力。

图2 吊机下精准对位场景

图4 自主充电/加油场景
4 结语
驾驶的安全性和降低物流成本是自动驾驶商用车落地的主要动力。和乘用车相比,商用车在自动驾驶方面有着更明确的目标、实际需求和商业场景,有着更早的落地时间。本文调研了企业在国内港口的布局现状,分析了影响自动驾驶落地因素,提出了智能网联汽车港口自动驾驶功能检测项目,设计了典型测试场景以及测试要求。但目前商业化落地也有几个难题亟需解决:①激光雷达等智能化设备还未达到车规级要求,成本偏高;②自动驾驶车辆如何保障安全;③缺乏规范技术和产品的产业标准;④相关法律法规不太完善。
